
基于GNSS接收机导航定位数据的定位产品检测理论研究
2017-03-23 08:29王细钦戴炜航
导航定位与授时 2017年1期
王细钦,戴炜航,骆 建
( 广东省通讯终端产品质量监督检验中心,广东 河源 517001)
基于GNSS接收机导航定位数据的定位产品检测理论研究
王细钦,戴炜航,骆 建
( 广东省通讯终端产品质量监督检验中心,广东 河源 517001)
随着GNSS全球导航卫星系统的发展,特别是随着北斗卫星导航系统的正式运行及完善,导航定位产品由支持单模GPS向支持双模或多模发展,但是导航定位数据格式并未统一,主要是根据NMEA-0183为主修改。针对相关标准及产品数据进行理论性研究并给出相应测试的依据。
GNSS;北斗卫星导航系统;GPS;NMEA-0183
0 引言
全球导航卫星系统(Global Navigation Satellite System,GNSS)泛指所有的卫星导航系统,包括全球及区域性范围内的导航卫星系统,例如美国全球定位系统(Global Positioning System,GPS)、俄罗斯GLONASS、欧洲Galileo、中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)、日本QZSS、印度IRNSS;卫星增强系统,例如美国WAAS(广域增强系统)、欧洲EGNOS(欧洲静地导航重叠系统)和日本MSAS(多功能运输卫星增强系统),还包含未来新建的其他卫星导航系统。
目前世界上有多个导航系统,但导航定位产品定位数据并未统一。北斗系统未启用服务之前,市面上多数导航定位产品是基于GPS的单模定位系统,导航定位数据输出格式为NMEA-0183。自中国北斗卫星导航系统正式运行以来,越来越多的产品支持双模或者多模系统,但是导航定位数据输出格式并未统一,厂商根据NMEA-0183自定义数据输出格式,所以很多产品输出的导航定位数据相似但有差别。导航定位数据是测试导航定位产品的定位、测速精度这些关键指标的重要依据,本文对相关标准及产品数据进行研究并推出相应的测试方法。
1 北斗及GPS系统
1.1 北斗卫星导航系统
BDS是中国自行研制的全球卫星导航系统。北斗卫星导航系统由空间段、地面段和用户端三部分组成,可以在全球范围内全天候为各类用户提供高精度、高可靠定位、导航、授时服务,目前已具备区域导航、定位和授时的能力,定位精度10m,测速精度0.2m/s,授时精度20ns。
1.2 GPS全球定位系统
美国GPS自19世纪70年代在子午卫星系统基础上开始研制,并于1995年12月28日起开始提供完整服务。GPS空间段由位于6个轨道面的24颗卫星构成,卫星轨道面与地球赤道面之间的夹角为55°。GPS控制段由1个主控站、4个注入站和6个监测站组成。用户端为各种GPS接收机。
2 导航定位数据输出格式
现阶段,国际上通用的数据格式标准都是由各应用协会自行制定的,目前主要的导航定位数据标准有由美国海洋电子协会发布的接收机和其他航海电子产品的导航数据输出格式NMEA-0183,目前最新的版本为2012年发布的NMEA-0183 Version4.10,其升级了不同导航及通信设备协议“语句”,并更新了对Galileo系统的兼容,其中并未涉及中国北斗系统的信息。中国卫星导航系统管理办公室批准并于2015年11月1日实施BD 410004-2015《北斗/全球卫星导航(GNSS)接收机导航定位数据输出格式》,其参考NMEA-0183标准。两种标准的格式数据都采用ASCII文本符来表示,由起始定界符“$”或“!”、终止符
