
基于模糊控制的智能滴灌控制系统设计
2017-03-21 02:02田思庆郑家风张炳权
节水灌溉 2017年6期
田思庆,曹 宇,魏 强,郑家风,张炳权
(1. 佳木斯大学信息电子技术学院,黑龙江 佳木斯 154007;2. 佳木斯大学机械工程学院,黑龙江 佳木斯 154007;3. 南京乐金化学新能源汽车电池有限公司,南京 210038 )
0 引 言
智能滴灌控制系统通过对作物生长土壤及光照环境数据进行实时检测,并将检测数据反馈给控制器,控制器将对数据进行处理,并根据实际情况对执行元件进行实时控制,实现对作物的适时、适量的精确滴灌。根据各个大棚内土壤湿度的不均衡性,以及难以建立精确的数学模型等特点。灌水器部分,即灌水系统采用模糊控制策略,同时为了保证滴灌水压的恒定,根据3条支路比例电磁阀的开度,制定出模糊控制规则,以改变变频器频率,控制水泵转速保持恒压供水。本系统经过仿真和实地运行验证,具有超调量小、动态时间短和稳健性好等特点。
1 滴灌控制系统
为满足温室大棚内作物生长的需求,而设计的温室滴灌控制系统,不但节约了能源,降低了成本,更提高了作物灌溉的自动化水平[1]。滴灌控制系统工艺流程图如图1所示。
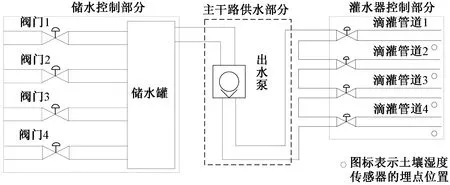
图1 智能滴灌控制工艺流程图
按照功能划分滴灌控制系统主要由3个部分组成,如图1中3个虚线框。其中第一部分为储水控制部分即水源供给部分,以保证系统具有充足的水源;第二部分为主干路供水部分,以保证系统的恒压运行供水;第三部分为灌水器控制部分,以实现灌水器管网的滴灌控制,保证土壤湿度的精确滴灌。
