太极拳的弹性力学
2017-03-27 09:18:36郭振兴
邯郸学院学报 2017年4期
顾 杰,郭振兴
太极拳的弹性力学
顾 杰,郭振兴
(邯郸学院 太极文化学院,河北 邯郸 056005)
讨论了功架的弹性功能,将文献[1]的弹簧功用弹性力学原理来诠释。推手时人体在外力作用下产生弹性变形,还可以引进攻防所需的有计划的变形。人体弹簧系数可用串联模型来模拟。定量分析证明了“化宜柔,发宜刚”的直观结论。
力学;弹性;人体;模型;太极拳
一、发力和发劲的同异
图1中的手向右方水平方向对一堵垂直的光滑的墙发劲。结果产生一对力:手对墙的向右的力,用黑色箭头表示;墙对手的向左的力,用红色箭头表示。这是一对作用力和反作用力。根据牛顿第三定律,它们大小相等,方向相反。图中攻势水平向右,可以说手向右发劲。手对墙的推力水平向右,可以说手向右发力给墙。本例的发劲和发力差别不大,可以说发劲达到了发力的目的。
图2中的手向右方水平方向对一堵水平的光滑的墙发劲。结果没有产生任何力。图中攻势水平向右,可以说手向右发劲。但是墙水平又光滑,没有力产生。本例发了劲,但没有达到发力的目的。
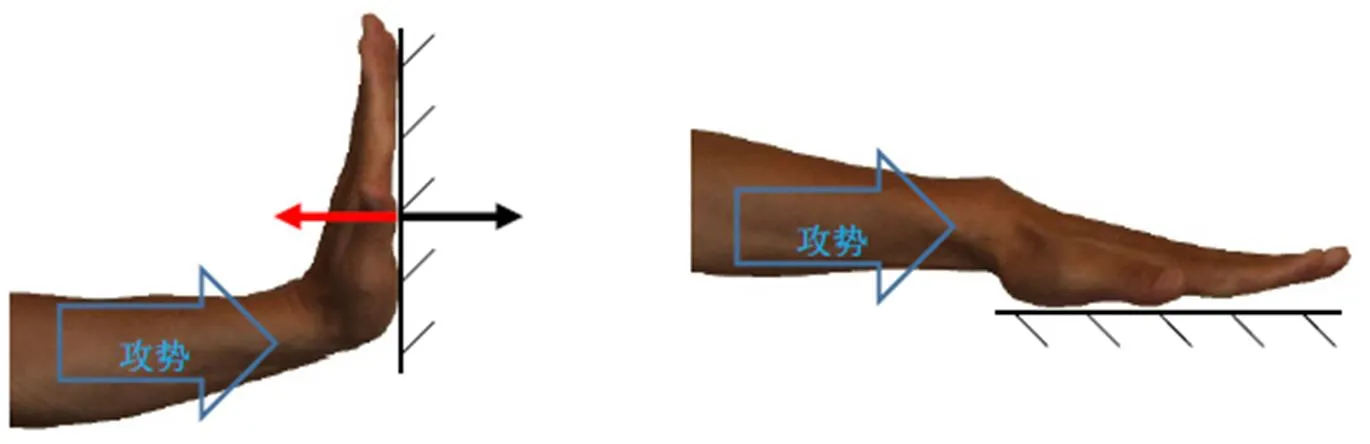
通过这两个例子可以看出,发劲和发力有联系,但不是一回事。什么是发劲,什么是发力呢?在武术界这是一个很有争议的话题。这里将用力学的语言给它们下定义。
发劲的定义:发劲由意念指导形成动量和运用动量。这里的动量包括支撑动量(由地面支持的静态动量)、整体动量和相对动量。
发力的定义:发力是由发劲形成的动量和对方的动量相互作用产生的力。可由意念指导这个力去攻击对方的平衡,同时保持我方平衡。
可见发劲是“知我”的过程,发力则是协调“知我”和“知彼”的对抗过程。
两方接手时的实际情况既不是图1的全数反力,也不是图2的全无反力,而是介于图1和图2之间的弹性作用。
二、水平力的弹性模型
假设我方发一个水平推力,见图3。可以把接手处和上体质心间的机体简化为一个弹簧,把质心和地面间的机体也简化为一个弹簧。
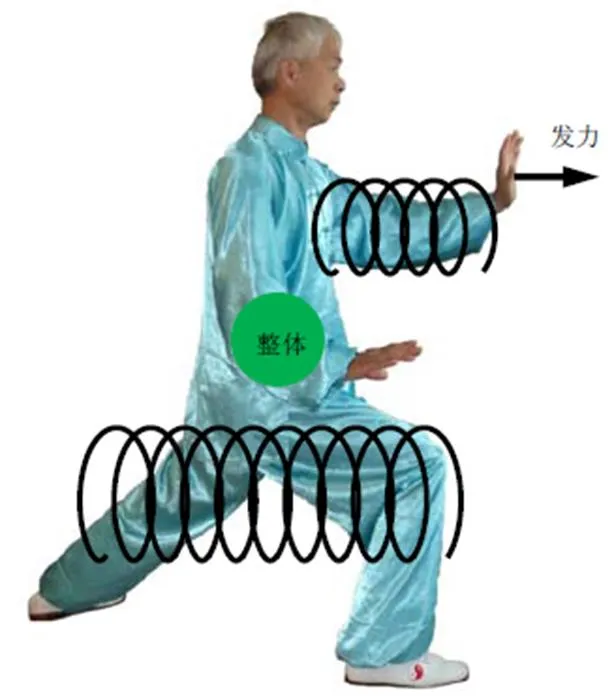
图3 水平力时的我方的弹性模型

