
基于工况及驾驶意图识别的SOC动态控制研究
2017-04-06 03:48孙瀚文王鹏欧阳
汽车技术 2017年2期
孙瀚文 王鹏 欧阳
(中国汽车工程研究院股份有限公司,重庆 400061)
基于工况及驾驶意图识别的SOC动态控制研究
孙瀚文 王鹏 欧阳
(中国汽车工程研究院股份有限公司,重庆 400061)
为了解决混合动力汽车在不同驾驶工况及驾驶意图条件下油耗存在较大区别的问题,通过研究混合动力汽车的EV/HEV模式切换策略,分析SOC单阈值控制的不足,提出了一种能够根据驾驶工况、驾驶意图对SOC进行动态控制,合理选择EV/HEV模式切换点的方法。运用该方法,在分段层面通过驾驶工况识别,在实时层面通过驾驶意图识别,实现了发动机起停及工作点的优化,提高了电能利用效率,试验结果表明,实现了11.14%的节油效果。
1 概述
电池系统的优化控制是影响混合动力系统燃油经济性的重要因素,其中,最为关键的荷电状态(State of Charge,SOC)控制不仅影响功率分配(可充/放电功率)、燃油效率,也影响电池的性能和寿命等。所以,燃油经济性等重要性能在一定程度上取决于行驶过程中的SOC管理,在整车层面则表现为EV/HEV模式切换点控制。
针对混合动力汽车的SOC优化控制,研究人员开展了多项研究工作。高建平[1]研究了基于工况识别的SOC优化策略,选取了10个特征参数描述工况信息,在实际驾驶中进行工况信息识别,实现了能量的优化利用;张亚明[2]选取了影响相对较大的9个特征参数描述工况信息,简化了工况识别,提高了实时性;秦大同[3]、王庆年[4]等人考虑到驾驶意图对整车能量分配的影响作用,提出了基于驾驶意图识别的SOC优化策略。
以上研究在基于工况识别、驾驶意图识别的SOC优化控制方面提出了很好的解决方案,但工况识别是针对某一段路况的识别策略,面对多变的实际道路工况,在策略的瞬时调整上略显不足,而驾驶意图识别在实时性上具有较大的优势。因此,本文结合驾驶工况识别与驾驶意图识别提出了SOC优化控制方法,并进行了相关试验验证。
