基于图谱设计方法的水下机器人螺旋桨设计方法
2017-03-29 05:37:59孙端晨
电子科技 2017年1期
孙端晨,卢 曦
(上海理工大学 机械工程学院,上海 200093)
基于图谱设计方法的水下机器人螺旋桨设计方法
孙端晨,卢 曦
(上海理工大学 机械工程学院,上海 200093)
针对水下机器人螺旋桨图谱设计方法中实验次数多、实验周期长、所得到的螺旋桨性能较差等缺陷,文中提出一种结合图谱设计法与升力线理论设计水下机器螺旋桨的方法。利用以升力线理论为基础的Matlab开源程序OpenProp,对水下机器人的螺旋桨进行设计以及性能预测以减小实验测试样品的数量,最终依靠图谱设计方法从中选出最佳螺旋桨。文中所用的方法相比于传统的图谱设计方法可大幅减少实验次数,且根据大量的实验数据显示通过优化后的图谱设计方法设计的螺旋桨相比传统图谱方法可提高5%~10%的敝水效率。
图谱设计方法;升力线理论;螺旋桨设计;水下机器人;OpenProp
螺旋桨性能对于水下机器人的动力性起着重要作用。水下机器人的螺旋桨有别于普通船舶的螺旋桨:(1)由于水下机器人普遍要求的负载不高,电机旋转速度低,因此可不用考虑空泡现象;(2)绝大部分水下机器人在设计的时候为了减轻重量螺旋桨部分用ABS等较轻的材料。由于采用此类材料导致在转速过高或者螺旋桨轮廓过细长时会导致叶片产生一定量的形变,敝水降低效率。
常规设计螺旋桨的方式分为两种:环流理论设计(本文利用升力线理论 )、图谱设计,但是环流理论设计不易为人掌握。应用较为广泛的OpenProp 是美国麻省理工学院近年来根据Kerwin 给出的螺旋桨涡格升力线(PVL)程序在Matlab平台上改进完成的。但该程序无法分析非设计工况下的性能,目前也无法考虑材料因素对螺旋桨的影响以及螺旋桨空化性能。如果需要考虑更多因素则需要采用Lerbs 或Epps 等更加复杂的方式。而当今采用最多的图谱设计方法即通过实验得到的推力系数、转矩系数与进速系数的关系用近似的线性函数或用最小二乘法拟合然后再通过拟合后的曲线选取所需要的螺旋桨参数[9-10],虽方法易被掌握但实验次数多、周期长,所得到的性能较差。
1 水下机器人螺旋桨新设计方法介绍
为解决升力线理论设计螺旋桨的方式时不能考虑材料、空化等较为复杂以及图谱法实验次数多周期长等缺陷,本文提出将两种螺旋桨设计方法结合起来的方法设计螺旋桨,设计方法如图1所示。首先通过环流法理论初步计算出螺旋桨的尺寸参数,由于在理论计算的时候未能考虑到复杂的条件,因此需要在初步设计的螺旋桨的基础上改动螺旋桨的参数,并用图谱法进一步设计螺旋桨。

图1 本文所提出方法的流程图

(1)
(2)
(3)
式中,Z为桨叶数;R为螺旋桨半径;rh为轮毂半径;c为叶截面弦长;CDs为叶截面阻力系数;ρ为水的密度。
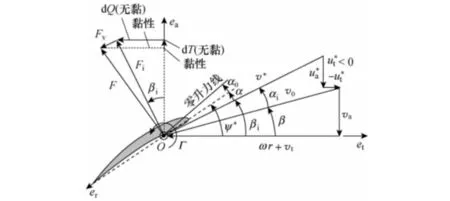
图2 升力线上控制点处速度和力三角形
2 方法验证
本文给出了T168螺旋桨的OpenProp预报结果并与模型浆的敝水实验曲线作了比较。两种螺旋桨的几何要素列于表1。图3和图4中实线是依靠OpenProp预报结果,圆点是模型敝水试验结果。由图可观察到KT、KQ、敝水效率的误差基本相同,与试验结果的平均误差约为2%~10%,最大误差约为10%,因此Openprop的计算可基本预报螺旋桨的输出特性。KT、KQ、η0(敝水效率)计算公式为
(4)
(5)
(6)
(7)
其中,Pτ,PQ分别为螺旋桨的输出功率和电机的输出功率;T是螺旋桨提供的推力;vA是水流的速度;Q是电机提供的转矩;n为螺旋桨的转速;ρ为水的密度;D为螺旋桨旋转直径。