力学上这是一个串联体:我方是地面、下盘弹簧、质心、上盘弹簧和接手质量的串联体,见图4左图。两方接手中间将产生力。如果我方发的是水平推力,则这个推力作用于对方。一个大小相等方向相反的反作用力作用于我方,图4左方是我方的隔离体。注意图3中的“发力”的反向力作用于图4左图的我方。类似的可以作出对方的隔离体图,见图4右图。

图5我方胡克定律
可以证明

所以串联弹簧比较软,或者说弹性系数较小。
这是说弹性系数和变位成反比:弹簧越刚变位越小,弹簧越柔变位越大。太极拳要柔中带刚,刚柔相济。太极弹簧功用力学的术语来描述有两个方面:其一是要能刚能柔,即有变化弹性系数的能力;其二是化时宜柔,发时宜刚。
打太极拳时要能刚能柔,即有变化刚柔能力。太极拳的一个要领是“松”,松是内在的要求。而“柔”是外在表现。内在的松首先是意念要指导松,然后有肌肉、关节和韧带的放松。长久的练松可以将松融入下意识的条件反射性行为。松的力学效果是解除僵劲,使关节灵活、韧带富有弹性,肌肉张缩有致。内在的松导致外在的柔,柔的力学效果是进退自如、不丢不顶。这是经典推手理论中的沾和连。可以说松是内功,柔是防御的技术。太极拳并不排除“刚”,只是不主张一味的“刚”。“刚”是外在表现,其对应的内在要求是“劲”。长久的练劲可以将劲融入下意识的条件反射性行为。劲的力学效果是解除僵劲,使关节灵活、韧带富有弹性、肌肉张缩功能强,防时有抵抗功能,攻时有发劲功能。内在的劲导致外在的刚,刚的力学效果是发引自如、借势加力。这是经典推手理论中的粘和随。可以说劲是内功,刚是进攻的技术。这么说内功有松和劲,可以用劲度来度量。劲度的左端是松,右端就是劲,见图6。相应的外在力学效果是柔和刚。可以用弹性系数来度量。弹性系数小(左端)是柔,弹性系数大(右端)是刚,见图7。练左端可以立于不败之地,练右端可以成为长胜将军。练刚柔的变换功能才能臻至上乘功夫。这是经典理论中的阶及神明。
图6 劲的度量
图7 弹性系数的度量

可以证明


图8 对方胡克定律
两方接手连成一体,图9是联合体的隔离体图。这时的作用力和反作用力是为联合体的内力,不在隔离体图中示出。作用于体系的两端是双方脚底的摩擦力。这个力作用于一个由四个弹簧串连起来的弹簧上,在接手处产生变位。
串联弹簧的弹性系数是,


