闽江口水域船舶定线制
2017-04-02 03:22徐才云郑元洲甘浪雄周春辉程慧中
中国航海 2017年4期
徐才云, 郑元洲,3, 甘浪雄, 周春辉, 张 磊, 程慧中
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063;3. 伊利诺伊理工大学, 芝加哥 60616)
福州港(闽江口)是我国沿海主要港口之一,近些年船舶通航密度逐渐增大,出现船舶航路纵横交错和航行无序等现象。由于现有的管理手段滞后,通航环境逐渐恶化,致使该水域船舶碰撞事故时有发生,有必要对该水域内的航路进行规范和优化。
船舶定线制[1]是国际海事组织(International Maritime Organization, IMO)推荐的一种船舶航路优化措施,在规范船舶交通流、保障船舶航行安全和提高交通效率方面起着重要作用。[2]定线制的种类和形式较多,其中分道通航制是目前最常见、最主要的形式。[3]虽然IMO已对其设计原则作出相应规定,但在具体设计时仍涉及到一些关键的技术问题。在有关通航分道宽度的研究中:藤井弥平等[4]对在大洋、沿海及拥挤等3种交通类型的通航水域设置分道通航制的宽度取值给出建议;ABDEL[5]以藤井弥平提出的船舶领域模型为理论基础,通过反复试验提出一种船舶间的标准分割概念,作为确定通航分道宽度的依据之一。在通航分道分隔带的设计上,LEWISON[6]建议:在水域条件允许的情况下,使分隔带宽度≥1 n mile;而在水域条件有限的情况下,采用带宽较窄的分隔带或在边界线上设置浮标以提醒过往船舶。
与国外相比,我国船舶定线制实施较晚,但发展较快。2011年,为加大力度改善我国的水上交通形势,我国制订出《全国沿海船舶定线制总体规划》,期望3~5 a内在全国沿海的交通密集区域、船舶交通流的汇聚区域及事故多发水域实施船舶定线制,10 a内全面落实。闽江口水域属于该规划中的15个支线航路重要水域之一。
闽江口水域的雷达定位条件、灯塔、虚拟航标等导助航设施及设备建设较为齐全,可为该水域船舶定位提供一定的保障。福州船舶交通管理系统(Vessel Traffic Services, VTS)覆盖辖区内重点水域,可实现对闽江口水域近岸侧的有效监控,为定线制的实施提供有利的监管支撑。
在对闽江口水域船舶交通形势进行较全面调查的基础上,结合已有的定线制理论成果,应用海上交通工程的理论和方法,提出闽江口水域船舶定线制推荐方案,实现对水域内航路的规范和优化,使有限的海域资源发挥更大的作用,提高通航效率、保障船舶航行安全和防止海域污染。