3 导航定位数据采集系统
本次用于采集不同定位产品导航定位数据的测试系统框图如图1所示,系统可通过转发实际的卫星信号进行测试,也可由卫星信号模拟源发出模拟卫星信号,接收机接收卫星信号并将导航定位数据反馈回控制计算机。

图1 系统框图Fig.1 System block diagram
4 定位产品输出导航定位数据与导航定位数据输出标准比较
目前常用的导航定位数据输出格式有NMEA-0183,NMEA-0183是美国国家海洋电子协会(National Marine Electronics Association,NMEA)定义的标准协议;而中国结合BDS也发布了中国第二代卫星导航系统重大专项标准BD 410004-2015《北斗/全球卫星导航系统(GNSS)接收机导航定位数据输出格式》(下称北斗导航定位数据格式),其是由中国卫星导航系统管理办公室发布的标准,后者是依托前者并根据中国实际运用而修订。北斗导航定位数据格式与NMEA-0183相比,增加部分字段对北斗导航系统进行兼容,选取了NMEA-0183中北斗导航系统需要用到的语句。在实际导航定位产品中,常用的语句为GGA、RMC、GSA、GSV、VTG、GLL、ZDA和TXT等8条,因此主要以这8条来比较。
4.1 常用定位数据输出标准比较
经比较,北斗导航定位数据格式与NMEA-0183的GGA、VTG、GLL、ZDA、TXT相同,而北斗导航定位数据格式与NMEA-0183的RMC相比多了1个导航状态字段,北斗导航定位数据格式与NMEA 0183的GSA、GSV相比多了GNSS系统标示符字段。本文对市面上较常使用的汽车行驶记录仪、GNSS接收机、GNSS定位模块等数据进行分析比较,分别为GNSS接收机A、汽车行驶记录仪B、汽车行驶记录仪C、汽车行驶记录仪D及GNSS定位模块板E号测试机。
4.2 不同定位产品输出定位数据比较
4.2.1 GGA定位数据语句
如表1所示,比较产品中,混合定位常使用GGA语句,GGA为定位信息。其中A、B、C输出定位数据与标准NMEA-0183及北斗导航定位数据格式相同,汽车行驶记录仪D、GNSS定位模块板E则多了1个VDOP字段,VDOP为垂直精度因子,即表1中标出下划线的字段。2份标准都规定混合定位用GNS语句,单模定位时使用GGA语句,但在比较产品中GNS语句并没有实际使用,而依旧采用GGA语句。

表1 GGA定位数据语句
4.2.2 RMC定位数据语句
如表2所示,RMC为最小推荐定位信息,由比较产品的RMC语句可以得出,除测地型接收机A不参与比较和汽车行驶记录仪C少了模式指示字段以外,其余被测产品与NMEA-0183大致相同。表2中下划线字段为模式指示,其中模式指示字段中A表示自主定位、D表示差分定位、E表示估算定位、N表示数据无效等。

表2 RMC定位数据语句
4.2.3 GSA定位数据语句
