
一种基于霍尔效应的无刷式测速发电机*
2017-04-12 02:26赵浩
传感技术学报 2017年3期
赵 浩
(嘉兴学院南湖学院,浙江 嘉兴 314001)
一种基于霍尔效应的无刷式测速发电机*
赵 浩*
(嘉兴学院南湖学院,浙江 嘉兴 314001)
针对有刷直流测速发电机的输出特性线性误差较大这一问题,提出了一种基于霍尔效应的无刷式测速发电机。测速发电机由安装永磁磁钢的外定子、杯形转子和装配霍尔传感器的内定子三大部分组成,外定子中的永磁磁钢产生恒定磁场,杯形转子切割恒定磁场后产生感应电流,感应电流产生的磁场对内定子铁心中的霍尔元件进行作用,产生与杯形转子瞬时旋转角速度成正比的霍尔电势。本文推导了测速发电机的数学模型,包括输出特性和传递函数。对研制的无刷式测速发电机进行了特性测定实验,结果表明发电机的灵敏度系数约为61.1 mV/(rad/s),线性误差约为0.17%。
瞬时旋转角速度;霍尔效应;数学模型;特性测定
角速度是描述物体运行状态的重要参数,分为倾角角速度和旋转角速度。通过对瞬时角速度的测量,可以监测物体的运动状态,从而对其运动姿态进行控制。目前,角速度测量已经在汽车、军事、航天、工业、电子等多个领域得到了广泛的应用[1-2]。
近年来关于倾角角速度传感器的研究主要包括磁流体动力学角速度传感器[3]、微热对流角速度传感器[4]、新型MEMS 仿生三维角速度传感器[5-6]和基于Coriolis效应的微机械陀螺[7]等。
由于旋转机械的应用领域更为广泛,因此旋转角速度检测装置的使用范围也更大。目前测量旋转机械瞬时角速度的装置主要是测速发电机[8],测速发电机分直流、交流测速发电机两大类。直流测速发电机由于电刷接触电阻和电枢反应的影响,其输出特性的线性误差较大[9],约为0.3%左右[10],且存在低速失灵区和纹波影响[11];交流测速发电机不存在电刷接触电阻产生的影响,但运行时由于转子漏阻抗和激磁绕组漏阻抗的影响,同样导致其输出特性的线性误差较大[12];此外,由于交流异步测速发电机的两相定子绕组不完全垂直,或是气隙不均,磁路不对称,亦或是空心杯转子的壁厚不均以及制造杯型转子的材料不均,会造成一定的剩余电压[13]。
基于此,本文提出了一种基于霍尔效应的无刷式测速发电机。首先阐述了测速发电机的机械机构和工作机理;然后推导了测速发电机的数学模型;最后对测速发电机的特性进行了测定实验,得到了相应的性能指标。本文研制的测速发电机,无需换向装置,具有结构简单,线性误差小等优点。
1 测速发电机的结构和工作原理
1.1 机械结构
设计的无刷式测速发电机的机械结构如图1、图2所示,其中图2为图1对应的A-A剖面。发电机主要包括转轴、杯形转子、隔磁套筒、永磁磁钢、机座、内外定子和霍尔元件。

图1 测速发电机机械结构图
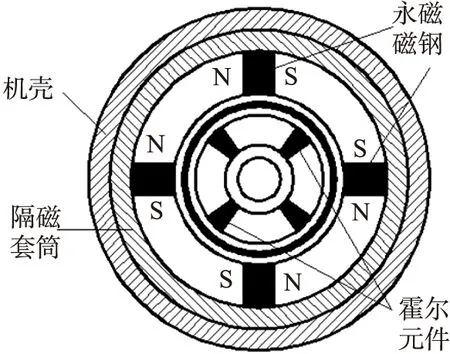
图2 测速发电机A-A剖面图