2 EV/HEV模式控制策略
混合动力汽车的EV/HEV模式切换时机是根据SOC与车速确定的[5]。当驾驶员输入的需求功率高于根据SOC和车速计算得到的发动机起动功率阈值时,发动机起动,否则不起动。
因此,EV/HEV模式切换控制策略的关键是SOC控制策略。通过合理的SOC阈值控制,减少发动机起停次数,使发动机更多地运行在高效区间,提高燃油经济性。
3 SOC单阈值控制策略
对于插电式混合动力车型,其电池组工作模式包括电量消耗(Charge Depleting,CD)模式和电量保持(Charge Sustaining,CS)模式,不同模式的SOC控制策略不同[6]。CD模式充分利用电能输出,SOC逐渐降低,直至到达SOC控制阈值(SOCobj),进入CS模式;CS模式以SOCobj为控制目标,电池仍可放电直至到达CS模式SOC下限(SOClow),起动发动机或提高发动机起动功率阈值,在满足功率需求的同时,为电池充电,至CS模式SOC上限(SOChigh)后不再充电,发动机停机或降低发动机起动功率阈值,利用电池纯电驱动或助力。
当电池组处于CD模式时,整车在一定车速范围内尽可能保持在EV模式,同时扩大电池助力的范围,发动机容易工作在经济点,因此CD模式的SOC控制相对简单。而CS模式由于存在较多的EV/HEV模式切换,发动机运行工况明显增多,SOC控制与整车性能的关系更为紧密,若仅靠某个固定阈值控制,遇到较为激进的工况,荷电状态可能长时间处于SOClow,电池助力消失,发动机在全工况运行。
4 工况识别
根据不同的工况特点,建立工况特征参数库,反映工况的特征参数包括平均车速、平均加速度、平均减速度、最大减速度等,平均车速、平均加速度、平均减速度的计算方法为:

国际上对工况特征参数并没有统一的标准,参数选择过多会影响工况识别的实时性,过少会影响工况识别的准确性,因此,研究过程中可根据需要选择适当数量的工况特征参数。
