纯电动汽车动力系统参数设计与匹配研究
2017-03-30 22:15叶斌吴君费鑫沈伟杰
科技资讯 2016年30期
叶斌+吴君+费鑫+沈伟杰


摘要:本文对纯电动汽车的动力系统参数进行设计,应用动力分析软件AVL Cruise进行仿真,对电动汽车爬坡性能、加速性能、最高车速性能等验证,以实现动力系统各个部件参数的最佳匹配,充分发挥纯电动汽车整体性能。
关键词:纯电动汽车 AVL Cruise 设计 匹配
中图分类号: U463 文献标识码:A 文章编号:1672-3791(2016)10(c)-0000-00
1、引言
能源匮乏与环境污染问题是限制传统内燃机汽车发展的两大重要因素,也是21世纪全人类面临的主要挑战,而纯电动汽车可以实现零排放,帮助人类更加合理的利用能源,所以各个国家都大力支持纯电动汽车的发展。现在是纯电动汽车发展的初期,在纯电动汽车多年研究过程中已经解决了很多技术方面的问题,但是还是存在行驶里程短、动力不足、动力电池寿命短等致命缺点,其中整车动力方面,在动力电池和其他技术取得有效突破之前,研究动力系统的参数设计与匹配是提高纯电动汽车性能的重要手段之一。
2、汽车基本参数选择
在进行纯电动汽车性能计算时首先应确定纯电动汽车的基本参数,它主要包括整车的质量(整备质量)、车身与底盘(整车尺寸、车轮滚动半径、风阻系数、滚动阻力系数等)的结构参数
车辆基本参数如下表1所示。
3.1 电机性能参数的选择与匹配
純电动汽车电机具有一定的效率特性,即在一定的转速和功率,对应一定的效率。由于纯电动汽车的能量源是有限的,在选择电机功率时,尽量使电机在实际运转过程中,能够经常处于高效率的范围,以获得较高的能量转化效率。因此根据纯电动汽车的最高车速,加速性能要求,车辆的爬坡性能要求选择电机的额定功率、峰值功率、额定转矩、最高转矩、额定转速、最高转速等。即:
其中: 为最高车速时的功率, KW 为最大爬坡度时的功率, KW
为加速时间的功率, KW 为最高车速,km/h
为传动系机械效率 为整车整备质量,kg
为滚动阻力系数 为空气阻力系数
为迎风面积, 为汽车加速末速度,km/h
为最大爬坡度, 为汽车加速时间,s
为爬坡车速,km/h 为额定功率, KW
为电机最大转速r/ min 为后桥速比
为车轮半径,m 为最大转矩,N.m
为比值系数 为变速箱传动比
根据要求及上述公式计算,电机参数匹配结果为:额定功率为80KW, 峰值功率为160KW, 额定转矩125 N.m、最高转矩为290N.m、额定转速4500 r/ min、最大转速9000 r/ min。
3.2 蓄电池性能参数的选择与匹配
电池组数目由汽车行驶过程中的最大输出功率,以及蓄电池的续驶里程来确定,电池组容量由汽车行驶过程中的最大输出功率和消耗的能量确定。即:其中: 为电机最大输出功率 ,KW 电池最大输出功率,KW