其中测速发电机的外定子通过外隔磁套筒固定在机座的内侧;永磁磁钢嵌放在各部分之间的夹槽中;内定子通过内隔磁套筒与右端盖固定,内隔磁套筒中心位置设有通孔,霍尔元件嵌放在各部分之间的夹槽中;杯形转子的杯壁置于内、外定子之间的空气隙中;内定子之间的霍尔元件与外定子之间的永磁磁钢,在空间相互错开45°角。
1.2 工作原理
外定子中的永磁磁钢产生的磁场分布情况如图3所示,磁力线经过外定子、空气隙、杯形转子和内定子后形成闭合回路。由于永磁磁钢与霍尔元件的安装位置在空间上错开45°角,因此永磁磁钢产生的磁场与霍尔元件不存在交链。
当杯形转子静止时,如图3(a)所示,由于永磁磁钢产生的恒定磁通没有穿过霍尔元件,因此霍尔元件不产生霍尔电势;当杯形转子开始转动时,即存在瞬时旋转角速度,如图3(b)所示。此时杯形转子开始切割永磁磁钢的恒定磁通,将杯形转子的杯体看作是很多根的导条,则根据法拉第电磁感应定律,杯形转子中产生与瞬时角速度对应的感应电动势。
假设杯形转子的旋转方向为逆时针,则根据右手定则,杯形转子产生的感应电动势方向如图3(b)所示。感应电动势产生相应的短路电流,短路电流的方向与感应电动势的方向相同。此时短路电流会产生对应的磁场,如图3(b)所示,该磁场经由内定子、霍尔元件、空气隙、杯形转子和外定子后形成闭合回路。由于该磁通与霍尔元件匝链,则根据霍尔效应,霍尔元件产生相应的霍尔电势。
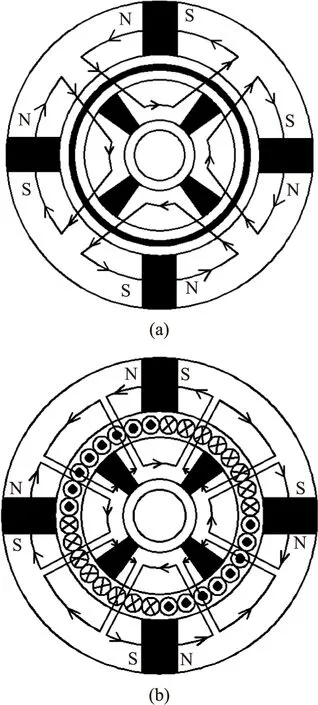
图3 测速发电机工作原理图
2 测速发电机的数学模型
2.1 输出特性
根据磁路的欧姆定理,永磁磁钢产生的恒定磁通量为:
ΦP=FP/RmP
(1)
式中:Fp为永磁磁钢的磁势,RmP为永磁磁钢产生的磁通所经过磁路的磁阻。
根据法拉第电磁感应定律,当杯形转子以瞬时旋转角速度Ω逆时针切割永磁磁钢的磁通时,产生的切割电动势为:
eR=CeΦPΩ
(2)
式中:Ce为与杯形转子结构相关的常数。
根据欧姆定律,杯形转子导条中产生的电流为:
iR=eR/rR
(3)
式中:rR为杯形转子的等效电阻。
根据磁路的欧姆定理,杯形转子4的电流产生的磁通量为:
(4)
式中:NR为杯形转子的等效匝数,RmR为杯形转子电流产生的磁通所经过磁路的磁阻。
根据霍尔效应可知,霍尔元件产生的霍尔电势为:
EH=KHIΦR
(5)
式中:KH为与霍尔元件结构和性质相关的常数,I为霍尔元件的控制电流。
联立式(1)~式(5),可得:

(6)
由式(6)可知,霍尔元件的电势与杯形转子的瞬时旋转角速度成正比。
2.2 传递函数
当杯形转子的瞬时角速度发生变化时,杯形转子中的电流也会发生变化,由于杯形转子存在电抗,根据基尔霍夫电压定律,杯形转子的电压平衡方程为:
(7)
对式(7)进行拉氏变换:
(8)
联立式(1)~式(8)可得:

(9)
由此可得测速发电机的传递函数为:
(10)
