
穿舱路径对空间站内航天员定向任务绩效影响的仿真试验研究
2017-04-11 01:05郭俊鹏姜国华刘玉庆胡福超
载人航天 2017年2期
郭俊鹏,姜国华,刘玉庆,安 明,胡福超
(1.中国航天员科研训练中心人因工程重点实验室,北京100094;2.中国航天员科研训练中心,北京100094)
穿舱路径对空间站内航天员定向任务绩效影响的仿真试验研究
郭俊鹏1,2,姜国华1,2,刘玉庆1,2,安 明1,2,胡福超1
(1.中国航天员科研训练中心人因工程重点实验室,北京100094;2.中国航天员科研训练中心,北京100094)
航天员在空间站内的不同舱段间穿行时常常会遇到失定向的问题。为了探究不同穿舱路径对航天员完成定向任务的影响,建立了多舱段的空间站虚拟环境,并开展试验,研究了不同穿舱路径中完成定向任务绩效的差异。结果表明:定向任务的绩效在不同种类的穿舱路径间具有显著差异,失重条件下运动方式的变化会造成定向任务绩效的下降。研究结果可以为航天员空间站内定向训练和空间站内导航辅助标识的设计提供参考。
空间站;虚拟仿真环境;空间定向;路径构型
1 引言
按照载人航天“三步走”的战略,我国未来将要建成长期有人照料的空间站[1⁃2]。与空间实验室相比,空间站具有更多的舱段数和更大的内部空间。当航天员在不同舱段间穿行时,由于重力的缺失和空间站的复杂结构,航天员往往难以形成对空间站多个舱段间方位关系的整体认知,从而难以做出正确的定向判断[3]。国外空间站运营的经验表明,航天员在空间站中的定向能力是关系到其日常工作效率以及紧急状况下空间站和航天员安全的重要技能[4⁃5],因此对航天员在空间站内定向任务的特点进行研究,开展飞行前的航天员空间站内定向训练是十分必要的。
失重环境中,航天员无法依赖前庭觉和本体觉确定竖直方位,只能依赖舱内环境中的视觉线索来进行“上”、“下”的区分[6],因此空间站的每一舱段通常都采用在各个舱壁上设置不同的视觉线索的方法来人为地建立舱段的局部视觉正向,帮助航天员形成天地方位感[7]。空间站各个舱段的局部视觉正向大部分都朝向同一方向,这一方向也定义了空间站的整体正向,但是由于空间站结构的限制,仍会有部分舱段以局部视觉正向和空间站的整体正向不一致的方式连接,这使得航天员在不同舱段间穿行时可能面临局部视觉正向的变化,从而使其定向判断更加困难[8]。研究不同的穿舱路径对航天员完成空间定向任务的影响,可以揭示失重环境中的空间定向特点,发现引起航天员定向困难的深层次原因,从而更有针对性地开展航天员飞行前的定向训练。
在地面上由于重力的限制,通常的实物训练模拟器难以模拟失重环境下空间站内多身体朝向、多舱段间的定向任务。虚拟现实技术则为解决这一问题提供了良好的途径[2,9⁃12]。利用虚拟现实技术,可建立仿真的空间站场景,模拟失重条件下只能依赖视觉线索进行定向判断的特点,在地面环境中为航天员提供以多种身体朝向在空间站虚拟环境中漫游的体验。本文基于建立的空间站虚拟环境,模拟航天员在不同舱段间穿行时的空间定向任务,进而通过试验研究分析了穿舱路径的变化对航天员空间站内定向任务绩效的影响。
