
基于S7-1200的全液压动力猫道机控制系统的设计与实现
2017-04-21 05:49王宇翔王元忠芦光荣夏立超
电气自动化 2017年2期
王宇翔, 王元忠, 芦光荣, 夏立超
(兰州兰石能源装备工程研究院有限公司,甘肃 兰州 730030)
基于S7-1200的全液压动力猫道机控制系统的设计与实现
王宇翔, 王元忠, 芦光荣, 夏立超
(兰州兰石能源装备工程研究院有限公司,甘肃 兰州 730030)
根据石油钻机自动上下钻具作业要求设计了猫道机自动控制系统,构建了S7-1200 PLC与便携式操作箱和工业监控设定触摸屏之间的网络架构,通过数字液压轴控制器实现了主动作液压阀的精准控制,在此基础上对阿托斯数字液压轴控制器参数设定和猫道机自动运行过程进行阐述,编写了主站PLC与触摸屏的软件程序,同时对监控设定触摸屏画面组态进行说明。通过主站PLC和数字液压轴控制器对现场数据的采集分析处理,实现了钻具快速、平稳、自动上送至司钻台和下放的控制执行功能。
猫道机;PLC和触摸屏;控制系统;S7-1200;数字液压轴控制器
0 引 言
动力猫道机是一种新型的液压专用设备,主要用于石油钻机钻具排放和上下钻台的操作作业,属于钻机外围配套的辅助设备。它主要由主机、液压控制系统、电气控制系统等组成。其中电气控制系统主要包括电机启动装置、PLC控制系统、数字液压轴控制器、安全联锁装置和工业监控设定触摸屏,可实现钻具上下钻台的自动控制。本系统采用工业以太网与现场总线相结合的分布式控制结构,利用主站CPU集成以太网接口连接工业监控设定触摸屏,并扩展PROFIBUS-DP总线接口模块连接便携式控制箱,实现远程遥控。并通过触摸屏输入参数,可实现单动(点动)、半自动(单步动作)、自动(工作周期)三种操作方式,同时具有支撑臂位置、系统压力、运行状态显示,光电安全保护、超温超压报警等功能。
1 主机结构及工作原理
动力猫道机主要由六部分组成,分别为:运移臂、滑车、支撑臂、基座、钻杆排放架、液压站及控制台,各部分之间靠销轴铰接在一起,总体结构如图1所示。
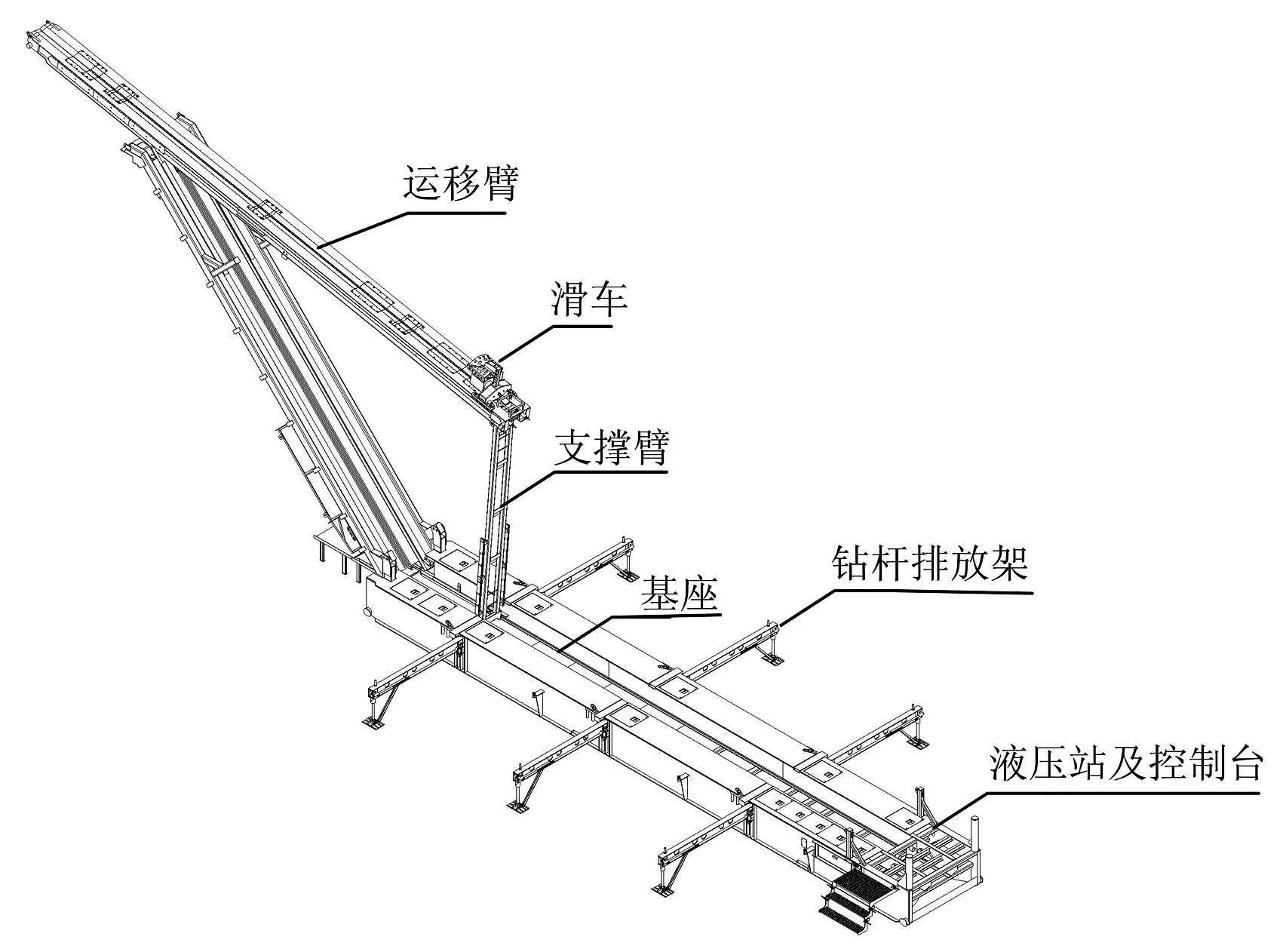
图1 动力猫道机结构图
根据图1所示,动力猫道机实现的动作主要分为上送钻具至司钻平台和从司钻平台下放钻具两种。上送钻具:进料侧钻杆排放架的支腿液压缸伸出将排放架一端升起,钻具在重力作用下,沿排放架的斜面向基座滚动。钻具滚到排放架的限位销处被挡住,此时翻转液压缸伸出,将靠近钻具一端的拨板顶起,从而抬起钻具,钻具抬高到超过限位销后,钻具沿拨板的斜面滚到运移臂的V型槽滑道内。安全销液压缸动作将安全销伸出,主起升马达转动,拉动支撑臂,支撑臂将运移臂举升。当运移臂达到起升限定位置时,滑车液压马达开始工作,驱动链轮转动,带动滑车推动钻具继续前进至井口,从而使吊卡卡住钻具顶部,实现向钻台上运移钻具。然后滑车复位,运移臂下降至基座。下放钻具:下放钻具时,吊卡将钻具底部放入运移臂内,钻具底部与滑车接触后,通过滑车引导钻具进入运移臂的V型槽滑道内,安全销伸出。主起升马达转动,运移臂承载着钻具及滑车一起下放至基座,安全销收回。翻转液压缸开始工作,将钻具推出运移臂的V型槽滑道。最后基座上的出料液压缸工作,将钻具推出猫道机至钻杆排放架上,完成下放钻具并排摆钻具的工作[1]。
