
基于结构森林边缘检测和Hough变换的海天线检测
2017-04-10 02:54徐良玉马录坤谢燮彭艳彭艳青崔建祥
上海大学学报(自然科学版) 2017年1期
徐良玉,马录坤,谢燮,彭艳,彭艳青,崔建祥
(1.上海大学机电工程与自动化学院,上海 200072;2.中国人民解放军理工大学理学院,南京 210007)
基于结构森林边缘检测和Hough变换的海天线检测
徐良玉1,马录坤1,谢燮1,彭艳1,彭艳青2,崔建祥1
(1.上海大学机电工程与自动化学院,上海 200072;2.中国人民解放军理工大学理学院,南京 210007)
海天线是海面环境图像所具有的重要特征之一,海天线的检测对划分海空、海界区域以及目标检测有重要作用.提出了一种结合结构森林快速边缘检测和概率Hough变换的海天线检测方法.首先通过高斯低通滤波来减小海面浪纹、光照反射等局部纹理影响,然后使用已完成训练的结构化随机森林为每个像素贴上边缘标签——二值化,最后通过Hough变换原理拟合海天线.实验结果表明,该方法可以较好地忽略局部干扰边缘,强化边界提取,对复杂海天背景下的海天线检测具备鲁棒性和高准确性.
海天线检测;结构化随机森林;决策树;边缘检测;Hough变换
视觉传感器是无人化平台感知环境的主要传感器之一.无人机、无人测量平台也需要搭载相机,与激光、超声传感器等互相补充,以感知海面环境,实现航行中自主安全避障和3维环境感知.而目标检测是无人机实现自主避障、跟踪目标等自主功能的核心模块之一.由于无人机在实行上述自主功能时对实时性的要求较高,且一些目标检测算法计算量较大,故对于目标检测而言,减小计算量、提高运算速度和效率是关键.
海天线是海面环境图像的重要特征之一.在空间上将图像划分为3个部分:天空、海界线和海面(见图1).而自然环境中天空区域连续分布的云层、海界线区域复杂的背景轮廓、海面区域的浪纹都会对海界线检测造成干扰,可能会导致海天线检测结果的偏差.对于无人水面艇、舰船而言,影响其航行的障碍物主要在海天线以下,那么水面障碍物检测工作实际上就可以限制在海天线以下区域完成,因此对海天线的有效提取不仅可以减少图像中的干扰信息,而且还可以降低处理算法的时间消耗,有利于后续目标检测方法的计算,实现对目标的精确检测.
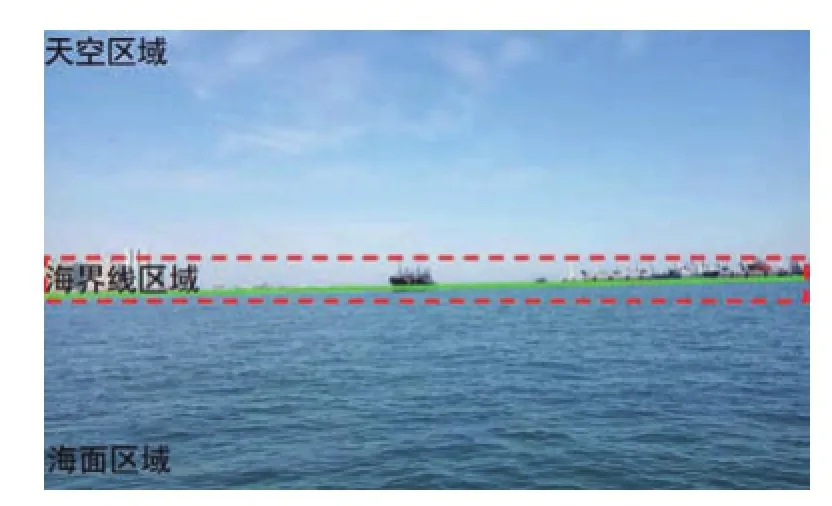
图1 海空背景图像区域划分Fig.1 Area partition of sea-sky background image
目前,国内外有许多学者对海天线的检测算法进行了研究.Zou等[1]提取了边缘的梯度方向信息进行辨识,提出了一种基于剪切波变换的海天线检测算法;梁世花等[2]将Seam Carving原理应用到图像中来检测最高能量线,并通过计算图像中各点的梯度幅值,搜索最高能量线以实现海天线检测;王博等[3]首先计算梯度显著性以增强海天线的直线特征,然后采用区域生长的方法实现了海天线的检测;安博文等[4]在进行梯度运算后使用Ostu阈值分割获取海天边缘信息,并根据Hough变换检测海天线;苏丽等[5]针对全景海域图像海天线呈近似圆形的特点,提出了一种基于分形维数和改进Hough圆变换的全景海天线提取方法;董宇星等[6]采用Canny算子检测边缘结合Hough变换检测海天线,但是Canny算子易受海面水波浪纹影响,检测效果不佳;Tang等[7]提出了一种基于Radon变换的海天线检测方法;Wang等[8]使用Sobel算子计算出列方向上梯度的极大极小值,再用RANSAC方法对这些点进行直线拟合,实现海天线检测.上述算法大多是利用梯度特征计算来实现海天线的提取,但是由于海面环境极其复杂,云层、复杂背景、海面水花、水波浪纹都会对图像梯度形成干扰,造成检测结果的偏差.
本工作提出的基于结构森林算子和Hough变换的海天线检测方法可以有效地剔除云层、浪纹等对复杂海天背景下海天线检测的边缘干扰,实现高鲁棒性、高准确性.
1 图像预处理
图像滤波是一种图像增强技术,其目的是改善后续的边缘检测、分割等处理效果.滤波算法可以分为锐化和平滑两种,其中锐化算法是经高通滤波,保留图像的高频部分(在频域中一幅图像的高频部分代表了图像的细节、纹理信息),因此锐化算法使得图像的细节增强,提高了分辨率.平滑算法是经低通滤波,使图像低频部分不受影响(在图像频域中低频部分代表了图像的轮廓信息),故使用平滑算法可以降低图像分辨率,模糊细节纹理,较好地保留边缘.
本工作通过用高斯平滑滤波对海空背景图像进行预处理,目的是降低图像分辨率,减少云层、海面水花浪纹等细节干扰边缘,从而较好地保留边界信息.
高斯平滑滤波器是根据高斯函数的形状来选择权值的线性平滑滤波器,实际应用较为广泛.在图像处理领域中,2维零均值离散高斯函数常用作平滑滤波器(见图2),

