多方博弈下起重作业人员有意不安全行为致因分析*
2017-04-14 05:27郑霞忠史高阳
中国安全生产科学技术 2017年5期
郑霞忠,史高阳,陈 述
(1. 三峡大学 水利与环境学院,湖北 宜昌 443002;2. 水电工程施工与管理湖北省重点实验室,湖北 宜昌 443002)
0 引言
起重机械操作简便、运行效率高,在工程建设中应用广泛[1]。然而,受人、机、环等各方面因素影响,近年来起重作业事故频发,随着科技发展,设备可靠性逐渐增强,由人的不安全行为引发的事故变得更为频繁。据统计,2015年共发生起重作业安全事故79起,占特种设备事故总数的30.74%,其死亡人数占41.01%,其中,由违章作业、操作不当等不安全行为引发69起,事故占比高达87.34%[2]。人的不安全行为是指能引发事故的差错行为,分为有意识和无意识2类。由于起重作业过程参与方多,各方策略选择随机,作业人员有意不安全行为受主观因素影响大,在安全事故中作用凸显,因此,系统分析起重作业人员有意不安全行为演化路径,剖析有意不安全行为致因,制定有意不安全行为防范策略,为起重作业安全事故预防提供一定的参考。
起重作业危险系数高,事故后果严重,其安全问题的探讨是工程施工领域关注的热点[3]:国内外学者已从结构优化、防撞系统、安全监控等方面,对起重机械安全进行了研究[4-6]。随着不安全行为问题的凸显,起重作业事故的研究逐渐转移到安全行为视角[7]:施笑畏等[8]运用模糊算法,分析起重机司机操作的动作流程与规律,构建了起重机司机操作行为规范库;王喜梅等[9]运用模糊综合评价法,分析起重机驾驶员的安全行为能力,辨识了安全行为能力影响因素;任卫军等[10]建立三维虚拟模型,结合作业行为规则对驾驶员作业技能进行评价,提出了培训建议;赵勇等[11]利用HCR模型分解作业流程,进行了起重机操作人员人因失误研究;郑霞忠等[12]运用模糊理论改进CREAM方法,构建起重作业人因可靠性模型,实现了人因失误的量化分析。
以上研究主要从作业人员行为规范、行为能力、人因失误等角度对起重作业人员安全行为进行了研究,在一定程度上减少了起重安全事故的发生,但较少分析其他参与方对作业人员有意不安全行为的影响。基于此,本文从施工企业内部管理方、监管方及作业方三方的动态博弈角度出发,构建施工企业内部演化博弈模型,分析企业、监管方策略选择等对作业人员有意不安全行为的影响,探讨作业人员有意不安全行为防范措施,对于有效预防有意不安全行为发生,降低起重作业安全事故率具有重要意义。
1 演化博弈模型构建
有意不安全行为是指由主观意识所指导的、故意的不安全行为,其本质是对利益或效用最大化选择的决策结果[13]。施工过程中,部分作业人员由于工作经验丰富,熟悉工作环境,存在一些习惯性有意不安全行为,没有引发严重事故,长期未被发现和纠正,在实践中反复出现而固定化或程式化[14],作业人员进行作业时会默认选择此模式,而忽视不安全行为存在的风险。
演化博弈论认为,具有有限理性的博弈各方无法准确判断自身在博弈中的状态,需通过一定的策略逐渐演化,最终达到一种稳定状态[15]。起重作业方有意不安全行为演化博弈模型的局中人包括施工企业内部管理方、监管方和作业方3个有限理性的博弈方,管理方策略集合为{加大安全投入,减少安全投入},监管方策略集合为{监管、不监管};作业方策略集合为{有意不安全行为,按规程作业}。模型假设如下:
假设1:安全投入不变情况下,管理方获得收益I,支付工资总和为R,加大安全投入时,需付出安全投入成本C,员工获得的安全培训、福利待遇等的价值为E,由于作业方与监管方综合能力的提升,获得额外收益I1。
假设2:作业方按照规则作业,工资收入为A,获得工效b,付出劳动成本D,承担风险H,发生安全事故概率为α,事故后果g由管理方承担。作业方选择进行有意不安全行为概率为x,付出的劳动成本减少D1,获得额外工效b2,为管理方创造收益I3,但同时承担风险增加H1,若被监管方发现罚款Q,此时与监管方发生冲突概率为η,双方损失均为N,安全事故的概率为β,事故后果G,作业方承担事故损失比例为λ。