1 闽江口水域船舶交通流分布特征
船舶航迹是船舶交通流的基本要素之一,航迹分布表示水域内所有航行路线的空间分布,可在一定程度上呈现水域内船舶交通流的密度和危险度。[7]研究航迹分布图主要是对大范围的水域交通流进行分解,找出主要交通流的空间分布特征,是研究和建立船舶定线制的基础。综合考虑气象、潮流和浪况等因素,随机选取多个月份连续数天的船舶自动识别系统(Automatic Identification System, AIS)数据,应用ArcGIS平台分析解析后的交通数据,绘出船舶历史轨迹(见图1),获取船舶交通特征信息。
1.1 船舶AIS航迹分布特点
1) 众多岛屿的存在导致该水域内的船舶航迹集中在宽度约1 n mile的航迹带上,北上、南下的船舶在主航迹带范围内存在明显的对遇冲突问题。
2) 七星礁(见图2)灯桩及洋屿(见图3)灯塔附近的船舶交通流呈现出北上、南下和横穿等错综复杂的交汇,形成船舶交通流大角度交叉或对遇的冲突局面,会对船舶的航行安全产生较大的威胁。
3) 进出闽江口内港区的船舶交通流交汇点集中在七星礁灯桩正西1 n mile的“D1号浮”附近,进出闽江口内港区的船舶主要在此处转向。
4) 通过闽江口水域南上、北下的船舶交通流主流位于七星礁灯桩东侧。
5) 马祖澳水域现有一处长为3.7 n mile的分道通航制,横穿主航迹带,由台湾地区管辖,目前交通流量较少,几乎没有船舶使用。
1.2 船舶AIS交通量分布特征
根据水域内船舶AIS航迹分布特点,闽江口水域交通密集区域主要集中在洋屿水域与海坛海峡水域之间。因此,在对交通流进行分析时,重点对洋屿水域与海坛海峡之间的船舶交通流进行观测。采用门线反映交通量及其空间分布,主要选取洋屿门线、四母屿门线、马祖门线和白犬门线等4条门线;各门线的长度分别为5 n mile,9 n mile,10 n mile和11 n mile,区间长度为1 n mile。白犬门线交通量及其分布见图4,各门线船舶AIS日均交通量统计见表1。
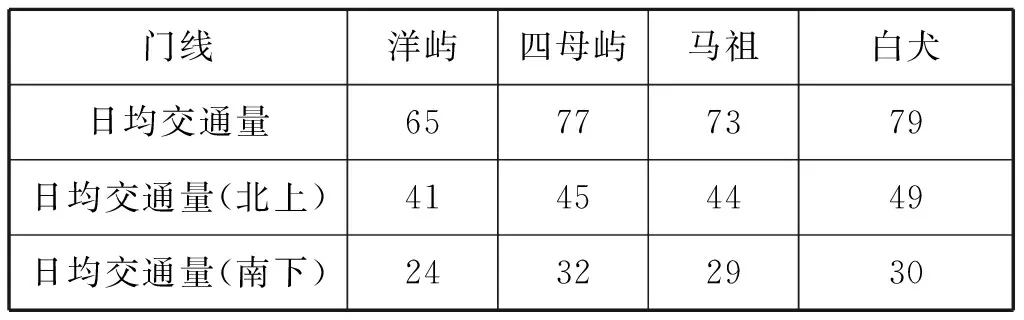
表1 各门线船舶AIS日均交通量统计 艘
由以上数据可知:
1) 所选4个区域日均船舶交通量相当,四母屿和白犬船舶交通量稍大,日均交通量分别达77艘和79艘,其中90%以上船舶船长不超过200 m。
2) 受水域条件和船舶航行习惯影响,所选区域主航迹带宽度均较窄,为1~3 n mile,且距附近岛屿较近(白犬门线除外),其中洋屿和四母屿的主航迹带中心距离邻近岛屿仅约1.5 n mile。
