
基于改进暗通道算法的雾天车辆偏离预警研究
2017-03-24 06:45:37周劲草张在吉
东北师大学报(自然科学版) 2017年1期
周劲草,魏 朗,张在吉
(1.长安大学汽车学院,陕西 西安 710064;2.中国民航大学智能信号与图像处理重点实验室,天津 300300)
基于改进暗通道算法的雾天车辆偏离预警研究
周劲草1,魏 朗1,张在吉2
(1.长安大学汽车学院,陕西 西安 710064;2.中国民航大学智能信号与图像处理重点实验室,天津 300300)
针对在雾天工况下仅凭常规车道线识别方法无法准确提取车道线这一现状,给出了一种基于改进暗通道算法的雾天车道线识别算法.首先利用基于双边滤波器的暗通道算法对雾天工况下的图片进行去雾并对去雾图像进行亮度修正;然后利用Sobel算子和大津法得到包含清晰道路边缘的二值化图像;最后利用Hough变换对车道线精确提取.实验表明:该算法能够在雾天工况下对车道线进行准确、快速地识别;与常规算法相比,该算法具有更高的准确性和实时性,对于提高雾天车辆主动安全性具有较大意义.
车辆主动安全性;雾天;双边滤波;车道偏离预警;图像去雾
0 引言
近年来雾天正逐渐在各个方面影响着人们的生活,尤其是在交通运输中,雾天造成的低能见度对于行车安全带来了巨大的隐患.在雾天天气的驾驶过程中,驾驶员难免会因雾天造成的低能见度或疲劳驾驶等因素使汽车偏离正常的行驶车道进而酿成车祸.因此,设计一种在车辆出现无意识的车道偏离时能给予驾驶员及时提醒的系统,可以有效地少车道偏离事故的发生[1].在这种系统中,车道标志线的准确识别是非常关键的一步.到目前为止,虽然已经有很多基于视觉的车道线检测算法[2-4],但是仅仅使用这些算法往往只能在白天和阴天的工况下具有较高的检测和识别的成功率,针对雾天这一特殊天气情况下的图像识别效果却不佳.
雾天工况下,由于大气中存在随机介质,光从路面反射到达相机的过程中会发生吸收和散射等变化.在该过程中,原本应当沿直线传播的光发生了散射从而偏离了原来的传播路径,然而一些其他光路的光却由于散射作用进入到该光路,从而导致图像对比度下降,使车道标志线难以辨识[5].针对图像去雾,到目前为止去雾效果最好的是何恺明博士提出的暗通道先验算法,该算法能够对单幅图片有效去雾,但是经典的暗通道先验算法在雾天车道线识别过程中依然存在以下2个问题:(1)暗通道先验算法所得图像偏暗不利于使用常规算法进行车道线识别,必须对良好光照条件下的车道线识别算法进行修改,降低普通车道线识别算法的鲁棒性;(2)基于软抠图算法[6]以及指导性滤波算法[7]计算速度偏慢,不能满足实际工况的使用要求.利用双边滤波器取代软抠图算法或指导性滤波算法[8],虽然大幅提高了计算速度,但是去雾之后的图像依然偏暗,即使用良好光照条件下的车道线识别算法仍旧不能准确识别出车道线.为了解决上述问题,本文提出一种基于双边滤波器的暗通道累加算法,该方法能够有效地提高利用常规方式识别车道线的准确率并且大幅提升计算速度,对于提高用于良好光照条件下车道线识别算法的鲁棒性具有较大意义.
1 暗通道累加算法
何恺明通过对大量户外自然图像的统计实验提出了暗通道先验模型(Dark Channel Prior),通过暗通道假设直接恢复出无雾图像.
1.1 暗通道优先原理
在计算机视觉和数字图像处理中,雾天降质图像的光学模型通常描述为[9]
I(x)=J(x)t(x)+A(1-t(x)).
(1)
式中:I(x)表示观察到的有雾图像,J(x)表示景物反射光强度(清晰的无雾图像),A表示全局大气光照强度,t(x)用来描述光线通过介质透射到成像设备过程中没有被散射的部分.去雾的目标就是从I(x)中复原J(x).暗通道先验理论认为:在绝大多数非天空的局部区域里,某些像素总会(至少一个颜色通道)具有很低的值[10].用公式描述为