表1 T168螺旋桨的几何要素

图3 T168浆敝水特性比较

图4 T168浆敝水效率比较
2.1 利用OpenProp对螺旋桨的初次设计
本文以某款水下机器人的螺旋桨为例。给定运转工况:设计推力为15.8 N,航速为1 m/s且进流周向分量vTC=vt(r)/vs=0。通常螺旋桨的直径至少为电机转子的1倍,最大尺寸要小于水下机器人尺寸的85%。将以上参数输入OpenProp参数化分析模块中,得到满足设计要求的螺旋桨设计参数组合如图5所示。 OpenProp 参数化分析的结果输出为一个横坐标为螺旋桨直径,纵坐标为螺旋桨效率的曲线图,同时不同颜色的曲线表示不同转速下螺旋桨直径和敝水效率之间的关系。通过曲线图可清晰的看出分别在不同转速时,螺旋桨的效率随着螺旋桨直径先增加后减小且在本例中敝水效率最高可达0.5~0.6之间。为了得到最优化的螺旋桨设计参数组合,取能够达到敝水效率最高点的设计参数组合即转速为1 000 RPM时,螺旋桨直径为0.15 m,并将其输入单个螺旋桨设计模块。由单个螺旋桨设计模块得桨叶无量纲环量、诱导速度、流动角和弦长分布。通过Design Performance 可看出螺旋桨的输出特性如图6所示。其中得到该尺寸螺旋桨的敝水效率约为0.602。

图6 螺旋桨的输出特性
2.2 利用图谱法对螺旋桨的二次设计
由于螺旋桨的形状对螺旋桨输出特性影响较大,而OpenProp的默认参数并不一定是最好的弦长分布参数。通常而言,细长、光滑的螺旋桨效率会更高,但OpenProp在编译时未考虑材料的特性,由于细长的叶片在水中旋转的时候会产生一定量的变形。因此OpenProp并不能准确预测其敝水特性。为了进一步提高螺旋桨的效率,本文利用图谱法设计的方法选择最优化的螺旋桨弦长分布参数。本文列举3组不同的螺旋桨弦长分布参数,如表2所示,图7为进速系数与该3组螺旋桨敝水效率的关系曲线。由图7能得出b号螺旋桨能够达到的最高效率最高为0.62,c号螺旋桨由于弦长分布参数过小而导致在旋转的时候产生一定量的变形从而降低了敝水效率。
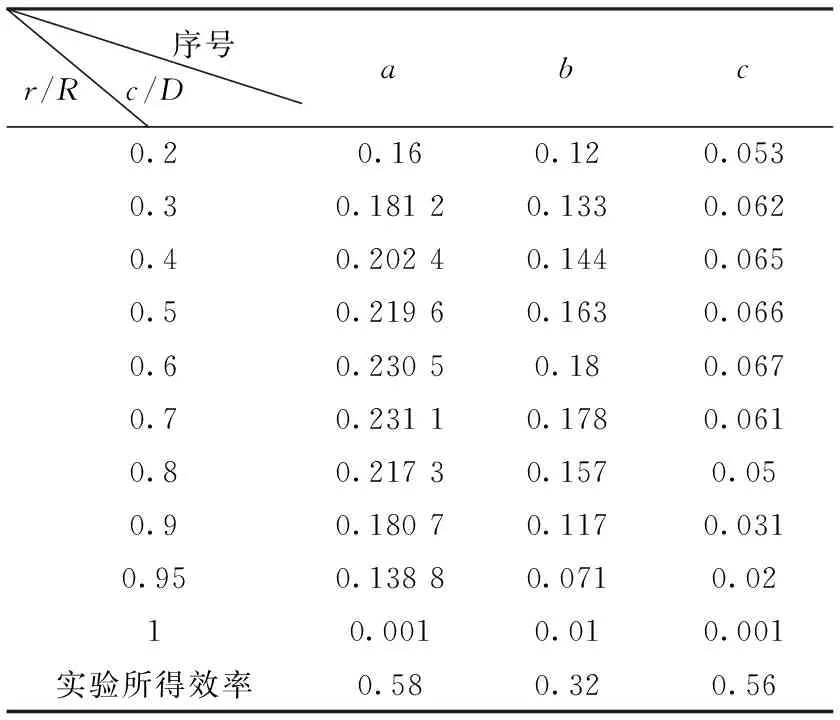
表2 3组不同弦长分布参数以及其能所得到最大真实效率