在车辆行驶过程中,采集工况参数信息,与工况特征参数库进行对比,识别此时的工况。若处于城市工况,通过降低SOCobj、提高发动机起动功率阈值,使整车继续处于EV模式下,增加纯电行驶里程,减少由于发动机起停产生的非必要燃油消耗;若处于高速工况,则通过提高SOCobj、降低发动机起动功率阈值,使整车保持HEV模式,发动机处于高效工作区间。
工况识别可采用基于单隐含层前馈神经网络的学习算法[7],训练集包含4个标准循环工况(NEDC、UDDS、HWY、US06),构建随机工况作为测试集,经过训练后的识别结果如图1所示。工况识别结果中,“1”表示城市城郊工况,“2”表示高速公路工况。

图1 随机工况的识别结果
5 驾驶意图识别
考虑到工况识别较难应对整车瞬时状态变化,在此基础上,引入驾驶意图识别。对驾驶意图进行分类,确定驾驶意图识别参数,在车辆行驶过程中,采集驾驶员操纵信息,通过参数对比,识别驾驶员操纵意图。
若工况较为激进,通过降低SOClow,扩大电池助力窗口,增加辅助驱动能力,提高发动机工作在经济区间的机会;若工况较为缓和,通过提高SOChigh,扩大电池充电窗口,增加纯电行驶能力,减少发动机起停次数。
驾驶意图随车辆运行状态和工况环境实时变化,是经典的经验模型,而模糊理论在处理经验模型上具有明显的优势[8~9],因此,采用模糊控制器识别驾驶员操作意图,根据模糊控制器理论,建立驾驶员意图的模糊推理控制器,输出变量为驾驶员意图(包括起步、平稳加速、一般加速、急加速、低速巡航、中速巡航、高速巡航),输入变量为车速、加速度、踏板开度、踏板开度变化率等,并将各输入变量模糊化。
车速的模糊子集为{VS,S,M,L},其中VS表示极小,S表示小,M表示中,L表示大;加速度的模糊子集为{Z,PS,PM,PL},其中Z表示零,PS表示正小,PM表示正中,PL表示正大;油门踏板开度的模糊子集为{S,M,L},其中S表示小,M表示中,L表示大;油门踏板变化率的模糊子集为{NS,Z,PS,PM,PL},其中NS表示负小,Z表示零,PS表示正小,PM表示正中,PL表示正大。