2 空间站虚拟环境的建立与交互
为了能够充分研究不同穿舱路径对空间站内定向任务的影响,本文建立的空间站虚拟模型由11个舱段组成,包括两个核心舱、五个实验舱、两个节点舱、一个载人飞船和一个货运飞船。各个舱段的内部都具有丰富的视觉线索如图1所示,航天员在舱内可以依据这些视觉线索判断出舱段的局部视觉正向。所建立的各舱段的名称及构型外观如图2所示,各个舱段旁的箭头表示该舱段的局部视觉正向的方向。由于除了实验舱IV和实验舱V之外,其他各舱段都位于同一平面上,因此将该平面称为空间站的主平面。
利用建立的虚拟环境,可以模拟第一人称视角下的空间站内穿舱过程。由于失重条件下人的运动不再被限制在二维平面上,而是可以进行包括俯仰、滚转在内的六个自由度运动,因此为了模拟失重条件下的这一运动特点,采用六自由度的三维鼠标作为在虚拟环境中漫游的交互方式,图3即为三维鼠标及其对各个自由度上运动方式控制的示意图。
3 穿舱试验设计与实施
3.1受试者
试验中共招募了16名男性受试者(25.6±1.6岁),均为具有工科背景的研究生,之前没有过类似的空间站内穿舱任务经验。
3.2试验任务
本研究的主要目的是考察不同的穿舱路径对受试者完成空间定向任务的影响,因此既需要受试者能够完成在空间站虚拟环境中的穿舱过程,也需要设置合适的定向任务在穿舱过程结束后对受试者进行测试。穿舱过程中,受试者按照既定的路径利用三维鼠标进行操控即可,由于虚拟空间站的多舱段构型,每个节点舱处都连接有多个舱段,为避免受试者在穿舱过程中到达节点舱时无法自主确定下一个应该进入的舱段,本试验中为受试者提供了专门用于穿舱过程的路径构型,使受试者在节点舱处有且只有一个下一个能够进入的舱段,即受试者到达节点舱后,除去刚刚经过的舱段外,只能看到一个新的舱段的入口,而节点舱的其他舱门则处于关闭状态,受试者无法通过。通过这种方式,受试者可以自主地唯一确定下一个应该到达的舱段,而不必依赖外部的提示。按照这一思路选取的12种不同的穿舱路径的构型如表1所示,每一路径构型图片旁的符号“S”表明该路径中穿舱的起始舱段。该表不仅列出了用于穿舱的路径构型,还列出了每一路径包含的舱段数以及受试者在穿行过程中运动的控制方式。

表1 试验中选取的十二种穿舱路径及其相关参数Table 1 Twelve route configurations used in experiment and their parameters
