
基于压电陶瓷与柔性机构的高速机床主轴预紧控制机构设计
2017-04-19 05:21齐向阳王鹤宇
邵阳学院学报(自然科学版) 2017年1期
齐向阳,王鹤宇
(天津工业大学 机械工程学院,天津,300387)
基于压电陶瓷与柔性机构的高速机床主轴预紧控制机构设计
齐向阳,王鹤宇
(天津工业大学 机械工程学院,天津,300387)
采用角接触轴承的机床高速主轴在转速上升过程中由于摩擦发热而使主轴温度不断上升,从而限制了机床转速范围的提高以及主轴的稳定性。预紧力的大小对机床主轴单元的工作温度有重要的影响,传统的预紧方式已不能满足高速化主轴的工作温度需要。本文选取7012C轴承为研究对象,在分析其不同转速下的最佳预紧力与轴向位移的基础上,设计一种新型预紧机构,以叠层压电陶瓷为驱动源,柔性机构为驱动机构。经仿真计算证明该预紧机构可行,其预紧机构的输出力与输出位移均可满足要求。
压电陶瓷;柔性机构;主轴预紧机构;自调节
主轴作为机床的核心部件,其性能好坏直接关系到机床能否进行有效的工作。主轴的预紧技术是主轴研究领域的重要方向之一,主轴的预紧力能随着主轴工作情况的改变而实时调整以保持一个最佳的工作状态,是其研究领域的一个关键目标。因此确定主轴的最佳预紧力并通过自适应调节系统使其保持这种状态,是高速高精度机床在全工况范围内动力学特性保持最优的前提。目前应用较为普遍的方式为液压预紧[1],随着研究的不断深入与发展,压电陶瓷驱动的微/纳定位系统已经在可调预紧技术领域得到广泛研究,其主要应用方式为将压电陶瓷直接作用于轴承外圈[2-3],它具有分辨率高、响应速度快、无摩擦和无发热问题等优点,但是压电陶瓷的驱动行程较短、易碎,内置不利于更换;且在高速运转时,机床的振幅也是相当高的这样对于只能承受轴向力的压电陶瓷来说是非常不利的[4]。因此,如何在主轴预紧工业化程度上来发挥压电陶瓷的优势而避其短处,将是一个亟待解决的关键问题。