输入变量隶属度函数均采用高斯函数,如图2所示。模糊规则的形式为“if…and…then…”,最终确定的模糊规则库如表1所示。某段工况的驾驶意图识别结果如图3所示。驾驶意图识别结果中,“1~7”分别表示起步、平缓加速、一般加速、急加速、低速巡航、中速巡航、高速巡航。
模糊推理采用Mamdani推理原则:

式中,R为模糊规则集合;A、B为模糊输入集合;x、y为模糊输入量;μ(x)为隶属度函数。
清晰化计算采用重心法,取μc(z)的加权平均值为z的清晰值,即:

式中,z0为清晰值;μc为模糊输出集合的隶属度函数;zi为模糊输出量。
6 基于工况和驾驶意图识别的SOC动态控制
基于固定阈值的SOC控制策略不够灵活,无法应对多变的道路工况和驾驶员操作输入。为了改善这种状况,提出了结合工况和驾驶意图识别的SOC动态控制方法,如图4所示。
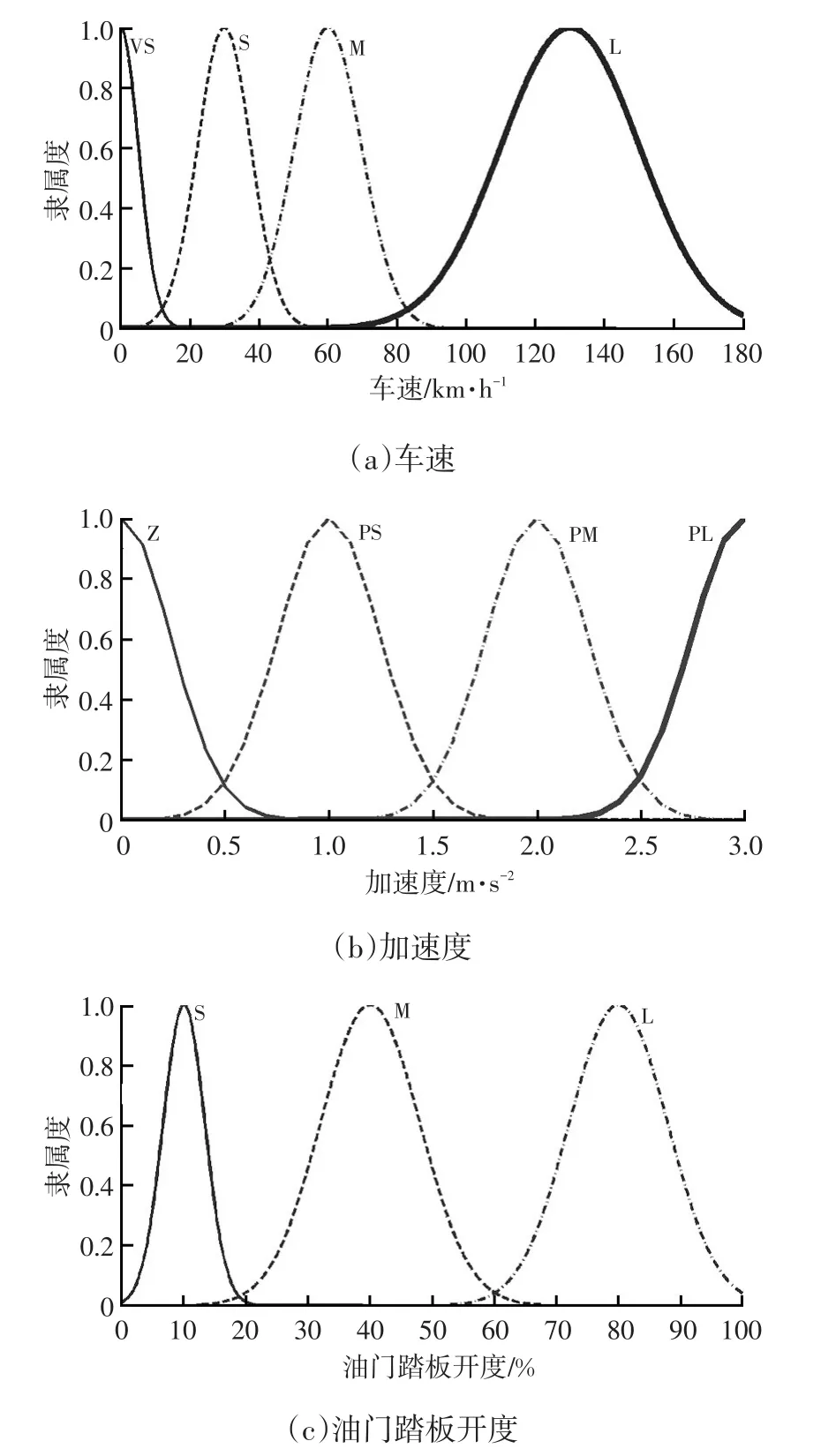

图2 各输入变量的隶属度函数

表1 驾驶员意图模糊规则库
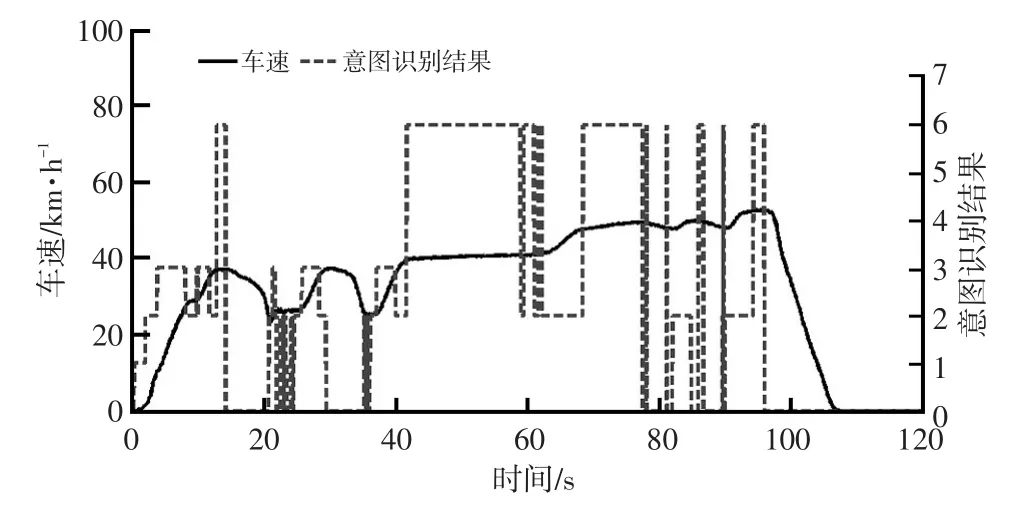
图3 某段工况的驾驶意图识别结果

图4 基于工况和驾驶意图识别的SOC动态控制
假设2种工况Q、S分别对应城市工况与高速工况,3种驾驶意图q、s、t分别对应平稳加速、中速巡航、急加速,则共有6种识别结果,分别对应不同的SOC阈值控制,对发动机及电池控制策略进行动态调整,如表2所示。
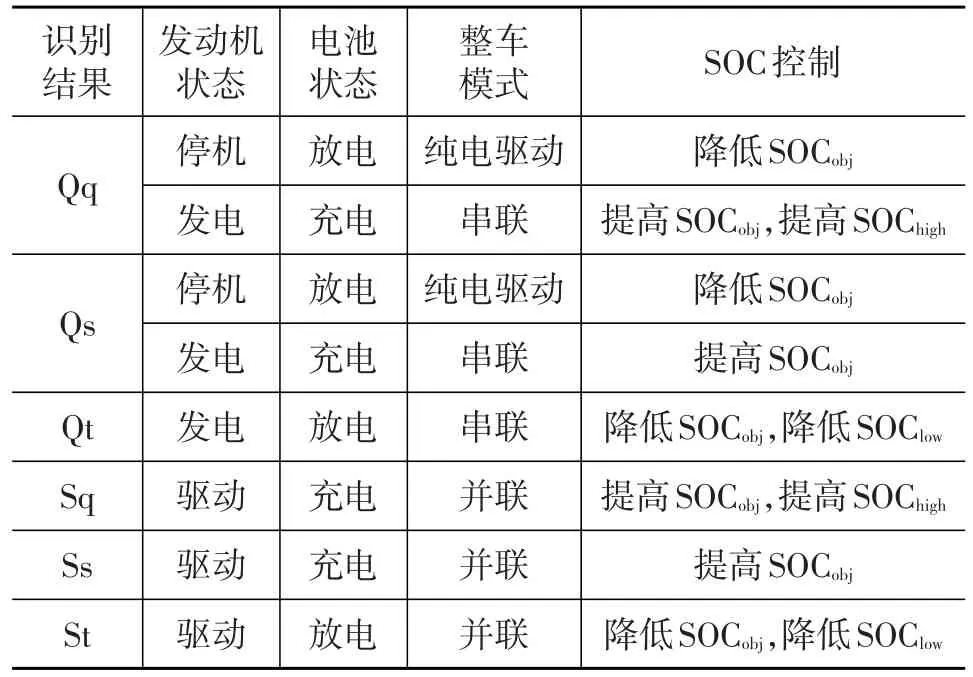
表2 控制案例
该方法通过工况识别在分段层面上控制动力源的功率分配,辅以驾驶意图识别,在实时层面上覆盖工况的复杂多变,实现SOC的动态控制,优化电能使用以降低油耗。
7 试验验证
试验车的构型及参数如图5和表3所示。该试验车为串并联构型,具有EV和HEV 2种工作模式,HEV模式下具有串联和并联2种驱动形式。