2 系统设计方案
根据动力猫道机钻具排放和上下钻台的作业要求,动力猫道机各环节的动作通过液压控制系统执行,液压系统主要包括:(1)主起升液压马达控制系统,(2)滑车液压马达控制系统,(3)左、右翻转液压缸控制系统,(4)左、右支腿液压缸控制系统,(5)左、右侧进料液压缸控制系统,(6)左、右侧出料液压缸控制系统,(7)左、右安全液压缸控制系统、(8)液压站等部件组成,其中液压站为它们提供和分配液压动力[2]。为保证各液压缸同步动作,除安全液压缸外各液压缸配有同步液压马达,以使在同一动作时不同液压缸的伸出/缩回保持同步。液压缸控制系统中的单向阀对液压缸中的油液有阻断保持功能,在相应动作完成或到达指定位置需保持时,其控制电磁阀可以断电,以避免长时间带电工作[3]。另外,在系统突然断电时亦能使液压缸保持在断电之前的状态,避免意外事故发生。液压系统原理简化示意如图2所示。
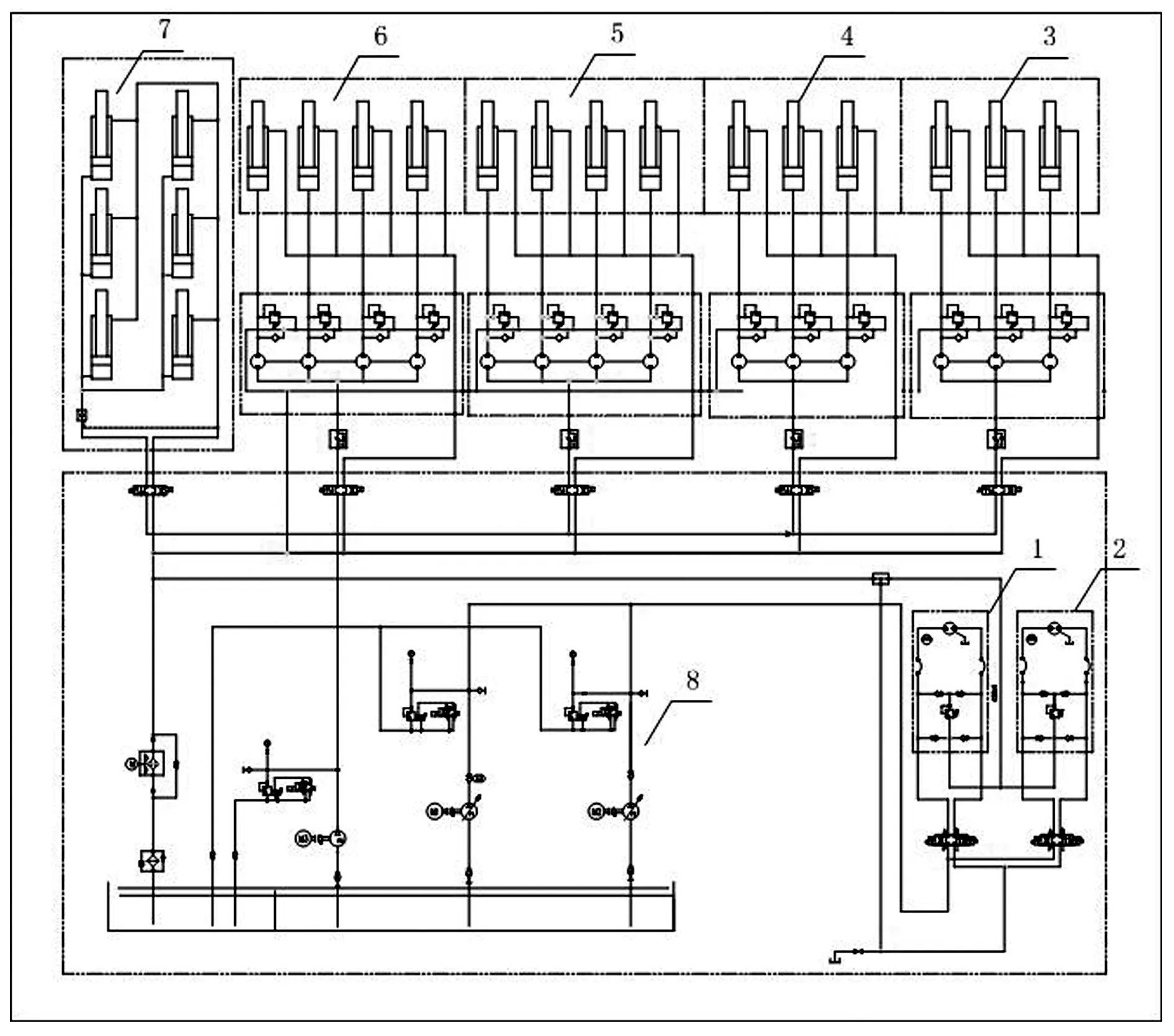
图2 液压系统原理简化图
为实现动力猫道机液压系统的控制功能,本系统选配西门子S7-1200系列PLC,中央处理单元采用CPU1214C,通过以太网接口实现与工业监控设定触摸屏KTP 400 Basic之间的数据通讯;并扩展CM1243-5工业总线接口模块,通过 Profibus-DP总线完成与便携式控制箱之间无线的通讯[4]。为实现动作的平稳和精确控制,主起升和滑车液压马达采用数字控制技术[5],由阿托斯数字液压轴控制器Z-ME-KZ控制,该控制器由PLC的模拟量和开关量设定控制给定值,反馈值由液压马达的旋转编码器直接读入。数字式轴控制器可以对直线或旋转型液压轴进行位置闭环控制,接收来自轴传感器的位置反馈信号,并产生用于调节比例阀到执行器的流量的参考信号[6]。控制系统总体架构如图3所示。

图3 系统架构
猫道机由操作台或便携式控制箱发出指令,液压站控制箱执行并输出给液压站各液压单元。为保证系统供电安全,整个控制系统通过UPS不间断电源供电。
3 系统实现策略
控制系统主站PLC通过采集现场传感器压力、位移、油温、限位开关、按钮开/闭合等信号,利用PLC内部程序进行分析处理,控制液压系统电磁阀得电/失电[7],从而实现主起升液压马达正/反转、滑车液压马达正/反转、左/右侧支腿液压缸伸出/缩回、左/右侧进料液压缸伸出/缩回、左/右侧出料液压缸伸出/缩回、左/右侧翻转液压缸伸出/缩回开关、左/右侧安全销气缸伸出/缩回。通过工业监控设定触摸屏可输入运移臂和车位移、系统油液压力/温度上下限和零位调整范围,工艺设定参数,机械限位有效/无效变更等信息,并显示猫道机及液压系统运行参数。
控制系统共有2台主泵电机,1台油冷机。主泵电机采用西门子3RW30软起动器,可实现间隔顺序软起动和软停止以保护油泵,减小交流感应电机全压起动造成的机械损伤,延长其使用寿命,抑制冲击电流对电网的干扰。