3) 单位区间(1 n mile)内船舶日均交通量>10艘的区域主要在距离岛屿1~6 n mile范围内。门线上单位区间内船舶日均交通量>20艘的区间分布为:距洋屿1~2 n mile,距四母屿4~6 n mile,距马祖园台山1~4 n mile,距梅花浅滩4~8 n mile。
2 闽江口水域船舶定线制的设计
根据对闽江口水域交通流分布特征的分析,该水域船舶交汇密集区域主要集中在七星礁和洋屿灯塔附近(如图1所示),船舶轨迹也较为集中。由于马祖和白犬列岛等由台湾地区管辖,且马祖列岛现存有分道通航制,若对闽江口水域整体设计定线制,将横跨现有的分道通航制。
2.1 定线制形式及参数设置
本文主要采取分道通航制,因此必须确定的尺度参数主要包括通航分道的宽度、长度、轴线走向、边界线离岸或岛屿距离及分隔带的宽度等。结合国内外有关定线制尺度参数设计的规定和理论研究,设定闽江口定线制相关尺度参数的分析过程如下。
2.1.1通航分道宽度
ABDEL[5]提出的船舶间标准分隔的宽度值可作为确定通航分道宽度的依据之一。图5为船舶间的标准分隔示意,其中:外围区域是根据水动力和其他相关因素确定的船舶间的标准分隔;内侧区域是根据水动力因素确定的船舶领域。根据该理论,得到船舶标准分隔的尺度见表2。
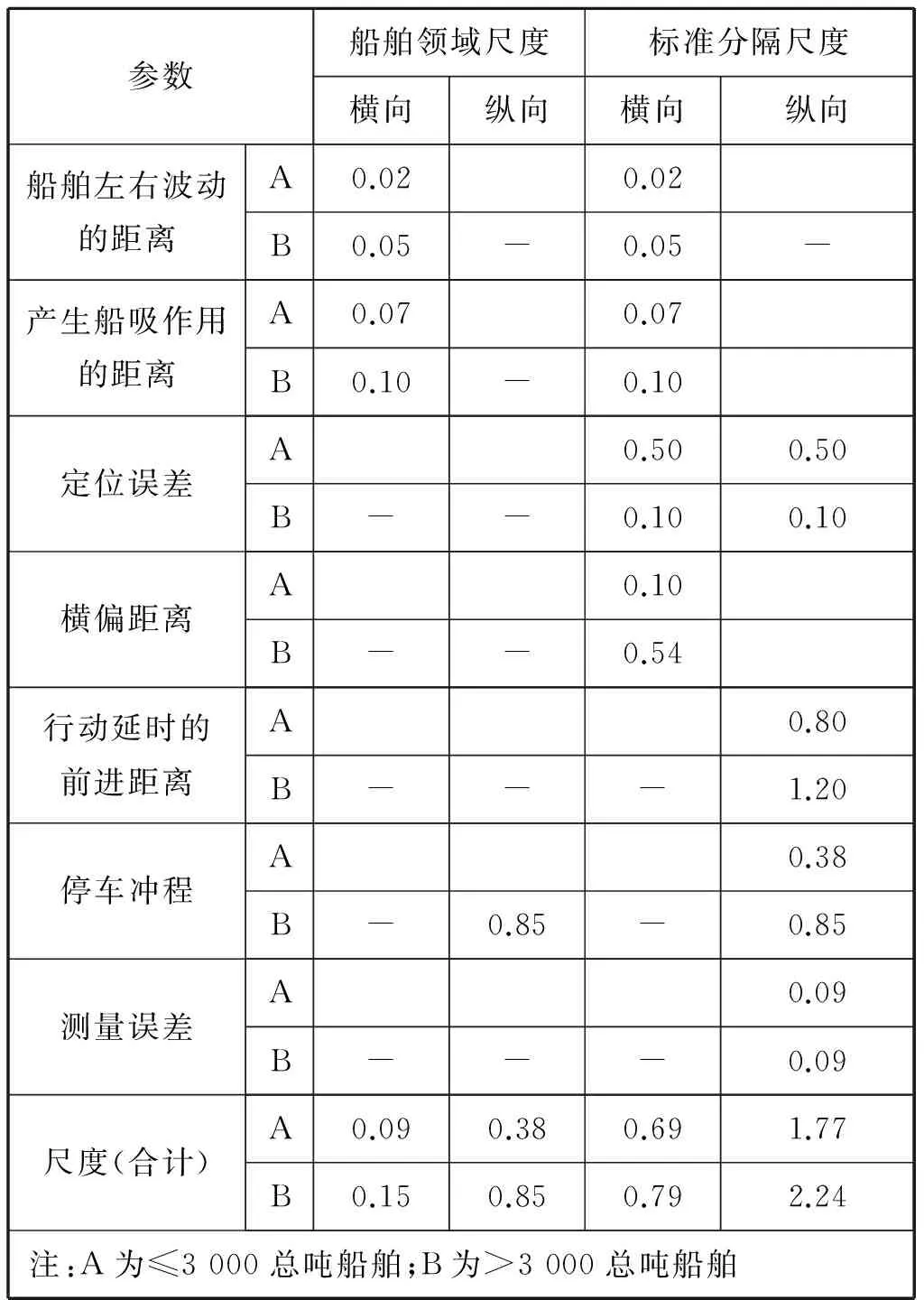
表2 船舶标准分隔的尺度 n mile
目前闽江口水域船舶的最大船长为366 m,考虑日后船舶的大型化发展,取船长为400 m。由表2可知,3 000总吨以上的船舶以相同航向航行时,其标准分隔的横向尺度约为0.79 n mile。实际上,船舶大小、航迹带宽度、定位精度、交通密度、船吸作用和能见度等均是确定通航分道宽度时需考虑的要素。[8]由于七星礁水域船舶航行时受风浪影响较大,考虑到该水域内的通航密度和船舶避风操纵的需求及水域内岛屿众多、航行水域较为狭窄的实际情况,将该水域通航分道宽度取为1 n mile。
2.1.2分隔带宽度
根据IMO对分道通航制的设计要求,在设计分隔带宽度时应考虑水域内可利用的定位手段的精度,在条件允许的前提下,分隔带宽度应至少为对应定位精度的标准误差横向分量的3倍。[9]
本文设计的分道通航制附近均有孤立、显著且容易辨认的近距离物标可供雷达观测定位,如高登岛、七星礁等。在该航行条件下,船员的习惯做法是使用雷达两距离定位或雷达方位距离定位。雷达的特点使得单目标雷达方位距离定位的精度比双目标雷达距离定位低、误差比其大。因此,先计算单目标雷达方位距离定位精度的标准误差,再以该误差为依据确定分隔带和通航分道宽度。