2 灌水器模糊控制设计
2.1 滴灌系统分析
本系统中灌水器滴灌系统本身是一个较为复杂的被控对象,用二阶纯滞后模型近似描述,如式(1)所示。式(1)中K为放大系数,τd为纯滞后时间。
(1)
灌水器滴灌系统传递函数用式(2)近似描述:
(2)
2.2 灌水器模糊控制设计
本系统采用的模糊控制器为双输入单输出的多变量二维常规模糊控制器,该控制器的两个输入变量分别为:土壤湿度值humidity和光照强度值light;输出量设定为比例电磁阀的开度u。在模糊控制器中设其输入模糊语言变量分别对应为HE,LE,输出语言变量为U[2]。二维模糊控制器简单示意图如图2所示。
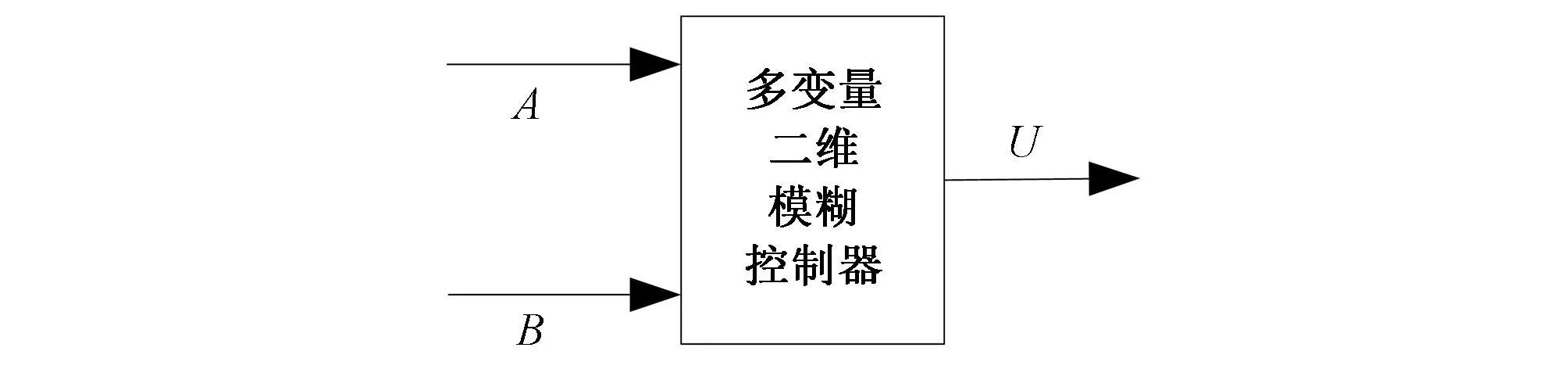
图2 二维模糊控制器结构图
将土壤湿度偏差HE分为5个模糊集:{NB(negative big),NS(negative small),ZO(zero),PS(positive small),PB(positive big)},对应的物理状态分别为{湿度采样值远低于设定范围下限,湿度采样值微低于设定范围下限,湿度采样值在设定值范围内,湿度采样值微高于设定范围上限,湿度采样值远高于设定上限}。同时将湿度H的论域定义为{-2,-1,0,1,2}。得到土壤湿度变化模糊规则表,如表1所示。
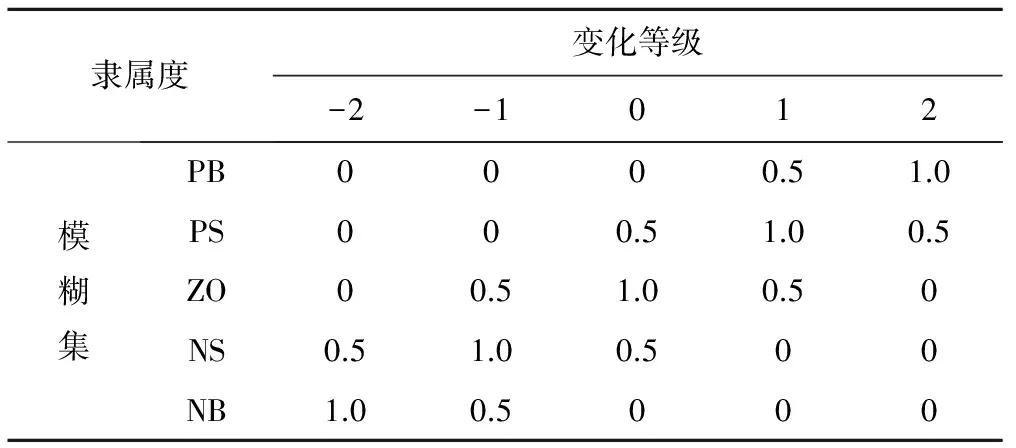