图7 a、b、c号螺旋桨进速系数与螺旋桨敝水效率的关系

图8 优化后螺旋桨、未优化螺旋桨以及传统方式设计螺旋桨的敝水效率与进速系数的关系
3 结束语
在本文例中,优化后的方法较传统方法设计的螺旋桨敝水效率提高了约为5%,且大幅度减少了实验次数。通过大量的实验证明:
(1)优化后的图谱设计方法相比传统的设计方式大幅度缩短设计时间并可提高螺旋桨5%~10%的效率;
(2)若不计材料变形所带来的影响,基于升力线理论的OpenProp可完全升任低速潜水器的螺旋桨设计。除不包含材料属性外之外,该程序也无法分析螺旋桨空化性能、导管螺旋桨中桨叶与螺旋桨导管之间的间隙及导管的几何形状对螺旋桨输出效率的影响。虽本文所用的OpenProp对于某些复杂的情况不能较好预测,但随着环流理论越来越成熟,更多不同的因素将会得到考虑,计算将会更加真实,得到的螺旋桨的性能将会更加优秀。
[1] Stubblefild J.Numerically-based ducted propeller design using vortex lattice lifting line theory[D].Cambridge: Massachusetts Institute of Technology, 2008.
[2] Chung H.An enhanced propeeler design program based om propeller vortes lattice lifting line theory[D].Cambridge: Massachusetts Institute of Technology, 2007.
[3] D’Epagnier K.A computational tool for the rapid design and prototyping of propeller for underwater after vehicles [D].Cambridge:Massachusetts Institute of Technology,2007.
[4] Brenden P Epps,Richard W.Kimball unified rotor lifting line theory [D].Journal of Ship Research, 2013(4):295-301.
[5] 杨琼方,王永生,黄斌,等.融合升力线理论和雷诺时均模拟在螺旋桨设计和水动力性能预报中的应用[J].上海交通大学学报:自然科学版,2011,45(4):486-493.
[6] Kerwin J.Lecture notes on hydrofoils andpropellers[M].Cambridge,MA:Massachusetts Institute of Technology,2001.
[7] Flood K M.Propeller performance analysis using lifting line theory[D]. Cambridge:Massachusetts Institute of Technology,2009.
[8] Epps B P,Stanway M J,Kimball R W .Openprop an open source design tool for propellers and turbines[C]. USA:Symposium of Propellers and Shafting,2009.
[9] 吴家鸣,邓威,赖华威.回转状态下导管螺旋桨水动力特性的数值模拟[J].华南理工大学学报:自然科学版,2010,38(7):90-96.
[10] 朱克强,李维扬.带缆遥控潜水器空间运动仿真[J].中国造船,1996(3):96-104.
New Design Method of Autonomous Underwater Vehicle Propeller Based on Charts Design
SUN Duanchen,LU Xi
(School of Mechanic Engineering,University of Shanghai for Science and Technology, Shanghai 200093, China)
To solve the defects of needing too many times of experiment、long experimental period and poor performance of the Autonomous Underwater Vehicle propeller design, this paper introduce a way of designing propeller which combines theory design and charts design. Using OpenProp based on lifting line theory for underwater robot propeller design to reduce the number of test samples.Then relying on charts design way to choose a suitable propeller.Comparing with the traditional experimental method, this method can greatly reduce the experiment time and improve the efficiency of propeller. According to a large number of tests show that the method can improve the efficiency of propeller by 5%~10% .
charts design; lifting line theory; design of propeller; autonomous underwater vehicle; OpenProp
2016- 03- 22
孙端晨(1991-),男,硕士研究生。研究方向:水下机器人机械结构。卢曦(1973-),男,博士,教授。研究方向:汽车零部件开发和设计。
10.16180/j.cnki.issn1007-7820.2017.01.040
TP242
A
1007-7820(2017)01-147-04
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:46
装备制造技术(2020年1期)2020-12-25 05:18:18
航空发动机(2020年3期)2020-07-24 09:03:16
空间科学学报(2020年4期)2020-04-22 01:17:20
数学物理学报(2018年6期)2019-01-28 08:57:54
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:36
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47