运移臂及滑车马达带有倍加福SSI旋转编码器,其信号接入数字液压轴控制器Z-ME-KZ,通过PLC给Z-ME-KZ控制信号可对主起升及滑车马达的控制阀进行精准闭环控制,使运移臂和滑车实现平稳运行,从而启动、停止冲击小,定位精度高。
状态自检系统可在触摸屏上动态显示工作压力、油液温度、运移臂和滑车位移,同时可显示猫道机工作状态、故障状态、报警状态、电磁阀得电/失电状态,并显示故障原因,方便维修人员检查维修[8];在油箱上装有温度传感器检测油温,系统根据设定温度自动启动换热装置,当超过油温,立即停机。为方便维护人员检修,在其操作权限下,各电磁阀设有强制得电和限位保护取消功能。通过触摸屏可设定运移臂和滑车位移等参数,在设备运行期间能够直接在触摸屏设备上获取相关数据。
当控制系统出现问题或液压执行元件无法停止工作时,按下急停按钮使控制电源断电,以避免安全事故发生,确保人员及设备安全。当系统出现突然停电时,通过SITOP 24V UPS电源使控制系统继续工作,以记录主机所处状态,以便供电恢复后查询及选择其他动作或继续执行停电前动作。
4 软件设计
动力猫道机控制系统软件主要由主站PLC和触摸屏部分组成,主站PLC采用博图STEP7软件编程,触摸屏界面使用博图WINCC软件进行组态。
主站PLC控制程序采用模块化编程结构,在满足猫道机各环节动作的前提下,根据不同的采集和控制过程编制相应的功能和功能块,主要包括控制指令采集与处理、传感器数据采集与处理、电机启/停动作控制、单点动作控制、半自动动作控制、自动动作控制、报警及显示输出等。根据动力猫道机控制系统实现的不同功能,主要将其分为以下功能模块:
FC21:控制指令采集与处理
FC22:电机启/停动作控制
FC23:状态及报警处理
FC24:显示输出
FB31:传感器数据采集与处理
FB41:单动动作控制
FB42:半自动动动作控制
FB43:自动动作控制
其中FC21、FC22、FC23、FC24、FB41由OB1调用执行,FB31由OB31调用执行,FB42由OB32调用执行,FB43由OB33调用执行。这样可根据FB31、FB42、FB43各功能块的不同工作特性,由循环中断组织块OB31、OB32、OB33设置不同的优先级及扫描周期。其程序结构如图4所示。
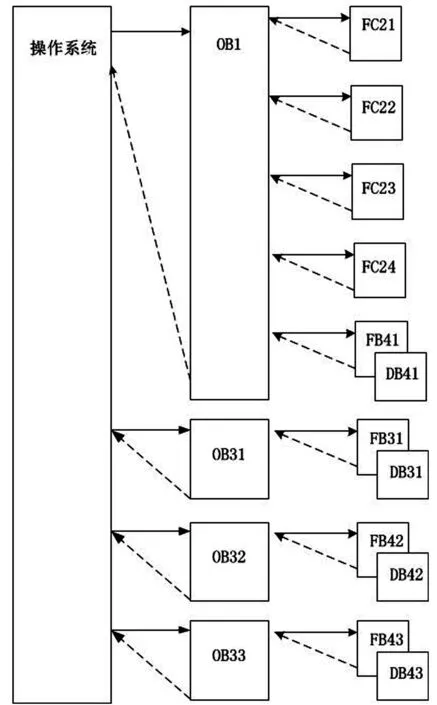
图4 程序结构
下面重点对猫道机上送钻具动作的自动运行程序的设计进行详细说明。首先,由于本系统采用阿托斯数字液压轴控制器Z-ME-KZ对主起升液压马达和滑车液压马达进行定位控制,并接入马达旋转位移编码器的检测信号,定位计算由轴控制器根据编码器反馈信号和PLC控制信号完成,PLC只需给轴控制器提供启/停及目标位置信号。为实现轴控制器精确定位功能,还需对Z-ME-KZ相关参数进行设定,可通过阿托斯Z-SW-PS专业控制调整软件对其进行设定,如:选择定位工作模式、模拟量控制模式、设置启/停控制开关量等。其次,根据猫道机上送钻具的动作工艺要求,将猫道机各动作划分为司钻侧/司钻对侧进料、司钻侧/司钻对侧拨板进料、主起升、滑车上送等工步,由FB43根据步进指令执行。FB43中各动作步序之间互锁,以确保动力猫道机整体动作的连续性和唯一性。各功能和功能块使用SCL语言编写,主要代码如下:
首先,建立一个30个步序的步序循环,并进入第2步序。
CASE DB43.STEP OF
1: CNT:=CNT+1;
IF CNT>30 THEN
CNT:=0;
DB43.STEP:=2;
END_IF;
然后,根据运行条件判断是否进入自动控制步序,并根据操作命令判断是否进入司钻侧(DB43.STEP:=3)或司钻对侧(DB43.STEP:=4)进料步序,如都不是则进入故障步序(DB43.STEP:=10)。
2: IF (MAIN_3=1)AND((AUTO=1) AND(START=1)) THEN
DB1.UP_AUTO_I:=1;
ELSE
DB43.STEP:=15;
END_IF;
IF (DB1.M_AUTO_I=1)AND(DB43. SPACING_POINT=0) AND(DB43. A_SIDE=1)AND(DB43.B_SIDE=0) THEN
A_FEED_VALVE:=1;
SET_0:=1;
DB43.STEP:=3;
ELSIF (DB1.M_AUTO_I=1)AND(DB43. SPACING_POINT=0) AND(DB43. B_SIDE=1)AND(DB43. A_SIDE=0) THEN
B_FEED_VALVE:=1;
SET_1:=1;
DB43.STEP:=4;
ELSE
DB43.STEP:=10;
END_IF;
再后,根据A侧进料限位(A_FEED_SPACING)判断是否进入翻转步序(DB43.STEP:=5),如A侧进料限位20秒内没有信号则进入进料故障步序(DB43.STEP:=11),否则进入故障步序(DB43.STEP:=10)。
3: bcdvalue :=S_ODT (T_NO :=T0 ,
S :=SET_0 ,
TV :=T#20s ,
Q :=Q_0) ;
IF A_FEED_SPACING=1 THEN
A_FEED_VALVE:=0;
A_TURN_VALVE:=1;
SET_0:=0;
SET_1:=1;
DB43.STEP:=5;
ELSIF (A_FEED_SPACING=0)AND(Q_0=1) THEN
A_FEED_VALVE:=0;
SET_0:=0;
DB43.STEP:=11;
ELSE
A_FEED_VALVE:=0;
DB43.STEP:=10;
END_IF;
第四,在翻转动作完成后启动主起升马达并进入主起升步序(DB43.STEP:=7),其代码与进料步序类似,这里不再说明。
在主起升步序中,根据主起升完成信号(UP_MOTOR _ FINISH,由液压轴控制器判断输出)判断是否启动(UP _ MOTOR_START),并将滑车目标位送给滑车马达控制器,进入滑车起升步序(DB43.STEP:=8)。若故障则进入主起升故障步序(DB43.STEP:=13),否则进入故障步序(DB43. STEP:=10)。