雷达方位距离定位精度的计算式[9]为
(1)
式(1)中:D为物标的距离,n mile;MB为雷达测方位的均方误差,一般取±2°;MD为雷达测距离的均方误差,以观测距离的百分数表示,一般取±1.5%。将以上数值代入式(1)并计算得:M=0.038D。
由以上计算可知,若在闽江口水域使用分隔带,则根据定位精度计算要求,洋屿灯塔附近分隔带宜取0.2 n mile,七星礁水域宜取0.4~0.7 n mile。由闽江口船舶交通流特征分析可知,闽江口南北航行船舶区域集中,航迹带宽度约为1 n mile,而七星礁与台湾地区管辖水域之间水域宽度约为3 n mile(如图3所示),0.4~0.7 n mile带宽的分隔带设计在航迹带中心处时将过多地占用船舶航行的“黄金水道”,会给船舶的航行安全带来一定影响。因此,若在七星礁水域设置分隔带,则分隔带不宜过宽。表3为各航段最大定位误差与分隔带、通航分道宽度。
2.1.3分道通航制长度
本文在设计分道通航制长度时坚持宜短不宜长的原则,并尽量确保通航分道的长度可使船舶在一定时间内保持航向的稳定性,同时兼顾船舶定位的便利性。取船舶保向时间为20 min,船速为10 kn,则得到分道通航制长度的最小值应为3 n mile。
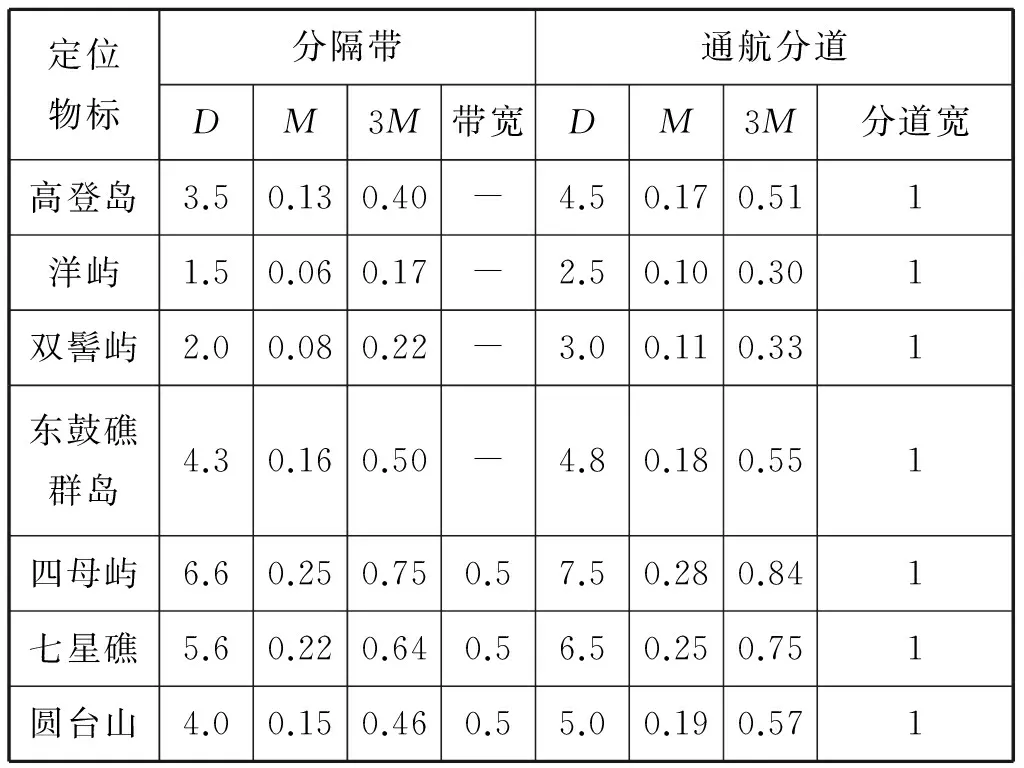
表3 各航段最大定位误差与分隔带、通航分道宽度 n mile
2.1.4轴线与边界线
在设计分道通航制时,应尽可能地使其中心轴线与主航迹带的中心轴线贴近,在满足通航分道和分隔带宽度要求的前提下确定内外边界线的具体位置。
2.1.5警戒区
警戒区用于在通航分道交汇处的规定界限内提醒船舶驾驶员谨慎驾驶。警戒区的形状和尺度主要是在结合国内外已有的经验和对现有船舶交通流的空间分布进行分析的基础上,从对船舶交汇区域的有效覆盖及有利于船舶判断是否进入警戒区2个角度设计。
2.2 定线制方案
2.2.1洋屿定线制设计
洋屿附近的交通流主要为NE-SW向进出闽江口水域及在洋屿灯塔附近转向进出罗源湾的船舶,针对附近的交通形势及地理环境因素,提出定线制方案见图6。
2.2.2七星礁定线制设计
通过对交通形势进行分析可知,七星礁附近的船舶交通流较为集中,对遇形势明显,船舶交通流在七星礁南北及闽江入海口各形成一个交汇区域。七星礁以北为进出闽江口内港区的船舶与南北航行船舶的交汇区,七星礁以南为进出闽江口内港区、海坛海峡和其他南北航行船舶的交汇区。考虑以上交通形势,共提出3种定线制方案,具体布置及设计参数见图7和表4。
