
定容积多通道充气系统的仿真与设计
2017-03-09 02:45黄雪琴范伟军
中国测试 2017年2期
黄雪琴,范伟军,郭 斌,赵 静
(1.中国计量大学计量测试工程学院,浙江 杭州 310018;2.杭州沃镭智能科技股份有限公司,浙江 杭州 310018)
定容积多通道充气系统的仿真与设计
黄雪琴1,范伟军1,郭 斌1,赵 静2
(1.中国计量大学计量测试工程学院,浙江 杭州 310018;2.杭州沃镭智能科技股份有限公司,浙江 杭州 310018)
针对传统恒压供气系统普遍存在控制精度低、充气速度慢的问题,设计一套由PID算法控制的电气比例阀和电磁阀独立控制的充气系统。采用大、小管径多通道组合方式,对定积容器进行充气实验,系统采用高速数据采集卡,结合LabVIEW软件分析实验数据。基于气动系统的流量特性,分别建立单通道、双通道、三通道充气装置的充气时间与管道管径、长度的数学模型。Matlab仿真曲线表明,对于定积容器,充气管路的长度越小、管径越大、并联的管路越多,充气时间越短;目标充气压力越高,管路长度对充气时间的影响越明显。实验数据验证仿真模型的正确性,采用多通道组合供气方式缩短充气时间,提高精度。
Matlab仿真;多通道组合充气;定积容器;PID
0 引 言
因气动元件的精确化、高速化、集成化趋势,气动技术被广泛应用于各行各业[1]。以气动装置作为动力供给的生产线也越来越多[2],在传统恒压供气装置中,压力控制器供气主要用于传感器校准、压力测量等[3],但普遍存在一些缺陷,如设备气路管径小、充气速度慢、调节时间长,导致系统在大容器大范围调节时容易出现超时错误;供气控制精度低,电磁阀易高频长时间动作,对电磁阀的性能损耗极大[4];能量利用效率偏低。在实际生产检测过程中需要缩短充气时间、提高工作效率,因此如何提高压力控制器气动环节的充气速度是急需解决的问题。解决问题的关键在于对气路执行机构的优化设计和控制方法的选择。
控制方法最简单常用的莫过于基于直动电磁阀的气压控制[5],设计简单、成本低,但精度低、充气速度慢。随着技术的发展,高速开关阀被应用到气压控制中。国外采用自适应PID算法结合电磁阀的多通道闭环反馈控制气动系统[6],PID算法加模糊控制也广泛应用于气动系统中[7],也有结合高速开关电磁阀在气动系统中应用的实例[8]。国内南京航空航天大学自动化学院基于高速开关阀结合PID算法[9]进行压力控制的设计,浙江大学机械工程系在高速开关阀和PID算法的基础上又加入了PWM控制并采用闭环控制的设计理念进行气压控制[10],相同环境温度下,4L的容器,采用2mm的单管道充气至300kPa,充气时间从19.43s降到了12.47s[10-11]。
由于高速开关阀是以电磁铁作为电-机械转换的元件,硬件上必然存在死区饱和特性,加之传统数学模型的不准确,不易实现系统的高精度和高性能控制。直到电气比例阀的出现,通过计算机能很好地实现气压的精密控制,与其他控制方式相比,具有结构简单、工作可靠、控制精度高的特点。
