
一种海水采样对接传输装置的设计
2017-04-10 02:54杨超郭伟其金左文杨毅李小毛刘明确彭艳
上海大学学报(自然科学版) 2017年1期
杨超,郭伟其,金左文,杨毅,李小毛,刘明确,彭艳
(1.中国船舶工业系统工程研究院,北京 100036;2.国家海洋局东海海洋环境调查勘察中心,上海 200137; 3.国家海洋局东海分局,上海 200137;4.上海大学机电工程与自动化学院,上海 200072)
一种海水采样对接传输装置的设计
杨超1,郭伟其2,金左文3,杨毅4,李小毛4,刘明确4,彭艳4
(1.中国船舶工业系统工程研究院,北京 100036;2.国家海洋局东海海洋环境调查勘察中心,上海 200137; 3.国家海洋局东海分局,上海 200137;4.上海大学机电工程与自动化学院,上海 200072)
为解决采样海水从吊放式采水器到储存分配系统对接传输问题,根据海水取样要求,提出了一套海水从采水器到分配储存系统的对接传输装置设计方案.对接传输装置由上定对接头和下对接座组成,其中上定对接头的导向爪组与下对接座的锥钢套采用杆锥方式的粗对接,以补偿上定对接头滑套中心底锥孔与下对接座导向锥管的二次精对接定位误差,降低其定位精度要求.这样,从机械结构上保证了采水器到分配储存系统的海水偏心流道的O形密封圈装配要求.为了消除对接过程中各种变差对系统的影响,该装置采用了弹簧阻尼减震,再配以波纹管柔性连接补偿轴向位移及径向偏心,目的是为延长装置寿命.基于SolidWorks Motion仿真还原了整个对接系统定心过程,揭示了装置中各种变差对系统的影响.再基于SolidWorks Simulation仿真了导向爪组在对接过程中的受力状态,验证了整个装置结构设计的合理性.
海水采样;自动释放对接;O形密封;弹簧阻尼减震;波纹管补偿
随着海洋环境对人类生活影响的认识不断加深,海洋环境监测问题日益受到人们的重视,而作为海洋环境监测的一种手段,海水分层采样技术逐渐进入人们的视线.目前,国外学者在海水监测领域广泛运用了在线监测、集成化、智能化和网络化等技术.而我国作为发展中国家,海水环境监测技术手段还比较落后,自动化程度较低,现今广泛采用的方式还是实验技术员集体随大船出海,利用美国General Oceanics公司和意大利Idronaut公司研制的多通道水样采集器[1]采样并经人工加药冷藏保存后带回实验室检测.在海水监测点-线-面的发展趋势下,基于智能无人水面艇(unmanned surface vehicle,USV)移动平台的分层海水采样及分配储存技术的出现将改变我国海洋环境监测方面的点-线监测现状.该采水平台可以在高污染及高辐射等危险环境下,每天程序化地实现多个站点的分层海水采样并保存.海水采样装置主要包括吊放式采水器、自动海水对接传输装置、储存冷却系统、智能卷扬机、过滤系统等,其中自动海水对接传输装置主要完成海水从采水器到储存冷却系统的传输过程.由于受海洋作业条件、结构等方面的制约,传统对接机构已经不能满足需要,而国内相关的研究较少,故自动海水对接传输装置的研制具有重要的应用价值,将对海水化学分析意义重大.
自动海水对接传输装置由上定对接头和下对接座组成.下对接座底部中心引出的钢丝绳穿过上定对接头中心孔提升对接.在可靠对接时,会形成一条特殊的流道,该流道是由下对接座的法兰轴带环形槽的外轴面与上定对接头的特氟龙衬套内孔面通过上下O形密封圈形成的密闭偏心流道,海水通过该流道完成传输.根据实际作业情况,本工作提出粗对接[2-3]加二次精对接[4-5]的O形密封圈装配[6-7]手段以达成要求.为了消除对接过程中各种变差对系统的影响,本装置采用了弹簧阻尼减震,再配以波纹管柔性连接补偿轴向位移及径向偏心[8-9],目的在于延长装置寿命.并辅以SolidWorks Motion仿真模拟整个装置的对接定心装配过程,再利用SolidWorks Simulation对关键零部件导向爪的强度进行精确设计[10],以验证整个对接装置结构设计的合理性.
1 海水采样对接传输装置方案设计
1.1 对接传输装置总体方案设计
智能无人水面艇海水采样是在充分利用成熟的无人艇平台基础上,搭载吊放式采水器、采水器抱持装置、甲板采水支架、对接传输装置、智能水分配储存系统等(见图1).对接传输装置要完成的任务是将采水器分层采样的海水转接输送到水分配储存系统.由于采集的海水被用于化学分析,这就决定了该对接传输装置要完成的是一项十分复杂的作业过程.采用下对接座中心的钢丝绳穿过上定对接头中心孔提升对接,在上定对接头与下对接座可靠对接时,一条特殊的由抗腐蚀塑料材质构成的偏心密封流道将形成,该流道由下对接座的法兰轴带环形槽的外轴面与上定对接头的特氟龙衬套内孔面通过上下O形圈形成密闭的流道,海水通过流道完成分配,流道两端主要利用了O形圈的挤压作用完成密封.而O形圈的对接装配需要极高的轴心对中精度,为保证该中心对中精度,在上定对接头外周均布设4只压紧的导向爪,与下对接座的锥钢套碰触形成杆锥方式的粗对接.再辅以下对接座的导向锥管与上定对接头滑套底锥面孔连接形成二次精对接,达到O形圈的装配要求.