(2)
式中JC表示J的一个颜色通道,C∈{r,g,b}.并可以得到透射率

(3)
在现实中即便是晴朗的天气,天空中也会存在一定量的雾,如果将图像中的所有雾全部去除,则会导致图像失真,因此在(3)式中加入一个雾气保留系数ω(0<ω<1),此处取ω=0.95,有

(4)


(5)
其中t0参数用来限定透射率t的下限值,其作用是在输入图像的浓雾区域保留一定的雾[11].
1.2 本文算法
采用双边滤波器能够大幅提高图像去雾速度[8],但是由于仅仅采用双边滤波器替代软抠图算法或者指导性滤波器,其结果依然不能够为后续的车道线识别提供理想的输入图像.因此本文在采用双边滤波器的基础上对输出图像进行线性修正,从而获取理想的车道线输入图像.具体步骤如下:
(1) 求取含雾图像的暗原色图

(6)
(2) 对Idark(x,y)边界处暗原色进行修正

(7)
(3) 利用(4)式求得透射率

(8)
(5) 得到无雾图像

(9)
(6) 对去雾之后的图像J(x)进行线性修正,从而最终获取理想的车道线识别输入图像
Jideal(x)=kJk(x)+M(k∈N+),
(10)
式中Jk(x)表示单个利用双边滤波器算法去雾之后的图像,k为亮度修正系数,M则为图像亮度修正矩阵,用于对感兴趣区进行亮度补偿.
为了在后续车道线识别中进行对比验证,本文分别利用软抠图算法和双边滤波器对雾天图像进行细化,并将得到的无雾图像进行累加(见图1),描述本文在叙述过程中基于软抠图算法的暗通道优先为软抠图累加算法,如图1(c)所示.

(a)原图

(b)传统暗通道优先算法

(c)软抠图累加算法

(d)本文算法
2 去雾图像的二次处理
由于在已经得到的去雾图像中还存在一定的噪声,不利于后续的车道线识别,因此还需对去雾图像进行处理.
Sobel算子是一种将方向差分运算与局部平均相结合的方法,具有一定的噪声抑制能力并且能够有效去除道路图像中大部分的无用信息,可以较好地保留车道标志线的边缘信息[13].因此采用Sobel算子凸显左、右车道线的边缘.对于左、右两侧车道线分别采用Sobel算子进行边缘增强:
其中SL为左侧Sobel算子,SR为右侧Sobel算子.经过Sobel算子对边缘的增强,图像依然包括许多噪声,为了从多值的数字图像中直接提取出车道标志线,本文利用大津法(OSTU)获取图像阈值并进行全局二值化.
3 车道线检测
由于在结构化道路的设计和修建过程中执行一系列严格的行业标准,其车道标志线在延伸方向上有平滑曲线,并且曲率很小,一般近视野内车道线可以近似看做直线[14],并且由于Hough变换能将原始图像中给定的曲线或直线变换成参数空间的一个点,可以把原始图像中曲线或直线的检测问题转换成寻找参数空间中峰点的问题,因此变换不易受到噪声和曲线间断的影响,能较好地实现车道标志线的识别[15].本文以直线作为车道线模型,采用Hough变换检测车道线.
为了说明改进算法的有效性,本文将雾天原图、经典暗通道算法去雾、软抠图累加算法和本文算法4种图像分别进行车道线识别并加以对比(见图2).