表1 土壤湿度偏差HE隶属度表
将光照强度偏差LE同样分为5个模糊集:{NB,NS,ZO,PS,PB},其对应的物理状态分别为{光照度采样值远低于设定范围下限,光照度采样值微低于设定范围下限,光照度采样值在设定值范围内,光照度采样值微高于设定范围上限,光照度采样值远高于设定上限}。光照强度LE的论域为{-2,-1,0,1,2}。得到土壤湿度偏差变化率模糊规则表,如表2所示。
将输出即比例电磁阀的开度U分为5个模糊集:{OF(open full),OB(open big),OM(open middle),OS(open small),CL(close)}[3],对应的物理状态分别为{比例电磁阀全开,比例电磁阀大开,比例电磁阀半开,比例电磁阀微开,比例电磁阀关闭},比例电磁阀的开度U的论域为{0,0.5,1,1.5,2}。得到输出比例电磁阀开度U的模糊表,如表3所示。

表2 光照强度偏差LE隶属度表
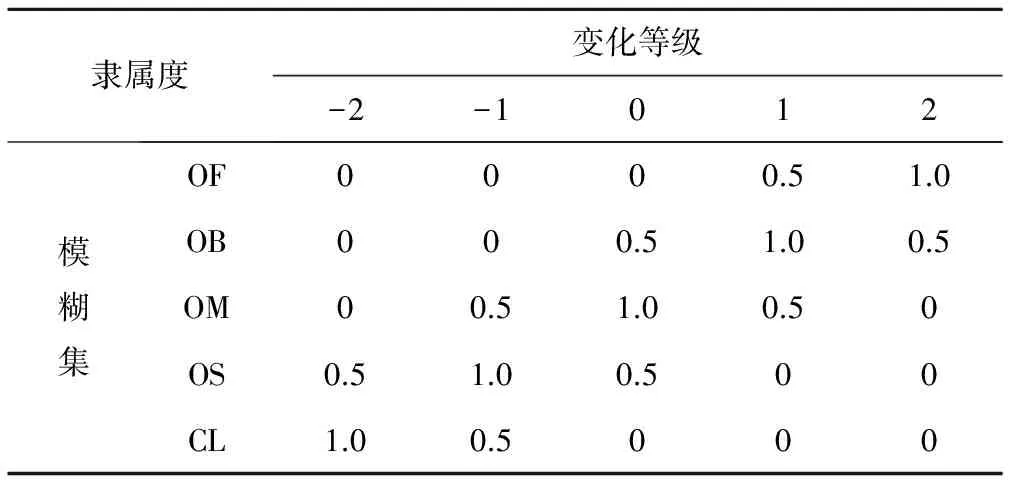
表3 输出比例电磁阀开度U隶属度表
本设计采用工程上常用的三角型隶属度函数作为模糊控制系统子集的隶属度函数,三角形隶属度函数如式(3)所示。
(3)
根据现场实际操作经验制定模糊控制规则,制定控制规则如表4所示,共25条规则,例如:
(1)当湿度采样值远小于设定范围下限,且光照度远小于设定范围下限,将比例电磁阀阀门大开;
(2) 当湿度采样值远小于设定范围下限,且光照度处于设定范围内,将比例电磁阀阀门全开;