图1 智能无人水面艇海水采样设计图Fig.1 Design of seawater sampling for intelligent USV
根据海水采样及其他行业规范整理出的对接传输装置的设计还应满足如下原则:
(1)分层海水必须通过密封的塑料管路进行传送,避免金属的污染影响海水分析;
(2)必须经得住海水腐蚀,并且具有较高的强度和更长的使用寿命;
(3)进水口与出水口流道必须具有自密封功能,防止海水及空气污染;
(4)采用钢丝绳吊放,必须具有对接缓冲装置来保证使用寿命;
(5)下对接座随采水器上升,排除下对接座方位不确定的因素.
根据这些设计原则,对接装置的零件接触部分全部采用316L材质,弹簧阻尼减震,流道部分采用特氟龙材质.另外采用柔性波纹管缓解对接冲击,采用流道口自密封结构设计,对接方位自适应设计.
1.2 海水采样对接传输装置结构设计
图2为上定对接头与下对接座分开状态及对接状态图,图中固定在下对接座的钢丝绳穿过上定对接头中心孔向上提升.海水采样对接传输可分为3个对接过程,分别为分离态、粗对接态和精对接态.分离态是指上定对接头与下对接座通过放松钢丝绳分离,下对接座随采水器下到海底分层取水的状态,在该状态下流道的进出口有自密封作用;粗对接态是指被压紧的导向爪与下对接座的锥钢套碰触定心过程,借助弹簧阻尼减震及波纹管补偿消除对接过程中采水器受到外界的摇摆和振动等各种干扰;精对接态是指粗对接状态后,下对接座中心被限制在一个较小的范围内,通过滑套底孔与导向锥管对接引导到滑套直孔与导向锥管直轴端的公差精配合,保证上定对接头与下对接座中心形成一条精准的直线的过程,该过程能满足O形圈的安装精度要求.图3为对接传输装置粗对接细节图,图4为对接传输装置精对接状态图,图5为对接状态形成后的偏心流道细部图.
粗对接机构由围绕上定对接头的4个导向爪、4个转轴、4个压簧、4个压簧芯轴及4套锁紧螺母组成上对接杆系.对接时上对接杆系接触下对接座的锥钢套,上对接杆系的4个压紧的导向爪紧紧地抱紧下对接座的锥钢套四周,利用弹簧阻尼减震完成上定对接头与下对接座在复杂状态下的对中任务.上定对接头通过波纹管与甲板支架连接,波纹管的补偿可以起到纠偏定心及对接缓冲的作用(见图3).粗对接引导后面的精对接动作,精对接上定对接头中的滑套中心底锥与下对接座中心的导向锥管先导向对接,再过渡到滑套中心孔直段与导向锥管直段的公差配合对接.这时下法兰轴带4个O形圈可以顺利地装进特氟龙衬套内孔中,到位后位置传感器动作,采水器被抱持机构定位,密封流道回路形成,这时可以进行海水的对接传输(见图4).海水对接传输完成后钢丝绳放松,装置按照上述对接过程反向分离后可进行下一轮海水采集对接传输.
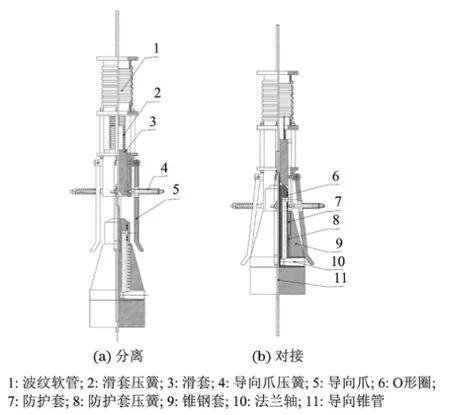
图2 对接传输装置分离状态及对接状态Fig.2 Docking device separation state and docking state

