
基于STM32单片机的数字直流调速系统的设计
2017-04-19 05:21李辉石书琪窦乐邱雄迩刘新波
邵阳学院学报(自然科学版) 2017年1期
李辉,石书琪,窦乐,邱雄迩,刘新波
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,422000)
基于STM32单片机的数字直流调速系统的设计
李辉,石书琪,窦乐,邱雄迩,刘新波
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,422000)
本文介绍了一种基于STM32F103的全数字直流调速系统。首先分析了直流调速系统的控制原理,然后利用STM32F103单片机产生PWM控制信号,并在软件中应用增量式PID的速度闭环来完成直流电机的调速控制方案。文中着重分析了电机的控制模块、检测电路、驱动电路等硬件电路构成及相应的软件编程设计,最后搭建了小功率直流电机直流调速实验系统。实验及结果分析表明:该方案具有性价比高、可靠性好、精度高的优点,并验证了设计方案的可行性和合理性。
STM32F103VET6;PID;脉宽调制;直流调速
直流电机具有良好的启动、制动性能,其控制系统又具有非常好的速度调节及控制功能,最重要的是能够在较宽的范围内实现平滑调速,故而在轧钢机、卷扬机、挖掘机、钻探机、高层电梯、机器人等需要高性能控制的电气传送与机械动力领域中得到了广泛的应用[1-3]。
随着新型的电力电子功率器件的出现及计算机技术在控制领域应用的普及,使得由全控型器件组成的基于带PWM功能单片机的全数字直流调速系统成为主流[4-5]。本文正是基于带PWM功能的STM32控制器,通过软件编程的方法改变H桥的导通时间,从而改变脉冲宽度来实现直流电机的数字调速目的。
1 工作原理
直流电动机转速n的数学表达式为:
(1)
式中:U—电枢电压;
n—电机转动速度;
la—电枢电流;
Φ—励磁磁通;
Rε—电枢电路总电阻;
Ce—电动机的电动势常数。
可知直流电机转速的调节控制方法有三种[6]:调节电枢电压、改变电机励磁磁通、改变电枢回路电阻。目前,直流调速控制系统大多采用在额定电压范围内改变电枢电压的方法,使得电机的额定转速下降。通过改变电动机的电枢电压接通时间和通电周期的比值,这就是常见的脉冲宽度调制技术(PWM技术),其具体实施过程如图1所示:当给定的驱动信号使开关管VT1和VT4导通,同时使开关管VT2和VT3关断,此时,Ud=Ua(额定输入电压);反之,则Ud=-Ua;当改变两组开关管器件(VT1和VT4为一组,VT2和VT3为另一组)交替导通时间,即可改变电压脉冲的宽度,从而改变Ud的平均值(电枢两端的电压),进而改变直流电机M的转速n,也可进一步改变直流电机的转向,图1中VD1、VD2、VD3、VD4为续流二极管。
在PWM技术具体实施过程中,给定的驱动信号,即图1中所示的矩形脉冲信号,可通过定宽调频法、调宽调频法、定频调频法等几种方法来获取,前面两种方法都是通过改变周期来实现控制的目的,当调节的频率接近于直流电机的固有频率时,电机易发生震荡[7]。鉴于此,在PWM技术实现过程中宜采用定频调宽法。

图1 H桥电路框图Fig.1 Circuit diagram for H-bridge
2 系统结构设计
数字直流调速系统主要包括STM32单片机、键盘操作、LCD显示、转速检测与调理等部分。硬件结构框图如图2所示。
本设计采用STM32单片机作为智能控制器,通过按键进行电机转速的设定及LCD显示屏实时显示转速反馈值,通过中断捕获得到电机的实际转速并与设定值进行比较,根据偏差与变化的情况控制速度调节器ASR,速度调节器的输出控制单片机产生PWM波形,PWM波占空比的改变,使得直流电机两端的平均电压可调,从而实现直流电机的闭环调速。