(3)当湿度采样值稍小于设定范围下限,且光照度处于设定范围内,将比例电磁阀开至半开;
(4)当湿度采样值稍大于设定上限,且光照强度稍大于设定范围上限,将比例电磁阀开至微开;
(5)当湿度采样值远大于设定上限,且光照强度稍大于设定范围上限,将比例电磁阀关闭。
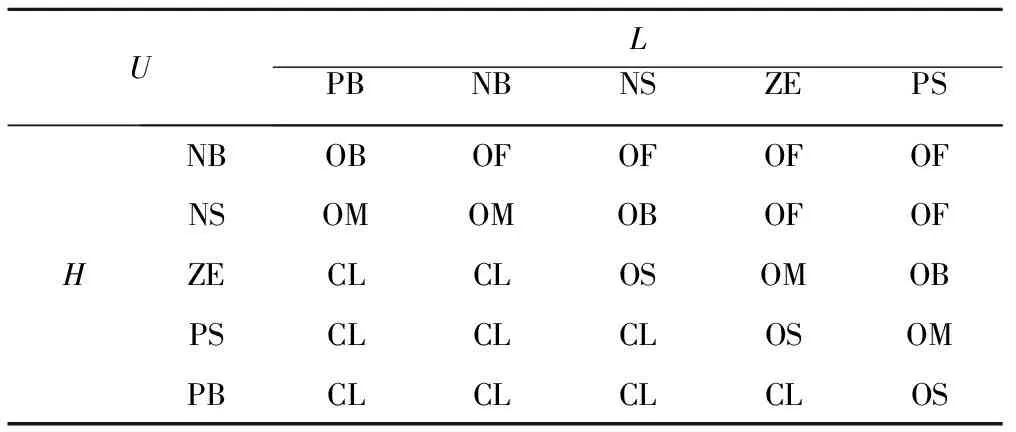
表4 智能滴灌控制系统模糊控制规则表
对模糊推理得到的模糊集合,采用最大隶属度法对其进行反模糊化[4]。
3 灌水器滴灌系统模糊控制仿真设计
在MATLAB软件中,对灌水器模糊控制器进行SUMILINK仿真研究,建立一个多变量二维模糊控制器,输入为HE、LE,输出为U。如图3所示。
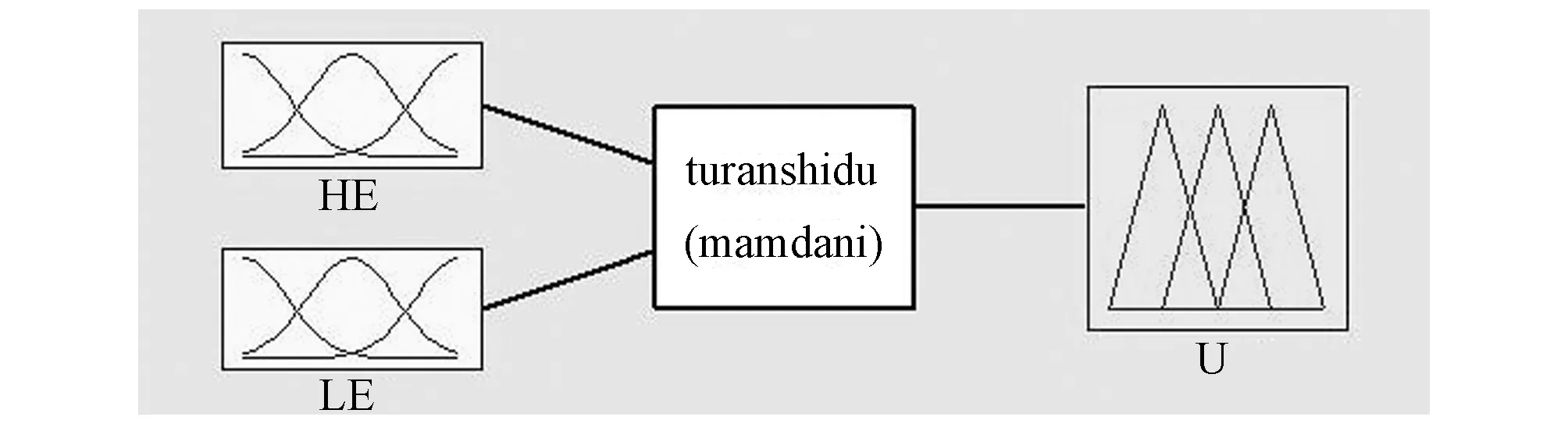
图3 智能滴灌控制系统二维模糊控制器
进入隶属度函数编辑器(Membership Function Editor) 修改输入语言变量的论域为(-2,2),输出语言变量的论域(0,2),并将输入输出隶属度函数选择为三角形隶属度函数[5]。土壤湿度偏差HE隶属度函数、光照强度偏差LE隶属度函数、比例电磁阀开度U隶属度函数,如图4,5,6所示。
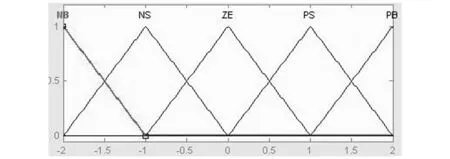
图4 土壤湿度偏差HE隶属度函数
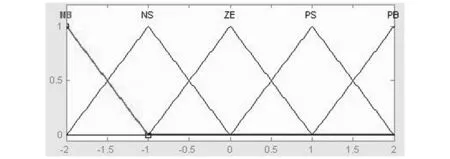
图5 光照强度LE隶属度函数
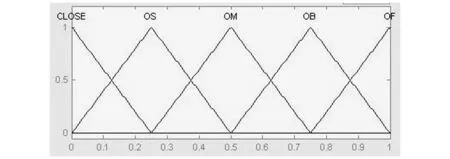