在穿舱过程结束以后,受试者依据屏幕上的提示信息进行空间定向任务测试。试验设计了回指任务和路径重构任务作为对受试者定向判断进行考察的任务。回指任务是指受试者在到达穿舱过程的终点后需要回指穿舱过程起始舱段的位置,指向的方式为以受试者为中心,将全部空间划分为26个方向,这26个方向可以从水平和竖直两个维度进行描述:即从水平方向的维度、沿顺时针的顺利来说,有“正前”、“右前45°”、“正右”、“右后45°”、“正后”、“左后45°”、“正左”、“左前45°”这八个方向;这八个方向上,每个方向从竖直方向的维度来说,又有“斜向上”、“水平”和“斜向下”三种情况,比如对水平维度上的“右前45°”这一方向来说,可以有“右前45°斜向上”、“右前45°水平”和“右前45°斜向下”这三种不同的情况。因此,将水平维度上的8个方向和竖直维度上的3种方式进行组合,可以得到24个方位的指向,再加上“正头顶”和“正脚底”两个方位,即共有26种方位指向。对处于三维空间中的人而言,这26种方位指向涵盖了其他物体相对于自身所有可能存在的方位。但由于试验中需要受试者判断的目标方位不会出现“正头顶”和“正脚底”这两种情况,因此本试验的回指任务中只设置了24种可能的指向,受试者完成回指的过程为:首先根据屏幕上的提示信息按键选择目标方位在水平维度上的方位,之后再按键选择在竖直维度上的方位。通过这两个步骤即可完成对穿舱过程起始舱段方位的回指任务。
在回指任务之后,受试者需要完成路径重构任务。这一任务要求受试者在世界坐标系中通过按键选择,重构出穿舱过程中经历过的舱段之间的连接方式,这一任务考察了受试者对多个舱段间构型关系的理解能力。受试者完成路径重构任务的过程如图4所示,受试者通过选择相应的数字按键做出相邻舱段方位关系的判断,例如在图4(a)下,依次选择数字 4、1、6,则依次构建出(b)、(c)、(d)的路径。 需要注意的是,在这一任务中,节点舱并不计入在内。
试验在桌面式虚拟现实系统中进行。在正式试验前,向每名受试者提供三个用于熟悉三维鼠标操作和试验流程的练习任务,确保所有受试者经过练习后都能够熟练操作三维鼠标并正确理解试验流程。为了平衡穿舱路径顺序可能对试验结果造成的干扰,令一半的受试者按照表1中的编号1~12的顺序依次进行穿舱过程,而另一半的受试者按照编号12~1的顺序依次进行穿舱过程,在每种路径下受试者只完成一次穿舱过程和定向测试任务。试验中以受试者完成定向任务的准确度和反应时作为评价指标,对受试者完成空间定向任务的绩效进行评价,因此试验过程中记录了受试者完成回指任务的回答和反应时间以及路径重构任务的回答和反应时间。
4 试验结果分析
4.1试验结果的描述性统计
由于按照路径编号1~12顺序完成试验的8名受试者和按照路径编号12~1顺序完成试验的8名受试者间,在试验考察的绩效数据上并没有显著性差异,因此在试验数据的分析中将这两类受试者的试验数据放在一起进行分析。首先对全体16名受试者在12种不同路径下完成回指任务和路径重构任务的绩效进行了描述性统计。
1)回指任务的绩效统计