(a)原图

(b)传统暗通道优先算法

(c)软抠图累加算法
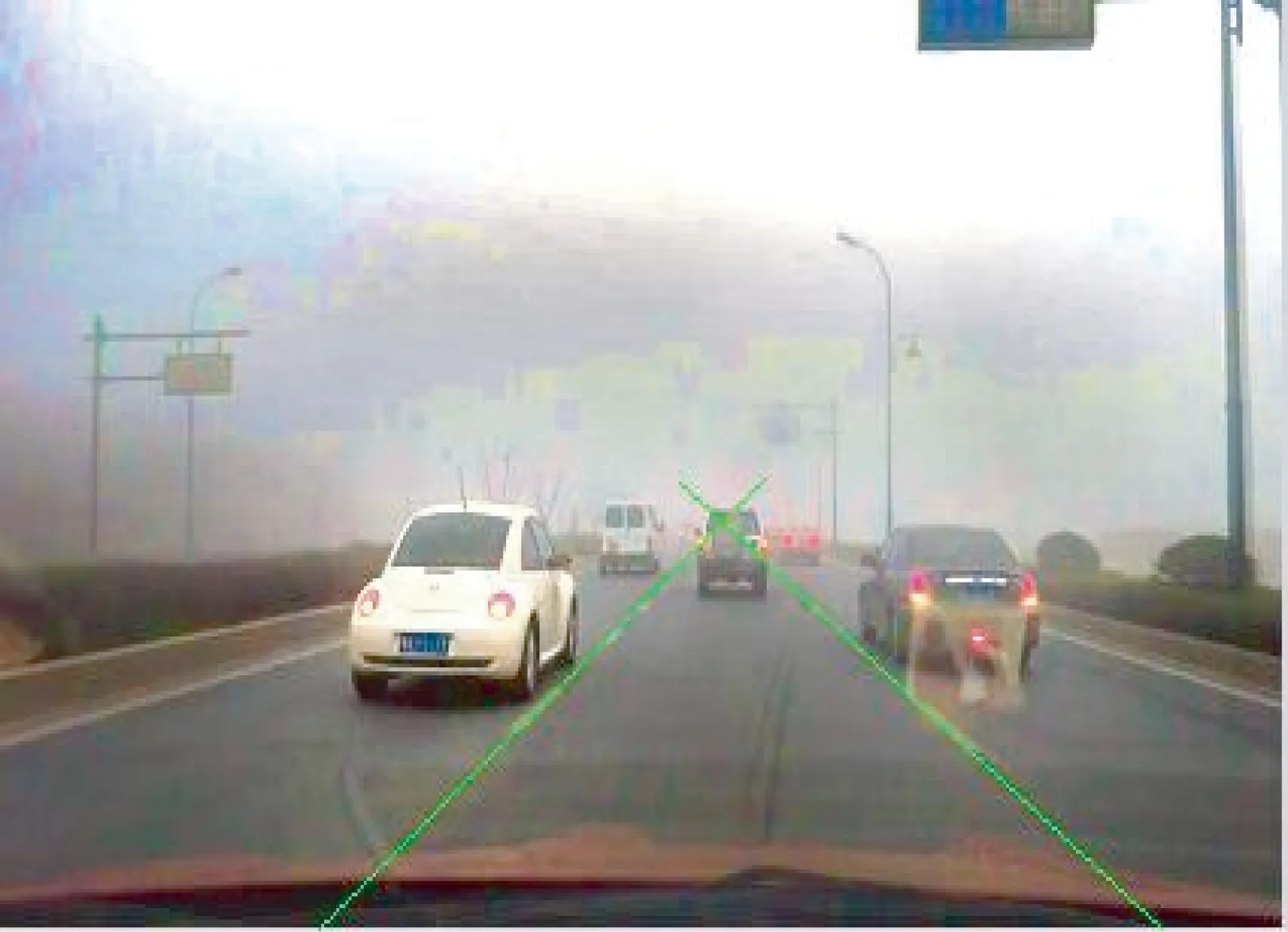
(d)本文算法
由以上各实验结果看出,直接使用经典暗通道优先算法(见图2(b))和雾天原图(见图2(a))的车道线基本无法准确识别,而经过软抠图累加算法和本文的算法的图像(见图2(c)和图2(d))通过Hough变换能够准确地对车道线进行识别.类似的实验证明指导性滤波叠加算法的去雾效果同样能够达到准确识别车道线的要求,此处不再赘述.
4 雾天车道偏离判断
4.1 预警算法建立
俄罗斯专家指出,伦理是研究道德的哲学分支,人工智能的伦理包括道德、隐私、正义、有益性、安全、责任等,人工智能遵循伦理道德其实也就是制定“机器人规则”。人工智能不是一个简单被动的工具,而是像人一样具有感知、认知、决策等能力的事物,需要确保这样的复杂工具进入人类社会以后和人类的价值规范及需求相一致。