假设3:监管方选择严格监视作业方安全行为概率为y(企业增加安全投入时,监管方可识别出全部不安全行为),付出劳动力等成本为J,工资收入M,承担风险H,发现作业方不安全行为奖励M2,发生事故时不承担事故后果,但可使事故损失减少比例γ,监管方不监管时,付出劳动力成本减少J1,承担风险增加H1,出现事故时承担事故损失比例为μ,不发生事故时,获得奖励M1。
假设4:管理方减少安全投入时,获得额外收益I2,但此时员工由于安全培训少,心理落差大等原因,作业方操作技能下降,工效降低b1,安全意识减弱,对不安全行为认识不足,有意不安全行为概率增大,安全事故发生概率增加δ;监管方识别不安全行为能力下降,识别出不安全行为的比例为κ。
若企业选择增加安全投入概率为θ,则根据施工企业安全投入增加或减少策略,管理方、监管方、作业方三方之间的博弈树如图1所示,图中节点①~④处(管理方增加安全投入时)与节点⑤~⑧处(管理方减少安全投入时)管理方、作业方、监管方各自的得益矩阵分别见表1和表2。
表1中,节点③表示在管理方增加安全投入时,监管方选择不监管策略,作业人员采取有意不安全行为策略,此时:
1)管理方角度:管理方获得收益I+I3,支付工资R,付出成本C,承担事故后果β(1-λ-μ)G,则管理方的得益为:I-C-β(1-λ-μ)G-R+I3。
2)作业方角度:管理方增加投入时,作业方获取价值E,工资收入A,获得工效b+b2,承担风险H+H1,付出的劳动成本D-D1,发生事故时,承担事故后果βλG,则作业方的得益为:A-(D-D1)-(H+H1)+(b+b2)+E-βλG。
3)监管方角度:管理方增加投入时,监管方获取价值E,工资收入M,获得奖励(1-β)M1,付出劳动力等成本为J-J1,承担风险H+H1,承担事故后果βμG,则监管方的得益为:M-(J-J1)-(H+H1)+(1-β)M1+E-βμG。
同理,可分析①~⑧中其余节点处管理方、作业方、监管方各方相应的得益,建立表1和表2中三方得益矩阵。

图1 三方演化博弈树Fig.1 Evolutionary game tree

作业方监管方不监管(y)监管(1-y)有意不安全行为(x)③①I-C-β1-λ-μ()G-R+I3;A-D-D1()-H+H1()+b+b2()+E-βλG;M-J-J1()-H+H1()+1-β()M1+E-βμG;I-C-β1-λ()1-γ()G-R+I3;A-D-D1()-H+H1()+b+b2()+E-βλ1-γ()G-Q-ηN;M-J-H+E+M2-ηN;按规程作业(1-x)④②I-C-α1-μ()g-R+I1;A-D-H+b+E;M-J-J1()-H+H1()+E-αμg;I-C-α1-γ()g-R+I1;A-D-H+b+E;M-J-H+E;
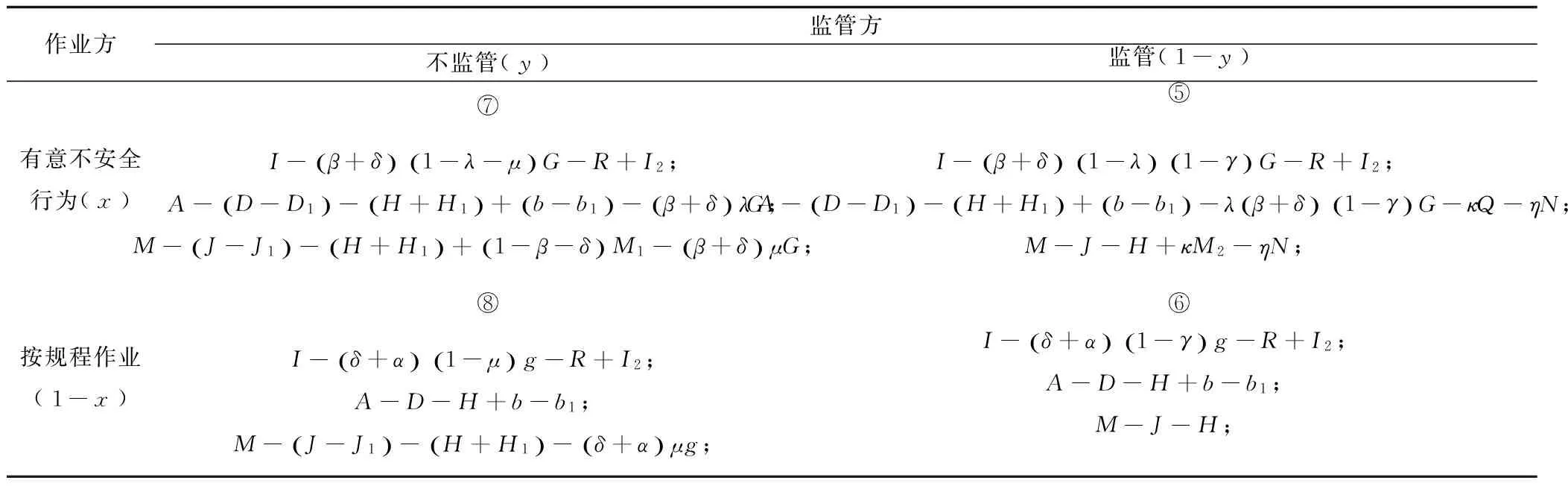
表2 减少安全投入时管理方、作业方、监管方的得益矩阵
2 演化博弈模型求解
本文以管理方选择增加安全投入策略时,作业方与监管方的策略选择演化过程为例,对三方策略演化进行求解。
根据演化博弈理论[16],作业方选择有意不安全行为的期望收益为:
W0=A-(D-D1)-(H+H1)+(b+b2)+E+
(1-y)(λγβG-Q-ηN)-λβG
(1)
作业方选择按规程作业的期望收益为:
W1=A-D-H+b+E
(2)
根据式(1)和式(2)得出作业方的平均期望收益为:
y)(λγβG-Q-ηN)-λβG)+A-D-H+b+E
(3)
则作业方选择有意不安全行为的复制动态方程为:
y)(λγβG-Q-ηN)-λβG)
(4)
安全监管方选择不监管策略时的期望收益为:
V0=x[M-(J-J1)-(H+H1)+(1-β)M1+E-
μβG]+(1-x)[M-(J-J1)-(H+H1)+E-αμg]=
M-(J-J1)-(H+H1)+E+x(1-β)M1-xμβG-
(1-x)αμg
(5)
安全监管方选择监管策略时的期望收益为:
V1=M-J-H+E+xM2-xηN
(6)
根据式(5)和式(6)得出安全监管方的平均期望收益为:
y)(xM2-xηN)+y[J1-H1+x(1-β)M1-xμβG-
(1-x)αμg]
(7)
则安全监管方选择监管策略的复制动态方程为:
(8)
结合式(4)和式(8)得出博弈双方的系统动态方程为:
(9)
则系统的雅克比矩阵为:
J=