因此,本课题在此基础上设计一种新型预紧机构,以压电陶瓷作为驱动源,柔性机构作为微位移放大机构,组成复合型输出。将柔性机构直接作用于轴承外圈,将作为驱动源的压电陶瓷放置其外,这样既实现功能,又能不破坏压电陶瓷驱动器,同时也利于日后的维修与更换。利用此方法能实现对主轴轴承预紧力的实时控制。
1 主轴轴承摩擦热特性分析
1.1 轴承摩擦热计算
轴承在运转时产生的热量与很多因素有关,其中主要因素有:轴承预紧力、主轴转速、润滑剂类型及其流变特性,轴承安装布局以及工作温度等。在这些因素中最主要的是主轴转速与轴承预紧力对轴承温升的影响。当主轴处于高速运转时,过大的预紧力会使轴承温度超标,长时间情况下会使轴承发生形变,从而影响主轴的使用性能。因此在预紧力许可的范围内,尽量减小高速段轴承预紧力,是高速段轴承预紧力分析计算的理论依据。轴承的滚动体与内外圈滚道之间的滚动阻力、摩擦损耗,以及自旋运动是轴承的主要发热源。轴承的发热量主要是由轴承的摩擦力矩所引起的,力矩越大,轴承产生的摩擦热就越多, 滚动体与内外圈接触区域的发热量与接触区域的摩擦力矩和主轴转速有关,其发热量可由式(1-1)得[5]:
(1-1)
式中:Hij、Hej—各滚珠与内外圈接触区的发热量,W;
Mij、Mgj—摩擦力矩内外圈分量,N.mm;
Mbi、Mbg—内外圈自旋摩擦分量,N.mm;
Wroll—滚珠相对内外圈滚道的滚动角速度,rad/s,且wroll=wmdm/Dw;
wbi、wbg—滚珠绕内外圈滚道接触面法线自旋角速度,rad/s。
1.2 轴承热传递分析
本文选取7012C轴承为研究对象,根据轴承内部传热规律[6-7]以及公式(1-1)计算,得到该轴承预紧力、转速与滚动体温度之间的关系曲线如图1所示。从图中可以看出在2000r/min转速下,预紧力由200N提高到2000N,轴承的滚动体温度没有发生明显的变化,基本在27℃左右;随着主轴转速的提高,轴承的滚动体温度逐渐发生变化,开始明显上升;在极限转速7500r/min情况下,预紧力由200N提高到2000N,滚动体温度由60.13℃上升到88.97℃,温度涨幅为47.96%。