图2 数字直流调速系统框图Fig.2 Block diagram of digital DC speedregulating system
2.1 STM32F103单片机简介
STM32F103[8]是意法半导体公司推出的基于ARM7架构下Cortex-M3内核的中等容量、增强型、低功耗、高性价比的一款32位单片机,其最高工作频率可达到72MHz,具有64K字节的FLASH以及20K字节的SRAM,拥有非常丰富的片上资源,如两个12位逐次逼近型的ADC,多达七个Timer、两个I2C、两个SPI、三个USART等外设配置,堪称功能强大,集众多外设于一身,可以从容满足设计者的多样需求。
2.2 速度检测
为了实现在较宽的调速范围内对直流调速系统速度进行有效、较精密的闭环控制,在系统中设置了转速调节器,即将转速实际值与给定值进行比较,而实际值的获取,离不开速度检测方法及相应的传感器。在本设计中应用了数字的M/T法、旋转编码盘对直流电机进行转速检测。
目前,数字式转速检测方法主要有三种[9]:频率法(M法)、周期法(T法)、频率周期法(M/T法)。通过查阅资料,分析对比可发现:M/T法检测速度能够保证电机在高速运行时还是在低速运行即在较宽的转速范围内,都具有较好的分辨率,能达到较高的测速精度。既能检测Tc时间内旋转编码器输出的脉冲个数M1,又能检测在同一时间间隔内的高频时钟脉冲个数M2,其直流电机转速为:
(2)
2.3 电机驱动
本设计中的实验电机为日本MITSUMIM25N-2R14 2241型自带光电旋转编码器的334线AB相直流微电机,该电机供电电压在3-30V内可调、六线引出、334线编码盘等特点。基于此,选用SGS公司的双H桥电机驱动模块L298N作为电机驱动模块,即可驱动两个2相电机,也可驱动一个四相电机,其驱动电压范围为5-35V,最大功率为25W。
3 系统软件设计
系统软件部分主要由主程序、转速设定程序、LCD显示程序等功能模块程序及数字PID控制算法程序、PWM生成程序等中断服务子程序组成。
3.1 主程序设计
主程序完成直流电机调速系统的初始化、单片机的发生中断类型以及定时器的组合及相应变量的定义。在主程序中,首先完成对单片机内部的事件管理器和寄存器的初始化,而后进行转速设定、转速检测、数字PID控制算法软件实现、PWM生成,最终在LCD显示屏上显示转速设定值、当前实际转速、占空比等参数,其主程序流程图如图3所示。
3.2 生成PWM波形寄存器配置方法
STM32具有多个定时器,但除了TIM6和TIM7之外,其他的定时器都可以用来产生PWM输出。在本设计中,选用STM32F103单片机系统的TIM1的CH1产生一路PWM输出。
配置步骤[9-10]为:(1)开启TIM1时钟,配置PA8为复用输出功能;(2)设置TIM1的ARR和PSC,设定输出的PWM波形的频率为400Hz;(3)设置TIM1_CH1的PWM模式及通道方向,达到设定引脚为输出;(4)使能TIM1的CH1输出,使能TIM1,达到PWM波形的输出;(5)设置MOE输出,使能PWM输出;(6)修改TIM1_CCR1来控制占空比。

图3 主程序流程图Fig.3 Main program flowchart
4 实验及结果分析
电机选择的是日本MITSUMIM25N-2R14 2241型334线AB相编码电机(自带光电旋转编码盘,且电机每转一圈输出达到334个脉冲),单片机选择的是STM32F103VET6,电机驱动选择的是L298N。实验系统装置如图4所示,其电机自带光电旋转编码盘,而编码脉冲经过内部信号调理后可直接与单片机引脚相连,即把编码器的A相线直接到单片机的PA0引脚,并通过程序设定为上升沿中断,即每检测到一次由低电平到高电平的时候,就计数一次。两根电机电源线分别接到电机驱动模块L298N上的OUT1、OUT2两端。电机驱动模块L298N上的INN1引脚接到STM32F103VET6的PA8引脚,即为PWM脉冲输出引脚。
本设计中的电机为微小型电机,采取直接起动方式,在实验时没有专门设置启动电路,故在程序初始化阶段,设定初始占空比为30%,如表1所示的第Ⅰ次实验,当启动系统后,可以从LCD屏读出当前实际转速为13r/s,占空比为30%。通过键盘设定目标值为18r/s时,系统稳定后,可以从LCD屏读出当前实际转速为18r/s,占空比为42%,如表1所示的第Ⅱ次实验。以后的实验均是在前一次的基础上设定不同的目标转速,如表1所示,当把电机转速设定为32r/s,PWM波的占空比不断调节,系统稳定以后使电机的转速达到给定值32r/s,此时实际转速为32r/s,占空比为76%,如表1所示的第Ⅴ次实验,实验结果如图所示。
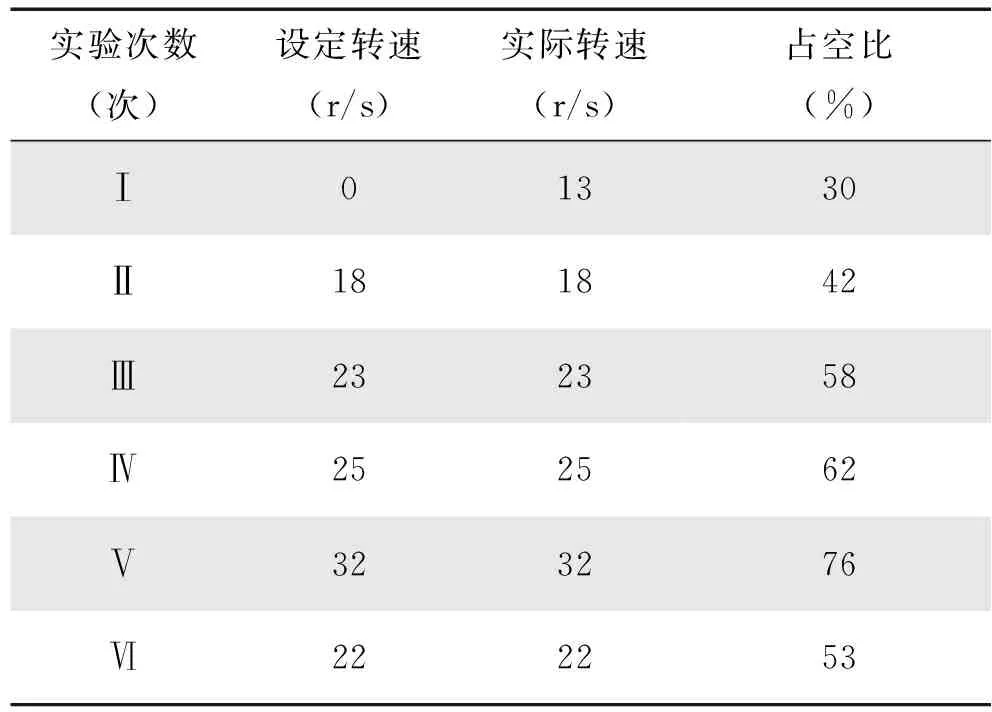
表1 实验测试结果Table 1 Experimental test results

