车床卸料工艺虚拟培训技术研究
2017-04-21 00:44:14杜宝江倪佳伟杜秋雨王衍昊
电子科技 2017年4期
杜宝江,倪佳伟,杜秋雨,王衍昊
(上海理工大学 机械工程学院,上海 200093)
车床卸料工艺虚拟培训技术研究
杜宝江,倪佳伟,杜秋雨,王衍昊
(上海理工大学 机械工程学院,上海 200093)
针对装备制造业对操作人员的专业技能和经验要求的不断提高,在机械培训中引入虚拟现实技术有助于解决这个问题。文中提出了机械工艺虚拟培训技术的设计理念和设计方法,利用VRML虚拟现实建模语言搭建虚拟培训场景及进行模型动作的控制,采用外部高级语言接口方式实现VRML与VB.net通信,提高了人机的交互性。设计完成了一种针对车床卸料工艺的虚拟培训系统,为培训机械操作人员提供了有效的解决方案。
虚拟现实;VRML;高级语言;交互性
基于虚拟现实技术的培训(简称虚拟培训),打破了传统培训模式的局限性,被越来越多的人和企业意识到了其重要性,培训需求呈增长趋势[1]。虚拟培训技术能为用户提供直观、友好的图形化培训环境,具有仿真性、开放性、超时空性、可操作性和安全性等特征,既有理论研究的价值,又有广泛的应用基础和市场[2]。被培训人员依托计算机就能实现被培训的目的,可使教育投入减少,效率大幅提高,不必担忧教育工作者本身影响教育质量,这也是虚拟培训的优势所在[3]。
1 系统设计
1.1 任务方案
被培训对象首先要熟悉相关工艺的流程,通过虚拟培训系统中的自动流程演示功能模块来学习掌握工艺知识,并通过其中的交互功能模块实现手动操作练习,达到理论结合实际的效果。如图1所示,是一台加工大型轴类零件的卧式车床,在该虚拟场景中具有多个可互动的区域,分别是:1.双刀架及操作手轮;2.四爪卡盘及操作手轮;3.卡盘架及操作手轮;4.顶针架及操作手轮;5.支撑环;6.机床操作面板(总电源、启动、停止);7.卸料放置区域;8.方向标识;9.上料堆料区;10.下料堆料区。被培训对象可在这10个区域内得到相应的培训和操作练习。

图1 虚拟场景互动区域示意图
1.2 系统构成
硬件组成:如图2所示,以PC操作终端为核心,采用图形工作站,26英寸专业图形显示器,1 920×800的高分辨率画质,能够把大型生产系统的整体运行环境和工位运行细节表达清楚。

图2 虚拟培训系统硬件组成
软件组成:如图3所示,虚拟培训系统分为场景建模、场景驱动和虚拟交互。场景建模是将虚拟场景与对象通过数学方法表达成存储在计算机内的三维图形对象的集合,采用VRML(Virtual Reality Modeling Language)[4-5]与3DMAX[6-7]作为场景建模工具,通过实时的方式完成场景模型建立,获得较为逼真的操作训练环境;场景驱动是根据所建立的场景模型以及场景中各类虚拟对象运行时的状态参数生成实时视景,通过解析数据信息和用户指令,生成相应的虚拟场景动作代码,从而实现场景中物体的运动控制以及场景视角的切换[8];虚拟交互是采用与实际设备操控界面相仿的虚拟界面,学员可以使用鼠标键盘等模拟操作,通过用户接口模块接收用户发出的各项指令并把执行后的数据、结果反馈给用户,从而实现与虚拟场景的交互。