图3 对接传输装置粗对接细节图Fig.3 Primary docking status detail view

图4 对接传输装置精对接状态图Fig.4 Fine docking status detail view

图5 对接工作状态细部图Fig.5 Docking status detail view in working position
2 粗精对接机构的设计
2.1 对接机构导向爪压簧规格的选取
本装置采用6件压簧,压簧的正确设计对本装置起重要作用.6件压簧材质采用316L是为应对潮湿的海水工作环境.在6件压簧中,4件压紧导向爪用以完成上定对接头与下对接座的中心粗对接.粗对接的重要性在于要负责调整下对接座随采水器上升时的各种晃动及摇摆纠偏对中,如果压簧刚度太小(即纠偏作用力小),则不能起到调整中心的作用;如果作用力太大,而对接作用力也加大,则对装置的磨损及寿命影响很大,因此正确设计这4件压簧十分重要.滑套压簧的作用是在常态下使滑套处于最下位置,起出流道口的自密封作用[11],达到顶开时衬套内孔面较清洁的目的;同理,保护套压簧的作用是使保护套处于最上位置,起密封出流道口的作用,达到顶开时法兰轴上外轴面较清洁的目的.
由于滑套压簧及保护套压簧的作用是自密封及回位清洁表面,对整个对接装置起辅助作用,故选择较小作用力即可满足要求.根据压簧标准设计选型的几何尺寸如表1所示.

表1 滑套压簧及防护套压簧选用尺寸Table 1 Springs parameters used in slide sleeve and protective sleeve
由于导向爪压簧对整个对接装置完成对中十分重要,故对导向爪压簧进行4组参数对比,这4组参数都必须满足整个装置的安装要求.由于采水器下对接座被限制在无人艇中孔范围内[12](经计算其摆动角度小于等于3°,当钢丝绳提升速度为0.1 m/s、采水器及对接座质量为130 kg时),为此限定对接座偏摆在3°时对4组压簧按表2选型进行仿真,得到4组导向爪与锥钢套的受力图(见图6),此处的压簧K系数及受力大小由压簧K常数计算方法(见2.3节)得到.

表2 导向爪压簧选型测试参数Table 1 Test parameters of guide claws pressure springs selection
由受力图6可知,导向爪1和3与锥钢套在1.38 s接触,接触后接触力平稳增加;而导向爪2与锥钢套接触后又脱离,与导向爪4在接触后进行衰减振荡后定心.导向爪2在初始状态受力较大,完成最终定心后,4只导向爪受力基本相同.
通过SolidWorks Motion仿真测得在对接座中心线偏角为3°时,于法兰套底300 mm处钢丝绳提升速度定为0.1 m/s,采水器及对接座质量为130 kg.下对接座钢锥套中心点x轴偏移量及y轴偏移量如图7所示.
分析仿真图7可以看到,锥钢套在x轴向中心点偏移量较小(这与设定的仿真偏转方位有关),锥钢套在y轴偏移量较大,最大偏移量为11 mm.另外,图7还显示在对接座中心偏移3°时,对接座都能很好地进行对接.对中效果发生在1.9 s后基本维持中心点不变,验证了压簧选型的正确性.

图6 4种选型下导向爪接触力对比Fig.6 Comparisons of contact force between 4 types of guiding claw

图7 对接座锥钢套在对接过程中的中心点X,Y偏移量Fig.7 X,Y ofset of center point of cone steel sleeve during docking
2.2 对接机构导向爪压簧的受力分析
为了了解在对接过程中导向爪压簧的受力情况,本工作选择选型4中受影响最大的导向爪2进行压簧压缩长度仿真数据测量.图8为对接影响最大的导向爪2的压簧压缩曲线图.