图5 试验车动力总成构型
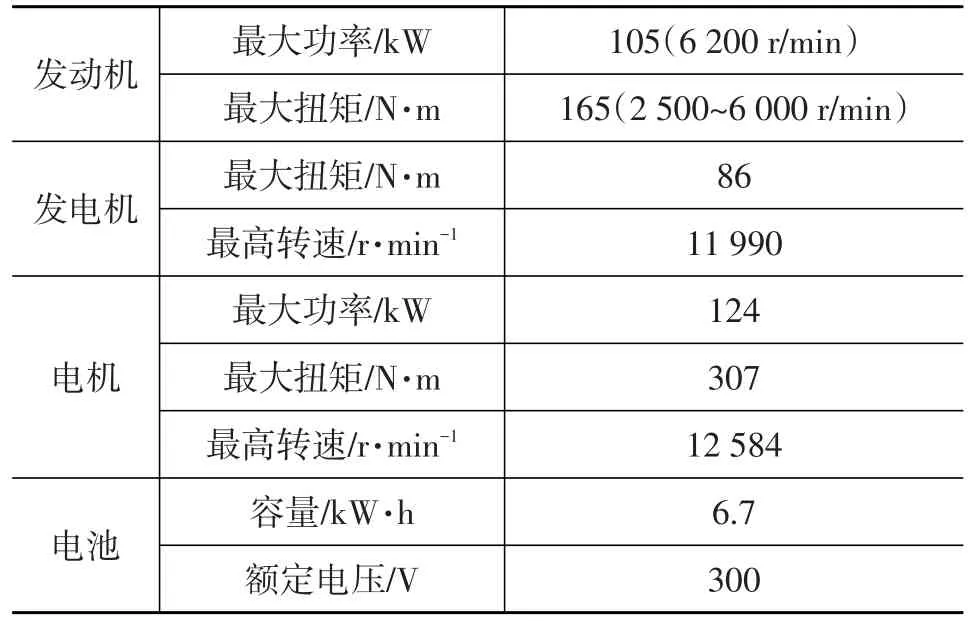
表3 动力总成参数
该试验车搭载的高转速驱动电机可保证纯电及串联模式下整车的驱动性能,搭载的阿特金森循环自然吸气发动机在电池功率不足的情况下也能够通过串联或并联方式成为整车动力源。
在试验车上安装多个传感器,包括半轴扭矩传感器、电流传感器、电压传感器、温度传感器、踏板位移传感器等,同时结合CAN解析,采集各关键信号的试验数据。
通过在台架上进行工况测试,并对结果进行分析,观察本文提出的SOC动态控制方法的实际效果,分析该方法对EV/HEV切换控制、发动机起动功率阈值控制的影响,最后对比不同SOC控制方法的节油效果。
采用市区UDDS工况和高速US06工况进行试验,图6为UDDS工况的测试结果。该工况平均功率约20 kW,属于低速低功率需求工况。经过工况识别,SOC控制区间为26%~28%;在约第200 s处功率需求突增,经过驾驶意图识别,SOC控制区间上调,提供更高的助力能力,减少工况需求的频繁变化给发动机带来的影响;第400 s后,由于SOC较高,功率需求降低,经过识别后,提高发动机起动功率阈值,更多地利用电能进行纯电驱动/助力,回到SOC控制区间。
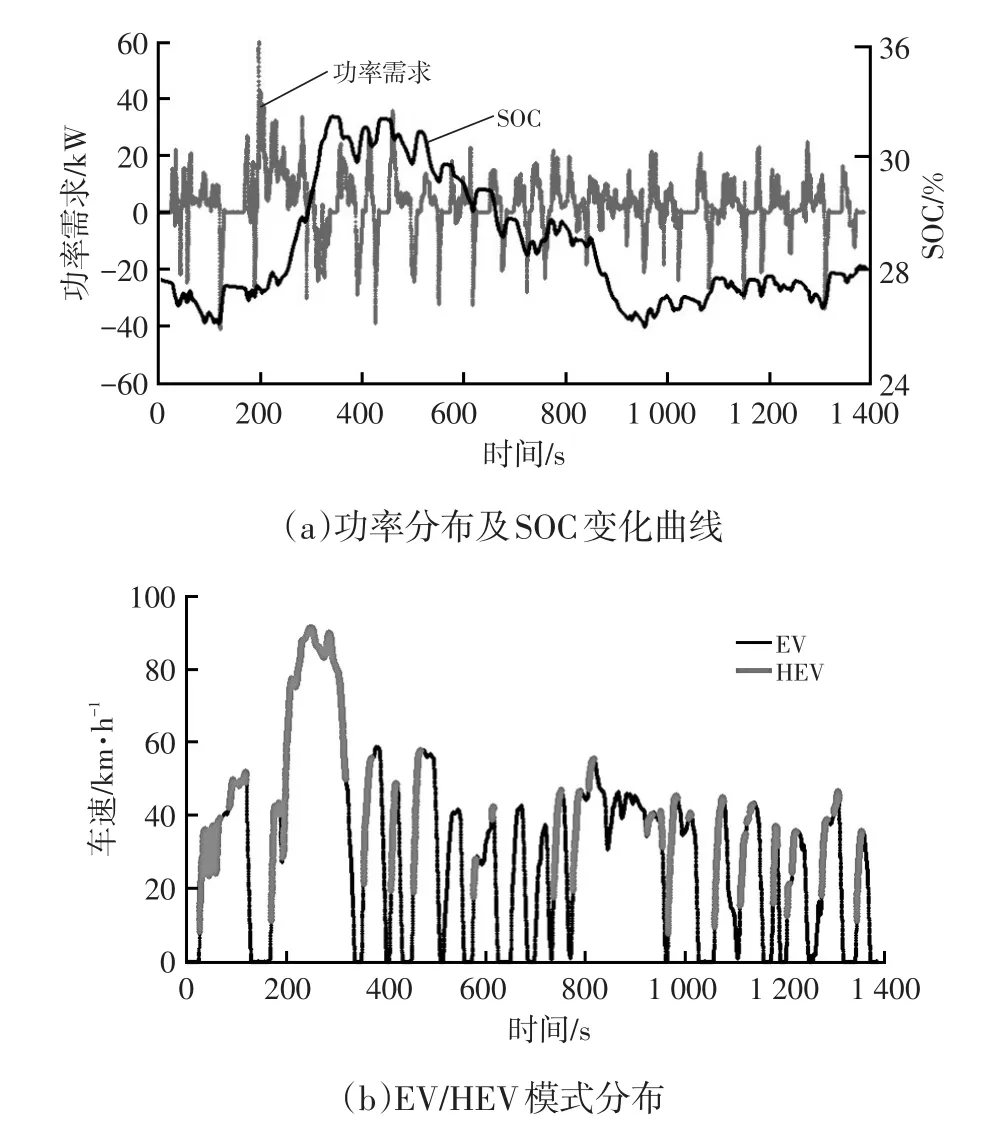
图6 UDDS工况测试结果
图7为US06工况的测试结果。该工况平均功率约40 kW,属于高速高功率需求工况。经过工况识别,SOC控制区间为32%~34%;在约第200 s处功率需求降低,经过驾驶意图识别的结果,SOC控制区间下调,充分利用电能助力,使发动机工作在高速经济区间;第400 s后,由于SOC较低,经过识别后,提高发动机起动功率阈值,为电池充电,回到SOC控制区间。
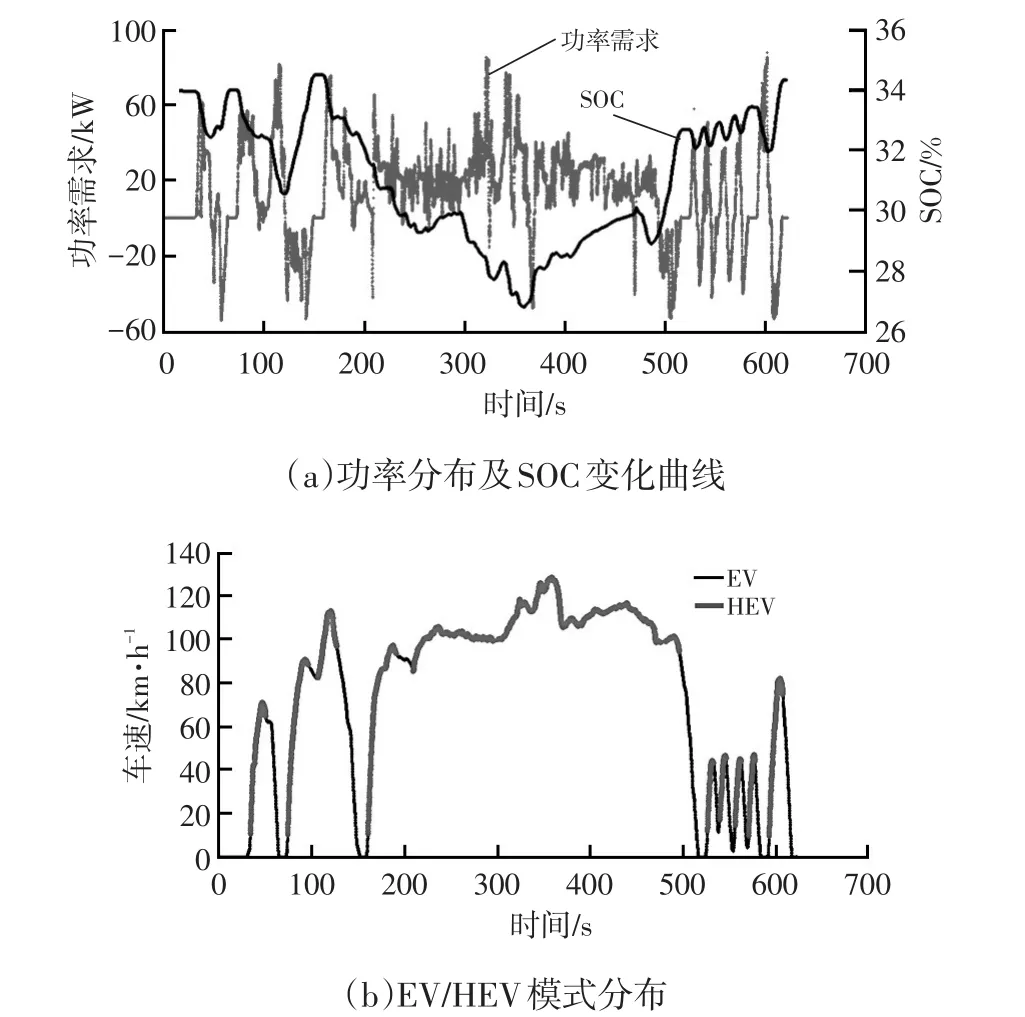
图7 US06工况测试结果
