
基于无人机倾斜摄影的露天矿边坡三维重建
2017-04-17 05:09:14蒋瑞波肖海红
中国矿业 2017年4期
王 果,蒋瑞波,肖海红,张 迪
(1. 河南工程学院土木工程学院,河南 郑州 451191;2.煤化工资源综合利用与污染治理河南省工程实验室,河南 郑州 451191)
基于无人机倾斜摄影的露天矿边坡三维重建
王 果1,2,蒋瑞波1,2,肖海红1,2,张 迪1,2
(1. 河南工程学院土木工程学院,河南 郑州 451191;2.煤化工资源综合利用与污染治理河南省工程实验室,河南 郑州 451191)
露天矿边坡几何形状由于自然条件以及采矿工艺的影响具有复杂性,传统的测绘方式难以进行全面描述。提出一种基于无人机倾斜摄影技术的全自动露天矿边坡三维重建方法,利用无人机搭载的数码相机获取矿区序列倾斜影像,通过特征提取、空三测量、多视影像密集匹配,构建不规则三角格网和纹理映射,自动重建出露天矿边坡三维模型。选取三门峡渑池某铝矿进行试验,结果表明,重建的三维模型可全面表达露天矿边坡整体形态和保持局部细节特征,而且具备高效低成本等特点,在露天矿三维地形滑坡动态监测和灾害分析方面具有重要意义。
无人机倾斜摄影;露天矿;三维重建;纹理映射
伴随露天矿的不断开采,露天矿边坡的高度会不断增加,由于边坡的稳定性问题,可能造成边坡坍塌等工程事故,给安全生产带来隐患,对矿区人员和设备的安全造成威胁[1]。因此,快速获取露天矿边坡的动态监测数据,通过边坡发育机理研究和变化趋势预测,建立边坡工程预防措施,对矿区的安全生产具有重要的意义[2]。
常见的边坡数据获取手段主要有以下几种方法:①利用全站仪、GNSS进行单点式数据获取,此类方法精度高易于连续观测,但由于布设的监测点位分散,难以对露天矿边坡进行全面描述;②利用D-INSAR技术获取边坡形变信息,但星载合成孔径雷达系统对一测区存在较长的重访周期,难以根据需要的时间分辨率对监测区域实现连续监测[3-4];③利用近景摄影测量方法获取边坡形变信息,该类方法能够节省人力物力,获取大量观测点的空间位置,但在露天矿边坡图像获取时,由于矿区地形条件复杂,通常拍摄距离较远,难以获得良好的重建效果[5];④利用三维激光扫描技术对边坡进行三维重建,该类方法能完成三维数据的快速获取,在此基础上,需要对深度图像分割、标志点匹配、滤波简化、点云拼接等步骤,存在以下缺点:一方面三维激光扫描设备价格昂贵,而且后续处理过程复杂,数据处理自动化程度仍较低[6-10]。
作为一种新兴的三维数据获取方法,无人机倾斜摄影技术将无人机技术与倾斜摄影技术有效结合,通过无人机搭载多台传感器,同时从垂直和多个倾斜角度获取影像,突破传统航测从垂直角度拍摄的局限[11],具备生产周期短、高效率、高精度、低成本等优点,已经被应用于三维城市建模[12]、特高压输电线路路径优化[13]、应急救灾等领域。本文利用无人机搭载的数码相机获取矿区序列影像,以三门峡渑池某铝矿为研究区域,对露天矿边坡数据获取和构建方法进行深入研究。
1 基于无人机倾斜摄影的露天矿边坡重建
受时空分辨率、外界环境、飞行场地要求及使用成本的影响,卫星遥感和载人航空摄影测量手段,难以满足地理空间数据获取的需求。伴随着自动控制工程和材料领域的发展,低空无人机(Unmanned Aerial Vehicle,UAV)遥感具备实施性强、成本低、机动灵活、几乎不受场地限制等有优势,成为快速获得地理数据的有效平台[14]。通过无人机搭载多台倾斜摄影传感器,从垂直和多个倾斜角度同时获取影像,突破传统航测从垂直角度拍摄的局限[15],更有利于露天矿边坡纹理数据获取。
主要包括以下步骤:边坡影像数据采集、数据预处理、边坡三维模型构建等步骤,整个流程如图1所示。