(10)
通过对雅克比行列式的局部稳定性分析,可以得到其均衡点的稳定性[17],此处主要从4种情况进行分析,分析结果及演化趋势分别见表3、图2所示:

表3 局部稳定性分析

图2 4情况相位Fig.2 Phase diagram of case 1 to 4
情况1:当D1+b2>H1+λβG,J1>H1时,复制动态方程有4个平衡点:(0,0),(0,1),(1,0),(1,1),计算雅克比矩阵的行列式和迹,结果如表2情况1所示,则最终演化稳定点为(1,1),雅克比矩阵的行列式和迹为:
(11)
此时,作业方选择有意不安全行为策略,监管方选择不监管策略。即当作业方选择有意不安全行为所得的额外工效及减少的成本付出之和大于其承担的风险、罚款与发生事故时需承担的损失之和时,作业方倾向于选择有意不安全行为策略,不监管时监管方减少的成本大于额外付出的风险成本时,监管方倾向于选择不监管策略。
情况2:当D1+b2>H1+λβG,J1 -(D1-H1+b2-(λγβG-Q-ηN)-λβG)+ (J1-H1-M2-ηN+(1-β)M1-μβG)<0 (12) 此时,作业方选择有意不安全行为策略,监管方选择监管策略。即当作业方选择有意不安全行为所得的额外工效及减少的成本付出之和大于其承担的风险、罚款与发生事故时需承担的损失之和时,作业方倾向于选择有意不安全行为策略;当不监管时监管方减少的成本小于额外付出的风险成本时,监管方倾向于选择监管策略。 情况3:当D1+b2 -(D1-H1+b2-λβG)(J1-H1-αμg)>0 (D1-H1+b2-λβG)-(J1-H1-αμg)<0 (13) 此时,作业方选择按规范作业策略,监管方选择不监管策略。即当作业方选择有意不安全行为所得的额外工效及减少的成本付出之和小于其承担的风险、罚款与发生事故时需承担的损失之和时,作业方倾向于选择按规范作业策略,当不监管时监管方减少的成本大于额外付出的风险成本时,监管方倾向于选择不监管策略。 情况4:当D1+b2 (D1-H1+b2-(λγβG-Q-ηN)λβG)(J1-H1- αμg)>0 (D1-H1+b2-(λγβG-Q-ηN)-λβG)+(J1-H1-αμg)<0 (14) 此时,作业方选择按规范作业策略,监管方选择监管策略。即当作业方选择有意不安全行为所得的额外工效及减少的成本付出之和小于其承担的风险、罚款与发生事故时需承担的损失之和时,作业方倾向于选择按规范作业策略;当不监管时监管方减少的成本小于额外付出的风险成本时,监管方倾向于选择监管策略。 同时,由表1可知,企业进行安全投入的期望收益为: P0=xy[I-C-β(1-λ-μ)G-R+I3]+x(1- y)[I-C-β(1-λ)(1-γ)G-R+I3]+(1-x)y[I- C-α(1-μ)g-R+I1)]+(1-x)(1-y)[I-C- α(1-γ)g-R+I1] (15) 在上述4种稳定点情况下,企业期望收益分别为: 1)情况1,稳定点为(1,1)时,P0=I-C-β(1-λ- μ)G-R+I3。 2)情况2,稳定点为(1,0)时,P0=I-C-β(1-λ)(1-γ)G-R+I3。 3)情况3,稳定点为(0,1)时,P0=I-C-α(1-μ)g-R+I1。 4)情况4,稳定点为(0,0)时,P0=I-C-α(1-γ)g-R+I1。 根据模型求解结果可知,当企业选择增加安全投入时,作业人员有意不安全行为除了与风险变化H1、成本变化D1、事故发生概率β、承担事故损失比例λ、冲突概率η、冲突成本N、事故后果g,G及获得的奖励b2等有关,且受监管方选择监管策略的概率大小影响,据此,从各方角度考虑制定作业人员有意不安全行为预防策略如下: 管理方角度:管理方得益主要与事故发生概率、作业方与监管方策略选择、事故后果严重程度有关。管理方可适当提升作业方与监管方事故后果承担比例λ,μ,以减少有意不安全行为发生概率,更好的维护自身利益。 监管方角度:监管方进行策略选择时,需权衡成本、风险、奖励等因素,且应注意与作业方之间的沟通方式,尽可能避免与作业方发生冲突,以降低冲突概率、成本。监管方可依据作业方有意不安全行为策略选择情况选择监管密度,以更好地约束作业方有意不安全行为的发生。 