如表3所示,GSA定位数据语句是表征GNSS精度因子(DOP)和有效卫星的语句,比较产品中的GSA语句。其中除去汽车行驶记录仪B不输出该语句外,汽车行驶记录仪D、GNSS定位模块板E与测地型接收机A、汽车行驶记录仪C相比较,除了正常的位置精度因子、水平精度因子和垂直精度因子以外还多了TDOP字段,即钟差精度因子,如表3中下划线字段所示,其他字段与NMEA-0183相同。
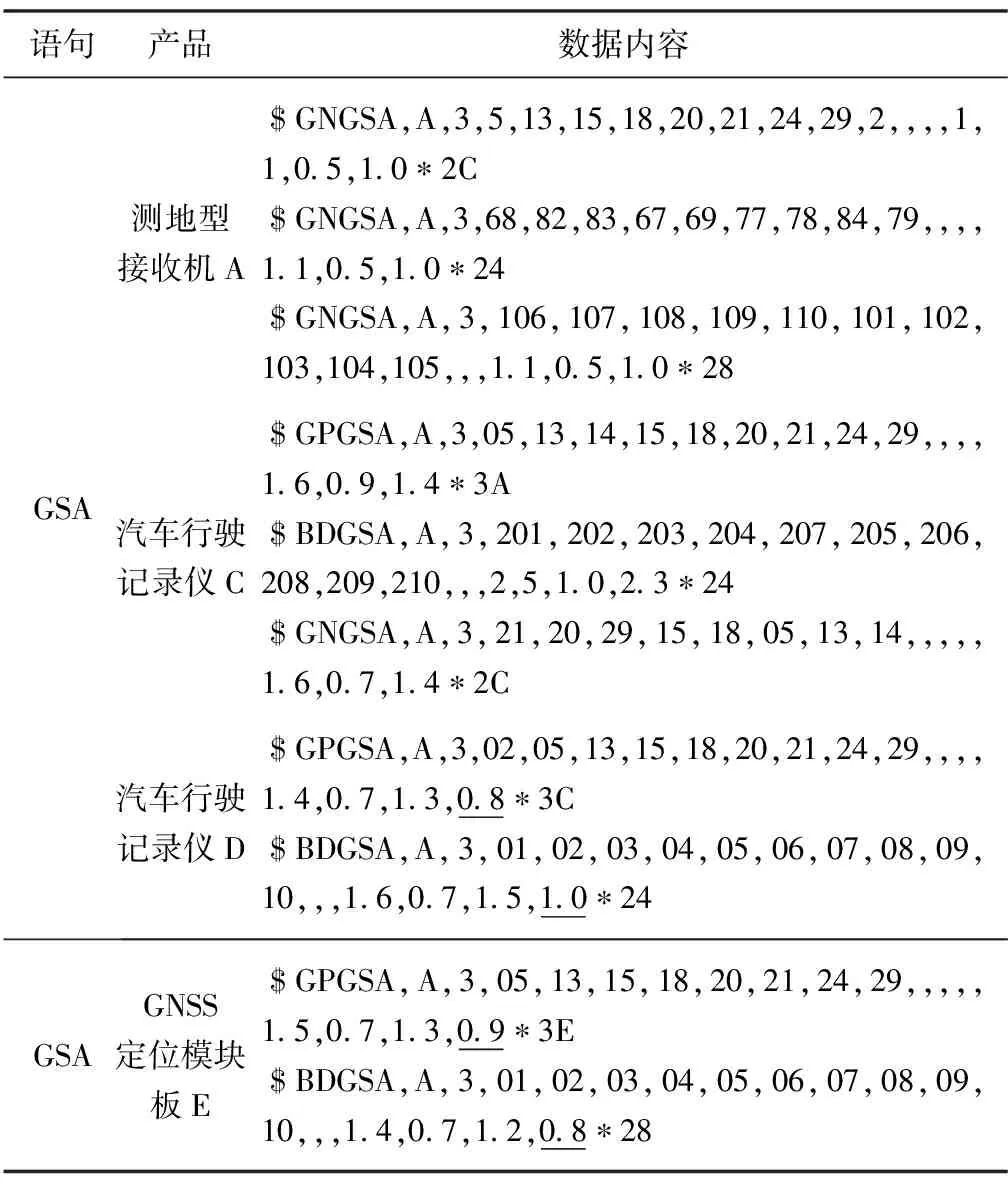
表3 GSA定位数据语句
4.2.4 GSV定位数据语句
GSV语句包含了可视卫星数、卫星标志号、仰角、方位角、载噪比等信息。如表4所示,比较产品中的GSV与NMEA-0183相同,GSV为可见卫星信息,但是不同产品北斗导航系统的卫星标识号输出不同。测地型接收机A用1XX表示北斗卫星,汽车行驶记录仪C用2XX表示北斗卫星,汽车行驶记录仪D和GNSS定位模块板E则用XX来表示北斗卫星。
表4 GSV定位数据语句
Tab.4 GSV location data statement
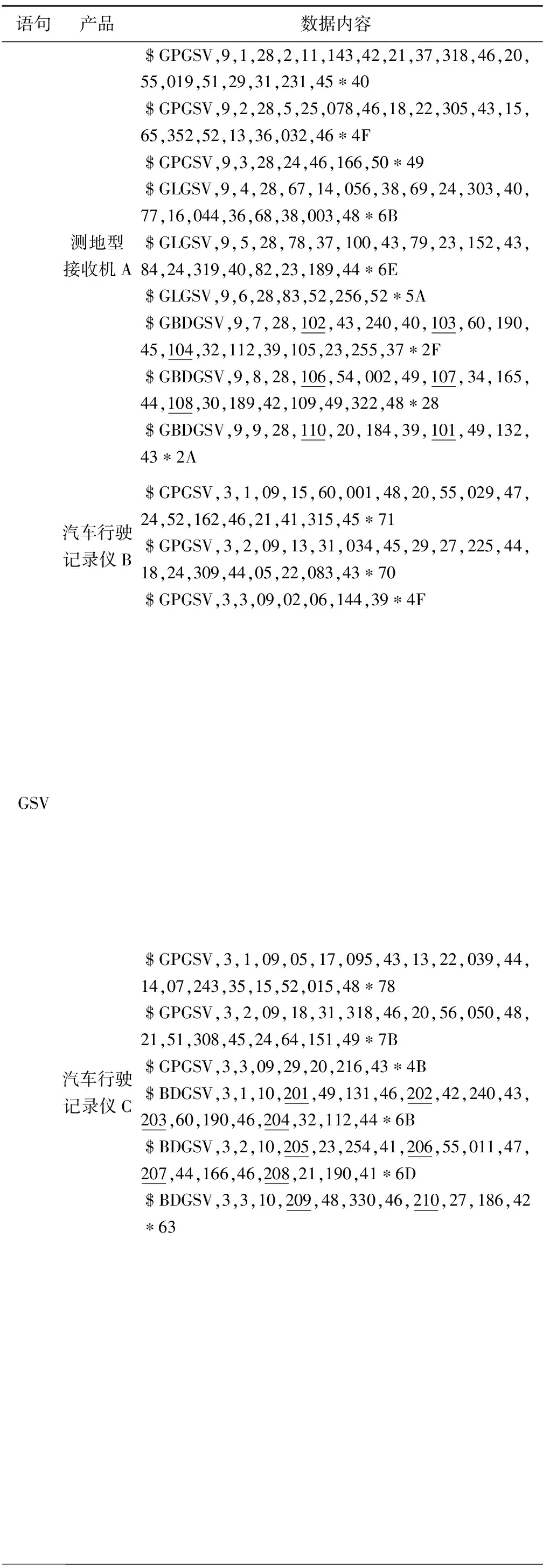
语句产品数据内容GSV测地型接收机A$GPGSV,9,1,28,2,11,143,42,21,37,318,46,20,55,019,51,29,31,231,45∗40$GPGSV,9,2,28,5,25,078,46,18,22,305,43,15,65,352,52,13,36,032,46∗4F$GPGSV,9,3,28,24,46,166,50∗49$GLGSV,9,4,28,67,14,056,38,69,24,303,40,77,16,044,36,68,38,003,48∗6B$GLGSV,9,5,28,78,37,100,43,79,23,152,43,84,24,319,40,82,23,189,44∗6E$GLGSV,9,6,28,83,52,256,52∗5A$GBDGSV,9,7,28,102,43,240,40,103,60,190,45,104,32,112,39,105,23,255,37∗2F$GBDGSV,9,8,28,106,54,002,49,107,34,165,44,108,30,189,42,109,49,322,48∗28$GBDGSV,9,9,28,110,20,184,39,101,49,132,43∗2A汽车行驶记录仪B$GPGSV,3,1,09,15,60,001,48,20,55,029,47,24,52,162,46,21,41,315,45∗71$GPGSV,3,2,09,13,31,034,45,29,27,225,44,18,24,309,44,05,22,083,43∗70$GPGSV,3,3,09,02,06,144,39∗4F汽车行驶记录仪C$GPGSV,3,1,09,05,17,095,43,13,22,039,44,14,07,243,35,15,52,015,48∗78$GPGSV,3,2,09,18,31,318,46,20,56,050,48,21,51,308,45,24,64,151,49∗7B$GPGSV,3,3,09,29,20,216,43∗4B$BDGSV,3,1,10,201,49,131,46,202,42,240,43,203,60,190,46,204,32,112,44∗6B$BDGSV,3,2,10,205,23,254,41,206,55,011,47,207,44,166,46,208,21,190,41∗6D$BDGSV,3,3,10,209,48,330,46,210,27,186,42∗63