由此可知,由于杯形转子电抗的存在,测速发电机为一阶惯性环节,其时间常数为LR/rR,因此可选用电阻率较大的材料制作杯形转子。以改善测速发电机的动态特性。
3 测速发电机特性测定实验与分析
3.1 测定实验系统的组成
实验平台采用浙江大学求是科技的NMCL-Ⅱ型电机及传动试验台,系统主要包括:变频器,额定输出电压0~220V,额定输出频率0~1 000Hz,额定功率1.5kW;三相异步电动机,额定电压220V,额定转速1 425r/min;额定功率100W;测速发电机样机;光电式转速计,分辨率为1r/min,测量范围10r/min~10 000r/min。
三相电源通过变频器后与异步电动机的接线端子连接,通过调节通电频率可以改变异步电动机的旋转角速度;测速发电机的转轴通过刚性联轴器与三相异步电动机的转轴同心连接;联轴器的表面粘贴反光膜,通过光电式转速计测量系统的旋转角速度。整个实验系统安装完成后如图4所示。

图4 测速发电机特性测定实验系统

图5 测速发电机输出特性曲线
3.2 特性测定实验结果
调节变频器的输出电压为44 V~220 V输出,对应的频率为10 Hz~50 Hz,即对三相异步电动机采用恒压频比进行调速;三相异步电动机带动测速发电机样机旋转,利用光电式转速计测量系统的转速,并换算成旋转角速度;采用万用表记录测速发电机的输出电压。
实验数据如表1所示,对应的特性测定实验曲线分别如图5,对表1的实验数据进行线性拟合,得到的测速发电机的输出特性表达式为:
f(x)=61.1x-6.02 (mV)
(11)
由此可知,测速发电机的灵敏度约为61.1 mV/(rad/s)。其中式(11)中的常数6.02 mV为拟合后发电机的剩余电压,而实际测试时测速发电机无剩余电压,因此使用时可以忽略该常数。
将实验数据与拟合直线的理论值进行比较,得到测速发电机的线性误差约为0.17%。
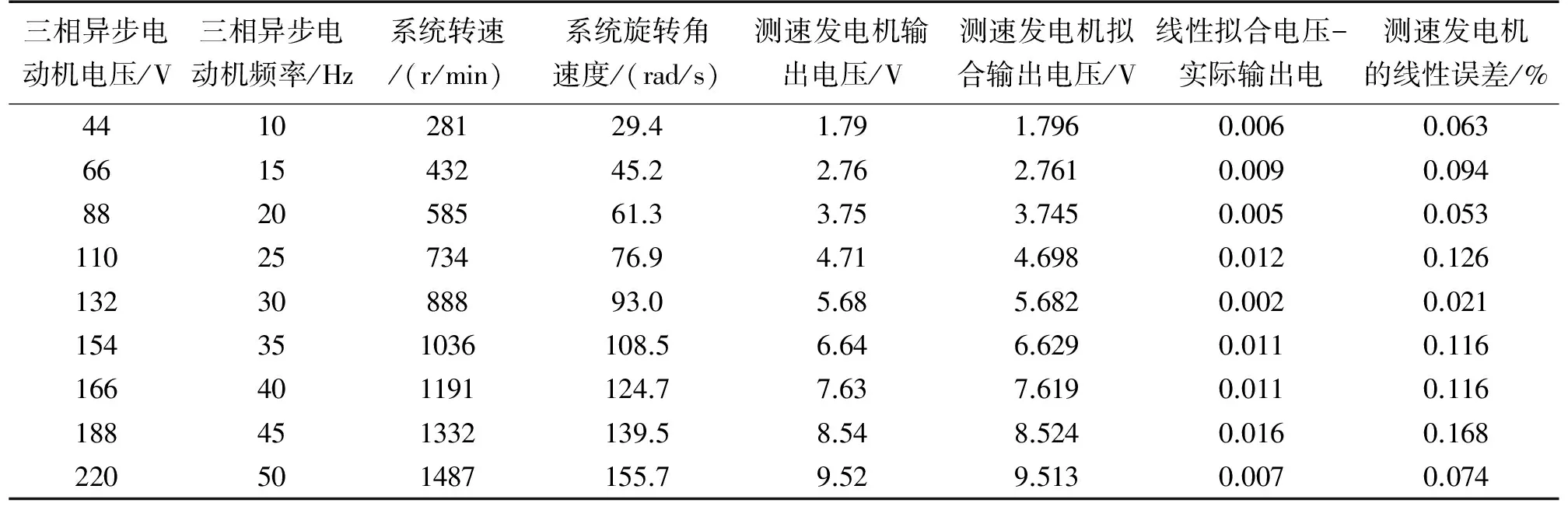
表1 特性测定实验结果
3.3 线性误差分析
根据测速发电机的传递函数推导过程可知,实际的杯形转子存在电抗,式(3)推导时忽略了杯形转子电抗,导致测速发电机的输出特性存在线性误差;此外,式(4)推导杯形转子电流产生的磁场时,忽略了磁阻的非线性,同样会导致测速发电机的输出特性存在线性误差。与文献[10]中测速发电机的线性误差0.3%相比,性能得到了明显改善。
4 结论
本文提出了一种基于霍尔效应的测速发电机,详细阐述了其机械结构和工作机理,推导了其数学模型,最后对其特性进行了测定实验,得到了相应的指标,验证了测量原理的正确性。本文研制的测速发电机,无需通过换向器和电刷装置将测量电压输出,能够有效克服电刷接触电阻造成的非线性误差较大这一问题,有望得到推广和应用。
[1] 康葳,董田沼,杨国振,等. 基于角速度传感器的火炮调炮速度测量系统[J]. 计算机测量与控制,2012,20(9):2454-2456.