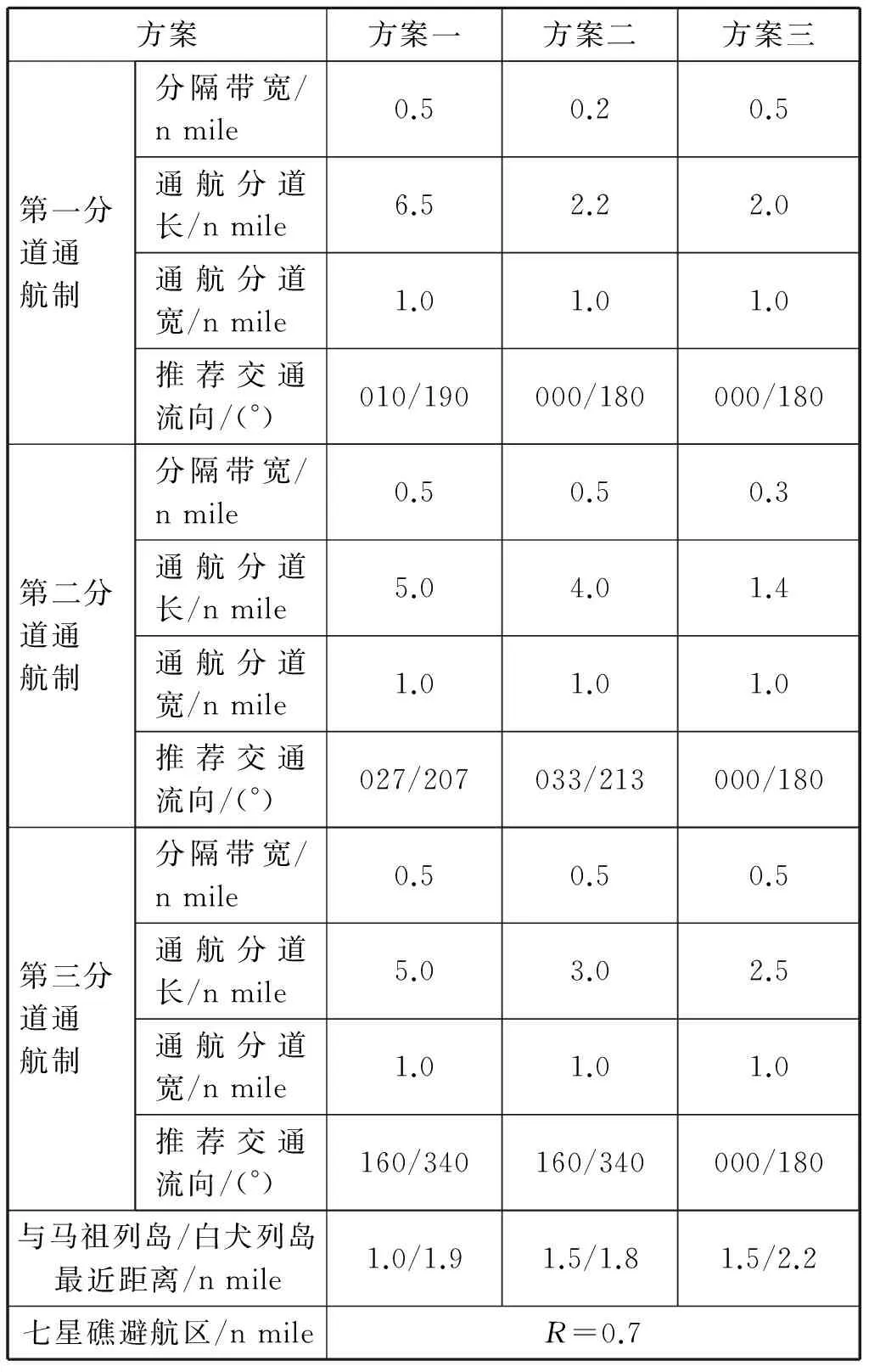
方案方案一方案二方案三第一分道通航制分隔带宽/nmile0.50.20.5通航分道长/nmile6.52.22.0通航分道宽/nmile1.01.01.0推荐交通流向/(°)010/190000/180000/180第二分道通航制分隔带宽/nmile0.50.50.3通航分道长/nmile5.04.01.4通航分道宽/nmile1.01.01.0推荐交通流向/(°)027/207033/213000/180第三分道通航制分隔带宽/nmile0.50.50.5通航分道长/nmile5.03.02.5通航分道宽/nmile1.01.01.0推荐交通流向/(°)160/340160/340000/180与马祖列岛/白犬列岛最近距离/nmile1.0/1.91.5/1.81.5/2.2七星礁避航区/nmileR=0.7
2.3 七星礁定线制方案比选
(1) 方案一:仅分隔南北航行船舶交通流。对闽江口水域交通流进行统计分析可知:南下进闽江口内港区(或出闽江口内港区北上)的船舶日交通量为16艘,出闽江口内港区南下(或北上进闽江口内港区)的船舶日交通量为20艘,船舶交通流相对较少,可不考虑对其进行分隔。该方案严格根据船舶习惯航法设计,分道通航制与七星礁之间的距离较远,形式明了,警戒区的范围较小,有利于减少船舶在警戒区内航行的时间,减轻在警戒区内航行的压力;但是,简单地进行警戒区设计未有效简化警戒区内的交通组织,较大的交通流量使得警戒区内的航行压力和监管压力均较大。
(2) 方案二:对南北航行船舶和进出闽江口内港区船舶交通流均进行分隔。该方案主要考虑南北向航行的船舶会遇和在水域范围内交汇的情况,将进出闽江的船舶考虑在内,对其进行一定引导,并在警戒区内设置分隔带和推荐交通流向,对区内交通流进行分流和引导。大范围警戒区的设置可减小警戒区内的船舶交通密度,但会对主管部门监管船舶航行提出更高要求。
(3) 方案三:简化方案,不对七星礁南部交通流进行分隔。由于目前七星礁南部交汇区至海坛海峡方向的船舶多为小型船,可暂不考虑。该方案去除方案一和方案二中的第二分道通航制,并对警戒区范围进行调整,着重考虑南北线较大船舶交通流的分流。简化后的方案更易于实施,但也会在一定程度上影响水域内船舶的航行习惯。