续表语句产品数据内容GSV汽车行驶记录仪D$GPGSV,3,1,11,02,06,144,41,03,66,195,20,05,22,083,44,10,35,322,47∗7E$GPGSV,3,2,11,13,31,034,45,15,60,001,48,18,24,309,44,20,55,029,46∗7F$GPGSV,3,3,11,21,41,315,45,24,52,162,46,29,27,225,44∗44$BDGSV,3,1,10,01,49,131,45,02,42,239,43,03,60,189,46,04,32,112,43∗69$BDGSV,3,2,10,05,22,254,40,06,54,004,46,07,36,164,44,08,28,189,42∗6E$BDGSV,3,3,10,09,48,323,45,10,21,184,40∗64GNSS定位模块板E$GPGSV,4,1,15,04,55,055,25,05,16,096,41,08,50,018,24,10,43,335,48∗7E$GPGSV,4,2,15,12,04,154,38,13,19,040,42,14,08,244,36,15,50,018,48∗71$GPGSV,4,3,15,16,66,146,24,18,33,319,46,20,55,055,47,21,52,304,45∗7B$GPGSV,4,4,15,24,66,146,47,26,50,018,22,29,17,213,42∗48$BDGSV,3,1,10,01,49,131,45,02,42,239,43,03,60,189,45,04,32,112,44∗6D$BDGSV,3,2,10,05,22,254,40,06,54,011,46,07,45,166,45,08,20,189,40∗67$BDGSV,3,3,10,09,48,331,45,10,28,186,42∗6E
5 基于导航导航定位数据的定位精度测试方法
本文对定位精度的处理基于以下原理:直接用经纬度计算两点间距离和测量误差时,主要考虑2个参数,即经、纬度平均每一度的距离(弧长),纬度平均每一度的弧长大概是相等的,约为111000 m。而经度平均每一度的弧长是随着纬度变化而变化的。纬度越小经向的弧长越大,反之,纬度越大经向的弧长则越短。计算每一纬度所在经向一度的弧长,如下:
其中,B为计算点所在的纬度(取到度),R为赤道半径,r为极轴半径,取R=6378137m,r=6356752m。
5.1 动态定位精度测试
如图2所示,测地型接收机A和被测样品行车记录仪B放在标准速度车上绕CORS站运行。测地型接收机A通过无线通信网接收CORS站的差分数据进行差分定位以获得标准导航定位数据。标准接收机和被测样品的输入到检测计算机的数据处理软件,经过对导航定位数据的研究可知,导航定位产品在GGA和RMC语句上的经纬度定位位置的字段是相同的,数据处理软件通过比较同一时刻的经纬度定位位置的数据以检测其动态定位精度,软件处理如图3所示。

图2 测试系统框图Fig.2 Test system block diagram