图3 虚拟培训系统软件组成
2 场景建模
三维建模是整个虚拟培训系统建立的基础,主要包括几何建模和物理建模。虚拟系统的模型一般使用规定的格式来表达,目前常用的有VRML格式和3DXML等[9]。本文使用VRML建模语言构造了几个关键模型,如图4所示:(1)工件—粗加工后的轴,长度9 800 mm,直径500 mm,重量约15 T;(2)机床—TP150卧式车床,长15 000 m,中心高1 000 mm;(3)行车—双梁,55 T。
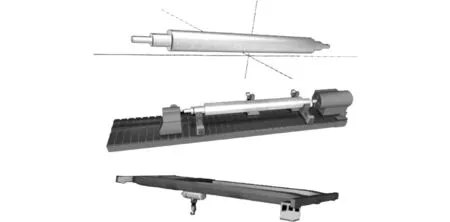
图4 虚拟场景三维模型
3 场景驱动
在虚拟环境中,动态的设备模型可以形象逼真地模拟出真实的车间加工场景,直观地反映出实际设备之间的运动关系。通过传感器和外界控制信息来驱动虚拟场景模型,在VRML中添加位置插补器(PositionInterpolator)和时间传感器[10](TimeSensor),将时间控制参数作为事件传送给位置插补器节点,插补器根据设计的时间关键点(Key)和动画关键值(Key Value)在浏览器中形成连续变化的动画效果。以双梁行车为例,在VRML中其驱动控制的关键代码如下:
DEF HangChe Transform {children[ ] }
# 定义行车静态模型
……
DEF Hook-TIMER TimeSensor
{cycleInterval 40 } #行车移动周期40s
DEF Hook-POS PositionInterpolator
{ #定义行车位置插补器
key [0,0.05,0.1, 0.2, 0.6, 0.8,0.85,1 ]
#设置行车移动周期
keyValue [0 0 2, 0 0 4.65, 0 0 4.65, 0 0 2.9, 0 0 2.65, 0 0 4.1, 0 0 4.1, 0 0 2]
#设置行车移动的各个位置坐标
}
DEF Rope-Script Script
{#吊绳运动控制脚本
eventIn SFVec3f P
#定义函数P为Script入口
field SFNode Rope USE Rope
#定义Rope变量表示吊绳物理模型
field SFNode RTT USE RopeTT
#定义RTT变量表示吊绳纹理模型
url "javascript:function P()
{Rope.scale[2]=(P[2]+0.59)/0.59;
#吊绳模型长度方向上的伸缩变化
RTT.scale[1]=2*(P[2]+0.8)/0.8;}"
#吊绳贴图纹理长度方向上的伸缩变化
}
4 虚拟交互的实现
在运用虚拟现实建模语言VRML搭建虚拟环境模型的基础上,通过对模型物理性质的约束,交互行为逻辑的建立,软件系统与外设硬件设备接口的开发和数据整合,以及对系统整体各种资源、接口的管理、采用外部高级语言接口EAI(External Authoring Interface)来实现人机交互[11-13]的方式,使人真正地参与到整个控制过程中,继而实现整个虚拟培训系统的应用交互。
4.1 系统图形用户界面建立
图形用户界面是用户与程序交互的方式,通过它可以接收输入信息并实时的输出虚拟环境的交互结果[14-15]。本文通过Visual Studio.net快速开发平台设计了图形交互界面,该交互界面分为两大块:一块是操作菜单区,分别为动态注解区,车床操作区,行车操作区和视点切换;另一块为虚拟车间场景浏览区。具体的界面功能模块如下:
(1)动态注解区,用于显示上次所实施的操作及设备状态;
(2)车床操作区,用于操作虚拟机床,共设计了9个步骤操作,具有步骤提示功能,如图5所示;

图5 车床操作面板
(3)行车操作区,用于操作虚拟行车,具有手动、自动的切换以及行车的调速功能,并设计了行车吊钩的互动操作功能,可实现张绳、收绳、挂钩与脱钩4个动作,如图6所示;