李松等[10]和邬惠国等[11]发现船舶定线制中的警戒区是事故多发区域,因此深入分析警戒区内的交通组织特征,并运用交通冲突技术对警戒区航行危险度进行识别和诊断,提出对应的优化和修正措施。
提高警戒区交通安全性的一个重要原则就是减少冲突点。[12]方案三对七星礁南部交通的组织进行了简化,因此交通冲突点(见图8和表5)明显少于方案一和方案二,船舶操纵难度也会随之降低。方案一和方案二中的第二分道通航制主要为小船习惯航线,较为复杂,目前实施存在较大难度。方案三虽然会在一定程度上改变该水域内船舶的航行习惯,但其更有助于理清水域内的交通组织,实施起来更为容易。因此,将方案三作为闽江口定线制一期的推荐方案。

方案方案一方案二方案三警戒区第一警戒区第二警戒区第一警戒区第二警戒区第一警戒区第二警戒区交叉点819-11合流点415-11分流点415-11合计16319-33总计19196
考虑到进出闽江口内港区及去往海坛海峡和台湾海峡的船舶交通流量及密度不断变化,有必要对七星礁水域的交通流作进一步的梳理,二期实施方案可从方案一与方案二中选取较优者。
3 结束语
本文根据闽江口船舶AIS数据,运用ArcGIS平台对轨迹分布、交通量等船舶交通特征进行分析研究。根据IMO有关规则、参考国内外类似水域定线制规划的思路,确定闽江口水域定线制的规划原则、
形式及各设计要素的参数取值,提出几种符合闽江口水域通航特征的船舶定线制方案。从交通冲突、方案可行性等方面对各方案进行比选后得出推荐方案,该方案具有以下优点:
1) 在尽可能保持现有船舶交通流不变的同时,兼顾航行安全要求,与周边岛屿保持适当的距离。
2) 对洋屿至白犬列岛间狭长水域南北向交通流进行分离,使有限的海域资源发挥更大的作用,在提高通航效率的同时保障航行安全。
3) 考虑到方案的可行性及福州港的远期发展,将七星礁水域分为2期规划,既能满足管理及功能性需求,又能顺利衔接。
闽江口水域定线制的研究及定线制方案的提出对指导闽江口水域船舶安全航行、提高航行效率和缓解海事主管部门的监管压力具有重要意义。
[1] IMO. General Provisions On Ships’Routeing[S].1977.
[2] CHRISTIANSEN M, FAGERHOLT K, RONEN D. Ship Routing and Scheduling: Status and Perspectives[J]. Transportation Science, 2004, 38(1):1-18.
[3] 许文华. 分道通航制设计的规律性研究[D]. 大连:大连海事大学, 2012.