图1 预紧力、转速与轴承温度关系曲线Fig.1 Pre tightening force,rotational speed and bearing temperature curve
1.2 轴承可调预紧与轴向变位特性分析
由上文分析可知,如果主轴轴承预紧力可以随着主轴转速的变化而发生相应的改变以满足主轴工作需求,这样不仅能够获得高品质的动力学性能,而且能大幅降低轴承在高速段的工作温度。选取7012C轴承为研究对象,根据实际工作情况需要选取轴承轻预紧力F的经验公式[8-9]:F=k1*k2*c,式中,k1为轴承系列系数,7000系列轴承k1取值为0.009,7200系列轴承k1取值为0.01;k2为轴承接触角系数,α=15°的取值为1,α=25°的取值为1.5;C为额定动载荷(N)。7012C的初始接触角为15°,额定动载荷为35000N,由上式可计算出轻预紧力F=315N,由主轴可调预紧最佳预紧力选取方式,按轻、中、重三个等级预紧力比值为1∶2∶4[10]可得到相对的中预紧力与重预紧力分别为630N、1260N。三个预紧力等级分别对应主轴的高、中、低速度段三个等级预紧力。再根据上文图1预紧力、转速与轴承温度关系曲线可对各转速段主轴预紧力进行初步估算,根据估算值经拟合可得到主轴转速与预紧力的对应曲线图,如图2所示。
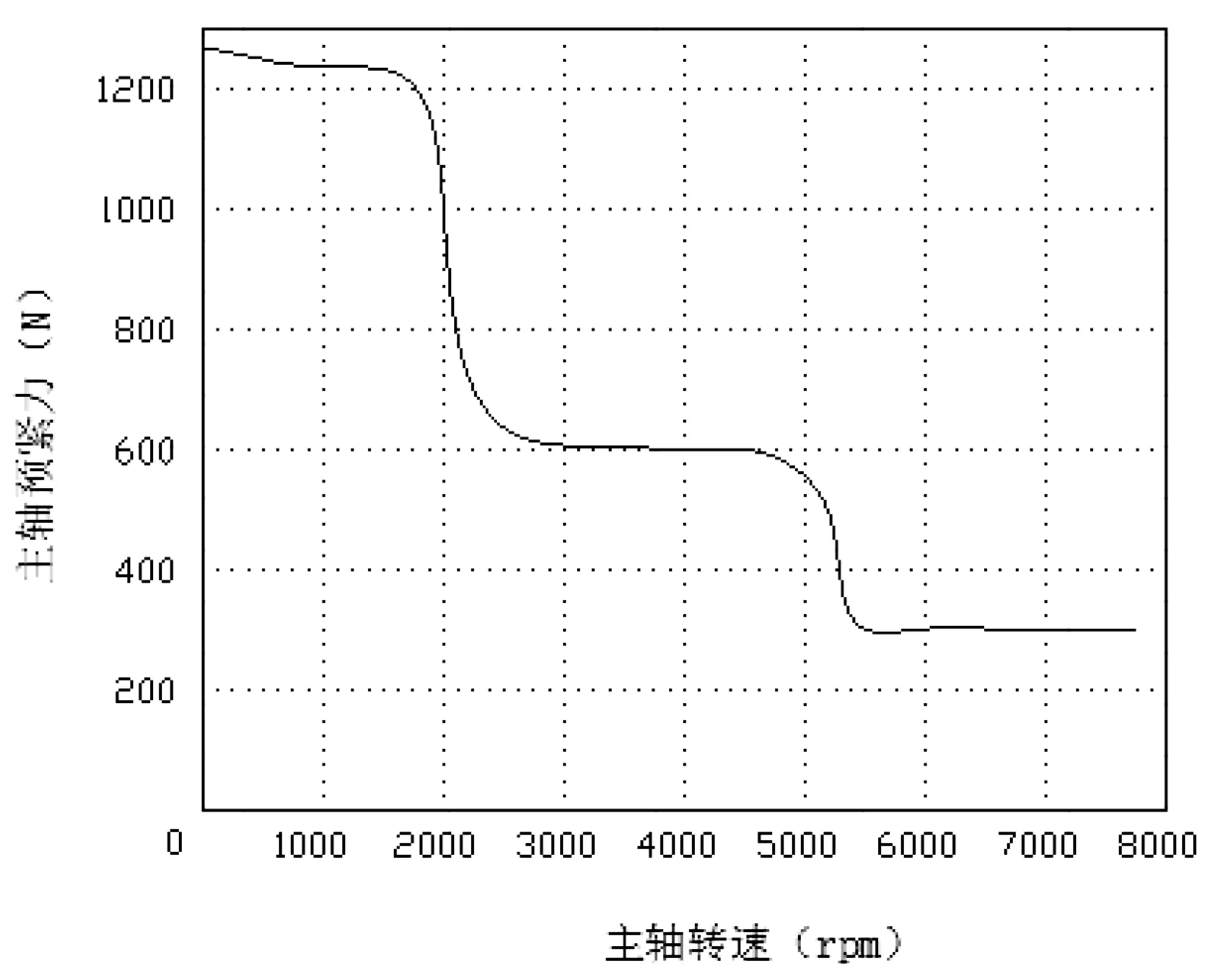
图2 主轴转速与可调预紧力关系曲线图Fig.2 Relationship curve of spindle speed and adjustable preload


图3 主轴转速与轴向变位关系Fig.3 Relationship between spindle speed and axial displacement