图8为两种工况测试中的发动机起动功率阈值分布结果,可以看到,SOC动态控制方法能使发动机起动功率阈值呈稳定线性趋势且较为集中,更有利于发动机高效控制。
图9为采用两种SOC控制方法的发动机工作点分布,可以看到,SOC动态控制方法使发动机起动功率阈值的分布更加集中在经济区间,且扩大了经济区间的利用范围。

图8 发动机起动功率阈值分布
图10为采用两种SOC控制方法的发动机能量输出积分,在相同工况下,SOC动态控制方法使发动机的能量输出降低了0.144 kW·h,油耗降低了0.067 L,降幅达11.14%。


图9 发动机工作点分布

图10 发动机能量积分
8 结论
本文提出的结合工况识别和驾驶意图识别的SOC动态控制方法,解决了单固定阈值SOC控制的局限性,通过转鼓台架试验验证,达到了节油11.14%的效果。该方法的优势主要有:
a.通过对EV/HEV模式切换时机的控制,实现了发动机起停及起动功率阈值的优化。
b.通过对SOC的动态平衡阈值控制,提高了电能利用效率。
c.普遍适用于多动力源的能量输出匹配,特别是混合动力系统能量管理策略的开发。
1 高建平.基于工况识别的混合动力汽车优化控制策略研究.北京:北京理工大学,2010.
2 张亚明.基于DIRECT算法和工况识别的混合动力汽车优化研究.北京:北京理工大学,2010.
3 秦大同,杨官龙,胡明辉,等.基于驾驶意图的插电式混合动力汽车能量管理策略.吉林大学学报:工学版,2015,45(6):1743~1750.
4 王庆年,唐先智,王鹏宇,等.基于驾驶意图识别的混合动力汽车控制策略.吉林大学学报:工学版,2012,42(4):789~795.
5 Kim J,Sim H,Oh J.The Flexible EV/HEV and SOC Band Control Corresponding to Driving Mode,Driver's Driving Style and Environmental Circumstances.Oxford University Press,2012,4(2):151~152.