作业方角度:一般来讲,由有意不安全行为引发的安全事故潜伏期不定,短时间内发生概率β偏小,不易引起注意,对比风险、成本及额外得益变化,作业方更倾向选择有意不安全行为,但事故一旦发生,损失惨重。作业方进行作业时,应综合考虑现场情况,尽可能减少盲目的有意不安全行为选择,以降低安全事故发生概率,减少事故损失,同时调整心态,避免产生逆反心理,与监管方冲突,危害自身及他人财产生命安全。 某施工项目起重作业施工企业在其安全投入不变情况下,管理方获得收益(I)为1000万元,支付工资总和(R)为300万元,加大安全投入时,需付出安全投入成本(C)150万元,此时员工获得的安全培训、福利等折合(E)50万元。如果作业方按照规则作业,工资收入(A)为150万元,获得工效(b)50万元,付出劳动成本(D)100万元,承担风险(H)50万元,发生安全事故概率(α)为0.1,此时管理方事故承担后果(g)200万元;如果作业方选择进行有意不安全行为,其付出的劳动成本减少(D1)50万元,获得额外工效(b2)100万元,为管理方创造收益(I3)100万元,但同时承担风险增加(H1)50万元,若被监管方发现罚款(Q)50万元,此时与监管方发生冲突概率(η)为0.2,双方损失(N)均为50万元,安全事故的概率(β)为0.2,事故后果(G)300万元,作业方承担事故损失比例(λ)为0.2;监管方选择严格监视作业方安全行为时,付出劳动力等成本(J)100万元,工资收入(M)150万元,承担风险(H)50万元,发现作业方不安全行为奖励(M2)50万元,可使事故损失减少比例(γ)0.6,监管方不监管时,付出劳动力成本减少(J1)80万元,承担风险增加(H1)50万元,出现事故时承担事故损失比例(μ)为0.2,不发生事故时,获得奖励(M1)200万元。当作业方选择有意不安全行为的概率及监管方选择不监管的概率均小于0.5时,取x=0.3,y=0.4,根据模型中计算公式分别计算作业方和监管方的得益,并据此判断各方选择策略,具体如下: 1)由式(1)可得作业方选择有意不安全行为的期望收益为: W0=200+0.6×(0.024×300-40)-0.04× 300=156.32(万元) 由式(2)可得作业方选择按规程作业的期望收益为: W1=150-100-50+50+50=100(万元) 则根据式(3),作业方的平均期望收益为: 2)由式(4)可知,安全监管方选择不监管策略时的期望收益为: V0=80+0.24×200-0.012×300-0.006× 200=121.6(万元) 由式(5)得安全监管方选择监管策略时的期望收益为: V1=50+0.3×50-0.3×0.2×50=62(万元) 则根据式(6)可知,安全监管方的平均期望收益为: 根据(1)和(2)计算结果,进一步可知: 由于D1+b2=150,H1+λβG=62,且J1>H1,则该施工企业状况符合情况1描述,此时,作业方倾向于选择有意不安全行为,监管方倾向于选择不监管策略。 同理,可判断当作业方选择有意不安全行为的概率及监管方选择不监管的概率均大于0.5时,各方的策略选择。 1)运用博弈理论,构建了施工企业内部三方演化博弈模型,梳理管理方及监管方策略对有意不安全行为决策的影响,提出有意不安全行为防范策略,减少有意不安全行为发生概率,综合提升整体收益,降低起重作业人员有意不安全行为引发事故可能。 2)通过模型求解及分析,起重作业人员有意不安全行为发生概率与监管策略选择概率、安全投入增加概率、承担事故损失比例、风险、冲突概率及冲突成本等负相关;与额外工效、奖励、成本减少量等正相关。 3)施工企业增加安全投入,提升起重作业人员事故损失承担比例,监管人员合理安排监管密度,并以合理方式严格监管作业行为,有利于约束起重作业人员的有意不安全行为。起重作业人员进行行为决策时,应权衡风险、成本、收益及各方策略选择,避免盲目选择有意不安全行为,造成生命财产损失。 [1] 陈力,刘关四,丁克勤. 起重机械疲劳寿命分析预测软件开发及工程应用[J]. 