
车用双发电机并联发电控制研究
2017-04-06 03:48王超陈浩陈曦连小珉
汽车技术 2017年2期
王超 陈浩 陈曦 连小珉
(清华大学,汽车安全与节能国家重点实验室,北京 10084)
车用双发电机并联发电控制研究
王超 陈浩 陈曦 连小珉
(清华大学,汽车安全与节能国家重点实验室,北京 10084)
为实现车用双发电机并联均衡发电,对并联发电系统进行端电压控制和电流分配控制。运用基于输出量反馈的电流解耦方法及PID控制方法,对双发电机并联发电控制系统进行系统建模,针对系统的双目标控制要求,实现了电压精准控制和电流快速均衡并研究了解耦后简化的参数整定方法。simulink仿真和试验验证结果表明解耦控制方法有效。
1 前言
近年来,越来越多的客车厂采用双发电机甚至多发电机并联供电以满足增大的用电功率,但随之带来了双发电机并联发电不均衡的问题。在实际生产制造中,即使同一个型号的发电机仍会存在参数不一致的情况。目前,国内外公开的成果中只有博世(Bosch)公司通过采用带通讯功能的调节器并结合高质量一致性发电机实现并联发电,但其均衡效果有限,而且制造成本较高。因此,有必要对不同型号双发电机并联发电控制进行研究[1]。
发电机并联系统在控制方法上一般采用基于均流法的双闭环PID控制,均流方法包括最大/最小电流均流法和主从均流法等[2~3]。然而,双闭环形式的控制均未实现对两个控制目标的解耦控制,在实际应用中存在参数整定困难、动态特性差等问题。
本文提出了一种基于输出量反馈的车用双发电机并联解耦控制方法,通过对控制目标的分析,设计解耦环节,实现电压和电流比的综合控制,并进行仿真和试验验证。
2 双发电机并联发电控制系统
客车双发电机并联发电控制系统主要由发电机1、发电机2、控制器、电流传感器及蓄电池等组成,其结构如图1所示。

图1 双发电机并联发电控制系统结构示意
控制器从上位控制器得到目标电压值和目标电流比;发电机在发动机的带动下,产生三相交流电整流后并联在一起给整车供电。系统运行时,控制器从电流传感器处接收发电机1、2的输出电流信号,并采集输出电压信号,由具体的控制策略计算出控制量,通过脉宽调制信号(PWM)控制两个发电机的励磁电流,进而控制系统的电压及目标电流比输出。
3 双发电机并联发电控制策略
3.1 解耦控制设计
针对双闭环控制方法实际应用中存在电流环、电压环相互耦合作用导致控制参数整定困难,系统动态性能差的问题,采用基于输出量反馈的解耦控制方法,其控制框图如图2所示。

图2 控制算法框图
由图2可知,控制算法思路为:目标端电压Ur和目标电流比Kr作为控制系统的目标输入到控制器中,结合控制系统输出量端电压U和两个发电机的输出电流I1、I2进行解耦运算,得到解耦后两个发电机输出电流的偏差量ΔI1和ΔI2,分别通过两组PID控制两个发电机的励磁占空比γ1和γ2,进而实现电压控制和电流比控制。
通过输出量之间的目标约束,可以对控制目标进行解耦,从而能够清晰分析各控制参数的影响并确定控制参数,使系统获得良好的动态效果。
3.2 基于输出量反馈的电流解耦方法
双发电机并联发电控制系统输出量为端电压及两个发电机的输出电流,其控制目标为端电压Ur和电流比Kr。若定义偏差量ΔU=Ur-U,ΔI=KrI2-I1,则控制目标为:

从实际模型可知,由于两个发电机同时承担负载电流,两个发电机之间存在电流耦合。定义偏差量ΔI1=I1d-I1、ΔI2=I2d-I2,其中I1d、I2d为端电压和电流比等于目标值时两个发电机的输出电流值,I1、I2为两个发电机当前电流值。则耦合关系为:
式中,f1、f2为耦合函数。
公式(2)的意义为达到任一控制目标均需同时对两个发电机的输出电流做出调节。对式(2)进行解耦,即存在解耦矩阵P,满足:

进而得到两个发电机各自独立的电流偏差值,分别对两个发电机进行调节。而解耦矩阵P可由电路约束求得。电路原理如图3所示,其中RL为负载电阻,rB为电池等效内阻,EB为电池自身电动势,IB为蓄电池电流,IL为负载电流。

图3 并联供电回路模型
对应并联供电回路,根据基尔霍夫电流定理、欧姆定理及各量定义,当端电压为U时,有:

而当端电压为Ur时,有:

由式(4)和式(5)可以得到:

对比式(6)与式(3),获得解耦矩阵P:

因此,只要知道当前系统的输出量及控制目标偏差值,即可通过解耦方程式(6)求得各发电机独立的电流偏差值,进而对两个发电机进行解耦控制。但式(4)、式(5)成立的前提是两个发电机至少有一个在输出电流,即只在自励阶段成立。当系统每次建立电压时,存在由他励(蓄电池励磁)到自励的转变过程。他励过程中两个发电机均未输出电流,不存在耦合问题,他励阶段励磁控制在后文做出讨论。
4 控制方法与参数的仿真获取
4.1 PID方法实现
对于两个24 V发电机,通过上述解耦方法可求得两个发电机输出电流的偏差量,则可通过两组独立的PID参数来控制两个发电机的励磁,进而实现电压和电流比的控制。考虑到实际应用中,单片机存在存储容量和计算能力有限的制约,故选择采用增量式PID方法。而增量式PID中的I环节类似于绝对值PID的P环节,其决定系统的稳态性能;P环节类似于绝对值PID的D环节,能改善其动态性能。结合实际系统特性,增量式PI调节能获取较好的稳态和动态特性,且参数获取较为简便,故采用增量式PI算法,即控制律为:

其中KP1、KI1、KP2、KI2分别为两组PID的比例调节系数和积分调节系数。两组PID控制参数可通过单电机发电模型的仿真试验和试验台试验进行整定。控制方法的Simulink模型如图4所示,其中模块A为解耦模块,其表达式如式(6),模块B1、B2为PID控制模块,其表达式如式(8)。
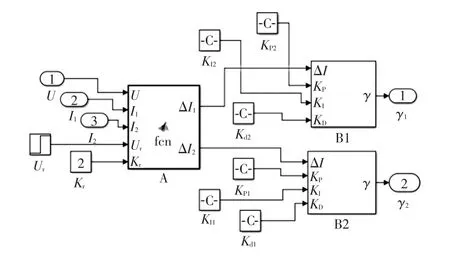
图4 控制方法的Simulink模型示意
4.2 双发电机并联发电控制系统建模
双发电机并联发电控制系统的仿真模型主要由4部分组成,其结构如图5所示,其中F1(F2)为励磁模型,G1(G2)为电磁感应模型,R1(R2)为整流桥模型,D为并联供电回路模型。分别对这4个子模型进行分析和建模,可以得到实际系统的Simulink模型。
4.2.1 励磁模型F1、F2
励磁模型输入为脉宽波占空比,输出为励磁电流。其为一个RL回路,为典型一阶惯性环节[4],其物理模型如图6所示,其中rf、Lf为励磁绕组的电阻和电感,If为励磁绕组的电流。
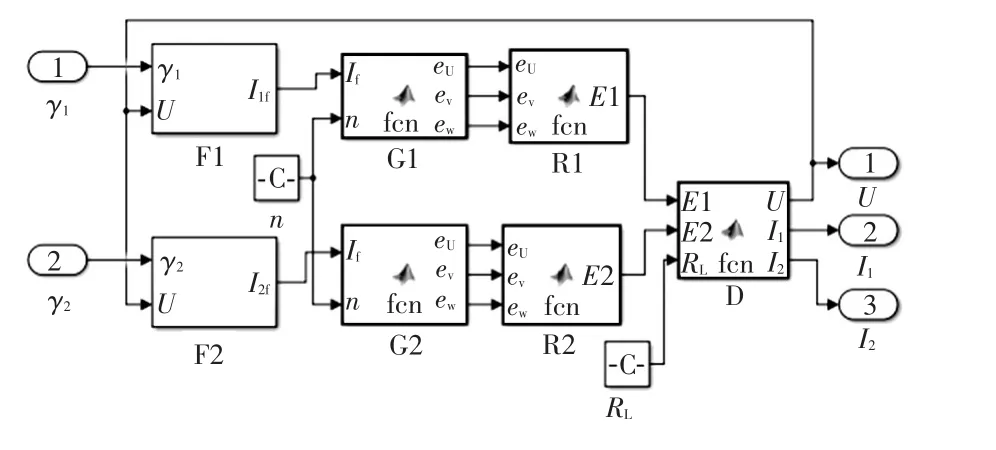
图5 实际系统Simulink模型结构示意

图6 励磁环节物理模型
对于高频开关形成的励磁有效电压可近似为γ1U,则由电路方程可知:

可得励磁模型F1和F2的数学表达式为:

4.2.2 电磁感应模型G1、G2
定子线圈在转子转动磁场的作用下产生三相感应电动势,其交流有效值取决于发电机的转速和励磁电流[5],其物理模型如图7所示,其中eU,eV,eW为发电机定子三相线圈产生的感应电动势。
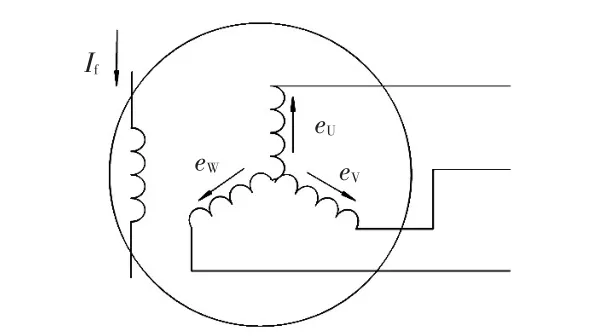
图7 电磁感应环节物理模型
则电磁感应模型G1(G2)的数学表达为:

式中,Em,i和Eφ,i分别为发电机i三相电动势的幅值和有效值;w为角速度;Ki为发电机i的电机常数,跟电机结构有关;n为发电机转速。
4.2.3 整流桥模型R1、R2
三相全桥整流由两组6个整流二极管组成,每次某个正向二极管输出当前最高电势并钳制住其余两相正向二极管,负向二极管同理,其物理模型如图8所示,其中u+、u-为整流桥正、负端电势,E为整流后电动势。

图8 整流环节物理模型
根据整流原理,有:

最终输出电动势为:

式中,Ud为整流桥压降。
结合式(12)与式(13)可得整流模型R1和R2为:

4.2.4 并联供电回路模型D
两个发电机同时给蓄电池及负载供电,因此需要对蓄电池建模,结合实际情况选取蓄电池一阶等效模型[6],其供电回路模型如图3所示。根据基尔霍夫电路定理及欧姆定理有:

化简后得到并联供电回路模型D为:
式中,r1、r2分别为发电机1、2的等效内阻。
综合式(10)~式(16),得到实际系统各个环节的数学关系,即可搭建对应的Simulink模块。
4.3 仿真和分析
根据控制律模型及实际受控系统的模型可得到控制系统总的Simulink模型,各参数取值如表1所列。

表1 仿真相关参数
4.3.1 单发电机发电控制系统仿真
a.他励阶段参数整定
他励阶段由于发电机电压未建立而电池本身存在一定的电动势,故存在“钳制”作用,使得此阶段只有增量式PID中的I环节在起作用,可认为采用定增量去控制,即:

两个阶段的控制参数共同决定了系统的响应。控制参数作用如图9所示。

图9 控制参数作用示意
他励阶段的增量C1决定了发电机从起动到输出电流的时间t1,进而决定了稳态响应时间tS。对于双发电机并联发电控制系统,要求两个发电机同时输出,即要求相同的t1,故可先确定他励阶段的控制参数,再根据各自的动态响应获取自励阶段的控制参数。
设定t=0时刻的参考电压值Ur2=27.5 V,根据实际系统的工程要求,取t1=2 s。对发电机1进行控制仿真,可确定C1=1.0,同理可得C2=1.2。
b.自励阶段参数整定
自励阶段的控制方程如式(8)所示,PI参数同时起作用。整定过程可参考Z-N法则。以发电机1为例,先采用纯I控制,使其产生临界震荡,可得KI1max=1.8,故可按经验选取KI1=0.8,再加入KP1,改善其动态性能,使其建压过程无超调,可得KI1=0.8、KP1=3.2。其响应如图10所示。
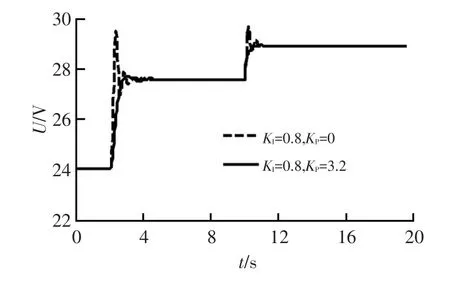
图10 不同控制参数下的电压响应
考虑到实际应用中控制系统的建压过程存在启动过程和参考电压转变过程,故试验中在t=10 s时将参考电压值改为29 V。由图10可知,同一组参数下,两个过程的动态响应均良好。同理可得KI2=0.9、KP2=3.8。
4.3.2 双发电机并联发电控制系统仿真
采用对应的模型进行仿真,控制参数采用试验结果,设定t=0时刻的参考电压值Ur=27.5 V,t=10 s时刻的参考电压值Ur=29 V,此时系统的输出如图11所示。可以看出,2个发电机同时输出电流,说明解耦方法和控制参数整定方法合理;两个发电机刚输出电流时,其输出端电压和电流比均未达到期望值,但在控制方法调解下,端电压和电流比同时收敛达到稳态。与采取相同参数的相比,此次输出端电压存在很小的超调;发电机启动时,由于追求较高的响应速度,供电系统的端电压变化很快,而由于蓄电池存在电容效应,发电机的电流会存在超调现象,当端电压达到稳态值后,其会很快趋于平稳;作为对比,当参考电压值由27V变为29 V时,其端电压变化速度较小,其电流未出现超调。