图8 对接过程中的导向爪2压簧压缩长度变化Fig.8 Compression spring length change chart of docking process guide claw 2
从图8中可以看出,压簧初始压缩长度为20 mm,导向爪在1.28 s时开始接触锥钢套后,压簧按非线性压缩,到2.35 s后,导向爪伸展到最大,此时压簧压缩长度为29 mm.
2.3 对接机构弹簧的K常数计算
压簧K系数的受力计算(当弹簧被压缩时,每增加1 mm距离的负荷(N/mm))公式如下,

3 粗精对接机构的强度设计
3.1 对接机构导向爪受力分析
由于采样对接装置导向爪压簧的预紧力为定值,在粗定位过程中导向爪随着下对接座圆锥面直径的增大,其伸展角度将随之变大,因此导向爪与圆锥面接触力也逐渐增大.当二者接触力大到一定程度时,导向爪局部接触点因屈服极限的限制可能会出现塑性变形,最终导致导向爪定位功能失效,为此需对导向爪的强度和安全性进行分析.
下对接座采用钢丝绳提升,故无法完全保证下对接座中心轴线与上定对接头轴线完全重合.在实际工作过程中由于其工作条件和环境的限制,下对接座轴线与上定对接头轴线可能会出现一定角度的偏差.本对接装置因采水器穿过船体开孔,故可以将采水器偏摆角度限制在3°以内.图6记录了导向爪在4种压簧选型下的接触受力情况.
由仿真图6可以看出,在设定3°的对接座不同的方位偏向角时,4个导向爪的接触受力情况不一样,这与仿真输入的初始条件有关.如果设置为45°面及135°面时,对接座在偏摆对接过程中有2只导向爪同时接触下对接座锥钢套,这样分析得到的导向爪力不能达到最大.为此设置偏向在xOz及yOz面,得到的对接过程中的导向爪的最大接触力如表3所示.

表3 不同导向爪压簧选型对应的接触力Table 3 Contact force of diferent guide claw compression springs
由仿真图6还可以看出,对于每一个导向爪压簧选型来说,有两个对称导向爪与对接底座接触,其中一个接触后会迅速脱开,对对接机的中心线起调整作用;而对称的另一个导向爪接触后接触力显著增大.另2个导向爪与底座正常接触,接触力呈线性增加,说明没有起调整作用,符合导向爪随对接座上升导向爪夹角增大弹簧压缩力也增大的要求.
另外,由于导向爪压簧选型不同,故对接装置的效果不一样.导向爪压簧的弹簧力越大,对接效果就越好,但随着导向爪的接触力增大,对导向爪的强度及刚度提出了更高要求,为此推荐选用更粗的弹簧及更大的压缩力,同时增大导向爪尺寸.
3.2 对接机构导向爪有限元分析
为验证本装置的合理性,采用SolidWorks Simulation对影响最大的关键部件导向爪2进行有限元分析.导向爪材质为316L,抗拉强度极限[σb]≥480 MPa.屈服极限为172 MPa,设置边界条件:导向爪与锥钢套接触部分力在选型4中为218 N,导向爪上孔与轴采用绞接,中间圆形部分为弹簧着力点,按接触平面代替.仿真分析结果如图9所示.