中国安全生产科学技术, 2016,12(9): 138-145. CHEN Li, LIU Guansi, DING Keqin .Software system development and engineering applicationfor fatigue life analysis and prediction of crane[J]. Journal of Safety Science and Technology, 2016,12(9): 138-145. [2] 国家质检总局特种设备局. 质检总局关于2015年全国特种设备安全状况情况的通报[R]. 2016. [3] 胡静波,庆光蔚,王会方,等. 基于模糊层次综合分析法的桥门式起重机分级评价[J]. 中国安全生产科学技术, 2014,10(1): 187-192. HU Jingbo, QING Guangyu, WANG Huifang, et al.Classification evaluation of bridge and gantry cranes based on fuzzy analytic hierarchy process[J],Journal of Safety Science and Technology, 2014,10(1): 187-192. [4] 吴浩,陶婧,林丹,等. 支持大型水电站缆机吊装施工的安全监控平台研究[J]. 武汉理工大学学报, 2012, 34(10): 127-131. WU Hao, TAO Jing, LIN Dan et al. Research of cable crane safety monitoring platform in large hydropower station hoisting construction[J]. Journal of Wuhan University of Technology, 2012, 34(10): 127-131. [5] Uddanwadiker Rashmi. Stress Analysis of Crane Hook and Validation by Photo-Elasticity [J]. Engineering, 2011, 3(9): 935-941. [7] Yoon Young Sik, Ham Dong-Han, Yoon Wan Chu. Application of activity theory to analysis of human-related accidents: Method and case studies[J]. Reliability Engineering & System Safety, 2016, 150: 22-34. [8] 施笑畏,牛延华. 基于行为分析的桥吊司机操作规范研究[J]. 计算机光盘软件与应用, 2013,34(2): 69-70. SHI Xiaowei,NIU Yanhua. Research on crane driver operation standard based on behavior analysis[J].Computer CD Software and Applications, 2013, 34(2): 69-70. [9] 王喜梅,傅跃明,刘辉. 起重机驾驶员安全行为能力评价[J]. 中国公共安全(学术版), 2014(4): 23-26. WANG Ximei,FU Yueming,LIU Hui. Evaluation of safety behavior capacity of crane drivers[J]. China Public Security:Academy Edition, 2014(4): 23-26. [10] 任卫军,王甜,史先信,等. 基于记录仪的汽车起重机驾驶员作业技能评价[J]. 机械设计与研究, 2014,30(2): 92-95. REN Weijun, WANG Tian, SHI Xianxin, et al.Evaluation on operative skill of truck crane driver based on data logger [J]. Machine Design and Research,2014,30(2): 92-95. [11] 赵勇,苌道方,陆后军,等. 岸边集装箱起重机司机安全操作可靠性分析[J]. 