7:IF UP_MOTOR_FINISH=1 THEN
UP_MOTOR_START:=0;
PULLEY_MOTOR_POSITION:=PULLEY_UP_POSITION;
PULLEY _MOTOR_START:=1;
DB43.STEP:=8;
ELSIF UP_MOTOR_FAULT=1 THEN
UP_MOTOR_START:=0;
DB43.STEP:=13;
ELSE
DB43.STEP:=10;
END_IF;
最后经过滑车起升步序,即完成了整个上送钻具过程。
猫道机监控设定触摸屏画面使用博图WINCC软件进行组态,其画面分为设备运行状态、参数设置、系统报警和液压系统模拟显示等,画面之间可相互切换,除内部变量外画面中所有变量均与PLC数据块对应,实现猫道机实时运行情况的动态显示。
5 结束语
本文根据上送、下放及排放钻具工艺过程设计猫道机自动控制系统,组建了主站PLC与便携式操作箱远程站和工业监控设定触摸屏之间的网络架构,阐述了整机自动控制系统的实现策略,设计了主站PLC与触摸屏的软件程序,通过使用S7PLCSIM V12完成对整个控制软件的仿真,仿真过程真实模拟现场操作流程对各种开关、显示、控制参数及各种故障状态进行设定,并根据控制要求调整DB块相关参数,经仿真验证,程序各功能块运行准确,能够完成预期的控制功能,可应用于实际工程。
[1] 刘强.石油钻机自动化猫道机的研究与设计[D].大庆:东北石油大学,2013.
[2] 张鹏,于萍,王清岩,等.全液压自动猫道钻杆运移系统设计及仿真分析[J].机床与液压,2014,42(11):142-156.
[3] 左健民.液压与气动技术[M].北京:机械工业出版社,2011.
[4] 朱文杰.S7-1200 PLC编程设计与案例分析[M].北京:机械工业出版社,2011.
[5] 王军政,赵江波,汪首坤.电液伺服技术的发展与展望[J].液压与气动,2014,38(5):1-12.
[6] 袁子荣.新型液压元件及系统集成技术[M].北京:机械工业出版社,2012.
[7] 赵丁选,巩明德,张志文,等. 信息化对工程机械传动技术的影响[J].液压与气动,2013,37(9):1-9.
[8] 崔学政,刘平全,肖文生,等.海洋钻井平台自动化猫道机设计[J].石油矿场机械,2011,40(2):20-23.
Design and Realization of S7-1200-based Fully Hydraulic Catwalk Machine Control System
Wang Yuxian, Wang Yuanzhong, Lu Guangrong, Xia Lichao
(Lanzhou Lanshi Engineering Research Institute of Energy Equipment Co. Ltd., Lanzhou Gansu 730030, China)