图4表示为在可调预紧与传统预紧下主轴轴承滚动体温度随转速变化的曲线,从图中可以看出采用定压预紧时,轴承滚动体的温度随着转速的增大而升高,并且转速越高,温度增幅越大;当采用可调预紧时,在转速较低时,滚动体的温度与定压预紧相比变化不太显著,而当主轴达到高速转时,可调预紧明显的降低了轴承滚动体的温度,转速越高越明显,使轴承在高速段处于一个合理的温度范围内工作,最大温度降幅约为31.6%,满足了主轴在高速运转时降低温升的要求,使轴承性能更加稳定,从而保证了主轴的精度。

图4 不同预紧方式下轴承温度随转速变化关系Fig.4 Change of bearing temperature with rotational speed under different preload
根据上文对主轴运动特性的分析可知,采用可调预紧可明显轴承在高速段运转时的温度,提高主轴高速段运行稳定性。所得到的可调预紧力与相对应的轴向变位数值将作为设计可调预紧机构的理论数据。
2 基于压电陶瓷与柔性机构特性的预紧力自调节系统
2.1 预紧机构原理分析
根据上述分析可知,相比于传统预紧方式,采用可调预紧可明显降低轴承在高速段的工作温度。采用何种预紧机构来实现对主轴预紧的可调,将是我们需要解决的主要问题。本课题提出将压电陶瓷与柔性机构机构结合使用,设计出图5所示的新型主轴预紧自调机构。

图5 主轴预紧可调机构Fig.5 Spindle preload adjustable mechanism
其工作原理为:压电陶瓷作为驱动源放置于输入端一侧,柔性机构作为驱动机构通过柔性铰链与轴承套筒采用过盈配合方式固定在轴承套筒上,其余预紧系统通过输入杆两侧的柔性铰链以圆弧形式固定在轴承套筒四周,如图6所示。
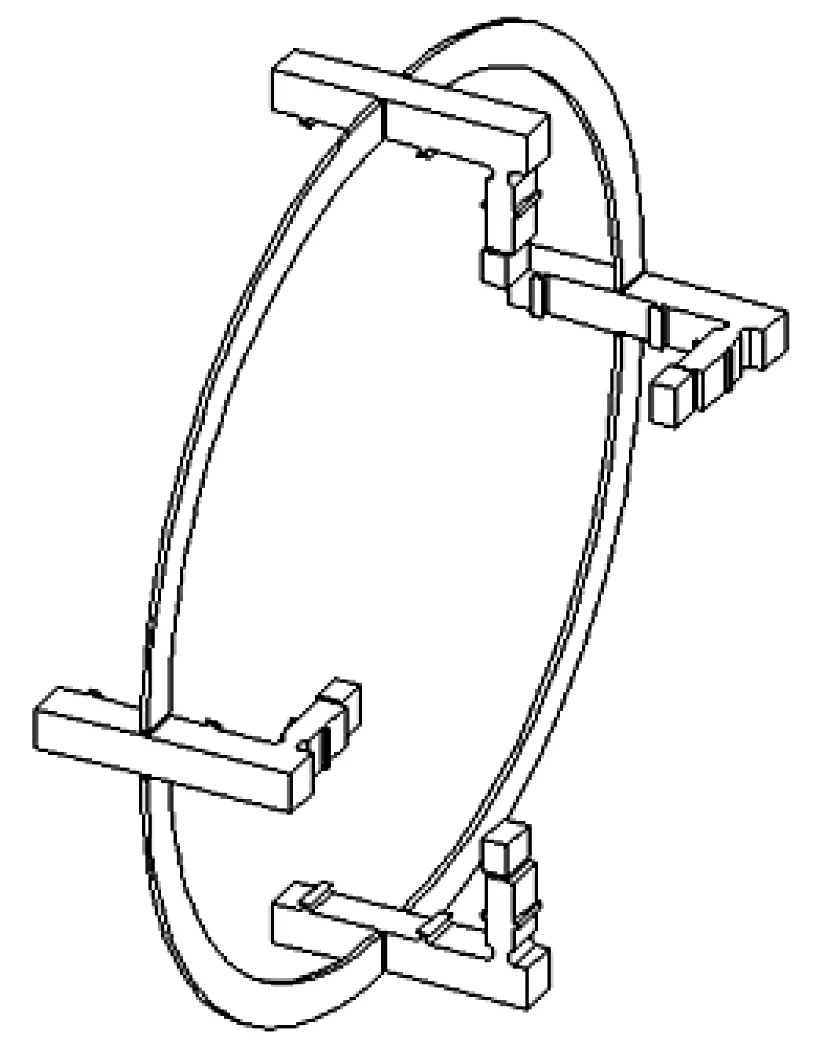
图6 主轴预紧可调机构装配图Fig.6 Spindle preload adjustable mechanism
当主轴系统需要增大/减小预紧力时,调节电压使压电陶瓷相应的伸长/收缩,产生输入位移与驱动力。输入位移与驱动力在柔性铰链的作用下,通过输入杆经柔性铰链传递给连接杆。在连接杆在柔性铰链的作用下,经过柔性铰链将输入位移传递给输出杆。最终,输出杆左端输出位移与预紧力作用于轴承外圈,对轴承实施预紧。