中国安全科学学报, 2014, 24(10): 77-81. ZHAO Yong, CHANG DaoFang, LU HouJun, et al. Reliability analysis of driver operating quayside container crane[J]. China Safety Science Journal, 2014, 24(10): 77-81. [12] 郑霞忠,郭雅薇,石法起,等. 塔机作业模糊认知可靠性与失误分析方法研究[J]. 中国安全科学学报, 2016,6(6): 98-103. ZHENG Xiazhong, GUO Yawei, SHI Faqi, et al. Research on fuzzy CREAM of crane operation [J],China Safety Science Journal, 2016,6(6): 98-103. [13] 叶龙,李森,沈梅. 安全行为学[M]. 北京:清华大学出版社, 2005. [14] 霍志勤,谢孜楠,张永一. 航空事故调查中人的因素安全建议框架研究[J]. 中国安全生产科学技术, 2011, 7(2): 91-97. HUO Zhiqin, XIE Zinan, ZHANG Yongyi. Research on the framework of safety recommendations for human factor in aviation accident investigation[J]. Journal Of Safety Science and Technology, 2011, 7(2): 91-97. [15] 王文轲,蔡洁,陈曾洁,等. 民航安全监管中的多方演化博弈研究[J]. 中国安全科学学报, 2016(1): 136-141. WANG Wenke, CAI Jie , CHEN Cengjie,et al. Research on multi-parties evolutionary gamein civil aviation safety supervision [J]. China Safety Science Journal, 2016,26(1): 136-141. [16] 郭本海,方志耕,刘卿. 基于演化博弈的区域高耗能产业退出机制研究[J]. 中国管理科学, 2012,20(4): 79-85. GUO Benhai, FANG Zhigeng, LIU Qing. Study of regional engergy industry’s exit mechinanism based on evolutionary game [J].Chinese Journal of Management Science,2012,20(4): 79-85. [17] 吴克晴,冯兴来. 改进的复制动态方程及其稳定性分析[J]. 纯粹数学与应用数学, 2015,31(3): 221-230. WU Keqing, FENG Xinglai. Improved replicated dynamic equations and its stability analysis [J]. Pure and Applied Mathematics,2015,31(3): 221-230.3 博弈结果分析
4 算例分析


5 结论
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05中学生数理化·中考版(2021年6期)2021-11-22汉语世界(The World of Chinese)(2021年4期)2021-09-05新世纪智能(数学备考)(2021年4期)2021-08-06新世纪智能(数学备考)(2021年4期)2021-08-06科海故事博览·中旬刊(2021年3期)2021-07-23哈尔滨体育学院学报(2020年2期)2020-05-18青少年科技博览(中学版)(2019年1期)2019-04-25环球时报(2019-01-11)2019-01-11好日子(2018年9期)2018-10-12