16名受试者在12种不同的穿舱路径下回指任务的回答错误个数和反应时间分别如图5和图6所示。由于共统计了16名受试者的数据,因此回指任务错误个数的上限即为16个。从图5中可以看出,受试者在不同路径下回指任务中的表现有所差异,在编号为3、7、10的三种路径下,回指任务错误的个数超过了受试者总数的50%,而在编号为1、2、5、12的四种路径下,仅有12.5%的受试者判断错误,在其他五种编号路径下判断错误的个数则分布在30%~50%之间。从完成任务的反应时的角度来看(图6),全部12种路径下完成回指任务的平均反应时为34.39 s,编号为3、4、6、7、10的五种路径下,受试者的平均反应时均超出这一平均值的30%以上;在第11号路径下的平均反应时虽然接近全体的平均值,但也超出了4.32 s;其他路径编号下的平均反应时则低于总体的平均反应时,其中在2号路径下的平均反应时还不到总体平均反应时的一半。
从反应时的时长可以看到,在到达路径的终点后再判断起始舱段的方位,并不是一个容易的过程,受试者完成这一任务需要花费的时间平均达到了30 s以上,说明受试者为了完成这一任务需要进行充分的思考,并不能通过直观印象来完成,这也印证了空间站内的定向任务确实具有一定的难度。
2)路径重构任务的绩效统计
对不同路径下的路径重构任务中受试者选择的错误数和平均反应时进行统计,得到的结果分别如图7和图8所示。从图7中可以看到,全部16名受试者在不同的路径下对路径重构任务判断错误的个数在0到6之间分布。与回指任务相比,路径重构任务的错误个数明显减小,而且不同路径下路径重构任务错误个数的分布模式和回指任务的错误个数分布模式明显不同。这也印证了这两类任务考察的是不同类型的空间关系的认知,路径重构任务重点在于考察受试者在世界坐标系中对舱段间结构关系的认知;而回指任务则重点考察受试者在自我中心的坐标系中对舱段间方位关系的认知。
路径重构任务反应时的分析中,考虑到不同路径包含的舱段个数不同,而需重构的舱段个数可能会对反应时造成影响(舱段数多的路径完成路径重构任务的时间长),因此对重构任务中的反应时按舱段数取平均能够从一定程度上消除不同路径中舱段数不同的影响。由此得到的按路径中舱段数取平均后的重构任务反应时如图8所示。
从以上各项定向任务绩效指标的分析中可以看到,在各项指标中都存在部分路径的绩效指标明显优于或劣于其他指标的情况,这说明穿舱路径确实会对空间定向任务造成影响,但是不同路径的哪些特点造成的定向绩效间的差异却需要进行进一步的分析。
4.2不同穿舱路径下定向任务绩效的分类比较
本小节在上一小节对试验结果描述性统计的基础上,对12种穿舱路径的特点进行分析,并将这些穿舱路径归纳为不同的类别,进而分析了不同类别间定向任务绩效的差异。