图6 输出比例电磁阀开度U隶属度函数
建立了输入输出模糊变量子集后,根据表4,对智能模糊滴灌控制系统制定模糊控制表。在SIMULINK模糊控制器Rule Editor中添加模糊控制规则,共25条规则。在Rule Editor编写的规则列表如图7所示。
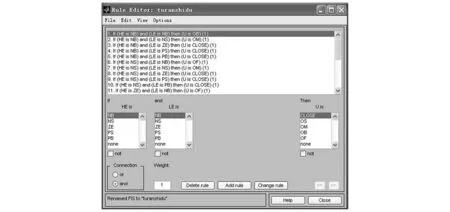
图7 智能滴灌模糊控制系统模糊控制规则
模糊规则制定完成后,在SIMULINK环境下建立滴灌控制系统模糊控制仿真结构图,并对其系统进行仿真实验。仿真结构如图8所示,仿真曲线如图9所示。
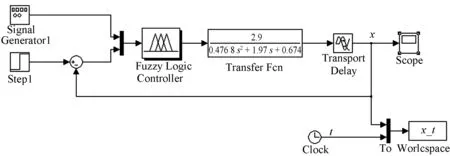
图8 滴灌系统模糊控制仿真结构图
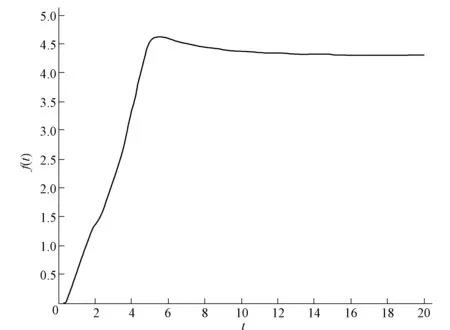
图9 滴灌系统模糊控制仿真曲线
针对滴灌系统,为了对比模糊控制与PID控制的控制效果,特对滴灌系统做了PID控制仿真。其中,PID控制仿真结构如图10所示,PID控制仿真曲线如图11所示。
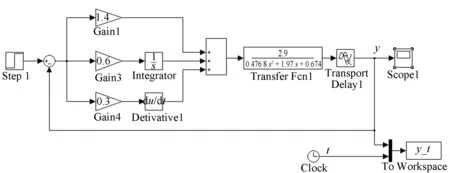
图10 滴灌系统PID仿真结构图
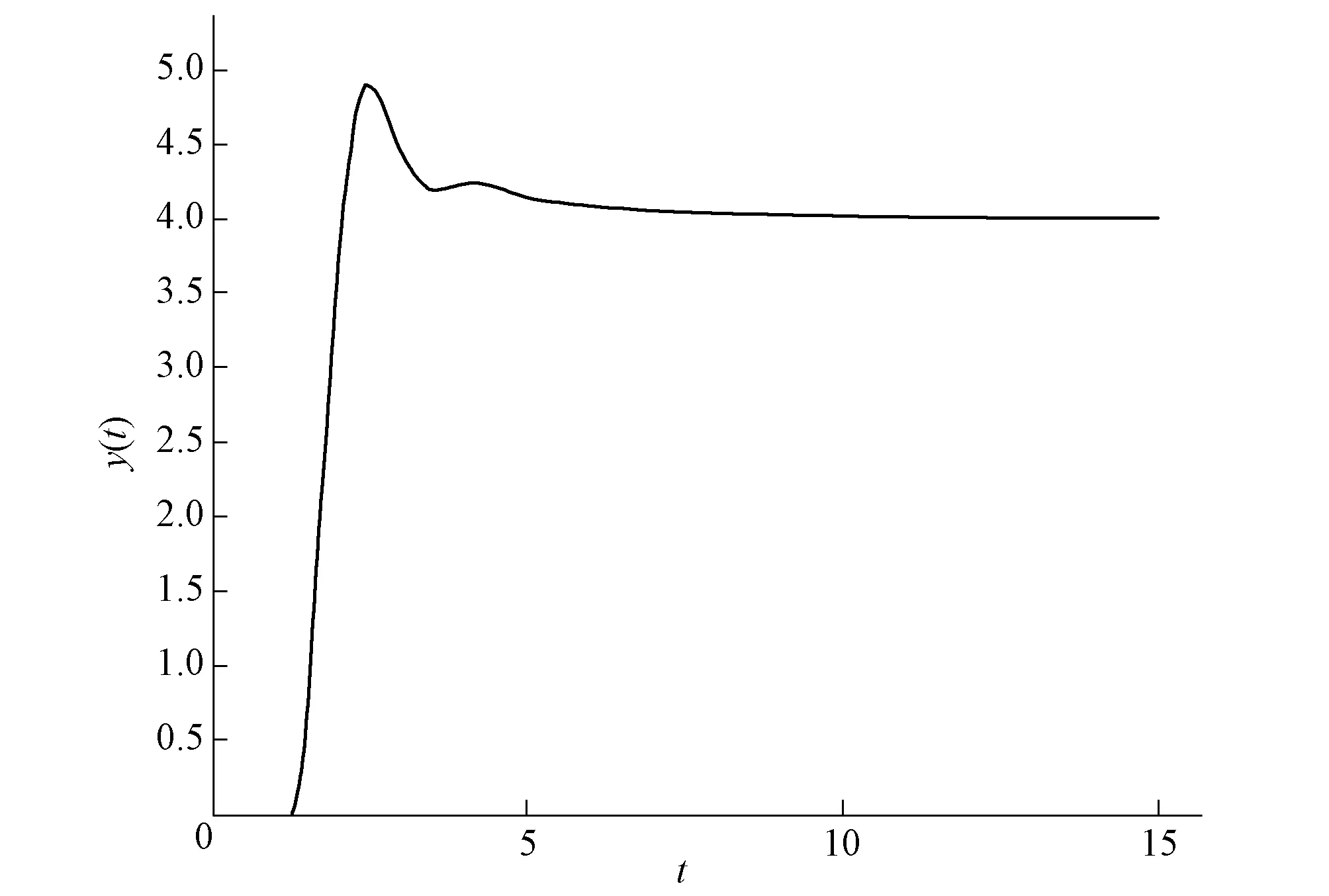
图11 滴灌系统PID控制仿真曲线图
对比图9和图11仿真曲线可以看出,模糊控制比PID控制具有响应速度快,超调量小,控制精度高和稳健性强等特点。
4 结 论