Based on the operational requirements on automatically loaded/unloaded drilling tools of oil rigs, this paper constructs a network architecture between S7-1200 PLC, a portable operation box and a touch screen for industrial monitoring setup, and through a digital hydraulic axis controller implements precious control of the main action hydraulic valve. Furthermore, it expounds parameter setting of Atos digital hydraulic axis controller and the process of automatic operation of the catwalk machine, compiles software program for main station PLC and touch screen, and explains the image configuration of the surveillance setting touch screen. Through acquisition, analysis and processing of field data by the main station PLC and digital hydraulic axis controller, we realize control function of fast, stable, automatic feeding of drilling tools to the driller’s station as well as their load-off.
catwalk machine; PLC and touch screen; control systems;S7-1200;digital hydraulic axis controller
10.3969/j.issn.1000-3886.2017.02.033
TP273
A
1000-3886(2017)02-0106-04
王宇翔(1983- ),男,甘肃兰州人,工程硕士,工程师,研究方向为设备运动过程自控控制。
定稿日期: 2016-09-14
猜你喜欢
西南石油大学学报(自然科学版)(2021年3期)2021-07-16
矿产勘查(2020年5期)2020-12-25
智慧少年·故事叮当(2020年6期)2020-06-21
建筑机械化(2020年1期)2020-03-19
石油地质与工程(2019年3期)2019-09-10
车迷(2018年11期)2018-08-30
江西建材(2018年2期)2018-04-14
建材与装饰(2018年7期)2018-03-15
凿岩机械气动工具(2016年1期)2016-11-11
化工设计通讯(2016年7期)2016-03-12