在三项任务的绩效指标中,受试者在编号为1、2、5、12的四种路径下的定向任务都有相对较好的绩效。由表1中列出的各个路径的属性可以看到,这四种路径中的各个舱段都位于同一个平面内,受试者在其中穿行时只需要进行平移和偏航的运动控制,而不需要进行俯仰或滚转的运动控制,这与地面重力环境中的运动方式类似,为了便于后文的叙述,将这四种路径称为A类路径。在编号为4、8、9、11的四种路径中,受试者需要经过若干次的俯仰才能够完成穿舱过程,但是到达终点舱以后,不需要进行进一步的姿态滚转来调整自身的朝向和舱段的局部视觉正向一致,将这四种路径称为B类路径。在编号为3、6、7、10的四种路径中,受试者在穿舱过程中不仅需要经过若干次的俯仰运动,在到达终点舱后还需要进行90°或180°的滚转来将自身的朝向和舱段的局部视觉正向调整一致,将这四种路径称为C类路径。
将回指任务中的错误个数和反应时间、重构任务中的错误个数和舱段平均反应时间作为因变量,以路径的种类为自变量,对全部16名受试者的数据采用单因素方差分析的方法来比较不同种类路径下的绩效差异。在进行方差分析之前首先对受试者的各项绩效数据进行正态性和方差齐性检验,检验结果表明各项绩效数据满足正态性和方差齐性的要求,可以适用于方差分析。方差分析的结果如表2所示,从该表中可以看到,以0.05的显著性水平作为标准,回指任务的错误个数和反应时指标组间差异显著(方差分析结果分别为 F(2,9)=32.318,p<0.001;F(2,9)=24.270,p<0.001),路径重构任务的舱段数平均反应时指标组间差异显著(F(2,9)=5.702,p<0.05),但是路径重构任务的错误个数指标组间的差异不显著(F(2,9)=3.432,p>0.05)。
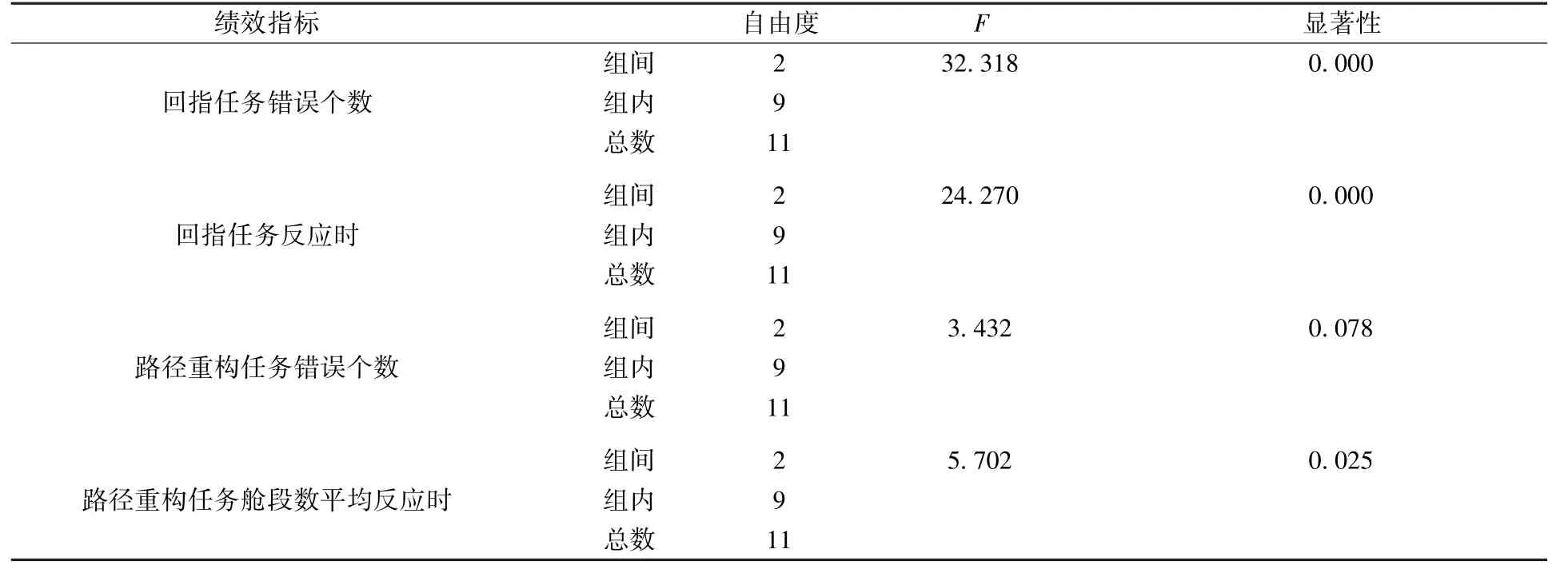
表2 定向任务绩效按路径种类的方差分析结果Table 2 The ANOVA of orientation task performances by the type of route configurations
对不同路径种类下的各个指标进行两两差异比较,结果如表3所示。从表中可以看到到,B类路径在回指任务的错误个数和反应时指标、路径重构任务的舱段数平均反应时指标上都显著高于A类路径,在路径重构任务错误个数指标上和A类路径的差异不显著;C类路径在回指任务的错误个数和反应时指标、路径重构任务的舱段数平均反应时指标上都显著高于B类路径,也显著高于A类路径,但是在路径重构任务错误个数指标上只显著高于A类路径,和B类路径间没有显著性差异。各项绩效指标数值越高说明受试者完成的绩效越差,因此在这三类路径中,综合来看,C类路径受试者的绩效最差,A类路径受试者的绩效最优,B类路径的绩效介于两者之间。这一结果也与三类路径中穿行过程的难度一致:在A类路径中,受试者的运动方式和地面类似,路径中的各个舱段都位于同一个平面内,受试者不需要进行俯仰和滚转;在B类路径中,受试者需要经过俯仰运动进入其他舱段,但是到达终点舱后不需要进行滚转来调整身体朝向;而C类路径中,需要受试者进行俯仰运动,在到达终点舱段后还需受试者进行滚转运动来调整身体姿态。不同类别的路径间这种运动方式的差异,可能是造成其定向任务绩效间差异的原因。