式中:u,v为图像中的横向、纵向像素值;σ为正态分布的标准偏差,在2维空间中式(1)生成的曲面的等高线是从中心开始呈正态分布的同心圆.

图2 2维高斯函数分布Fig.2 2D Gaussian function distribution
高斯平滑滤波器的每个像素的值都是周围相邻像素值的加权平均,原始像素的值有最大的高斯分布值,权重最大;相邻像素距离原始像素越远,其权重越小.这样进行模糊处理比其他的均衡模糊滤波器能更好地保留边缘效果.
设对于M×N的图像{f(i,j)}和m×n的模板{w(s,t)},在图像的任意一点(x,y),滤波器的响应为滤波器系数与由该滤波器包围的图像像素的乘积之和:

式中,m=2a+1,n=2b+1,通常取a=b且a为正整数.
高斯卷积过程如图3所示,其中σ=1,高斯核为5×5时权重矩阵w(s,t)与原始图像f(x,y)卷积,得到输出平滑图像G(x,y),


图3 高斯卷积核卷积过程Fig.3 Gaussian kernel convolution process
2 核心算法设计
2.1 结构森林快速边缘检测
结构森林边缘检测的核心为随机决策森林的训练.先通过训练一个随机决策森林,再向已完成训练的决策模型输入x∈X(其中x为像素块,X为由x组成的一幅图像)后得到对应的分类结果y∈Y.
2.1.1 训练决策森林
对于单棵树ft(x),给定训练集合Sk⊂X×Y,根据信息增益(Ij)最大原则确定节点分离函数,


式中,H(S)为香农熵,py为训练数据Sj中带有标签y的概率.
单颗决策树容易出现不稳定和过拟合的情况[9],通过训练多棵不相关的树组合成森林Ft(x)可以较好地解决这个问题.输入随机抽样的像素块x或特征类别作为训练数据可以提高决策森林的准确率(见图4).

图4 决策森林训练模型Fig.4 Decision forest training model
2.1.2 随机森林结构化输出
由于标签集合Y中的每个结构标签y有一定的相似度,故根据式(6)和(7),信息增益Ij依靠度量结构标签y的相似度来计算,这样会导致不易定义Ij.为了方便计算Ij,给定节点j,将该节点上的所有标签y离散化映射到离散化标签c,便可用c代替y计算Ij:

本工作采用文献[9]的二阶映射将标签y的相似度离散化映射到离散化标签c.先定义映射π:y →z将具有标签y的像素块编码为二元向量,在Z中计算z之间的欧氏距离以区分具有相似标签y的像素块是否属于同一分割.为了降低计算量,在Z中取m维特征形成低维映射π:φ:Y →Z.再定义π:φ:Z →C,采用主成分分析(principal component analysis, PCA)降维量化,根据z所在的具体象限给定具体标签C(1,2,…,k),这里取k=2.
本工作采用BSDS500数据集[10]作为训练数据.通过上述过程训练结构森林边缘检测模型后输入RGB图像进行边缘检测.
2.2 二值化
完成训练和边缘检测后,本工作设定阈值为90,将图像上的像素点的灰度值二值化为0和255,使整个图像呈现出黑白效果,得到仍然可以反映图像整体和局部特征的二值化图像.
2.3 概率Hough变换拟合直线
Hough变换利用图像的全局特征连接特定形状的边缘形成连续平滑的边缘,通过将原图像上的点映射到用于累加的参数空间,实现对已知解析式曲线的识别.由于利用了图像全局特性,因此受噪声和边界间断的影响小,鲁棒性好,常用于直线识别.这条直线在图像中是一系列离散点的集合,故可通过离散极坐标公式表示:

由于每个像素点的坐标值I(x,y)是已知的,因此根据像素点坐标(x,y)的值绘制每个(ρ,θ)值就完成了图像笛卡尔坐标系统到极坐标Hough空间系统的转换(见图5).
输入已经检测到的边缘点,假设点(x0,y0),(x1,y1),(x2,y2)为3个输入的边缘点.极坐标下,在极径极角平面中绘制出所有经过这3个点的直线,得到一条正弦曲线(见图6).由点-正弦曲线对偶性质得若干条曲线相交于(x0,y0),则(x0,y0)对应的(ρθ0,θ0)所表示的直线ρθ0=xcosθ0+y sinθ0由越多输入边缘点组成,这个方程所表示的直线为目标直线的可能性就越大.可以通过设置直线上点的阈值来定义多少条曲线交于一点才认为是检测到了目标直线.

图5 Hough变换原理Fig.5 Hough transform principle
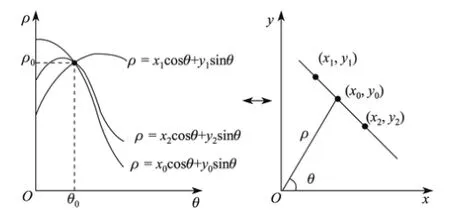
图6 概率Hough变换直线检测原理Fig.6 Linear detection principle of probabilistic Hough transform
3 实验结果与分析
本算法流程框架如图7所示.

图7 算法框架Fig.7 Algorithm framework
实验视频序列由无人水面艇机载设备采集,经图像金字塔降采样后图像尺寸为640×480.本工作使用的调试平台为VS2013+OpenCV3.0.0,系统环境为Windows 8,内存大小为8 GB.
图8和9给出了一些异常复杂干扰背景下的样本图像实验结果,如水面水纹浪花影响、海界线附近高纹理楼宇/山、光照、水面反射、雾天影响等.图8中,(a)为原图;(b)为未经高斯滤波使用Canny算子得到的边缘图,可以看到干扰信息严重;(c)为经高斯滤波后使用Canny算子得到的边缘图,可以看出经滤波后边缘干扰显著降低,但还是存在较为严重的干扰边缘; (d)为经高斯滤波后结构化随机森林边缘检测得到的轮廓图,对比(c)可看出干扰边缘明显降低,只剩下极少的干扰;(e)为在(d)的基础上二值化的结果,可以看出干扰信息大多被剔除,只剩下海天线轮廓和海天线上的一些目标轮廓;(f)为经概率Hough变换拟合海天线后的结果,显示已精确检测到海天线.
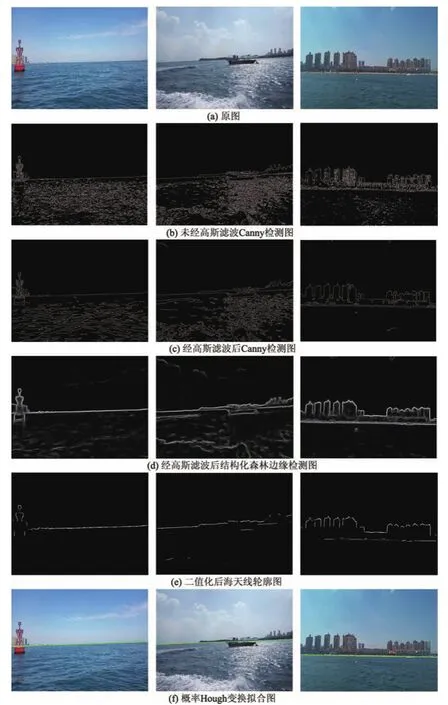
图8 复杂环境下海天线检测结果Fig.8 Detection results of sea-sky-line in complex environments