[4] 藤井弥平,卷岛勉,原诘. 海上交通工学[M]. 东京: 海文堂, 1981.
[5] ABDEL E M G. Marine Traffic Organization in International Waters[C]. Proceedings of 4th International Symposium on Vessel Traffic Services. Brenen, 1981.
[6] LEWISON G R G. The Estimation of Collision Risk for Marine Traffic in UK Waters[J]. Journal of Navigation, 1980, 33(3):317-328.
[7] 吴兆麟,朱军. 海上交通工程[M]. 大连: 大连海事大学出版社,2004: 49.
[8] ZHANG Hao, XIAO Yinjie, LI Song. Agent Based Simulation Architeeture for Ships’routeing[C].Intenational Conference on Computer and Automation Engineering, 2009:147-150.
[9] 郭禹.航海学[M].大连:大连海事大学出版社,2005: 93-94.
[10] 李松, 邵敬礼. 水上交通冲突技术在船舶定线制警戒区中的应用[J]. 水运工程, 2010(7):111-115.
[11] 邬惠国, 李松, 肖英杰. 基于水上交通冲突技术的船舶定线制警戒区安全评价[J]. 水运工程, 2012(6):58-62.
[12] 李松, 周江华, 徐庭留,等. 基于交通冲突技术的船舶定线制警戒区优化设计[J]. 中国航海, 2013, 36(1):95-100.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
军事文摘(2022年17期)2022-09-24
中国交通信息化(2022年5期)2022-07-23
心声歌刊(2021年4期)2021-12-02
福建基础教育研究(2020年2期)2020-05-28
红土地(2019年10期)2019-10-30
计算机系统应用(2019年6期)2019-07-23
求学·理科版(2016年3期)2016-03-23
汽车文摘(2014年2期)2014-12-14
雕塑(2009年5期)2009-11-30