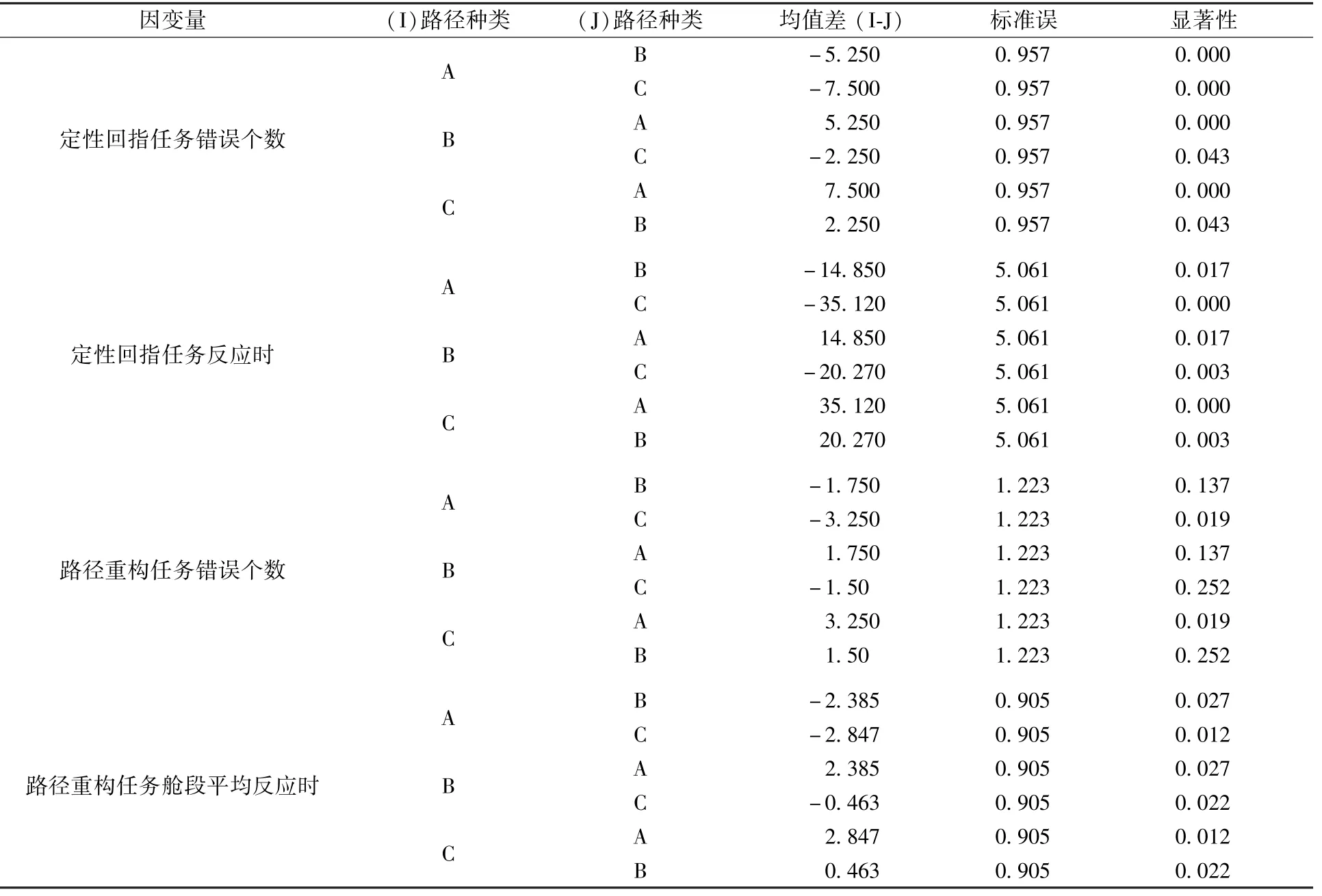
表3 穿舱路径试验结果方差分析的多重比较结果Table 3 Multiple comparison of ANOVA of route configuration experiments
5 讨论
空间站的多舱段结构决定了航天员在其中生活和工作时需要在不同的舱段间穿行,并可能需要在穿行的过程中判断其他舱段所在的位置,但是在空间站中由于重力的缺失和舱段间局部视觉正向的不一致,航天员常常会进行方式更加多变的运动过程,能够进行包括俯仰、滚转在内的六个自由度上的运动。这些新的自由度带给了航天员在地面上未曾经历过的空间关系变换方式,由此可能会对定向任务带来不利的影响。本试验的结果也验证了这一可能性,当穿舱路径中的舱段全部都位于同一个平面内时,受试者能够很好地完成空间定向任务;而当舱段位于不同的平面上时,受试者完成定向任务的能力则明显下降。Mou等[13⁃15]的研究曾指出,在地面重力环境中,人的空间认知能力会受到物理空间中的“边界”的影响,基于这些“边界”划定的范围,人在某一局部范围内对空间关系的判断通常会优于跨越这些范围之间的方位关系的判断。受到这一 “边界”理论的启发,可以将空间站的多个舱段进行不同“边界”和“范围”的划分。基于试验研究的结果,空间站结构中“边界”应该定义在位于空间站主平面上的舱段和与空间站主平面竖直连接的舱段之间,虽然该“边界”并不实际存在,但是当航天员的运动跨过这一“边界”时,其完成空间定向任务的能力却会有明显的下降,因此当航天员在进行跨“边界”的运动时需要对相关的空间关系给予特别的关注,以免迷失方向。
对受试者在定向任务中错误种类进行分析发现,受试者出现错误的首要类型是在进行俯仰或滚转运动时,没有正确更新周围环境相对于自身的空间关系。以图9所示的情况为例,当受试者在从核心舱I进入实验舱V的时候,由于其进行了俯仰运动,周围物体的空间关系发生了相应的变换,在判断起始舱段的方位关系时需要结合这一变换进行考虑,否则就会把本应位于自身“正后方斜向上”方位中的舱段(图9(a))误判为位于自身“正后方斜向下”(图9(b)),而如果俯仰运动之后又叠加滚转运动时,受试者在进行空间方位判断时就会更加困难,这也是在甲乙丙三类路径中受试者的绩效依次下降的原因。
6 结论
本文基于建立的空间站虚拟环境开展试验,研究了在空间站内不同舱段间的穿行过程中,穿舱路径对定向任务绩效的影响,研究发现在需要进行俯仰、滚转等方式的穿舱路径中,人对空间方位的正确判断会更加困难、更容易出现错误。