图9 仿真分析Fig.9 Simulation analysis
通过如图9(a),(b)仿真计算可知,本装置基本满足设计要求,导向爪2与钢锥套接触部分的接触应力为84.1 MPa,而屈服应力极限为172 MPa,其最小安全系数为2.049,强度最弱点位于中间偏上位置,后期可对此加强处理.
4 结论
(1)设计了一套海水采样对接装置,实现了海水分层采样到分配储存系统的传输,解决了海水从采水器到分配储存系统的对接传输中出现的问题;
(2)使用SolidWorks Motion仿真了采水对接传输装置的运动过程,分析消除了影响对接精度的因素;
(3)使用SolidWorks Simulation解决了最重要关键件导向爪2的强度设计问题;
(4)通过对弹簧力的仿真计算,优选了弹簧在本装置的设计参数.
综上所述,本工作设计了一套海水采样对接装置.通过二次杆锥定心,完成O形密封圈的装配工作.借助弹簧的阻尼减震作用及波纹管的补偿轴向位移及径向偏心的功能,使对接过程中的各种偏差得到消除,并且零部件直接接触部分全部采用316L材质,较好地解决了寿命问题,取得了有同类腐蚀液体传输要求的新突破.
参考文献:
[1]RIJKENBERG M J A,DEBAAR H,BAKKER K,et al.“PRISTINE”,a new high volume sampler for ultraclean sampling of trace metals and isotopes[J].Marine Chemistry,2015,177:501-509.
[2]于文鹏,王巍,宗光华,等.抓持式对接机构的设计及分析[J].机器人,2010,32(2):233-240.
[3]WEI H,HuANG Y Y,CHEN X Q,et al.Flexible cone impact dynamics based on space probe-cone docking mechanism[J].Science China Physics,Mechanics&Astronomy,2014,49(1):1053-1061.
[4]ROMANO M,FRIEDMAN D A,SHAY T J.Laboratory experimentation of autonomous spacecraft approach and docking to a collaborative target[J].Journal of Spacecraft and Rockets,2007, 44(6):164-173.
[5]UI K,MATuNAGA S,SATORI S,et al.Microgravity experiments of nano-satellite docking mechanism for fnal rendezvous approach and docking phase[J].Microgravity Science and Technology, 2005,17(3):56-63.
[6]XIA J,DuRFEE W K.Experimentally validated models of O-ring seals for tiny hydraulic cylinders[C]//Asme/Bath Symposium on Fluid Power and Motion Control.2014,DOI: 10.1115/FPMC2014-7825.
[7]SIEBEN C,REINHART G.Development of a force-path prediction model for the assembly process of O-ring type seals[J].Procedia Cirp,2014,23:223-228.
[8]崔青玲,李建平,张晓明.优化设计前后波纹管位移补偿能力的有限元分析[J].机械设计与制造, 2013(7):197-198.
[9]BAKsYˇs B,BAsKuTIEN˙E J,POVILONIs A B.Experimental investigation of parts vibratory alignment exciting immovably based part[J].Mechanics,2016,59(3):42-48.
[10]DELROBAEI M,MCIsAAC K A.Docking joint for autonomous self-assembly[C]//Conference on Electrical&Computer Engineering.2008:1025-1030.
[11]王立权,王才东,王文明.水下液压油路对接装置的结构及精度研究[J].哈尔滨工程大学学报(英文版),2010,31(9):1253-1258.
[12]ALLEN B,AusTIN T,FORREsTER N,et al.Autonomous docking demonstrations with enhanced REMUS technology[C]//Oceans.2006:1-6.
Design of a seawater sampling and docking transmission device
YANG Chao1,GUO Weiqi2,JIN Zuowen3,YANG Yi4,LI Xiaomao4, LIU Mingque4,PENG Yan4
To solve the docking problem of seawater sampling from lifting multi-bottle sampling arrays to storage and distribution,a set of design schemes for seawater transfer docking device according to seawater sampling requirements is proposed.The docking transmission device is composed of an upper fxed joint and a lower docking seat,where 4 compressed guide claws surrounding the upper joint contact the lower cone,making a rough claws-cone docking mechanism and compensating rod and cone docking of the second fne docking of the positioning error to lessen the positioning accuracy requirements.The mechanical structure ensures to meet the requirements of O-ring assembly in the seawatereccentric fow channel from the samplers to the distribution system.To eliminate the infuence of variations in the docking process,the axial displacement and radial eccentricity are compensated by the fexible connection of the corrugated pipe.The purpose is to prolong the service life of the device.Based on the SolidWorks Motion simulation,the centering process of the whole docking system is simulated to reveal infuence of various kinds of variations on the docking mechanism.The stress state of the guide claw in the docking process is simulated with SolidWorks Simulation,showing rationality of the structure design.
seawater sampling;auto-connect release;O-ring seal;spring damping shock absorption;corrugated pipe compensation
TH 122
A
1007-2861(2017)01-0037-10
10.3969/j.issn.1007-2861.2016.07.008
2016-12-07
国家自然科学基金资助项目(51675318,51305271,61525305);上海市优秀学术带头人计划项目(15XD1501800)
郭伟其(1965—),男,教授,研究方向为海洋工程勘察.E-mail:guo-weiqi@163.com
(1.Systems Engineering Research Institute,China State Shipbuilding Corporation,Beijing 100036,China; 2.State Oceanic Administration,East China Sea Marine Environment Survey and Investigation Center, Shanghai 200137,China; 3.East China Sea Branch,State Oceanic Administration,Shanghai 200137,China; 4.School of Mechatronic Engineering and Automation,Shanghai University,Shanghai 200072,China)
猜你喜欢
福建交通科技(2021年10期)2022-01-25
一重技术(2021年5期)2022-01-18
建材发展导向(2021年15期)2021-11-05
昆钢科技(2020年4期)2020-10-23
网络安全和信息化(2020年3期)2020-04-20
四川水泥(2020年1期)2020-03-09
橡塑技术与装备(2018年14期)2018-07-20
核科学与工程(2017年4期)2017-09-14
中国房地产业(2016年2期)2016-03-01
焊接(2015年3期)2015-07-18