哲学博士安德烈·西尼察强调,人工智能技术首要保障对人安全,就像克隆技术一样,不能危害人类和伤害人的尊严。在立法时也不得不考虑古典哲学家康德提出的“我能够知道什么?我该怎么做?我可以希望什么?什么是人?”等永恒的世界观问题,归根结底最重要的对象是人,人工智能立法要以人为中心。
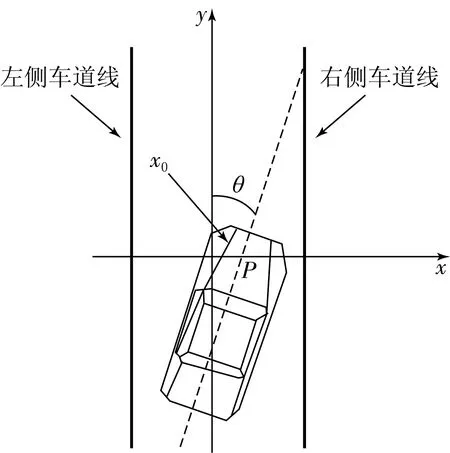
图3 车辆偏离示意图
车辆偏离预警多用于因驾驶员注意力分散或下降导致的车辆偏离,当驾驶员未打开转向灯而有所偏离时系统认定需要预警并且保存变道图像[16].本文主要是依据车辆在当前道路中的横向位置和方向参数来判断车辆是否偏离车道行驶(见图3).
图3中车辆在车道中的横向位置参数x0是指车辆前轮轮轴中心点P的x坐标值,P点在y轴右侧时,x0为正,反之为负.车辆在车道中的方向参数是指y轴与车辆纵向中轴线的方向夹角为θ,当车头右偏时θ为正值,反之为负值.根据车辆在当前车道中的位置参数和方向参数,可以得到偏离车道预警模型[17]:
(11)
(12)
式中θ0为设定好的阀值,本文为1°,b为车辆宽度,xt为设定的报警临界线距y轴的距离.当满足(11)式时,车辆偏离车道行驶,偏离方向向右偏;当满足(12)式时,车辆偏离方向向左偏.
4.2 预警算法检测平台建立
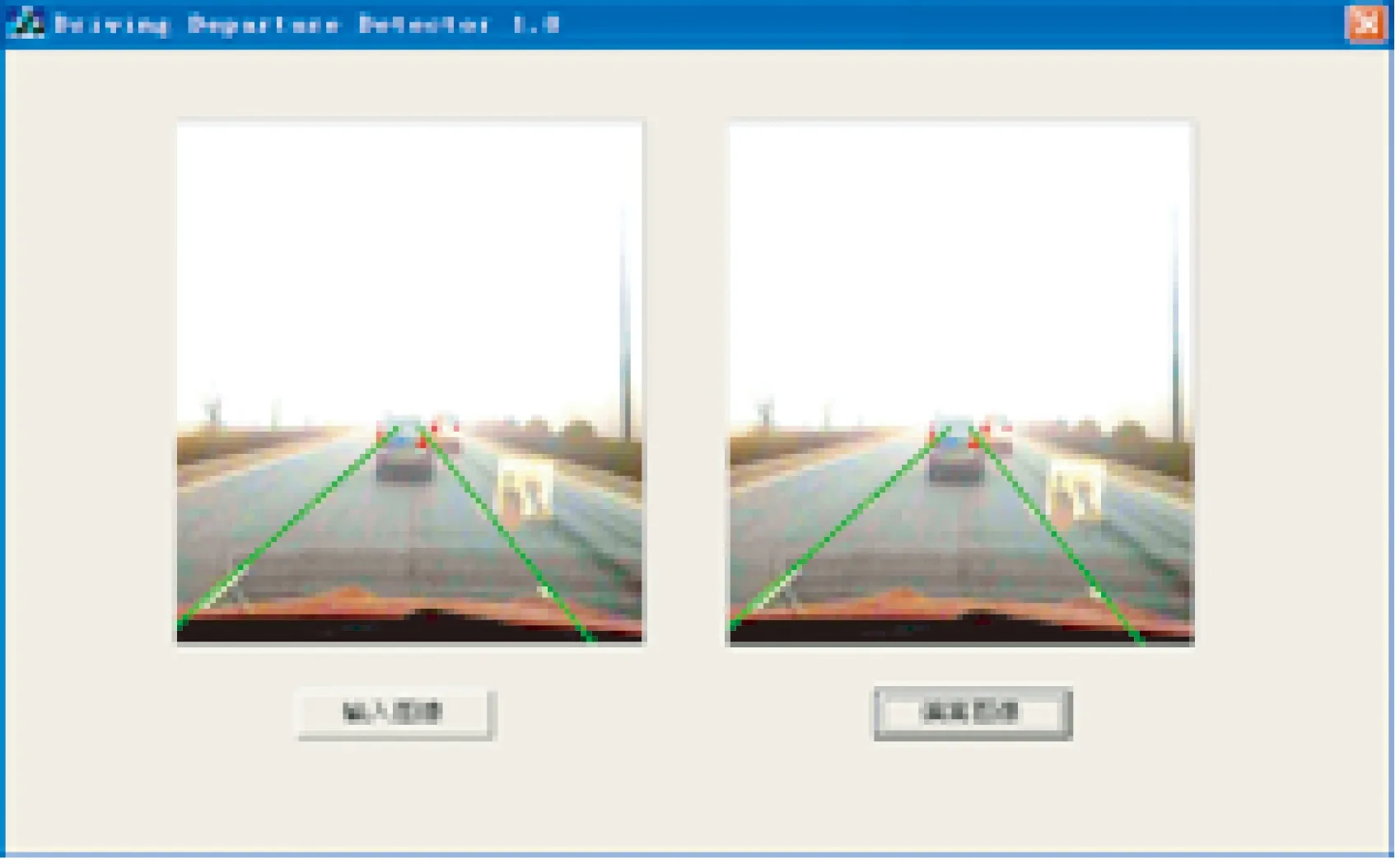
图4 Driving Departure Detector 1.0系统
为了说明去雾算法在车道偏离预警系统中的有效性,利用VC++6.0和Opencv 1.0创建了Driving Departure Detector 1.0系统,该系统能识别车辆变道行驶画面并将变道行驶图像进行保存,可以为后续事故的鉴定以及事故责任划分提供有效依据.