制造业——物流业协调发展的无模型控制方法研究
2017-03-27 18:25郑飞李逢玲
物流科技 2017年2期
关键词:协调发展
郑飞+李逢玲


摘 要:根据动态大系统的多层递阶结构思想,讨论了制造业——物流业系统协调发展的无模型控制问题,建立了相应的无模型控制算法,并通过佛山市制造业——物流业系统的实证分析,证明其效果是良好的。
关键词:制造业与物流业;协调发展;无模型控制
Abstract: On the basis of the idea of the multilayer hierarchical structure of dynamic large-scale system, the model free control law for the coordinated development between manufacturing industry and logistics industry are discussed and the corresponding model free algorithm is set up. And then, by the empirical analysis on manufacturing industry and logistics industry system in Foshan city, the best results are explained.
Key words: manufacturing industry & logistics industry; coordinated development; model free control
引 言
制造业与物流业的联动与协调发展,是理论界与政府热议的论题之一。经济新常态下,产业间的竞争日趋激烈,在深化劳动分工、促进产业结构调整、构建产业核心竞争力以及推动区域经济协调发展等方面,物流业发挥着重要作用。制造业是国民经济的支柱产业,其快速发展需要物流业的支撑,同时制造业的发展也有利于物流业的发展壮大。各地根据国务院2009年颁布的《物流业调整和振兴规划》的精神,制定了本地的相关物流产业规划。2009年12月,广东省政府印发了《广东省物流业调整和振兴规划》,提出促进广东现代制造业与物流业有机融合与联动发展,为广东省物流业的稳定与发展制定了行动方案。2015年5月国务院发布的《中国制造2025》提出,通过“三步走”实现制造强国的战略目标。根据佛山市制造业发展的现状,佛山市在十三五规划中明确提出,到2020年将佛山建设成为中国制造业一线城市。
在当前产业状况和经济环境方面探讨制造业与物流业的协调发展方面,思路多样,主要从制造业物流外包角度、物流业的发展、两业联动的发展模式等方面进行了研究,所有这些研究都认为制造业与物流业通过相互衔接、互为依托,协调发展,不仅有利于制造业与物流业的发展,而且是调整产业结构、实现经济增长方式转变的重要途径。但对如何对制造业——物流业系统的发展实施有效控制的研究却甚少。
由于現有研究制造业——物流业系统控制问题的资料较少,因而在把制造业——物流业系统协调发展研究与现代控制理论结合起来的过程中,不容易建立起制造业——物流业系统协调发展的数学模型。人们在控制理论及其应用过程中发现,对于某些被控对象,要实施有效的控制策略并不容易。经典PID控制尽管不需要数学模型,但只能应用于非时变的单输入单输出系统;而智能控制由于包括了领域的专家知识和某些推理结构,而存在一定局限性。同时因对制造业——物流业协调发展的研究,不仅涉及到制造业子系统和物流业子系统本身,而且也会涉及到社会经济的许多其他因素,不可能面面俱到。为此,本文讨论不依赖于被控对象数学模型的自适应控制律(无模型控制)以及制造业——物流业系统协调发展的无模型控制方法。
1 制造业——物流业双向控制的大系统结构
根据大系统的多层递阶结构思想,可以设计并建立制造业——物流业协调发展的多级递阶结构如图1所示。
在图1中,最低级(第一级)为制造业——物流业基本模拟模型与局部控制系统。它是一个模型族。在大量调查的基础上,使用行业发展预测模型、投入产出模型等,可以模拟制造业与物流业的发展现状,进行制造业——物流业系统的评价,将基础信息目标要求、各种约束条件及有关数据要求等传递给中间级(第二级);同时接受中间级的控制要求,对子系统内的被控对象进行控制,如配套市政建设、产业转型升级、推进绿色生产、政策法规体制等。