由(8)式可见,作用力随我方弹性系数的增长而增长,见图10。作用力和对方弹性系数的关系类似。弹性系数小就是柔,弹性系数大就是刚。所以柔可以产生小的作用力,这是“化”需要的力学功能;刚可以产生大的作用力,这是“发”需要的力学功能。哪一方都能运用这个柔化刚发的力学原理。
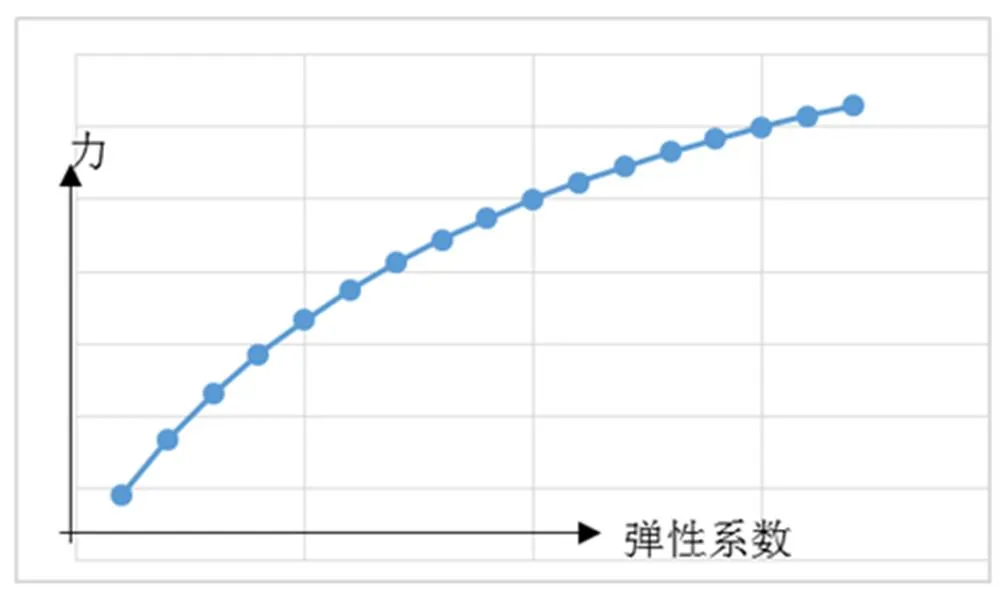
图10 接手联合体的隔离体
解(3)式和(8)式得,

(9)式说明我方变位由总变位分配而来,分配量是我方和对方弹性系数之比的函数。见图11,比值小时我方柔对方刚,我方的变位大;比值大时我方刚对方柔,我方的变位小。粗略的说是变位和我方的柔度成正比:我方越柔,变位越大;我方越刚,变位越小。这个结论对对方也适用。这就是说己方越柔,变位越大;己方越刚,变位越小。在化解时柔度大可以减小力,是有利的方面;但柔度大会引起大的变位,可能会将对方引入己方重心,是不利的方面。所以引进是有限度的,柔度不能太大。
类似的,解(6)式和(8)式得,
由(9)式和(10)式得,
(11)式再次表明两方的变位和两方的弹性系数成反比,和两方的柔度成正比。
由图3和(1)式的考虑,人体由上盘弹簧和下盘弹簧串联而成。由(2)式和(5)式串联弹簧比各自的上盘弹簧或下盘弹簧软。上盘弹簧主要由接手和上体间的肢体构成。手臂撑圆、垂肘等太极要领使工架具有自动的弹性。意念主导的变换接手和上体间的距离使功架具有主动的弹性。下盘弹簧主要由两脚和腰胯间的肢体构成。弓步、坐步等太极步型有一些弯弧处,使工架具有自动的弹性。意念主导的步型变换使功架具有主动的弹性。
由(3)可算出我方接手处的变位。为了算出质心处的变位,先列出下盘弹簧的胡克定律,
解(3)式和(12)式得,
将(1)式代入(13)式得到质心处的变位,
类似的可得到对方质心处的变位,

三、一般情况的弹性公式
攻势的方向一般和发力方向不同。例如图12,水平攻势遇到有摩擦的斜面。这时产生一个正压力分量和一个摩擦力分量,合力一般不再水平,合力通常会有一个垂直分量。又如图13,水平攻势遇到有倾斜的胸平面。这时产生一个法向力分量和一个切向力分量,合力一般不再和攻势方向一致,合力通常会有一个横向分量。