首先将雾天图像进行去雾处理,得到无雾图像作为该系统的输入图像并进行车道线识别,然后依据上述的预警算法进行判断,若存在变道则在右侧识别框内显示并保存,否则进行下一张图像的识别.Driving Departure Detector 1.0系统如图4所示.
4.3 去雾图像预警检测效果实验
为了说明本文所提出去雾算法的有效性,分别从4段雾天行车视频中各选取了25张变道行驶画面以及25张直线正常行驶的图像,用于计算误检率和漏检率.利用3种去雾算法进行去雾处理,并将去雾图像依次输入Driving Departure Detector 1.0系统中,然后对各种去雾算法下保存的图像进行统计,分别得到漏检率以及误检率,如图5和6所示.从图5和6中可以看出,软抠图累加算法、指导性滤波累加算法以及本文算法相比经典暗通道优先算法都有着较低的误检率和漏检率.
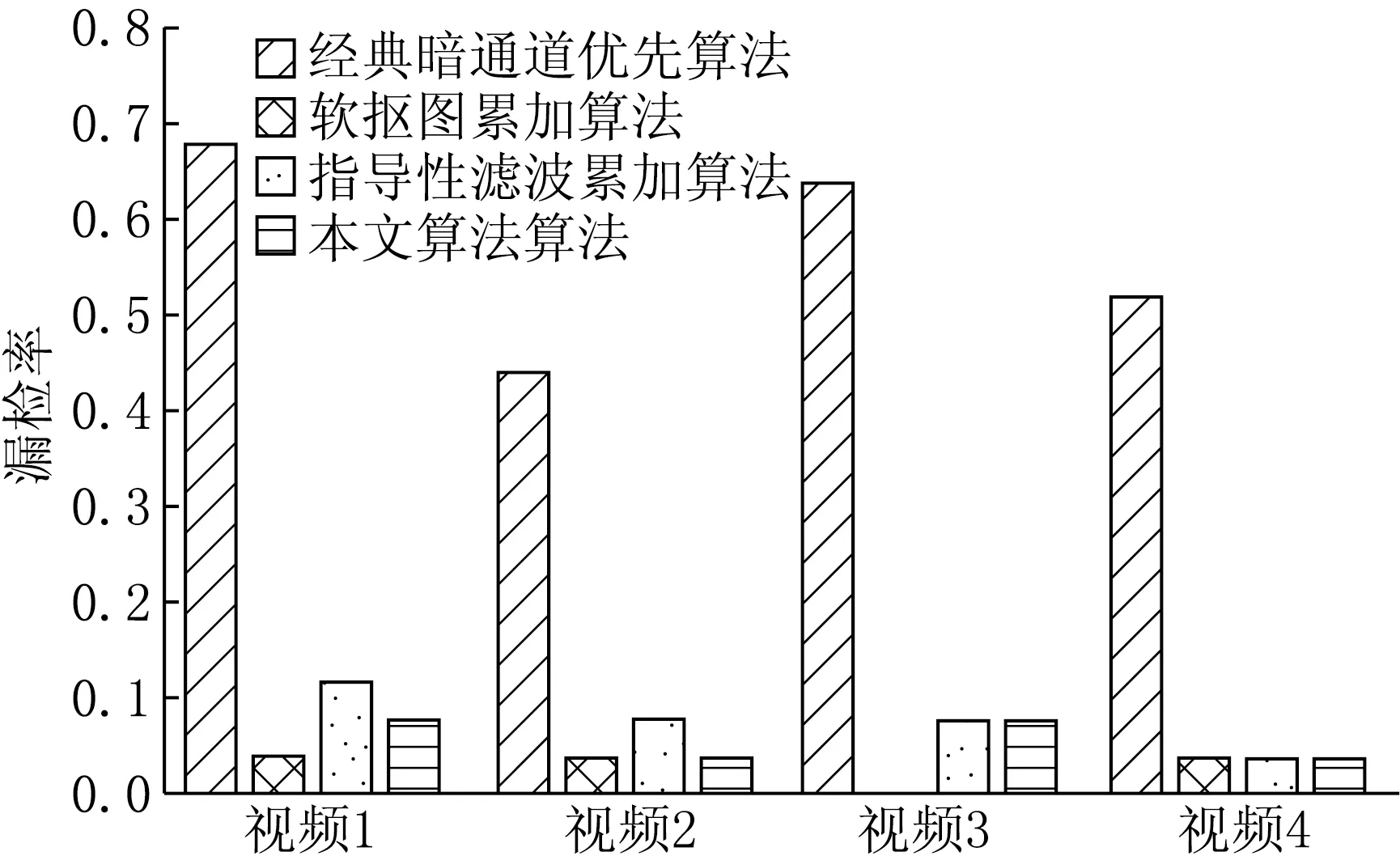