图1 露天矿边坡三维重建流程
1.1 边坡数据采集
包括边坡周边实地踏勘、航线规划和数据采集,通过实地踏勘,了解边坡周围的布局,周围地物的高度,以Google Earth下载的影像为底图,按照以下步骤生成航线:①测区绘制;②飞行参数输入;③产生航点数据[16]。然后将规划的航线上传至无人机飞控系统,进行航飞完成边坡数据采集。
1.2 数据预处理
由于相机在飞行器起飞前已经处于工作状态,飞控获得的定位定姿(POS)数据数量会少于影像数量,因此需要根据规划的航线对飞控数据进行整理,另一方面,受偏向风干扰,会存在影像重叠率不规则、影像畸变差较大、影像对比度不相同等现象,需要对影像的数量、清晰度、色彩反差、色调和层次的丰富性进行检查。
1.3 边坡三维模型构建
在数据预处理的基础上,对影像利用SIFT(Scale Invariant Feature Transformation)算法进行特征提取,按照式(1)进行光束法联合空三测量,得到经过优化的高精度外方位元素和消除畸变后的影像,用于后续边坡三维模型创建和纹理提取,整个流程如图2所示。
(1)

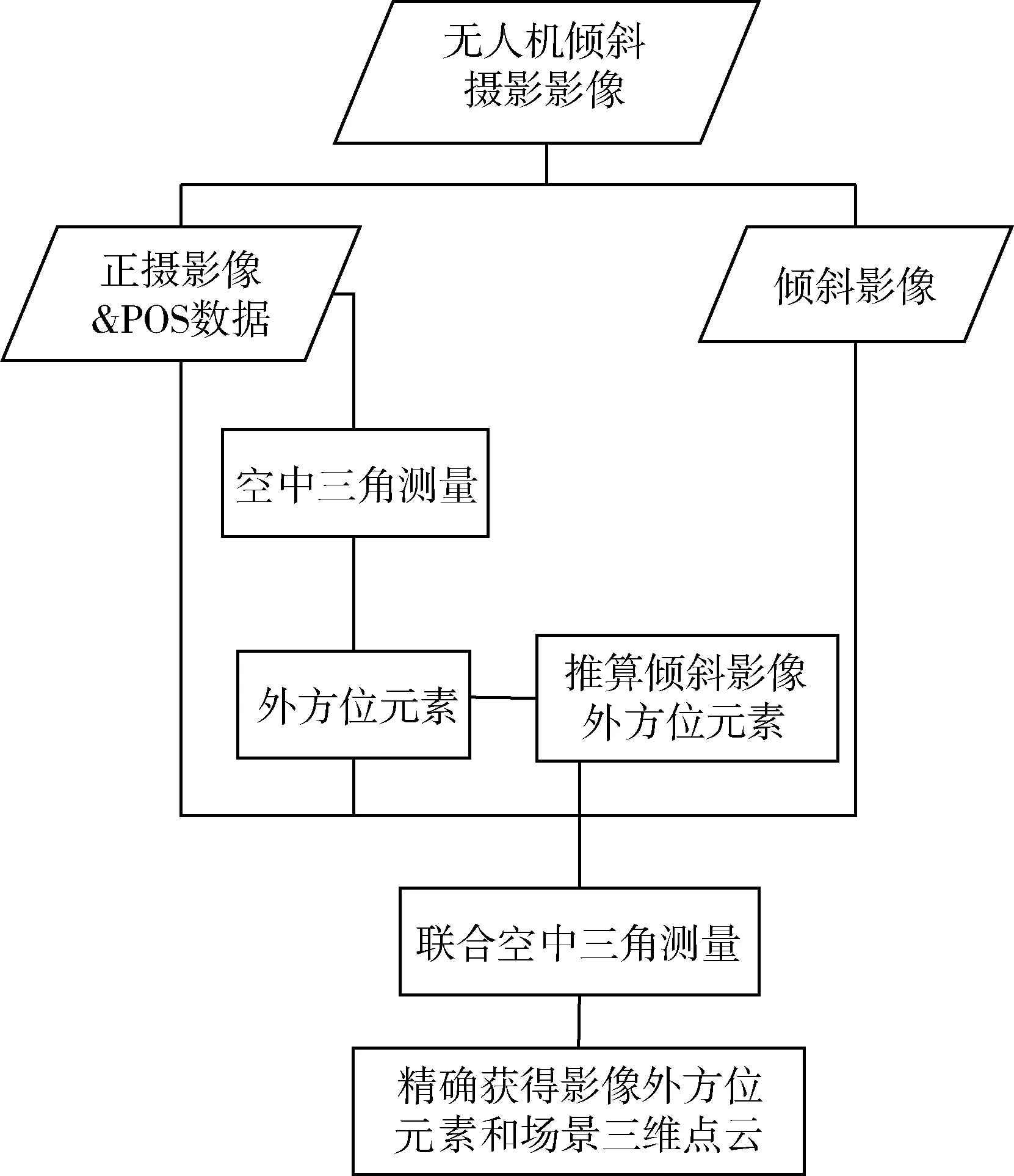
图2 联合空中三角测量流程图
通过多基元、多视密集影像匹配进行立体像对创建,将规则格网划分后的空间平面作为基础,综合利用像方特征点和物方面元,以及多视影像上的成像信息和特征信息,采用参考影像不固定的匹配策略,对无人机采集的多视影像进行密集匹配[17],利用并行算法快速准确获得多视影像同名点坐标,进而获取高密度三维点云数据并生成DSM,最后通过纹理映射得到全要素三维模型。
2 露天矿边坡三维重建试验
2.1 模型重建试验
选取三门峡渑池某露天铝矿为试验区,如图3所示,试验区内地貌特征明显,环境较为复杂,采用6轴固定翼无人机飞行平台,搭载增稳平台和五镜头倾斜相机(传感器尺寸13.2mm×8.8mm,相机焦距为10.4mm),如图4所示,为了保证数据采集的完整性,设计相对航高为90m,布设4条航线,航向重叠度80%,旁向重叠度80%,水平飞行速度6m/s,前后左右正射五个相机共获得805张影像,影像尺寸为5472像素×3678像素,倾斜影像平均地面分辨率为2.08cm,通过多视影像密集匹配生成的密集点云数据和数字表面模型分别如图5和图6所示。