2.2 叠层压电陶瓷性能分析
叠层压电陶瓷是一种机械能与电能相互转化的功能材料,利用此性能在应用中既可做传感器件,又可以作为驱动器件[12]。结合最佳预紧力以及轴向位移需要,选取国产型号dtkj10*10*18@150的叠层压电陶瓷作为该预紧机构驱动器,其特性曲线如图7所示。从图中可以看出,电压在上升过程中对叠层压电陶瓷产生的输出位移与电压在下降过程中所产生的输出位移是不同的,这是因为压电陶瓷具有滞环性[12],这是压电陶瓷的固有特性,此特性存在于开环控制中,采用闭环控制回路,利用反馈与伺服的作用可以降低压电陶瓷的迟滞特性[13-15]。

图7 输入电压与输出位移曲线图Fig.7 The input voltage and output displacement curve
3 柔性机构性能分析
图8为该柔性机构运动原理图。当叠层压电陶瓷驱动源在输入端输入驱动力与驱动位移时,输入杆L1在柔性铰链R1、R2的作用下发生轻微转动,转动角度为α;柔性铰链R1、R2在输入力的作用下产生弹性力,并发生轴向位移。
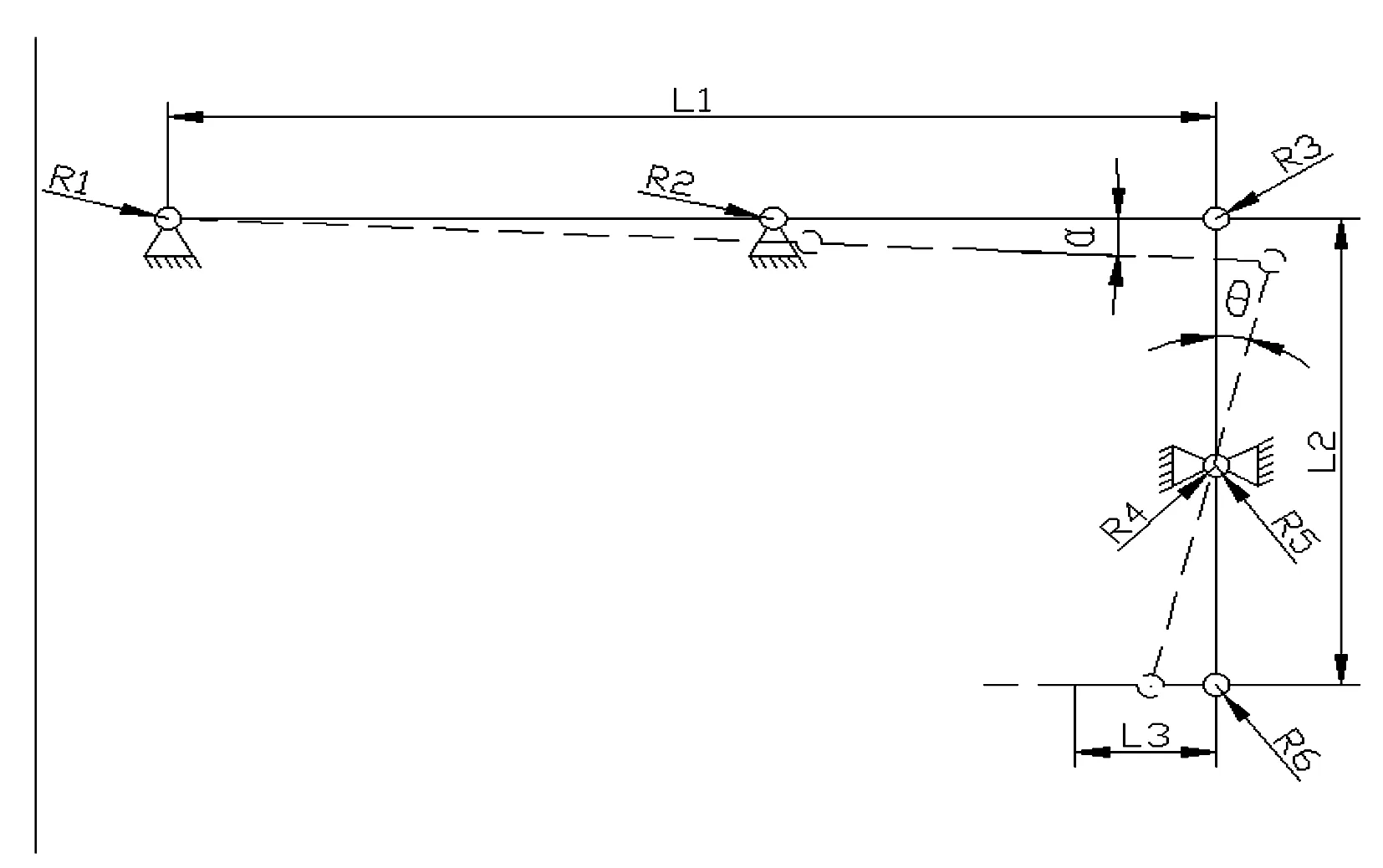
图8 柔性机构运动原理图Fig.8 Kinematic principle of flexible mechanism
此时连杆L1的输出端与输入端的力、位移关系可如下表示:
(3-1)
式中:F1输出δ1输出—输入L1输出端的输出力,N、输出位移,mm;
k-柔性铰链弹性系数;
x1、x2-柔性铰链R1、R2的弹性变化量,mm;
F输入、δ输入-叠层压电陶瓷驱动源的输入力,N、输入位移,mm。
连杆L2与柔性铰链R4、R5可看成杠杆机构,根据杠杆原理,输出杆L3处的输出力、输出位移与L2输入端的输入力、输出位移关系可如下表示:
(3-2)
式中:F3输出、δ3输出—输出杆L3输出端的输出力,N、输出位移,mm;
λ-输出力的缩小倍数,取λ=LR3R4R5∶LR4R5R6=1∶3;
λ′-输出位移的放大倍数,取λ′= LR4R5R6∶LR3R4R5=3∶1;