本研究的成果可以为航天员飞行前的空间站内定向训练和空间站内导航辅助标识的设计提供参考。在空间站内定向训练中应当更多地关注航天员在进行俯仰、滚转等运动之后的方位判断能力;在空间站内导航标识的设计中,针对某些更容易出现方向迷失的舱段应更有针对性地设计相关的导航标识,来帮助航天员更加准确高效地完成定向任务。
(References)
[1] 陈善广,陈金盾,姜国华,等.我国载人航天成就与空间站建设[J].航天医学与医学工程,2012,25(6):391⁃ 396. Chen Shanguang,Chen Jindun,Jiang Guohua,et al.Achieve⁃ments of manned space program and construction of space sta⁃tion in China[J].Space Medicine&Medical Engineering,2012,25(6):391⁃396.(in Chinese)
[2] 姜国华,刘玉庆,朱秀庆,等.虚拟现实技术在空间站舱内定向训练中的应用[J].载人航天,2015(2):115⁃120. Jiang Guohuo,Liu Yuqing,Zhu Xiuqing,et al.Application of virtual reality in spatial orientationtraining for space stationp[J].Manned Spaceflight,2015(2):115⁃120.(in Chinese)
[3] Zhu X,Liu Y,Zhou B.Design of a virtual training system and application of an evaluation scheme for orientation in a spacecraft cabin[C]//Proceedings of the Proceedings of the 15th International Conference on Man⁃Machine⁃Environment System Engineering,Springer,2015:653⁃661.
[4] Oman C.Spatial Orientation and Navigation in Microgravity[M].Spatial processing in navigation,imagery and percep⁃tion.Springer,2007:209⁃247.
[5] Clément G,Reschke M F.Neuroscience in Space[M]. Springer Science&Business Media,2010.
[6] Oman C M.Human Visual Orientation in Weightlessness[M].Levels of perception.Springer.2003:375⁃398.