图3 研究区域空间位置

图4 六轴无人机倾斜摄影平台数据获取
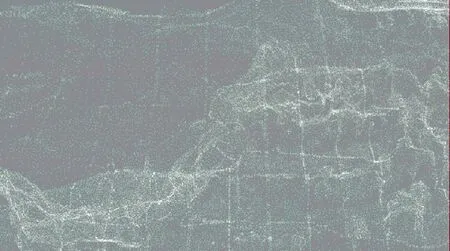
图5 试验区三维点云数据

图6 试验区数字地表模型
图7所示为经过纹理映射后的真三维试验区边坡三维模型,为了得到边坡建模效果的局部细节信息,将图7中区域进行放大显示,如图8所示。

图7 试验区真三维模型

图8 试验区重建效果局部放大
2.2 试验结果分析
从图7和图8可以看出,重建出的露天矿边坡三维模型可以形象、直观地表达露天矿边坡区域的地貌特征,不仅模型完整,而且细节层次清晰。为了定量评估重建模型误差,事先利用白灰在试验区周围地势相对平坦地方均匀布设12个“十字型”精度检验标志,布设的标志如图9所示,并用GPS-RTK对标志中心进行坐标采集,将重建三维模型上获取的对应点坐标通过坐标转换与RTK采集的坐标进行比对分析,对比结果如表1所示。