这里值得注意的是,为了弥补叠层压电陶瓷驱动器输出位移量偏小的缺点,杠杆机构应以放大位移量为设计初衷,但同时输出的驱动力会相应的减小。考虑到所选的叠层压电陶瓷驱动器的输出值以及轴承所需的预紧值,在这里将LR3R4R5与LR4R5R6的比值设定为1∶3。
F2输入、δ2输入-连杆L2的输入力、输入位移,其值为L1输出端的输出力、输出位移。
将式(3-1)与式(3-2)合并,可得到叠层压电陶瓷输入力、输入位移与柔性机构输出端的输出力、输出位移之间的关系式:
(3-3)
根据上述分析以及实际工作情况,确定柔性机构尺寸为:L1=100mm,L2=50mm,L3=20mm,柔性铰链尺寸表1所示:

表1 柔性铰链尺寸Table 1 Flexible hinge size
根据公式(3-3)可算出输入力、输入位移与预紧机构输出力、输出位移的对应值,如表2所示。
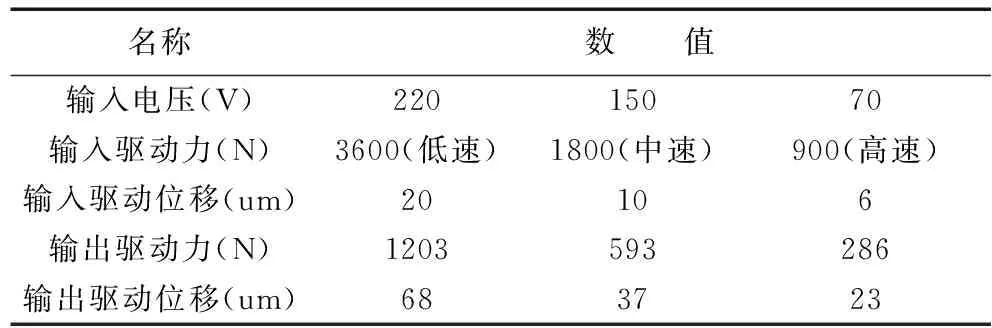
表2 输入值与输出值对比表Table 2 The input value and output value contrast table
根据上述数值并进行曲线拟合可得到叠层压电陶瓷驱动器输入电压与预紧机构输出预紧力以及位移的关系曲线图,如图9、10所示。从图中可以看出,叠层压电陶瓷的输出力经柔性机构传递,输出力可满足最佳预紧力需求;其输出位移经柔性机构大后,最大输出位移由20um变为65um左右,放大倍数3倍左右,可满足主轴最大预紧力所对应的输出位移。

图9 驱动源输出电压与柔性机构输出力曲线图Fig.9 Output force curve of driving source output voltage and preload mechanism
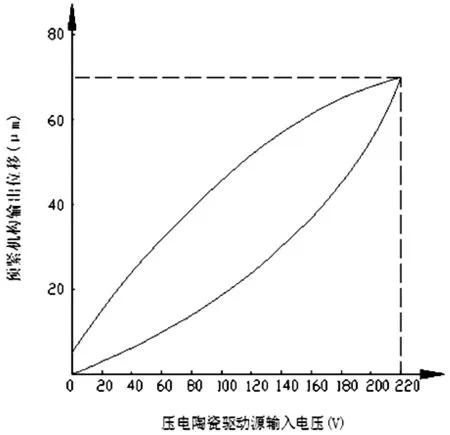