6 张博,李君,高莹,等.Plug-in混合动力汽车能量管理策略优化设计.农业机械学报,2009,40(9):20~25.
7 朱凯,王正林.精通Matlab神经网络.北京:北京电子工业出版社,2009.
8 王玉海,宋健,李兴坤.基于模糊推理的驾驶员意图识别研究.公路交通科技,2005,22(12):113~118.
9 Wu L,Su X,Shi P,et al.Model approximation for discretetime state-delay systems in the T-S fuzzy framework.IEEE Transactions on Fuzzy System,2011,19(2):366~378.
(责任编辑 斛 畔)
修改稿收到日期为2016年10月21日。
Research of SOC Dynamic Control Based on Recognition of Driving Condition and Intention
Sun Hanwen,Wang Peng,Ou Yang
(China Automotive Engineering Research Institute Co.,Ltd.,Chongqing 400061)
Fuel consumption of HEV differed greatly under different driving conditions and intentions,to solve this problem,we proposed a method which could make dynamic control according to driving conditions and driving intentions, appropriately selecting EV/HEV mode switching point,through research of EV/HEV mode switching strategy of HEV, analysis of deficiency of SOC threshold value control.With this method,through driving condition recognition by time slot, and real-time driving intention recognition,engine start-stop and operating points were optimized and electric power utilization efficiency was improved.Test results showed that a fuel saving rate of 11.14%was achieved.
Recognition of driving condition,Recognition of driving intention,SOC balancing
驾驶工况识别 驾驶意图识别 SOC平衡
U469.72
A
1000-3703(2017)02-0010-06
猜你喜欢
法律方法(2022年2期)2022-10-20
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
防爆电机(2022年3期)2022-06-17
房地产导刊(2022年5期)2022-06-01
能源工程(2022年2期)2022-05-23
福建基础教育研究(2022年4期)2022-05-16
建材发展导向(2022年6期)2022-04-18
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年7期)2021-07-16