[7] Zhu L,Yao Y,Xu P.Study on space station design elements for intra⁃vehicular navigation:A survey[C]//Proceedings of the Electronic and Mechanical Engineering and Information Technology(EMEIT),2011 International Conference on,IEEE,2011:4493⁃4496.
[8] Aoki H,Ohno R,Yamaguchi T.The effect of the configura⁃tion and the interior design of a virtual weightless space station on human spatial orientation[J].Acta astronautica,2005,56(9):1005⁃1016.
[9] 李孟钰,周岩.基于VR技术的空间站舱内寻路模拟系统的设计与研究[D].哈尔滨工业大学,2013. Li Mengyu,Zhou Yan.Design and Research of theWayfind⁃ing Simulation Systemin Craft Cabin Basedon Virtual Reality Technology[D].Harbin Institute of Technology,2013.(in Chinese)
[10] Aoki H,Oman C M,Natapoff A.Virtual⁃reality⁃based 3D navigation training for emergency egress from spacecraft[J]. Aviation,space,and environmental medicine,2007,78(8):774⁃783.
[11] Aoki H,Yamaguchi T,Ohno R.A study of orientation in a zero gravity environment by means of virtual reality simulation[C]//Proceedings of the Space Technology and Applications International Forum⁃2001,AIP Publishing,2001:29⁃34.
[12] Aoki H,Oman C M,Buckland D A.Desktop⁃VR system for preflight 3D navigation training[J].Acta astronautica,2008,63(7):841⁃847.
[13] Mou W,Wang L.Piloting and path integration within and across boundaries[J].Journal of Experimental Psychology:Learning,Memory,and Cognition,2015,41(1):220.
[14] Mou W,Zhou R.Defining a boundary in goal localization:Infinite number of points or extended surfaces[J].Journal of Experimental Psychology:Learning,Memory,and Cognition,2013,39(4):1115.
[15] Mou W,McNamara T P.Intrinsic frames of reference in spa⁃tial memory[J].Journal of Experimental Psychology:Learn⁃ing,Memory,and Cognition,2002,28(1):162.
(责任编辑:康金兰)
Simulation Research on Effects of Route Configuration on Spatial Orientation Task Performance of Astronauts inside Space Station
GUO Junpeng1,2,JIANG Guohua1,2,LIU Yuqing1,2,AN Ming1,2,HU Fuchao1
(1.National Key Laboratory of Human Factors Engineering,Beijing 10094,China;2.China Astronaut Research and Training Center,Beijing 100094,China)
Disorientation is one of the major problems that astronauts usually met when navigating across different modules inside a space station within various routes.To explore the role of route con⁃figuration in completing the spatial orientation tasks,a simulated virtual multi⁃module space station was established and an experiment was conducted.The results showed that the performances of the spatial orientation tasks varied significantly among the different types of the configuration of the routes.The change of movement model caused by weightlessness could lead to the decrease in the o⁃rientation task performances.The findings may contribute to the spatial orientation training and the design of the navigation aid system.
space station;simulated virtual environment;spatial orientation;route configuration
TP391.9
:A
:1674⁃5825(2017)02⁃0258⁃08
2016⁃03⁃31;
2017⁃01⁃25
国防基础科研计划(B1720132001);人因工程重点实验室基金资助(SYFD140051807)
郭俊鹏,男,硕士,研究实习员,研究方向为航天飞行训练模拟技术。E⁃mail:dragonguo@126.com
猜你喜欢
装备环境工程(2022年4期)2022-05-06
太空探索(2022年3期)2022-03-28
幼儿园(2021年12期)2021-11-06
国际太空(2021年8期)2021-11-05
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
舰船科学技术(2018年7期)2018-07-25
运动(2016年7期)2016-12-01
小学生时代·大嘴英语(2015年7期)2015-11-23
体育师友(2011年5期)2011-03-20