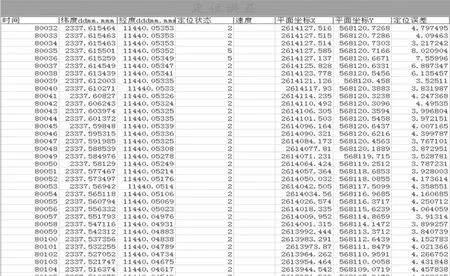
图3 动态定位精度处理结果Fig.3 Dynamic positioning precision processing results
5.2 静态定位精度测试
静态定位精度比动态定位精度简单,只需要将被测接收机放置到已知位置的标准点上采集导航定位数据,然后将输出数据的定位位置字段与标准点的位置进行比较即可获得静态定位精度。图4所示为静态定位精度处理结果。
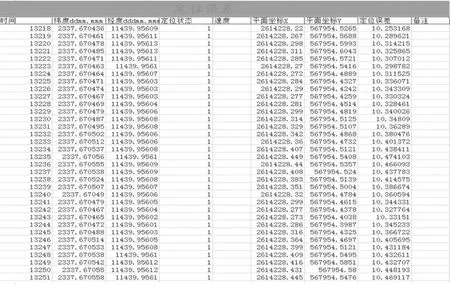
图4 静态定位精度处理结果Fig.4 Static positioning precision processing results
6 结论
通过对目前市场上单模、双模及多模导航定位终端的定位数据的分析及总结,表明现有的民用市场上该类终端的定位数据语句多种多样,未形成统一标准,因此对该类终端的互联、数据交互和质量检测造成一定的困难,并且该差异还将存在一段时间。针对以上问题,本文以NMEA定义的标准协议NMEA-0183和由中国卫星导航系统管理办公室发布的标准BD 410004-2015《北斗/全球卫星导航系统(GNSS)接收机导航定位数据输出格式》为参照,对市场上常用导航定位终端的定位数据输出语句进行了系统性的比较,通过比较得到的结论是大部分终端的定位数据语句的主体是一致的,仅仅在一小部分字段上的定义存在差异,例如对北斗卫星的标识号不同、拥有授时功能的终端比无授时终端多了钟差精度因子语句等局部差异,根据统计以上差异化覆盖大部分民用终端,因此本文提出的根据输出语句的初步判断后,再通过调整自动化测试工具的对比字段符,从而达到快速精准的测试,该方法也通过与其他实验室的比对试验验证是可行有效的。
[1] 谢钢. GPS原理与接收机设计[M].北京:电子工业出版社, 2012.
[2] 清华大学. BD 410004-2015 北斗_全球卫星导航系统(GNSS)接收机导航定位数据输出格式[X].北京:中国卫星导航系统管理办公室, 2015.
[3] 丛佃伟, 许其凤. GNSS动态定位性能评价研究现状与进展[J]. 导航定位学报, 2016,4(2):1-5.
[4] 张超, 范娟利, 章传银, 等.不同格式ASCII数据流解析方法研究[J]. 全球定位系统, 2014,39(1):56-60.
[5] 王尔申, 李锐, 唐阳. GNSS性能测试方法研究与分析[J]. 导航定位学报, 2016,4(2):21-25.
[6] 胡洪. GNSS精密单点定位算法研究与实现[D]. 北京:中国矿业大学,2014.
[7] National Marine Electronics Association. NMEA 0183 Standard for interfacing marine electronic devices [X].American:National Marine Electronics Association, 2002.
[8] 胡立志, 董莲, 陆福敏, 等.基于GPS模拟器的接收机测试方法研究[J]. 电子测量技术, 2009, 32(6): 127-130.