图12 水平攻势斜面
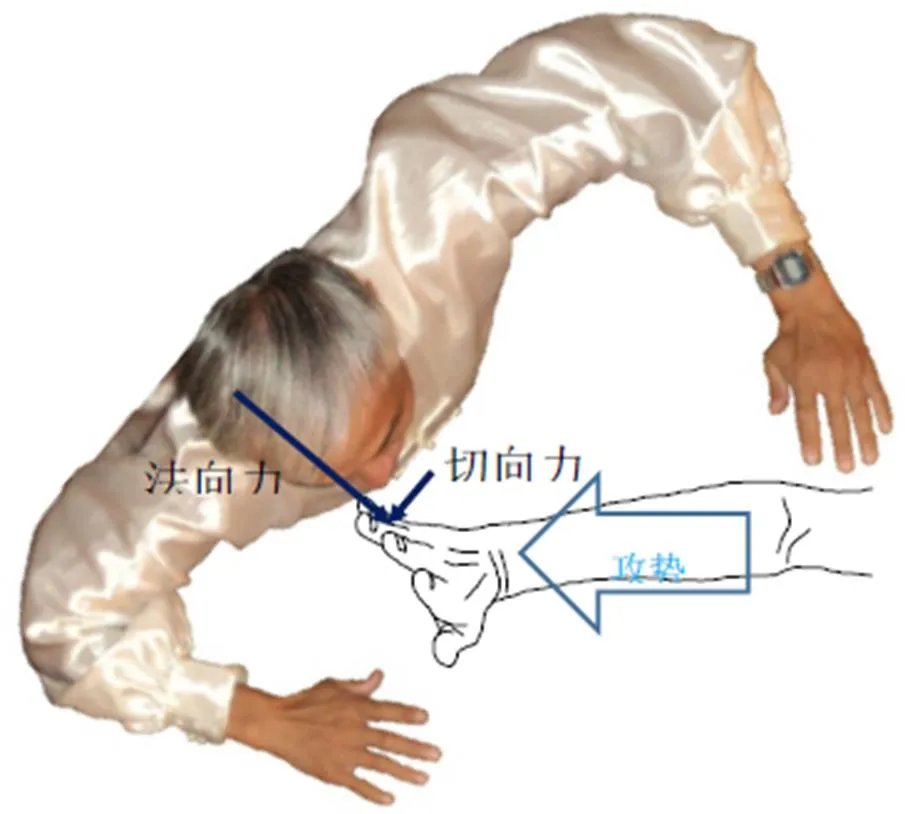
图13 反弹作用力的生成
一个攻势会有三个线性分量,对方接招后产生三个线性发力分量。受对方接招方式的影响,发力的方向一般不和攻势方向相同。
太极推手可以认为是两个刚体的相互作用。刚体的相互作用有六个力的分量:三个线性分量和三个旋转分量。所以一个一般的攻势会有三个线性分量和三个旋转分量,对方接招后产生三个线性和三个旋转发力分量。受对方接招方式的影响,发力的方向一般不和攻势方向相同。攻势包括三个方向的支撑动量、整体动量、相对动量和三个方向的支撑旋转动量、整体角动量、相对角动量。发力包括三个方向的力和三个方向的力矩。
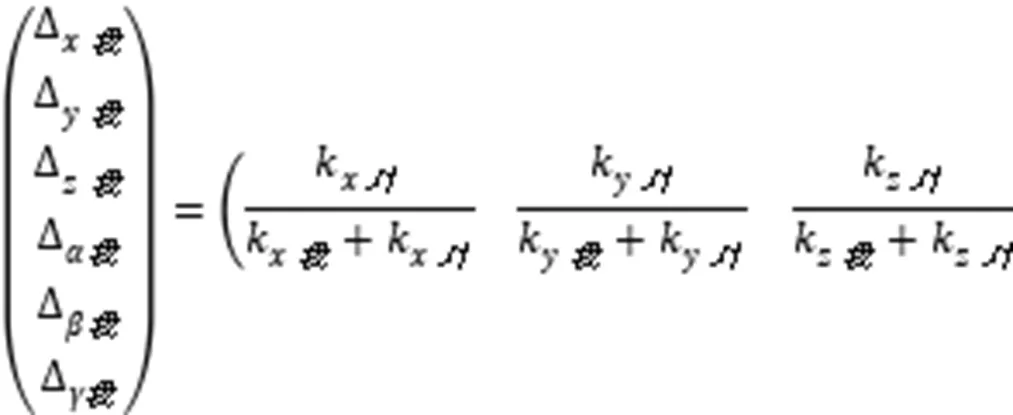
扩展(1)式和(4)式,