[2] 李江涛,杨殿阁,杨扬,等. 车辆导航系统横摆角速度传感器零点偏移的自动校正[J]. 汽车工程,2015,37(9):1065-1070.
[3] 张少强,李醒飞,吴腾飞,等. 磁流体动力学角速度传感器低频误差分析及校正方法研究[J]. 传感技术学报,2015,28(11):1634-1639.
[4] 赵影,朱荣,叶雄英,等. 微热对流角速度传感器抗冲击性能分析[J]. 传感技术学报,2008,21(4):628-631.
[5] 唐军,刘尧,刘俊,等. 基于飞蛾触角的仿生MEMS导航传感器的设计与仿真[J]. 传感技术学报,2012,25(5):561-565.
[6] 刘尧,唐军,刘俊,等. 基于蜜蜂平衡棒的仿生MEMS导航传感器的设计与仿真[J]. 传感技术学报,2012,25(10):1395-1399.
[7] 郝燕玲,刘博,史宏洋. 新型反相位驱动双解耦微机械陀螺设计[J]. 哈尔滨工业大学学报,2014,46(9):105-110.
[8] 杨勇. 测速发电机的工作原理与应用[J]. 信息技术与信息化,2014(9):157-158.
[9] 尚静,邹继斌,陆永平. 高精度直流永磁测速发电机输出纹波误差分析[J]. 哈尔滨工业大学学报,2003,35(1):93-96.
[10] 梁卫东. 印制绕组直流测速发电机及其测试[J]. 电工材料,2008,(1):40-42.
[11] 米永存,李省阁,吴海英. 电刷宽度对测速发电机纹波系数的影响[J]. 微电机,2011,44(10):1-4.
[12] 赵章吉. 交流感应测速发电机产生误差的原因探析[J]. 制造业自动化,2009,31(8):59-60.
[13] 郭农生,朱虹钤. 交流测速发电机轴误差电压的测量方法[J]. 微电机,2004,37(2):43-45.

赵 浩(1983-),男,讲师,主要研究方向为新结构传感器的设计、旋转机械与传动系统振动特性分析及抑制方法研究。主持浙江省自然科学基金、浙江省教育厅科研项目和嘉兴市科技计划项目等多项课题,在Sensors、REV SCI INSTRUM、J VIBROENG和传感技术学报、计量学报等期刊上发表多篇论文,zhaohao204@163.com。
A Novel Brushless Tachogenerator Based on Hall Effect*
ZHAOHao*
(Nanhu College of Jiaxing University,Jiaxing Zhejiang 314001,China)
For the output characteristic linear error of the DC tachogenerator is obvious,a novel brushless tachogenerator based on hall effect is presented. The tachogenerator is composed of three parts:outer stator with permanent magnet steelrotor and inner stator with hall sensor,a constant magnetic field is produced by permanent magnets in outer stator,then inductive current in rotor is generated by the cup rotor cutting constant magnetic field,and the magnetic fields generated by induced current have effects to hall element in the inner stator,finally,the hall voltage which is proportional to the instantaneous ratation angular velocity of cup rotor is received. Mathematical models of the tachogenerator are deduced in this paper,including output characteristic and transfer function. The characteristic determination test of tachogenerator was carried out,the results show that the sensitivity coefficient of the tachogenerator is about 61.1 mV/(rad/s),and the linear error is about 0.17%.
instantaneous ratation angular velocity;hall effect;mathematical models;characteristic determination test
项目来源:嘉兴市科技计划项目(2016AY13006);浙江省自然科学基金项目(LQ14E050007);嘉兴学院南湖学院重点科研项目(N41472001-9)
2016-09-08 修改日期:2016-11-20
TP393
A
1004-1699(2017)03-0467-04
C:7230
10.3969/j.issn.1004-1699.2017.03.022
猜你喜欢
科学技术创新(2021年13期)2021-05-16
防爆电机(2020年4期)2020-12-14
微特电机(2019年1期)2019-02-25
机电工程技术(2018年9期)2018-10-09
童话王国·文学大师班(2017年6期)2017-07-10
中学生数理化·高一版(2017年3期)2017-07-08
微特电机(2017年10期)2017-05-15
火控雷达技术(2016年1期)2016-02-06
太空探索(2015年6期)2015-07-12
中国铁道科学(2015年4期)2015-06-21