为电机工作效率 为电机控制器工作效率
为最大输出功率确定的电池组数目 为续驶里程确定的电池组数目
为电动车续驶里程,km 为行驶1km所消耗的能量,KW
为单节电池额度容量,A.h 为电池组容量,A.h
为单节电池电压 为电池组电压,V
为电池组有效电容量系数 为蓄电池数目
根据要求及上述公式计算,匹配电动汽车蓄电池参数。
4、仿真模型建立
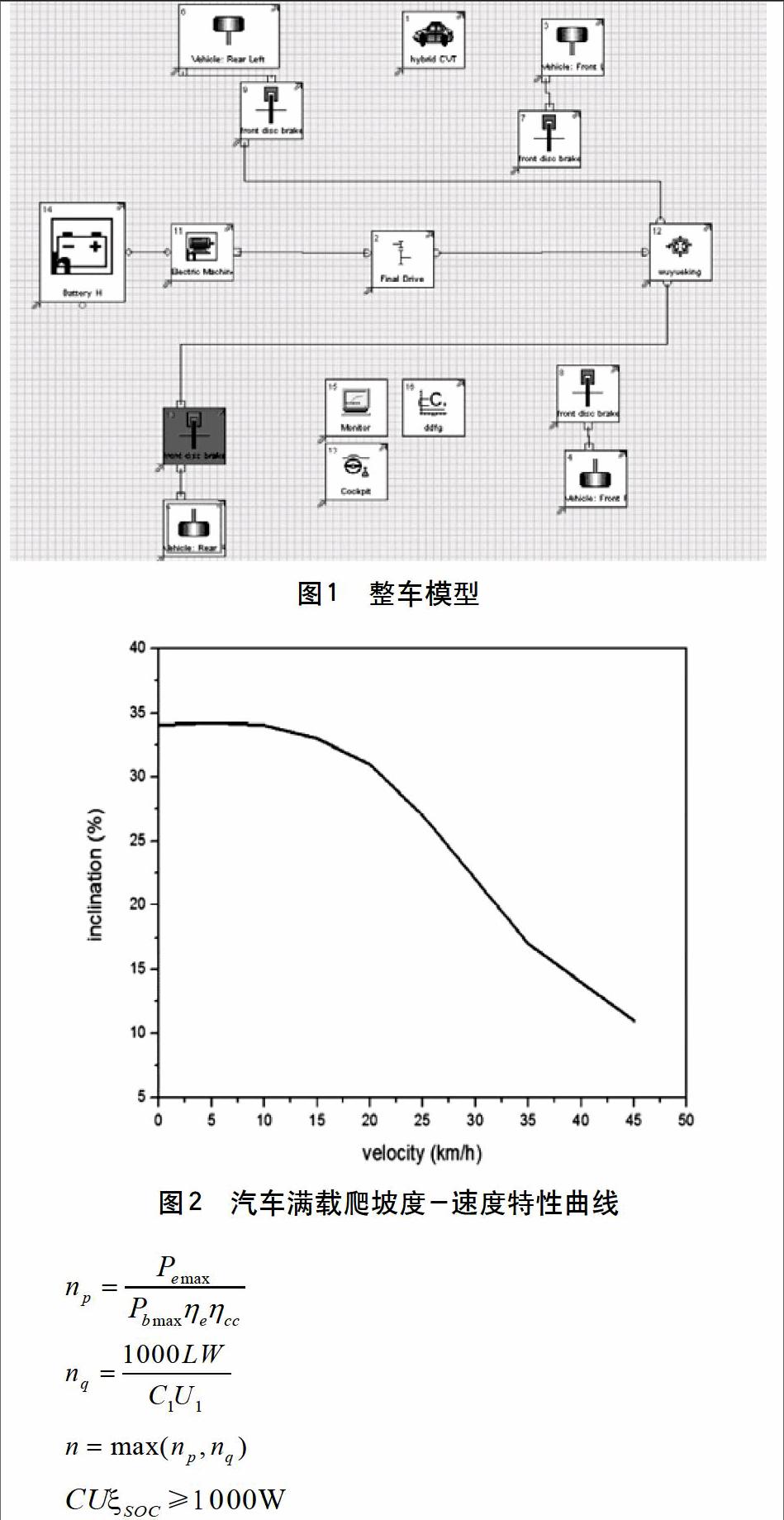
本文应用ALV Cruise软件对纯电动汽车的动力性能进行仿真。整车模型由电池模型、电机模型、变速器模型、差速器模型、车轴模型、制动器模型、驾驶员模型等组成。对每个模块进行具体的参数设置,同时建立部件间的机械、电气和信号连接,最后对满载工况下纯电动汽车的最高车速、百公里加速时间、爬坡度进行仿真,下图为整车仿真模型。
5、仿真结果分析
从图2、图3得出仿真结果为:在车速15km/h范围内,电动汽车能达到最大爬坡度为34%,同时最大速度为140km/h,加速到100km/h时间为11s,小于15 s,达到设计要求。仿真结果表明本文匹配的纯电动汽车参数满足最大车速、加速性和爬坡性等动力性能的要求,说明整车匹配方案合理。
6、结论
纯电动汽车动力系统参数的正确匹配影响其性能。本文通过理论计算,对电动汽车电机和电池进行了匹配计算,同时应用动力仿真软件ALV Cruise进行模拟仿真,结果表明:汽车的最高车速、最大爬坡度及加速时间满足要求,说明利用此方法进行电动汽车动力系统的匹配计算是合理的,为他人研究电动汽车动力性能提供了一种有效方法和手段。
参考文献
[1]辛克伟,周宗祥,卢国良.国内外电动汽车发展及其前景预测,2008.1.
[2]熊明洁,胡国强,闵建平. 纯电动汽车动力系统参数选择与匹配[J].汽车工程师,2011.5
[3] 周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究[D].长春:吉林大学,2011.
[4] 李礼夫,欧光宇. 基于电机能耗的纯电动公交客车主减速比优化方法研究[J] .机械与电子,2014.4
[5] 尹红彬,王越,尤迪.纯电动汽车驱动系统设计及仿真分析[J].农业装备与车辆工程,2014.6
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
青春岁月(2016年22期)2016-12-23
现代经济信息(2016年27期)2016-12-16
移动通信(2016年20期)2016-12-10
科学与财富(2016年15期)2016-11-24
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25
Coco薇(2015年12期)2015-12-10