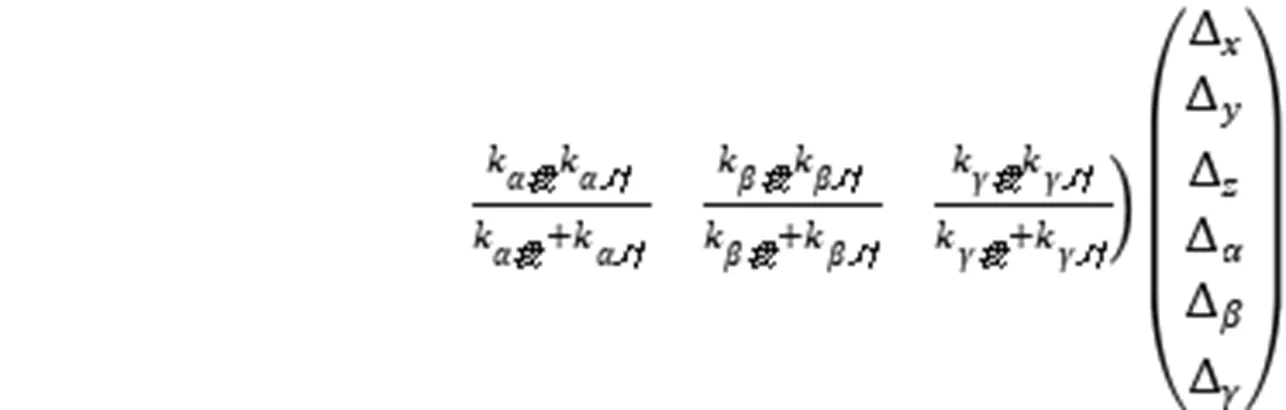
(16)式对我方和对方都适用。(16)式假定人体构成六个串联弹簧,三个线性弹簧和三个旋转弹簧,它们之间没有相互作用。扩展(3)式和(6)式,接手处的弹性公式为:

类似于(8)式,广义力和总变位的关系是:

四、线性理论
广义变位矢量有六个分量,这些分量对人体的位置和角方位都有影响。在计算接手力时[2][3]忽略了这些影响。有两个原因允许或导致了这些忽略。首先,这些变位和人体变位前的位置相比较小,忽略引起的误差不大。其二是计算力时还不知变位,要算出力后才算变位。理论上可以把变位加入原来的位置,重新算力;再由新力重算变位。如此迭代已达合适的精度。迭代法将引入大量的计算,而且其收敛性需要得到证明。
忽略变位对力计算的影响是线性理论。线性理论忽略了变位和力的相互影响,忽略了二阶误差,可用最小的运算量获得足够的计算精度。工业界广泛运用线性理论。
例如绗架的设计,建筑师在计算力时只用绗架的原形尺度(图14),再把力作用于绗架来计算其变形(图15)。建筑师用的就是线性理论。
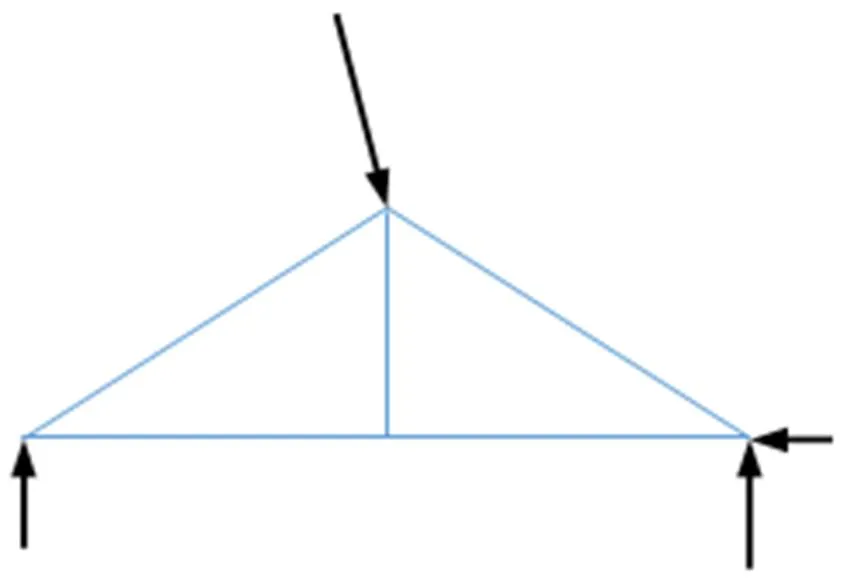
图14 绗架受力
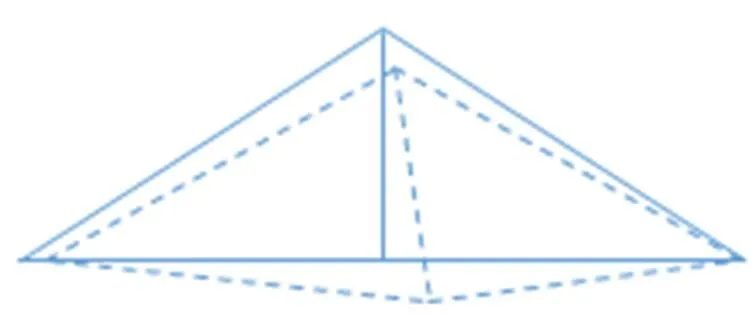
图15 绗架变形
文献[2][3]的接手力的计算和本文的弹性变位计算也运用了线性理论的概念。突出本质,忽略次要因素,简化计算。
五、线性位移和旋转位移,旋转位移和反关节限制
由(17)式可以算出接手处的变位。前三项是线变位,将略微改变接手的位置[2]。 (16)式是串联弹簧的性质。由(16)和(17)式可以将接手出的变位分配给质心处,即算出质心处的六项变位。类似于(14)式和(15)有:

(19)式对两方都适用。这些变位将略微改变质心的位置[2]。如果有必要,接手和质心的线变位可以代入文献[2][3]中的公式作第二轮力的运算。
接手处总位移可以分配给两方,(9)式和(10)式可以推广为:
(17)式、(18)式、(20)式的后三项是角变位。(18)式是总的角变位范围,(20)式是分配给各方的角变位范围。变化范围是在肢体保持弹性功能的最大变位区域,实际的变位还和起始位置有关。见图16,因为“起始位置”介于“弹性始位”和“弹性终位”之间,“实变范围”小于“可变范围”。当角度达到“弹性终位”时,肢体达到反关节运动范围的极限。超过这个极限将引起肢体受损,为了避免受损只能运动其他肢体来避免这个极限。这个避免运动通常和杠杆原理有关,杠杆原理将导致受力方被掀翻。发劲发生在“实变范围”内。
两方对扭时,各自的扭角和自己的弹性系数成正比。但是由于起始位置的选择,离终位的距离不同。


图16 事实变位小于可能变位
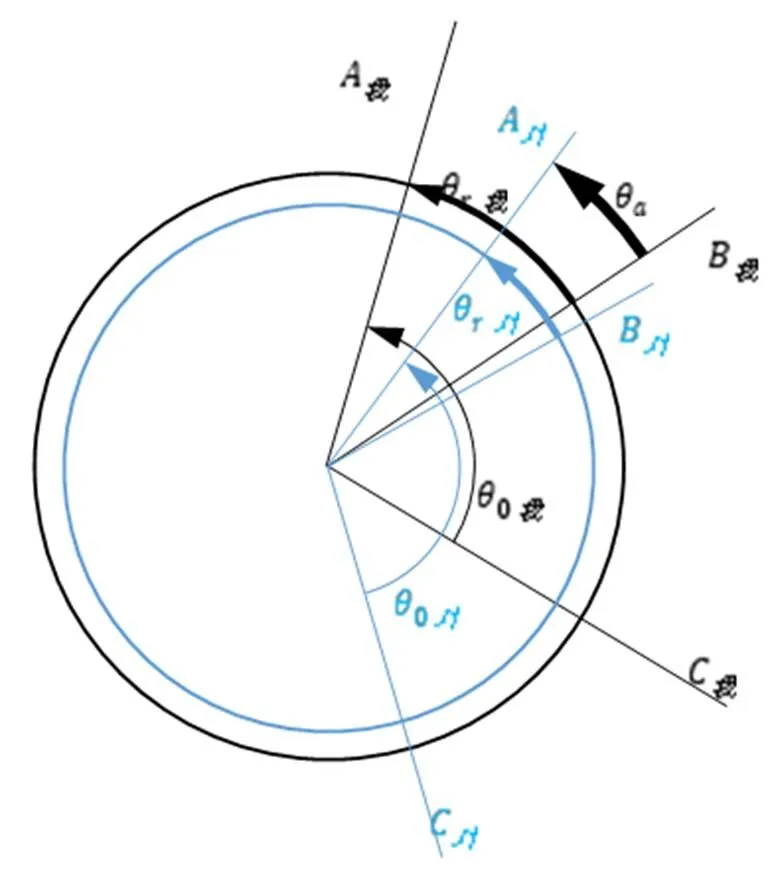
图17 攻方要让对方达到极限
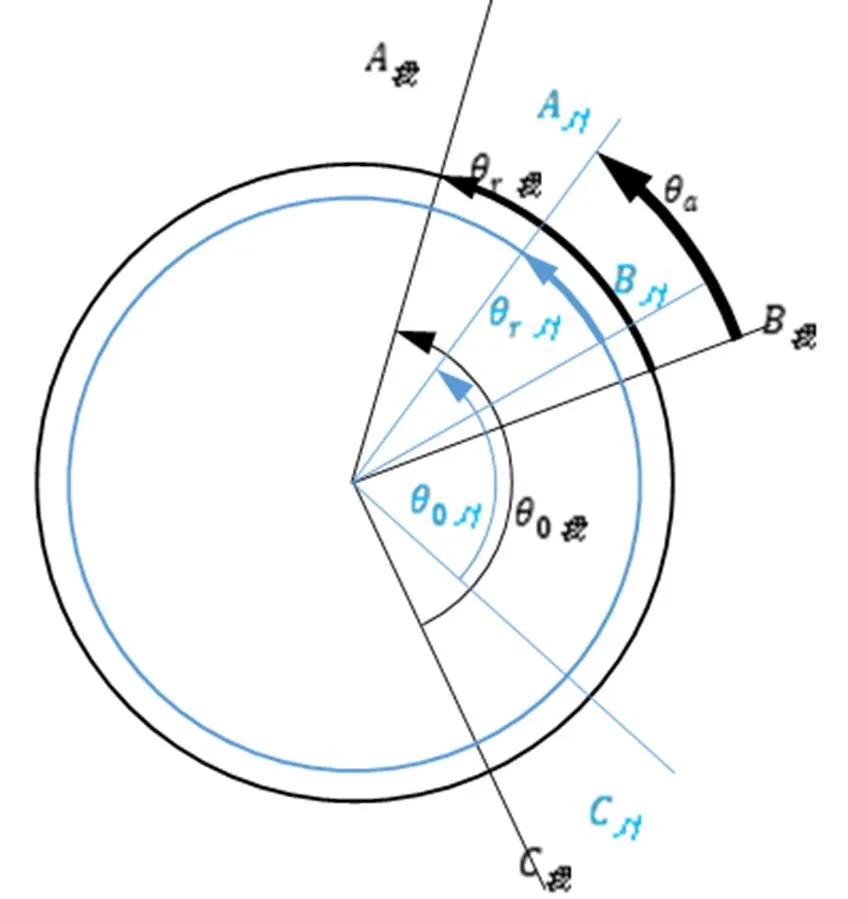
图18 守方要避免己方达到极限

六、分析例子
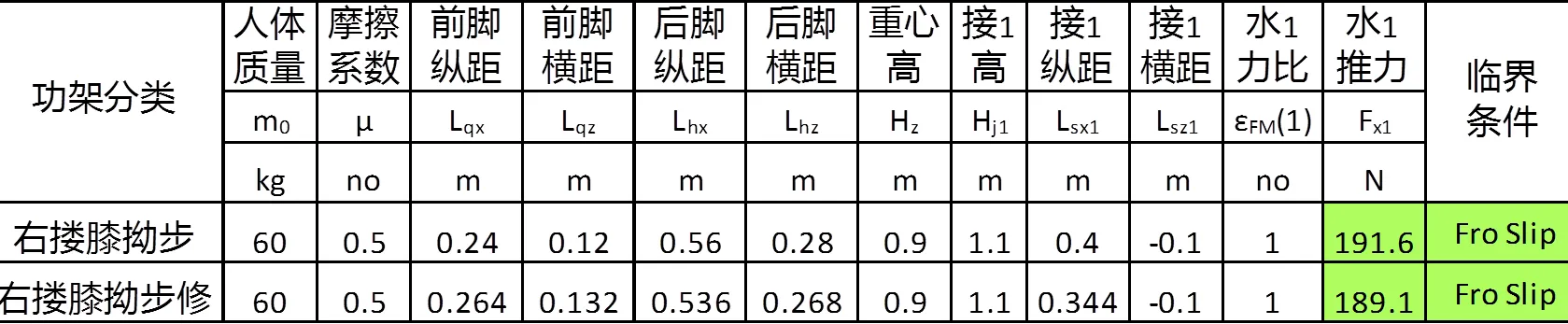
1. 右搂膝拗步
右搂膝拗步见图3。由文献[3]的公式的计算,得出表1。
表1 右搂膝拗步的水平临界力计算