图4 数字直流调速系统Fig.4 Digital DC speed control system

图5 实验结果Fig.5 Experiment result
5 结束语
本文介绍的是一种基于STM32F103全数字直流调速系统,系统包括STM32单片机、键盘操作、LCD显示、转速检测与调理等部分。由于采用了带PWM功能的高性价比的32位STM32F103单片机,简化了硬件电路结构,降低了程序设计的难度。同时,在实验时采用的是自带光电旋转编码器的334线AB相直流微电机,使得因故障、人为原因等造成的测速不准的概率大大降低,并保证测速的精度。实验表明该方案切实可行,且具有性价比高、可靠性好、精度高等优点。
[1]吉雪花.小功率直流伺服电机调速系统的设计[D].保定:河北农业大学,2010.
[2]费新华.基于PWM控制的直流电机驱动设计[J].数字技术与应用,2012,(11):155-156.
[3]蒋玉龙,陶安利,董丙龙等.基于虚拟技术的单闭环直流调速系统的研究[J].传感器世界,2014,20(1):28-31.
[4]胡学芝,南光群.基于TMS320LF2407A的直流调速系统研究[J].电气传动自动化,2012,34(4):20-23.
[5]张新荣.单片机控制PWM直流双闭环调速系统设计[J].电气应用,2010,29(16):66-69.
[6]刘新正.电机学(第七版)[M].北京:电子工业出版社,2014.
[7]王春凤,李旭春,薛文轩.PWM直流调速系统实验的教学实践[J].实验室研究与探索,2012,31(8):32-34.
[8]刘军.例说STM32[M].北京:北京航空航天大学出版社,2014.
[9]郑隆举,李慧芳,王志全,等.基于单片机的电机测速系统设计[J].自动化与仪器仪表,2015,(3):37-39.
[10]卢明玺,HT46单片机实验系统设计[J].邵阳学院学报(自然科学版),2015,12(1):11-19.
Design of digital DC speed control system based on STM32
LI Hui,SHI Shuqi,DOU Le,QIU Xionger,LIU Xinbo
(Hunan Provincial Key Laboratory of Grids Operation and Control on Multi-Power Sources Area,Shaoyang University,Shaoyang 422000,China)
The digital DC speed control system is composed based on DC motor and STM32F103,of which the motor is used as the controlled object and the STM32 as controller in this paper.Firstly the principle of the motor working and DC speed regulation are introduced,then the pulse width modulation(PWM)technique and the corresponding software program is used to realize the system designed ultimately,finally the experimental system is set up and the result of the DC speed regulation experiment is also given.The experimental results show that the control system has good cost performance,high accuracy and stable motor speed regulation,and it proves that the design scheme is available for the real system.
STM32F103VET6;PID;PWM;DC speed regulation
1672-7010(2017)01-0088-05
2016-09-28
湖南省大学生研究性学习和创新性试验计划项目(湘教通[2016]283号);国家级大学生创新创业训练计划项目(教育司函[2016]45号);湖南省教育厅科学研究项目(16C1448);湖南省科技计划项目(2016TP1023);湖南省教育厅科学研究重点项目(16A191);湖南省科技计划重点研发计划项目(2016GK2021)
李辉(1984-),男,湖南衡阳人,讲师,硕士,从事测控专业教学及虚拟仪器技术与嵌入式控制系统的研究;E-mail:2506623901@qq.com
TM932 < class="emphasis_bold">文献标志码:A
A
猜你喜欢
大电机技术(2022年5期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
测控技术(2021年10期)2021-12-21
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
通信电源技术(2018年3期)2018-06-26
电子制作(2017年1期)2017-05-17
电源技术(2015年11期)2015-08-22
电测与仪表(2015年10期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