图10 压电陶瓷驱动源输入电压与柔性机构输出位移曲线图Fig.10 Input voltage of piezoelectric ceramic driving source and output displacement curve of flexible mechanism
4 预紧力可调机构性能分析
图11、12分别为该预紧可调机构在不同转速区间段所输出的预紧力以及轴向变位与上文分析所得到的可调预紧力以及轴向变位的对比曲线图。从图中可以看出,该预紧机构的输出预紧力以及输出位移与上文分析所得到的最佳预紧力、轴向位移的数值以及变化规律基本吻合。图13为该可调预紧机构对滚动体温度控制的曲线图,从图中可以看出该预紧机构在主轴高速段区域可对轴承的滚动体温度进行有效调节,使其稳定在一个合理的变化范围内。
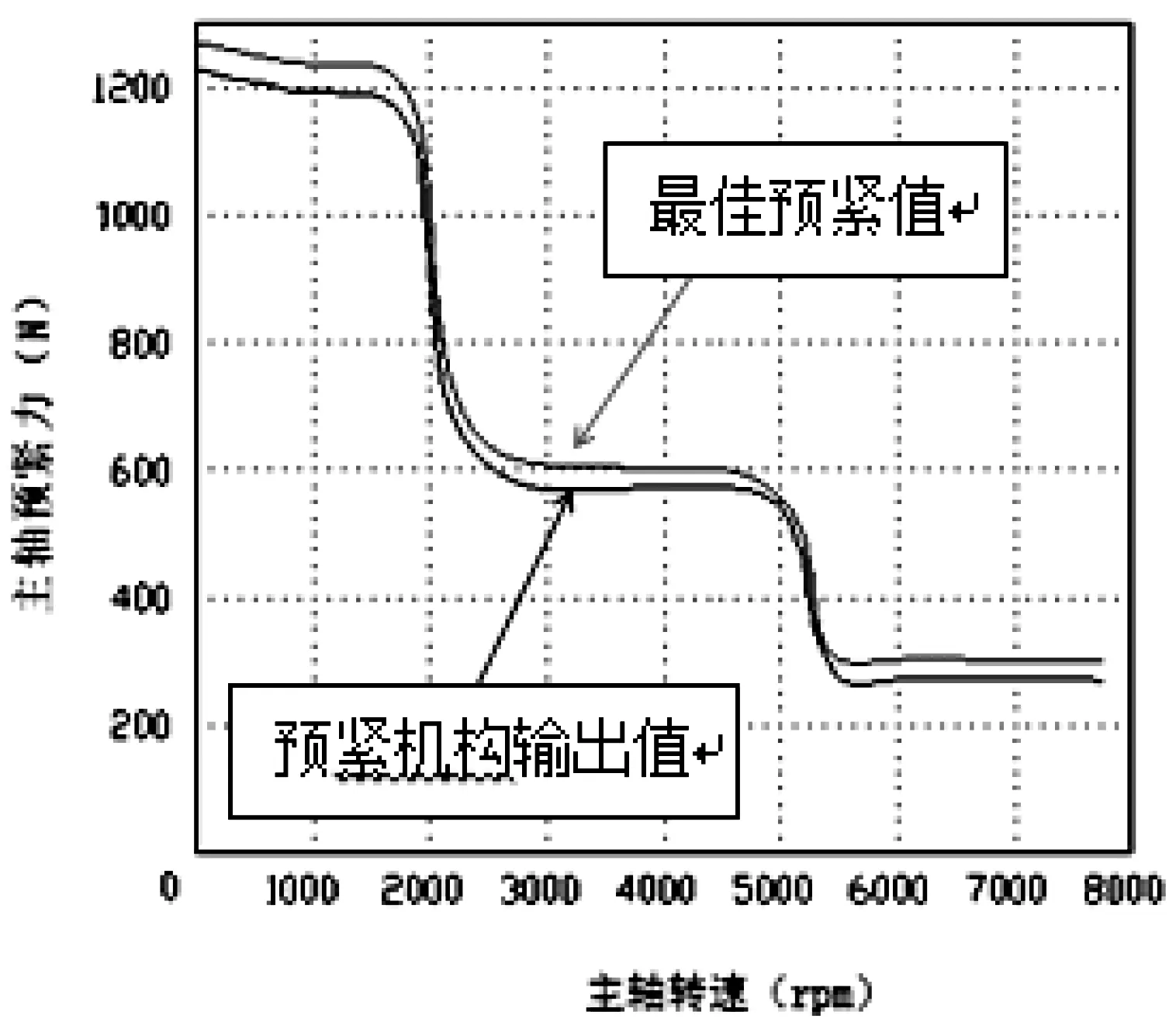
图11 预紧力对比曲线图Fig.11 Pre tightening force contrast curve

图12 轴向变位对比曲线图Fig.12 Axial displacement contrast curve

图13 可调预紧机构对轴承滚动体温度影响Fig.13 Effect of adjustable preload mechanism on rolling temperature of bearing
5 结论
选取7012C轴承为研究对象,采用经验公式与仿真分析,给出了主轴预紧力与轴承转速、轴承温度之间关系。以轴承温度为控制目标,结合主轴最佳预紧力经验公式,确定各转速段相对应的预紧力以及轴向位移,进而运用仿真分析获得了可调预紧与传统预紧对轴承温度影响的对比。
在此基础上,以上述所得的预紧力与相对应的轴向变位作为理论依据,设计一种实现预紧力可调的预紧机构。以叠层压电陶瓷为驱动源,柔性机构为驱动机构。经理论计算与仿真分析证明该机构可行,可以达到所推荐的预紧力以及轴向变位数值,进而对轴承温度进行控制,使其保持在一个合理的变化范围之内。
[1]熊万里,李芳芳,纪宗辉,等.滚动轴承电主轴系统动力学研究综述[J].制造技术与机床,2010,(3):25-31.