[9] NMEA 0183 Standard For Interfacing Marine Electronic Devices V3.01.
[10] 肖远亮. NMEA-0183数据标准在GPS技术中的应用[J]. 物探装备, 2003, 13(2):127-133.
[11] 刘大杰, 施一民.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社, 1996.
Research on the Theory of Positioning Products Detection Based on GNSS Receiver Navigation and Positioning Data
WANG Xi-qin, DAI Wei-hang, LUO Jian
(Guangdong Telecommunications Terminal Products Quality Supervision and Testing Center,Heyuan, Guangdong 517001,China)
With the development of GNSS global navigation satellite system, especially with the operation and improvement of the BeiDou Navigation Satellite System, the mode the navigation and positioning products support goes from single-mode GPS to dual mode or multimode while the navigation and positioning data formats, whose major modification is based on NMEA-0183, are not unified. Research on the theory of the relevant standards and product data is performed, and the corresponding test methods are introduced.
GNSS;BeiDou Navigation Satellite System;GPS;NMEA-0183
10.19306/j.cnki.2095-8110.2017.01.012
2016-06-17;
2016-07-01。
王细钦(1991-),男,助理工程师,主要从事通信终端产品的测试方法研究。E-mail:wxiqin@126.com
T-60
A
2095-8110(2017)01-0067-05
猜你喜欢
仪器仪表用户(2022年3期)2022-03-04
电脑爱好者(2021年23期)2021-12-08
导航定位学报(2021年4期)2021-08-29
建材发展导向(2021年7期)2021-07-16
办公室业务(2019年13期)2019-08-01
发明与创新·小学生(2019年5期)2019-06-14
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
故事会(2017年6期)2017-03-23