图5 各种去雾算法漏检率对比图
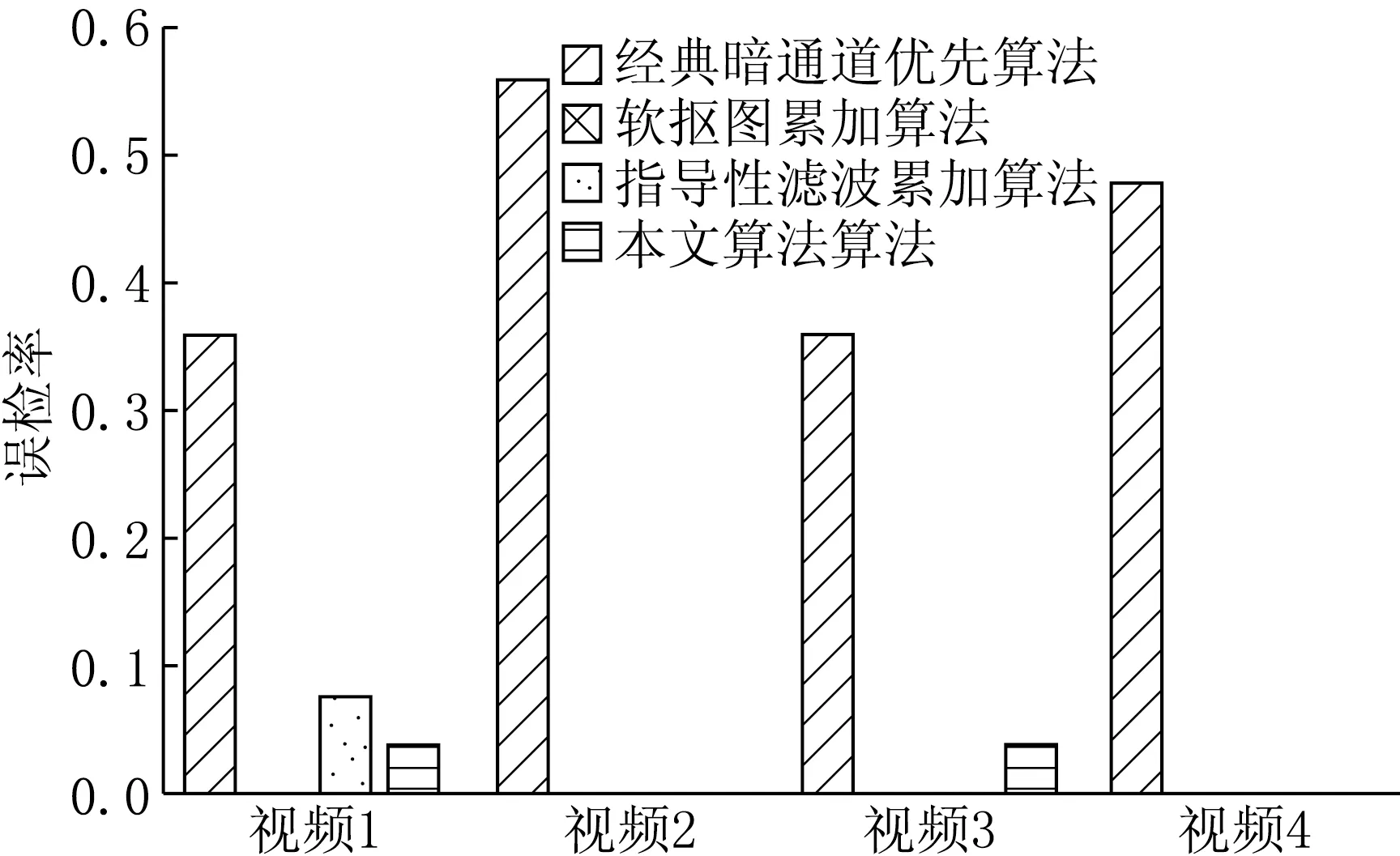
图6 各种去雾算法误检率对比图
5 改进算法实时性分析
虽然软抠图累加算法、指导性滤波叠加算法和本文算法都能达到使用常规方式检测出车道线的要求,但是对于高速行驶的车辆而言,仅仅能够检测出车道线是远远不够的,最重要的是能够在规定时间内做出识别,即拥有良好的实时性.本文对软抠图累加算法、指导性滤波叠加算法和本文算法的实时性进行了分析.
本文对图片去雾所采用的实验平台为处理器为Pentium Dual-Core 1.86 GHz、内存为4 GB运行Windows XP的PC机,编程语言为Matlab R2009a.依次对图片大小为256像素×192像素、320像素×240像素、512像素×384像素、640像素×480像素、1 024像素×768像素的图片进行去雾,其运行时间如表1所示.