中间级(第二级)为制造业——物流业双向协调控制模型。该级的功能是:(1)分析协调满足制造业——物流业系统多目标要求的各种约束条件;(2)通过大系统自适应协调控制手段,向下对制造业——物流业系统进行双向协调控制,向上提供制造业——物流业协调发展的最优(或次优)策略方案及综合数据信息。
最高级(第三级)为多层次领导决策层。该层通过协调发展指数,采用无模型控制方法,根据当时的社会经济状况,建立相应的综合评价指标和最优的实施方案,从而实现制造业——物流业协调发展的战略目标,为决策者决策服务。
2 制造业——物流业双向协调控制模型
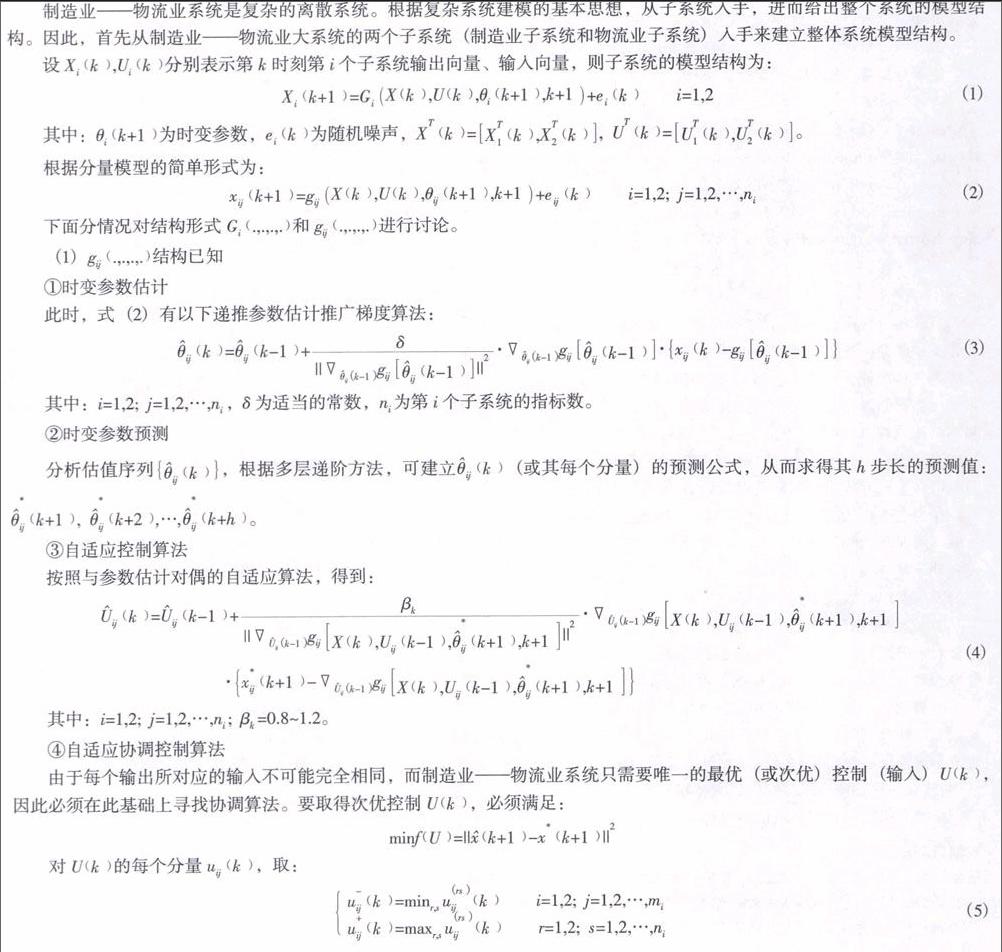
制造业——物流业系统是复杂的离散系统。根据复杂系统建模的基本思想,从子系统入手,进而给出整个系统的模型结构。因此,首先从制造业——物流业大系统的两个子系统(制造业子系统和物流业子系统)入手来建立整体系统模型结构。
设Xk,Uk分别表示第k时刻第i个子系统输出向量、输入向量,则子系统的模型结构为:
3 佛山市制造业——物流业双向协调控制
佛山市是珠江三角洲仅次于广州与深圳的高速发展的地级市,为了实现2020年成为国内制造业一线城市的目标,必须做大做强物流业,发挥第三利润源泉——物流的作用,实现制造业与物流业的协调发展。根据时变参数系统的预测方法及《佛山市统计年鉴》中的数据,对佛山市制造业——物流业系统各指标进行预测,结果如表1、表2所示。
实现佛山市制造业——物流业协调发展,不是一蹴而就、盲目冒进就可以完成的,是个渐进的过程,因此在进行控制时只能进行适当的调整。假设2019年各状态指标的期望值为:
x=170 000 000, x=260, x=6 000, x=300 000 000, x=90 000 000
x=11, x=195 000, x=850 000, x=42 000, x=6 900 000, x=7 400
根据不依赖被控对象数学模型的控制方法(无模型控制),可以得到2018年佛山市制造业——物流业控制系统相应的次优控制值为:
制造业全社会固定资产投资(万元)u=11 089 753
交通运输仓储业和邮电业全社会固定资产投资(万元)u=4 278 615
由此可以看出,采用无模型控制方法,佛山市2018年可以在适当增加制造业与交通运输仓储业和邮电业全社会固定资产投资的情况下,就可使制造业——物流业控制系统的各项指标达到预想的目标。
4 结 论
本文提出的制造业——物流业协调发展的无模型控制方法,用“小扰动”手段,结合佛山市的实际,理論性强,结构简单、实用,可操作性强,能够有效地应用到大系统的次优控制策略中,在制造业——物流业协调发展方面具有广阔的应用前景。由于所选指标的局限,可能由于未考虑的因素,因为最终的次优控制结果与佛山市的实际情况会有出入,但并不会影响模型本身的理论性与实际操作性。
参考文献:
[1] 董千里,张林,申亮. 制造业与物流业联动发展的产业协调度研究[J]. 技术经济与管理研究,2015(3):119-123.
[2] 陶晶. 中国物流产业与区域经济协调发展的关系与策略研究[J]. 商业经济研究,2015(35):29-30.
[3] 汤兵勇,郑飞. 区域经济可持续发展的无模型控制[J]. 黑龙江大学自然科学学报,2001(3):30-34.
[4] 梁红艳. 物流业发展对制造业效率影响机制研究[J]. 东南学术,2015(1):88-97.
[5] 郑飞,李逢玲. 制造业与物流业协调发展控制模型研究[J]. 物流工程与管理,2016(11):37-38.
[6] 刘刚桥. 佛山物流业发展现状与对策研究[J]. 物流工程与管理,2015(1):18-20.
猜你喜欢
现代经济信息(2016年27期)2016-12-16
合作经济与科技(2016年24期)2016-12-07
时代金融(2016年29期)2016-12-05
智富时代(2016年12期)2016-12-01
智富时代(2016年12期)2016-12-01
商(2016年33期)2016-11-24
商(2016年33期)2016-11-24
大经贸(2016年9期)2016-11-16
商(2016年27期)2016-10-17