本论文分析了滴灌控制系统的组成,设计了基于模糊控制算法的智能滴灌控制系统。针对灌水器滴灌系统,制定了模糊控制规则,并在SIMULINK环境下建立了模糊控制和PID控制系统结构图,通过两个系统的仿真曲线比较,模糊控制系统具有控制响应速度快,超调量小,稳健性强等特点。
[1] 姜 源,郑玉丽.基于无线传感器网络的智能大棚控制系统[J].现代电子技术,2011,(11).
[2] 李书巳.模糊控制基本原理与实现方法研究[J].数字技术与用,2015,(5):7.
[3] 赖真华,芮延年.随机出水系统的水位模糊控制与仿真研究[J].装备制造技术,2014,(12):28-29,32.
[4] 张 涛.锅炉水位实验系统PCI总线改进及模糊控制组态仿真[J].电气自动化,2015,(2):90-92.
[5] 陈慕君,张剑锋. 温室大棚温湿度检测系统的模糊控制器设计[J].科技创新与生产力,2012,(9):101-103.
猜你喜欢
传感器世界(2022年7期)2022-10-12
湖北农业科学(2022年12期)2022-07-21
成都信息工程大学学报(2021年6期)2021-02-12
天津农林科技(2020年3期)2020-08-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
节水灌溉(2018年10期)2018-11-01
江苏农业科学(2018年15期)2018-09-10
农业工程技术·温室园艺(2016年9期)2017-04-23