表1 车道线检测时间对比 s
由表1可以看出,虽然软抠图累加算法、指导性滤波叠加算法均能够准确识别出车道线,但是其实时性明显比本文算法差.
6 小结
实验证明本文所给出的基于双边滤波器的暗通道累加算法能够有效地提高利用常规方式识别车道线的准确率并且大幅提升计算速度,对于提高普通用于良好光照条件下车道线识别算法的鲁棒性具有较大意义.
然而,本文算法依然存在部分场景误检率较高的问题,这主要是由于改进后的图像增强技术在部分图像对比度提升上依然表现不佳,以及全幅去雾造成的非兴趣区域图像检测干扰.在今后的研究中将考虑利用车道平面约束方程获取图像增强兴趣区域,以提高算法的实时性与准确性,进一步增强算法的对比度提升能力,使其具有更高的鲁棒性.
[1] 徐兰梅.车道偏离预警系统是否可以有效减少安全事故发生[EB/OL].[2015-03-29].http://gps.carcav.com/qcdz/2015/0329/417-98.html.
[2] KIM Z W.Robust lane detection and tracking in challenging scenarios[J].IEEE Transactions on Intelligent Transportation Systems,2008,9(1):16-26.
[3] 刘伟,黎宁,张丹,等.基于自适应分割阈值的夜间车道标志线识别[J].计算机与数字工程,2015,43(2):308-311.
[4] 陈军.基于DSP的高速公路车道偏离报警系统研究[D].天津:天津大学,2010.
[5] 祝培,朱虹,钱学明,等.一种有雾天气图像景物影像的清晰化方法[J].中国图像图形学报,2004,9(1):124-128.
[6] LEVIN A,LISCHINSKI D,WEISS Y.A closed form solution to natural image matting[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2008,30(2):228-42.
[7] HE K,SUN J,TANG X.Guided image filtering.[J].IEEE Transactions on Software Engineering,2013,35(6):1397-1409.
[8] 吴笑天,丁兴号,吴奎.基于暗通道理论的雾天图像复原的快速算法[J].长春理工大学学报(自然科学版),2012,35(1):100-104.
[9] COX L J.Optics of the atmosphere-scattering by molecules and particles[J].Journal of Modern Optics,1977,14(7):698-699.
[10] 方雯,刘秉瀚.多尺度暗通道先验去雾算法[J].中国体视学与图像分析,2013(3):230-237.
[11] HE K,SOU J,TANG X.Single image haze removal using dark channel prior.[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2010,33(12):2341-2353.
[12] 胡平.基于图像分割的交通图像快速去雾算法[J].计算机系统应用,2014,23(9):134-138.
[13] 陆宗骐,梁诚.用Sobel算子细化边缘[J].中国图像图形学报,2000,5(6):516-520.
[14] 金辉,吴乐林,陈慧岩,等.结构化道路车道线识别的一种改进算法[J].北京理工大学学报,2007,27(6):501-505.
[15] 鞠乾翱.基于机器视觉的快速车道线辨识研究[D].上海:上海交通大学,2013.
[16] 林广宇,魏朗,蹇小平.基于嵌入式的车辆偏离预警系统研究[J].电子设计工程,2010,18(8):26-28.
[17] 魏朗,刘永涛.一种客运车辆车道偏离预警装置及其判断方法:中国,ZL201210057758.X[P].2014-06-18.
(责任编辑:石绍庆)
Research of vehicle departure alarm in fog weather based on improved dark channel prior algorithm
ZHOU Jin-cao1,WEI Lang1,ZHANG Zai-ji2
(1.College of Automobile,Chang’an University,Xi’an 710064,China; 2.Tianjin Key Lab For Advanced Signal Processing,Civil Aviation University of China,Tianjin 300300,China)
In this paper,a new algorithm based on dark channel prior was proposed for lane detection in fog weather which couldn’t be detected by traditional algorithm.Firstly,the lane images in fog weather was defogged by improved dark channel prior based on gauss bilateral filter and then luminosity of defogged pictures were adjusted.Secondly,binary images of road edges was obtained by Sobel operator and Ostu algorithm.Finally,the road lane was extracted by Hough transform.Experimental results showed this new algorithm could detect road lane in fog weather accurately and rapidly.Compared with traditional lane detection method,this new algorithm has higher accuracy and instantaneity thus has great influence on the improvement of automobile active safety in fog weather.
automobile active safety;fog weather;bilateral filter;vehicle departure alarm;image defog
1000-1832(2017)01-0062-06
10.16163/j.cnki.22-1123/n.2017.01.012
2015-09-30
国家自然科学基金资助项目(51278062).
周劲草(1989—),男,博士研究生,主要从事车辆主动安全性研究;魏朗(1957—),男,博士,教授,博士研究生导师,主要从事汽车主动安全性、道路事故多发点与治理方法、道路交通事故分析与再现技术研究.
TP 391 [学科代码] 520·30
A
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
阅读(科学探秘)(2021年10期)2021-03-08 10:16:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
火控雷达技术(2016年2期)2016-02-06 02:29:00
交通科学与工程(2015年1期)2015-12-23 11:08:15