[2]Jenq-Shyong Chen,Kwan-Wen Chen.Bearing load analysis and control of a motorized high speed spindle[J].International Journal of Machine Tools & Manufacture,2005,45(12-13):1487-1493.
[3]麻玉川.基于压电陶瓷高速电主轴振动主动控制研究[D].重庆:重庆大学,2012.
[4]郑凯,阎绍泽,温诗铸.压电叠层作动器机电性能实验分析[J].压电与声光,2006,28(3):373-376.
[5]Jiang S,Mao H.Investigation of variable optimum preload for a machine tool spindle[J].International Journal of Machine Tools and Manufacture,2010,50(1):19-28.
[6]Takabi J,Khonsari M M.Experimental testing and thermal analysis of ball bearings[J].Tribology international,2013,60:93-103.
[7]Wang X,Guo Y,Chen T.Measurement research of motorized spindle dynamic stiffness under high speed rotating[J].Shock and Vibration,2015,Article ID 284126.
[8]Hu T,Yin G,Sun M.Model Based Research of Dynamic Performance of Shaft-Bearing System in High-Speed Field[J].Shock and Vibration,2014,Article ID 478270.
[9]何存兴,张铁华.液压传动与气压传动[M].武汉:华中科技大学出版社,2000.
[10]陈洁清,王艳春.电主轴系统最佳预紧力研究[J].机电工程技术,2007,(7):20-21.
[11]蒋兴奇,马家驹,范谷耕.高速精密角接触球轴承最小预紧载荷计算[J].轴承,2001,(6):61-63.
[12]崔新辉.柔性微传动机构的构型设计与分析研究[D].重庆:重庆大学,2012.
[13]刘泊,郭建英,孙永全.压电陶瓷微位移驱动器建模与控制[J].光学精密工程,2013,21(6):1503.
[14]郑凯,阎绍泽,温诗铸.压电叠层作动器机电性能实验分析[J].压电与声光,2006,28(3):373-376.
[15]李朋志,葛川,苏志德,等.基于动态模糊系统模型的压电陶瓷驱动器控制[J].光学精密工程,2013,21(2):394-399.
Design of high speed machine tool spindle preload control mechanism based on piezoelectric ceramics and flexible mechanism
QI Xiangyang,WANG Heyu
(School of Mechanical Engineering,Tianjin Polytechnic University,Tianjin 300387,China)
In this paper,high speed spindle of the machine tool using angular contact bearings in the process of speed rise due to friction and heat caused by the spindle temperature rising is adopted,which thus limiting the speed range of the machine and the stability of the spindle.The size of the pre tightening force has an important influence on the operating temperature of the spindle unit of the machine tool.The traditional pre tightening method can not meet the need of high speed spindle.In this paper,the 7012C bearing is selected as the research object.Based on the analysis of the optimal preload and axial displacement at different speeds,a new type of pre tightening mechanism is designed,with laminated piezoelectric ceramic as the driving source and flexible mechanism for driving mechanism.The simulation results show that the proposed mechanism is feasible.The output force and output displacement of the pre tightening mechanism can meet the requirements.
piezoelectric ceramic;flexible mechanism;spindle preload mechanism;self adjustment
1672-7010(2017)01-0100-08
2017-01-18
天津市高等学校科技发展基金(20130402)
齐向阳(1974-),男,天津人,副教授,博士,硕士生导师,从事主轴预紧与热动特性技术研究通信作者:王鹤宇,男,江苏省扬州人,工学硕士,从事机械工程研究,E-mail:375961102@qq.com
TN249 < class="emphasis_bold">文献标志码:A
A
猜你喜欢
装备制造技术(2020年2期)2020-12-14
建材发展导向(2019年13期)2019-08-24
民用飞机设计与研究(2019年2期)2019-08-05
压电与声光(2019年1期)2019-02-22
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
铜仁学院学报(2018年6期)2018-07-05
CHIP新电脑(2014年5期)2014-05-14
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