图11 双发电机并联发电控制仿真验证
以上仿真试验是在n=2 000 r/min,RL=1 Ω条件下进行的,考虑到发电机的稳态工作点随着转速和负载改变而改变,为了验证参数的合理性,需考量参考电压变化时在各转速和负载下端电压的超调量和稳态时间。从系统模型和控制策略可知,低转速低负载工况下系统的响应最慢,高转速高负载下系统响应最快,结果如图12所示。

图12 不同工况下系统响应曲线
由图12可知,低转速低负载时参考电压由27.5 V变为29 V的系统稳态时间为2 s,高转速高负载下无超调,响应良好。
5 试验验证
5.1 试验
由于发电机的电参数难以测量,且实际系统中发电机和蓄电池存在非线性环节,故仿真结果仅能证明该控制策略的有效性,其具体实际效果应在试验台上进一步验证。试验台结构如图13所示。

图13 试验台结构示意
计算机通过变频器控制驱动电机,经传动机构给发电机提供动力,双发电机并联发电系统在控制器的控制下给蓄电池及负载(充放电仪)供电。试验条件设为转速2 000 r/min,负载电流10 A,参考电压为27.5 V和29 V,电流比设为2。按照上述参数整定过程,确定他励阶段控制参数C1=0.8、C2=0.5,进而确定两个发电机自励阶段控制参数KI1=0.2、KP1=1.2、KI2=0.15、KP2=1。
5.2 试验结果分析
试验结果如图14所示。可以看出,该方法能很好地实现电压和电流比控制,说明解耦方法和控制参数整定方法合理、有效。而由于发电机的电参数难以测量,电池模型作了低阶次简化及因实验设备限制导致系统工作条件略有不同等原因,试验结果与图11的仿真计算结果在稳态数值上有一定差别,但基本与仿真结果一致,证明了该方法的实用性。

图14 试验结果曲线
6 结束语
a.基于输出量反馈的电流解耦方法可以有效实现双发电机并联发电的解耦,方便通过单发电机控制试验来整定控制参数;
b.汽车双发电机并联发电控制系统模型能较好地反映实际系统的特性,有助于参数的整定和仿真试验;
c.电流解耦PID控制方法能实现车用不同型号双发电机并联发电系统的电压和电流比同步控制。
1 孔伟伟,杨殿阁,李兵,等.传统汽车发电机的智能化控制及改造.清华大学学报,2014,54(6):738~743.
2 周瑶.基于CAN总线的并联直流发电机数字控制技术研究:[学位论文].南京:南京航空航天大学,2011.
3 戴卫力.飞机无刷直流起动/发电系统的研究:[学位论文].南京:南京航空航天大学,2008.
4 赵莉华,曾成碧,苗虹.电机学(第二版).北京:机械工业出版社,2014.
5 戈里.汽车交流发电机.北京:人民交通出版社.1987
6 张亮.铅酸蓄电池动态等效电路的模型仿真.上海电力学院学报,2015,31(4):342~346.
(责任编辑 晨 曦)
修改稿收到日期为2016年9月1日。
Research on Parallel Power Generation Control of Double Vehicle-used Generator
Wang Chao,Chen Hao,Chen Xi,Lian Xiaomin
(State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084)
In order to realize the balanced power supply of double generator parallel generation,terminal voltage and current distribution between two generators were controlled.We used current decoupling control method based on output feedback and PID control,then built a model for the parallel power generation control system of the double-generator,and voltage precise control and current fast rebalance were achieved to meet the double-target control requirement.The simulink simulation and real system test verify the validity of the decoupling control method.
Double generator,Parallel power generation,Double target control
双发电机 并联发电 双目标控制
U463.63+1
A
1000-3703(2017)02-0057-06
猜你喜欢
大电机技术(2022年3期)2022-08-06
电气传动自动化(2022年4期)2022-08-04
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
电加工与模具(2021年1期)2021-02-25
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
上海海事大学学报(2016年4期)2017-01-19