图6 行车操作面板
(4)视点切换,用于调整浏览区中虚拟场景的平面布局,方向移动,观察点浏览等,如图7所示;
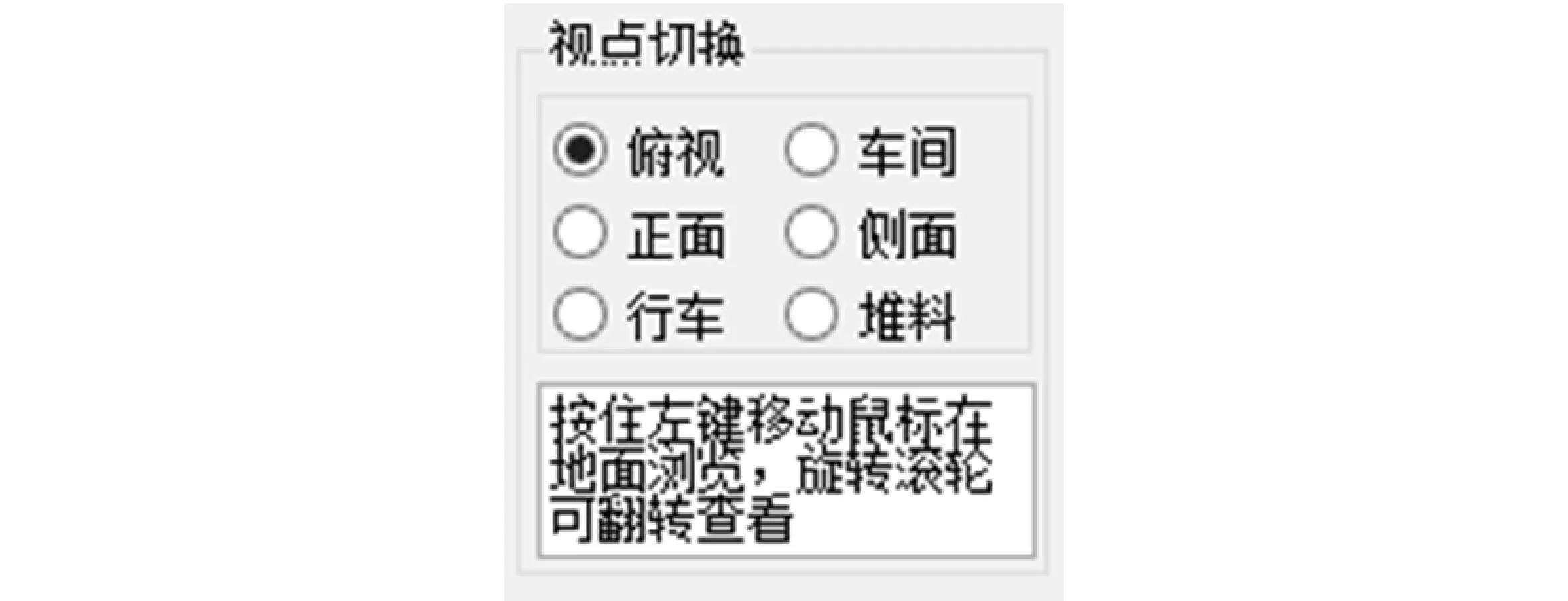
图7 视点切换面板
(5)浏览区,用于显示 VRML三维虚拟场景,如图8所示。

图8 虚拟场景浏览区
4.2 高级语言与VRML交互功能实现
本文采用BS Contact ActiveX 控件,是由Bitmanagement公司开发的一款可视化平台的编程插件,它是基于EAI的连接机制,是一种介于VRML虚拟环境与外部环境的编程接口,该接口提供用于 VRML 脚本节点所支持语言的接口,使得一个外部程序可以访问和控制现有的 VRML事件模型中的节点,提供方法,可操作属性,事件和相关对象[16]。
(1)初始化操作。初始化BS Contact窗口的位置大小,调用虚拟场景,初值预设等。其中AxContact3D是AxContact3Dlib命名空间下的类对象,AxContact3D1.url是调用虚拟场景的方法,代码如下:
Me.WindowState= FormWindowState.Maximized
∥设置程序窗口,Maximized是最大化值
AxContact3D1.url = "index.wrl"
∥BS Contact ActiveX控件调取.wrl格式文件;
(2)视点切换。在虚拟环境的演示过程中,通过自由旋转能够从不同角度观看虚拟场景中的物体。但是用鼠标旋转还是不太方便,视点定位也不准确。通过定义不同的Viewpoint节点,能够确立不同的视点。视点之间的切换要通过AxContact3D.viewpoint方法来实现。代码如下:
AxContact3D1.viewpoint="V_XieLiao_JiaGong_cam" ∥调用卸料加工的摄像机视角;
(3)场景控制。BS Contact ActiveX 控件的AxContact3D类中的setNodeEventIn()方法可实现对VRML场景的通讯传参,从而可以控制虚拟场景的动作。代码如下:
AxContact3D1.setNodeEventIn("HC-26-XieLiao", "RopeOpenClose", RopeScaleStep)
上例中,HC-26-XieLiao为双梁行车,RopeOpenClose为吊绳控制器,RopeScaleStep为数值参数控制张绳和收绳,正值张开,负值收起。RopeScaleStep的值赋给了吊绳控制器,通过计算输出给行车吊绳以实现动作。
最终完成的车床卸料工艺虚拟培训系统如图9所示。