图9 复杂环境下海天线检测结果对比Fig.9 Comparisons of sea-sky line detection results in complex environment
对于分辨率为640×480的图像,本算法平均运算时间为87 ms/帧,具有很好的实时性.实验结果表明,本算法能较好地检测出海天线,且实时性和鲁棒性较好,准确度较高,能够有效应对各种复杂环境和复杂天候影响.图9为更多典型复杂干扰背景下的样本图像实验结果,并与Canny原理海天线检测算法[6]以及RANSAC直线拟合方法[8]进行了对比,本算法均取得良好的检测效果.
4 结束语
本工作提出了一种结合结构化随机森林快速边缘检测和概率Hough变换的海天线检测方法.本算法首先通过高斯滤波进行预处理,然后使用已完成训练的结构化随机森林给每个像素贴上边缘标签,再将结果二值化,最后通过累计概率Hough变换拟合出海天线.实验结果表明,本算法快速高效,实时性好,能够较好地检测出海天线,且鲁棒性较好,准确度较高,能够有效应对各种复杂环境和复杂天候影响,为下一步的目标检测和识别提供了良好的基础.
[1]ZOu R B,SHI C C.A sea-sky line identifcation algorithm based on shearlets for infrared image[J].Advanced Materials Research,2014,846/847:1031-1035.
[2]梁世花,吴巍,李波,等.基于Seam Carving的海天线检测算法[J].红外与激光工程,2013,42(10): 2817-2821.
[3]王博,苏玉民,万磊,等.基于梯度显著性的水面无人艇的海天线检测方法[J].光学学报,2016(5): 66-75.
[4]安博文,胡春暖,刘杰,等.基于Hough变换的海天线检测算法研究[J].红外技术,2015,37(3): 196-199.
[5]苏丽,庞迪.全景海域图像中的圆形海天线提取[J].光学精密工程,2015,23(11):3279-3288.
[6]董宇星,刘伟宁,王爽.基于Canny原理海天线检测算法研究[J].计算机测量与控制,2010,18(3): 697-698;702.
[7]TANG D,SuN G,WANG D,et al.Research on infrared ship detection method in sea-sky background[J].Proceedings of SPIE—The International Society for Optical Engineering,2013, 8907(2):165-189.
[8]WANG H,WEI Z,WANG S,et al.A vision-based obstacle detection system for unmanned surface vehicle[C]//Proceeding of the 2011 IEEE Conference on Robotics,Automation and Mechatronics.2011:364-369.
[9]DOLL´AR P,ZITNICK C L.Structured forests for fast edge detection[C]//IEEE International Conference on Computer Vision(ICCV).2013:1841-1848.
[10]ZHu S J,ZHAO J Y,GuO L J.Rival penalized image segmentation[J].Journal of Multimedia, 2014,95:736.
Sea-sky line detection based on structured forests edge detection and Hough transform
XU Liangyu1,MA Lukun1,XIE Xie1,PENG Yan1, PENG Yanqing2,CUI Jianxiang1
(1.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China; 2.College of Sciences,PLA University of Science and Technology,Nanjing 210007,China)
The sea-sky line is an important feature in the sea-surface environment image, and detection of the sea-sky line is essential in dividing the sea and sky,and detecting the coastline area and objects.This paper provides a method to detect the sea-sky line using structured forests edge detection and Hough transform.The method uses a Gaussian low-pass flter to reduce the infuence of regional textures such as wave texture and light refection.A trained structured random decision forest is then used to label each pixel, and binarize it to determine whether it belongs to an edge or not.Hough transform is used to ft the sea-sky line more accurately.Experimental results show that this method can neglect clutter edge,greatly improve edge detection,and efectively extract sea-sky lines from a complicated sea-sky background with high robustness and accuracy.
sea-sky line detection;structured random forest;decision tree;edge detection; Hough transform
TP 242.62
A
1007-2861(2017)01-0047-09
10.3969/j.issn.1007-2861.2016.07.018
2016-12-29
国家自然科学基金资助项目(61403245);上海市自然科学基金资助项目(13ZR1454300);上海市科委能力建设资助项目(14500500400)
彭艳(1982—),女,副教授,研究方向为无人艇导航和控制及其总体技术.E-mail:pengyan@shu.edu.cn
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
车迷(2018年11期)2018-08-30
海峡姐妹(2018年3期)2018-05-09
通信产业报(2016年44期)2017-03-13
公民与法治(2016年10期)2016-05-17
电影故事(2015年16期)2015-07-14
少儿科学周刊·少年版(2015年2期)2015-07-07
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