图9 “十字型”精度检验标志布设

表1 精度检验标志坐标对比表(单位:m)
从表1比较结果可以看出,X方向最大相差7.43 cm,平均相差8.7 mm;Y方向最大相差6.74 cm,平均相差8.6 mm;Z方向最大相差9.24 cm,平均相差4.82 cm。由此可见,通过无人机倾斜摄影技术进行露天矿边坡重建技术是可行的,可以通过在重建的三维模型上进行量测,获取滑坡区域的长度、宽度、体积、坡度等信息,完成滑坡灾害的定量评估,对于精细识别和解译滑坡、开展边坡监测预警及针对性的防治预案制定具有重要指导意义。
3 结 论
针对露天矿边坡几何形状由于自然条件以及采矿工艺的影响具有复杂性,传统的测绘方式难以进行全面描述这一客观事实,以及露天矿边坡稳定性研究需要,提出利用无人机倾斜摄影方法进行露天矿边坡三维重建方法,通过六旋翼无人机获取露天矿边坡区域高分辨率倾斜影像,利用影像三维重建以及纹理关联,对三门峡铝矿边坡进行三维模型构建试验,验证了基于无人机倾斜摄影的露天矿边坡三维建模技术的可行性,为露天矿三维地形滑坡动态监测、灾害分析、预测提供可靠的三维模型数据支持。
[1] Chen Jianping, Li Ke, Chang K J, et al. Open -pit mining geomorphic feature characterization[J]. International Journal of Applied Earth Observation and Geoinformation, 2015, 42: 76-86.
[2] 王建民,张锦,邓增兵,等. 时空Kriging插值在边坡变形监测中的应用[J]. 煤炭学报,2014,39(5): 874-879.
[3] 杨帆,邵阳,马贵臣,等. INSAR技术在海州露天矿边坡变形监测中的应用研究[J].测绘科学,2009,34(6):56-58.
[4] 李海铭. 基于 D-InSAR 的露天矿边坡位移监测研究[D].鞍山: 辽宁科技大学, 2013.
[5] 吴庆深,衣瑛. 基于远距离场景影像的露天矿边坡三维重建技术[J].金属矿山,2014(10):130-132.
[6] 褚洪亮,殷跃平,曹峰,等. 大型崩滑灾害变形三维激光扫描监测技术研究[J]. 水文地质工程地质, 2015, 42(3): 128-134.
[7] 赵小平,闫丽丽,刘文龙. 三维激光扫描技术边坡监测研究[J].测绘科学,2010,35(4): 25-27.
[8] 刘亚兵,严怀民,刘如飞. 基于车载三维激光扫描技术的露天矿三维建模[J].露天采矿技术,2015(4): 37-39.
[9] 杨帆,李龙飞,吴昊. 基于三维激光扫描的边坡变形数据提取研究[J].测绘工程,2016,25(10): 1-4.
[10] 李崇瑞,张锦,肖杰. 应用TLS点云数据确定边坡特征对象区域和形变分析[J].测绘通报,2016(7): 94-97.
[11] 孙宏伟. 基于倾斜摄影测量技术的三维数字城市建模[J].现代测绘,2014,37(1):18-21.
[12] 王琳,吴正鹏,姜兴钰,等. 无人机倾斜摄影技术在三维城市建模中的应用[J]. 测绘与空间地理信息,2015,38(12):30-32.
[13] 丁亚洲. 无人机倾斜摄影技术在特高压输电线路路径优化中的应用研究[J]. 低碳技术,2016(8): 101-102.
[14] 孙宏伟. 基于倾斜摄影测量技术的三维数字城市建模[J].现代测绘,2014,37(1): 18-21.
[15] 李隆方,张著豪,邓晓丽,等. 基于无人机影像的三维模型构建技术[J].测绘工程,2013,22(4): 85-89.
[16] 李秀丽. 基于Google地图数据的可视化无人机航线规划研究[J].测绘通报,2014(1): 74-76.
[17] GERKE M. Dense matching in high resolution oblique airborne images[EB/OL].[2012-3-15]. http://www.isprs.org/proceedings/xxxviii/3-w4/pub/cmrt09_gerke.pdf.
Research on slope reconstruction technique based on UAV oblique photogrammetry
WANG Guo1,2,JIANG Ruibo1,2,XIAO Haihong1,2,ZHANG Di1,2
(1. Institute of Civil Engineering, Henan Institute of Engineering, Zhengzhou 451191, China; 2. Engineering Laboratory of Comprehensive Coal Resource Utilization and Pollution Control in Henan Province,Zhengzhou 451191, China)
Because of the complex natural condition and the difference of mining technology, the traditional surveying methods are difficult to describe the geometry of open-pit slope in a comprehensive way. A fully automatic open-pit slope reconstruction in three dimension based on UAV oblique camera technique is proposed. Unmanned aerial vehicle equipped with digital oblique cameras is used for image sequence acquisition in open-pit area, through feature extraction, aerial triangulation, dense matching, 3D point cloud are generated, and then through irregular triangular gridding and texture mapping, 3D model of open-pit slope are reconstructed automatically. An open-pit slope of aluminum mine in Sanmenxia Mianchi city is selected for experiment, the results show that the reconstructed 3D model can not only fully express the overall shape of open-pit slope but also maintain local features, with the characteristics of high efficiency and low cost. It is an important significance in the field of three-dimensional terrain and landslide hazard analysis in open-pit mine.
UAV oblique photogrammetry; open-pit mine; three-dimensional reconstruction; texture mapping
2016-10-30
煤化工资源利用与污染治理河南省工程实验室开放基金资助(编号:502002-B02、502002-B03);河南工程学院博士基金资助(编号:D2015040)
王果(1986-),男,博士,讲师,主要从事三维数据获取及处理方面的研究工作,E-mail:wangguo0123@126.com。
TD67;P237
A
1004-4051(2017)04-0158-04
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30 06:10:38
电子乐园·上旬刊(2021年8期)2021-05-16 09:55:48
软件(2020年3期)2020-04-20 00:56:34
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
中国公共安全(2017年7期)2017-10-13 08:18:11
电子制作(2017年9期)2017-04-17 03:01:00
光学精密工程(2016年6期)2016-11-07 09:07:56
中国煤炭(2016年9期)2016-06-15 20:29:54
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