图9 车床卸料工艺虚拟培训系统
5 结束语
虚拟培训系统能满足信息时代技能培训不断变化的需求,是一种高水平、高效率、低费用的新型柔性培训模式,它使得人员培训无论是在应用范围、时间选择、还是在培训的难易程度、绩效考核上都有着较强的优越性。本文利用VRML虚拟现实建模语言建立虚拟培训的场景模型,通过在虚拟场景中添加位置插补器和时间传感器,实现物体模型的驱动,通过对模型物理性质的约束,交互行为逻辑的建立,软件系统与外设硬件设备接口的开发、数据整合,以及对系统整体各资源、接口的管理,继而实现了整个虚拟培训系统的应用交互。最终设计完成了一套车床卸料工艺虚拟培训系统,为现代培训教育提供了新手段。
[1] 崔蔚,徐铁钢,韩卫华.虚拟培训技术及其系统开发[J].成都:成都信息工程学院学报,2003(4):361-366.
[2] 裘伟廷.虚拟现实技术与未来教育培训[J].中国培训,1999(8):51-52.
[3] 崔炜,周悦.虚拟培训组织的比较优势与培训模式[J].现代企业, 2007 (7): 10-11.
[4] 许爱军,张文金,易丹.基于VRML的虚拟现实技术及应用[J].计算机与数字工程,2009(4): 186-187.
[5] 陈华,陈福民.基于VRML的虚拟场景的设计与实现[J].计算机工程与应用,2002(6):127-129.
[6] 阎庆华,林大钧.SolidWorks结合AutoCAD与3DMAX实现机械产品设计[J].工程图学学报, 2004(3):58-62.
[7] 颜颖.基于3DMAX和VRP的虚拟现实研究[J].石家庄铁路职业技术学院学报,2012 (4):57-60.
[8] 刘晓明,李军,尹晓喆.虚拟培训技术在石油工业中的应用[J].大庆石油学院学报,2006,30(4): 126-127.
[9] 杜宝江.虚拟制造技术[M].上海:科学技术出版社, 2012.
[10] 王怀超.基于数字化工厂的圆锯片基体车间物流规划及仿真[D].山东:山东大学,2015.
[11] 马宁.基于VRML的仿人机器人三维场景建模与交互研究[D].哈尔滨:哈尔滨理工大学, 2009.
[12] 郭文峰,王莹莹,李锦阳.VRML世界中替身行为动态控制的实现[J].微型机与应用,2002(10): 55-57.
[13] Yusdi S,Edmond C.Building a networked 3D virtual environment using VRML and Java [J].IEEE Transactions on Computer Science,2000(2):538-541.
[14] 汤嘉立,姚正军,黄斌,等.基于VB和VRML的虚拟仿真实验系统[J].计算机工程与设计,2006(12):147-153.
[15] 商桑.齐学公.用VRML实现模型交互演示的方法[J].广西高教研究, 2002(4): 51-52.
[16] 王汝传,姚旭敏,王海艳,等.基于Java和VRML虚拟场景通信方式的研究[J].系统仿真学报,2003(7): 987-994.
Research of Virtual Training Technique for Lathe Unloading Process
DU Baojiang,NI Jiawei,DU Qiuyu,WANG Yanhao
(College of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093)
With the rapid development of equipment manufacturing industry, professional skills and experience of the operator continually increase demands, so their training is increasingly important. Introduction of virtual reality technology in mechanical training can help solve this problem. Proposing the design concepts and design method for mechanical process of virtual training technique , using VRML virtual reality modeling language to build virtual training scenarios and control model, Using external language interfaces to realize communication between VRML and VB.net and improved human-computer interaction. Finally completed a set of virtual training system for lathe unloading technology to provide efficient solutions and practical reference for training operators.
virtual reality;VRML;high-level language;interactive
2016- 05- 24
杜宝江(1962-),男,副教授,硕士生导师。研究方向:虚拟制造技术等。倪佳伟(1992-),男,硕士研究生。研究方向:虚拟制造技术等。
10.16180/j.cnki.issn1007-7820.2017.04.038
TP391.9
A
1007-7820(2017)04-152-04
猜你喜欢
施工技术(中英文)(2022年21期)2022-12-12 03:22:50
山东冶金(2022年2期)2022-08-08 01:51:54
内燃机与配件(2022年2期)2022-01-17 23:46:44
农家参谋(2020年4期)2020-06-15 02:55:38
装备制造技术(2020年12期)2020-05-22 09:24:58
科教导刊·电子版(2018年5期)2018-06-07 09:37:32
电子制作(2017年20期)2017-04-26 06:57:34
汽车与安全(2016年5期)2016-12-01 05:22:12
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11