基于LQR的四轴飞行器控制算法设计
2017-03-29 19:03罗配明
中国市场 2017年9期
关键词:Matlab仿真
罗配明

[摘 要]为有效解决四轴飞行器的稳定性控制响应慢、精度不高的问题,提出一种基于LQR的反馈控制算法;重点描述了四轴飞行器的控制模型、LQR的算法设计原理及稳定性判据、LQR在四轴飞行器控制中的设计步骤,并通过Matlab仿真验证了算法的可行性。
[关键词]LQR算法;四轴飞行器模型;Matlab仿真
[DOI]10.13939/j.cnki.zgsc.2017.09.069
LQR(Linear Quadratic Regulator)即线性二次型调节器,是现代控制理论中较为经典的控制算法,其设计的目标是寻找状态反馈控制器K使得二次型目标函数J取得最小值。[1~2]四轴飞行器又稱四旋翼飞行器,是一个能够在6个活动自由度自由运行,但是控制自由度却只有4个的系统,因此也被称为欠驱动系统。研究四轴飞行器的控制算法,就是针对四轴欠驱动的本质,设计控制算法,使得飞行器能够很好地响应控制指令,并保持性能稳定。[3]
基于以上原因,论文基于LQR算法设计了四轴飞行器的控制回路,通过Matlab仿真验证算法的可行性。
1 四轴飞行器模型
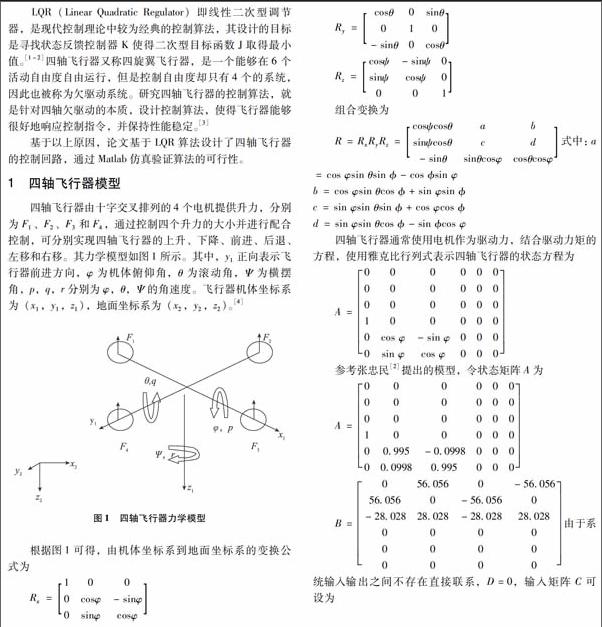
四轴飞行器由十字交叉排列的4个电机提供升力,分别为F1、F2、F3和F4,通过控制四个升力的大小并进行配合控制,可分别实现四轴飞行器的上升、下降、前进、后退、左移和右移。其力学模型如图1所示。其中,y1正向表示飞行器前进方向,φ为机体俯仰角,θ为滚动角,Ψ为横摆角,p,q,r分别为φ,θ,Ψ的角速度。飞行器机体坐标系为(x1,y1,z1),地面坐标系为(x2,y2,z2)。[4]
4 结 论
LQR是现代控制领域的经典算法,通过选择合适的Q和R,就可以使用Matlab来求解状态反馈系数K的值,使用Matlab还可以很好地观察系统的性能曲线,从而可以可以判断系统能否达到稳定的状态。
后续的工作可以继续研究的Q和R的值的取值规律,以便得到性能更好的曲线,还可以研究离散控制情况下,如何使用LQR算法,以便适应飞行器离散控制的特点。
参考文献:
[1]刘丽丽,左继红.四旋翼飞行器的力学建模及LQR控制算法研究[J].机械管理开发,2016(10):1-2,23.
[2]张忠民,丛梦苑.基于线性二次调节器的四旋翼飞行器控制[J].应用科技,2011(5):38-42,60.
[3]宋西蒙.倒立摆系统LQR—模糊控制算法研究[D].西安:西安电子科技大学,2006.
[4]王晓侃,冯冬青.基于MATLAB的LQR控制器设计方法研究[J].微计算机信息,2008(10):37-39.
猜你喜欢
科学与财富(2016年26期)2016-12-01
考试周刊(2016年11期)2016-03-17
现代电子技术(2015年17期)2015-09-23
现代电子技术(2015年18期)2015-09-16
现代电子技术(2015年10期)2015-05-29