由(17)式第一式得接手处变位,

由(19)式第一式得质心处变位,

2. 倒撵猴
倒撵猴的旋见图19。由文献[3]的公式的计算,得出表2。

图19倒撵猴的旋
表2 倒撵猴的旋转临界力矩计算


由(18)式第四和六式得总的角变位,

由(20)式第四和六式用于我方接手处变位范围是,

由(20)式第四和六式用于对方接手处变位范围是,

图20攻方要让对方达到极限
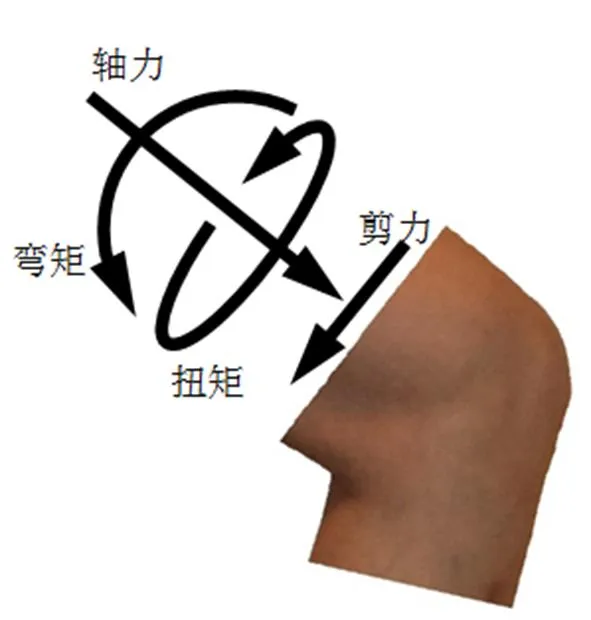
图21 膝关节内力
七、太极拳弹性力学中量的分析方法
弹性系数可以通过实测来得到,当然因有好多种功架,实测的工作量可能很大。弹性系数还和接触状况有关,这样就有更多的组合需要测量。弹性系数也可以通过计算求得。可以将肢体简化成弹性材料,根据几何尺度、功架形状、接触状况来计算。也可以用有限元方法来计算弹性系数。
根据求得的接触力、人体重力、地面对人体的正压力和摩擦力可以计算肢体的内力。内力有轴力、剪力、弯矩和扭矩,见图21。进一步可以计算内应力,内应力有正应力和剪应力。
还可以计算变形。功架的各点的变形可以算出,因而可求得功架形状的变形。可以计算应变,应变有正应变和剪应变。
本文的模型用了准静态的概念,即动态的过程平稳而没有振动。真正的动态过程在理论上是可以模拟的。
今后的工作可以用有限元分析推手的动力学过程。建立两方联合体的隔离体,定出接手处的连接条件,定出各方和支撑面的边界条件。对联合隔建立弹性或粘弹体的有限元。建立人体的支撑动量、整体动量、相对动量的有限元模型。根据失根和打滑条件分析该动态模型,解算出那方得胜及其临界广义力。计算各方的变位、变形、应力应变。计算反关节运动的限制。
[1]顾杰.太极拳弹簧功[J].太极,2013(2,3,4,5,6).
[2]顾杰,郭振兴,卢建辉.太极拳力学[M]. 北京:北京理工大学出版社,2016.
[3]顾杰,恩杰,郭振兴. 用多力的立体模型分析太极拳的静态和动态攻防功能[J]. 邯郸学院学报,2017(1).
(责任编辑:苏红霞 校对:李俊丹)
G852.11
A
1673-2030(2017)04-0070-11
2017-09-10
顾杰(1955—),男,江苏苏州人,邯郸学院太极文化学院客座教授,美国通用汽车公司高级工程师,美国奥克兰大学机械制造博士;郭振兴(1950—),男,河北邯郸人,邯郸学院太极文化学院原院长,高级政工师。
猜你喜欢
高中数理化(2024年8期)2024-04-24 05:21:33
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27 02:30:46
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20 13:23:44
人大建设(2018年10期)2018-12-07 01:13:54
领导决策信息(2017年42期)2017-12-15 03:34:58
领导决策信息(2017年12期)2017-05-17 04:49:17
农家书屋(2016年9期)2016-05-14 03:43:36
云南畜牧兽医(2015年4期)2015-02-28 21:26:12
建筑机械化(2015年7期)2015-01-03 08:09:02
当代畜禽养殖业(2014年5期)2014-08-31 02:50:56