对比以上控制方法的优缺点,选择电气比例阀结合PID算法,在管路设计上加入多通道多管径配合供气的理念,设计了一套定积充气装置。多通道采用大、小管径搭配方式,大管径充气可提高充气速度,小管径充气可提高压力控制精度。
1 多通道充气系统设计
1.1 系统硬件设计
定容积充气时,为了提高充气速率,通常需加大管径充气管道,但大管径供气会引起压力的控制精度变低。为解决充气管径与控制精度的矛盾,现采用大管径、小管径多通道组合方式充气,并结合电气比例阀的控制策略,设计了多通道快速充气装置,充气装置的气路控制如图1所示。气路系统包括气源处理模块、气路控制模块及压力传感器。气源处理模块包含气源、二联件、气罐、定积容器;气路控制模块包含电气比例阀、电磁阀、精密调压阀。1口对应12mm管径的大通道,2口对应管径为10 mm的通道,3口对应8mm的小管径通道。大管径通道用于提高充气速率,小管径通道用于控制充气压力的精度。
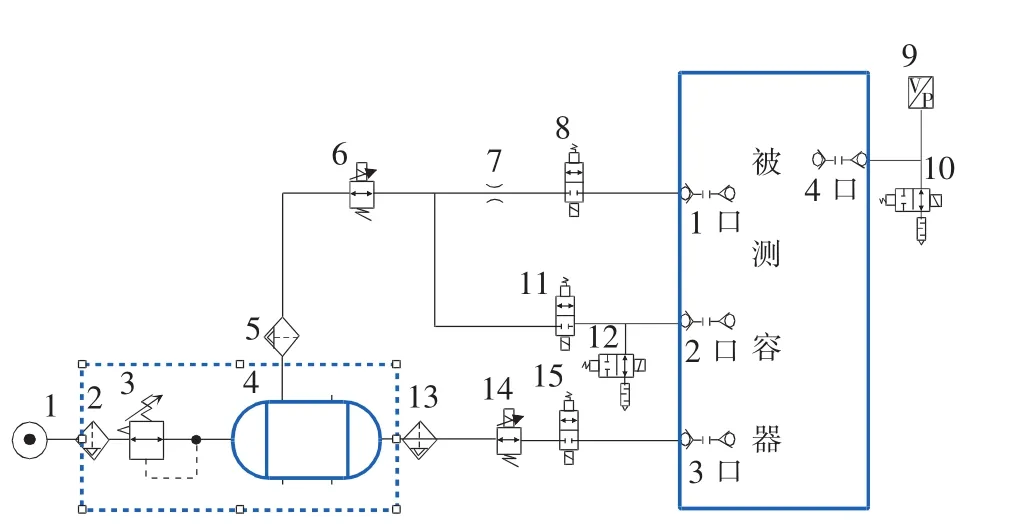
图1 多通道充气装置气路控制图
充气装置的数据采集与控制系统如图2所示,主要由PC、电源模块、数据采集卡、压力传感器、传感器调理电路组成。
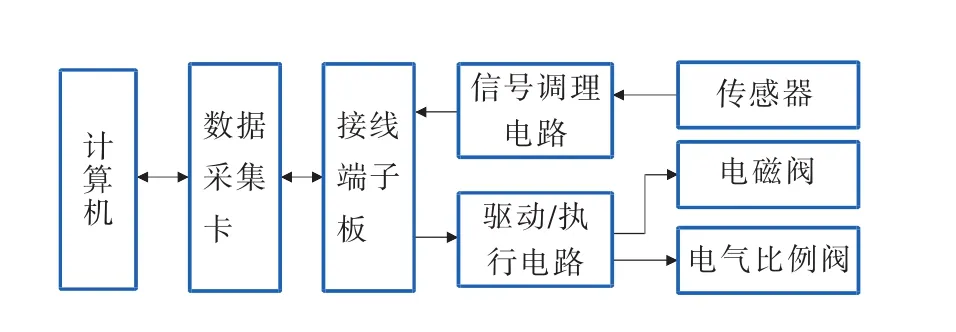
图2 数据采集控制系统框图
数据采集卡负责采集气路中压力传感器的A/D值,同时提供控制I/O口的信号。数据采集卡的速率达100kHz以上,系统采用功率放大电路驱动固态继电器,实现电磁阀和电气比例阀的高精度控制和压力信号的同步实时采集。气动系统中的压力调节通过精密调压阀调节;电气比例阀,控制信号在0~5V,对应0~1MPa;高精度压力传感器选用Micro公司,精度0.075%FS,量程1.2MPa,响应时间为0.1 ms的压阻型压力传感器,输出信号为4~20 mA DC,通过传感器信号调理电路转换成1~5 V的电压信号,接入数据采集卡。
1.2 充气控制方案
气动系统设计了独立控制的3路管道对定积容器充气,3路管道由电磁阀、电气比例阀独立控制的管道进气,LabVIEW软件编写气路控制程序,当压力小于设定值时(软件可设),开启三通道的电磁阀和电气比例阀对容器充气,当压力差值到达设定值的±10%时,关闭大口径通道1和通道2的电磁阀和电气比例阀,小管径通道3的电气比例阀进入PD控制模式,当压力差值到达设定值的±5%时,电气比例阀进入PID控制,对气压进行微调,实现高精度,快速充气的目的。本控制系统采用分段式状态控制,可以提高调节时间、减少阀门的动作、提高控制精度。
2 气动系统仿真建模
设计定积容器充气控制装置时,需根据充气节拍要求,确定多通道充气装置的通道数目、每个通道的管径以及充气管道的长度,因此需要对充气装置充气时间进行建模仿真,以便后续的工程设计。考虑充气时间比较迅速,热量来不及通过容器壁与外界进行交换,可视充气过程为绝热过程[12-13],对多通道充气装置可作如下假设:
1)压缩空气经过节流口的流动为等熵流动;
2)容器内、节流孔内的压力、温度和密度是均匀分布的,且为绝热容腔。
由热力学第一定律知热量与流速、压力、质量的关系:

式中:δq——热量,J;
p——压力,Pa;
ν——质量体积,L。
参考范德瓦尔方程,由u=u(T,ν)可得流速与温度,质量体积的关系:

式中:T——热力学温度,K;
Cν——质量定容热容,J;
a——常数。
考虑定积容器充气为绝热过程,热量变化为0,即

把式(2)、式(3)代入式(1)可得质量定容热容与流速、压力的等式为

对式(4)积分,得实际气体绝热过程为

式中:C——常数;
b——常数;
R——气体常数,对空气,R=287N·m/(kg·K)。
考虑到充气过程为绝热过程,结合式(5),参考相关文献[2],推导可得到充气时间t满足下式:
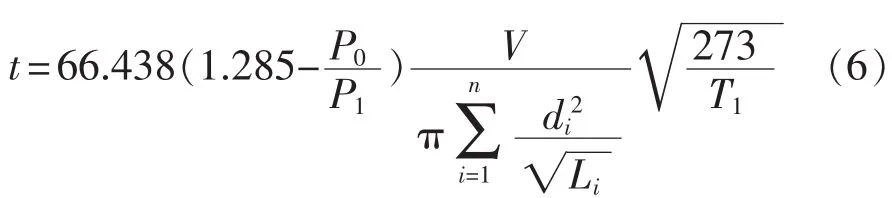
式中:P0——容器内的初始绝对压力,kPa;
P1——气源的绝对压力,kPa;
V——充气容积,L;
di——对应管道内径,mm;
Li——对应管道长度,m;
T1——气源绝对温度,K。
为研究管道长度、管径和管道数目对充气时间的影响,现选择10 L容器为充气对象,分别研究单通道不同管径、不同管长定积充气,双通道不同管径定容积充气和三通道不同管径等情况下的定容积充气仿真模型,建立充气时间与管径、管长的函数关系。
1)单通道不同管径定容积充气建模
为研究管径对充气时间的影响,设置足够小的管长,可以忽略管长对充气时间的影响。设置单通道管道长度设为20 mm,管道连接接口均为3/8 in(1 in= 2.54cm)忽略摩擦力带来的影响,设置不同单通道管道外径为8,10,12mm (内径分别对应为6,7.5,9mm),充气气压目标值分别设定为200,300,400,500,600kPa,对容积为10L的容积进行充气仿真,n取1,T1为气源绝对温度,取293K,得到数学模型为

式中di取8,10,12mm代入计算。
根据数学模型绘制了充气气压至 200,400,600kPa时的管径d与时间t关系的仿真曲线图,如图3所示。
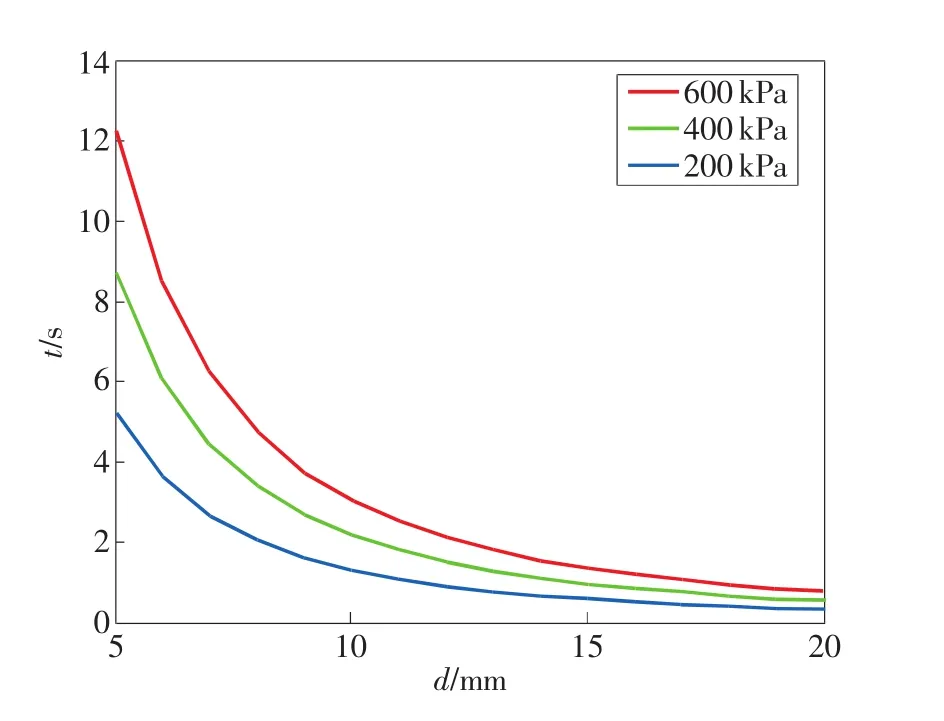
图3 管径与时间仿真图
对于定积容器,充气管路的管径越大,充气时间越短,目标充气压力越高,充气时间越慢。
2)双通道不同管径定容积充气建模
为研究管径对充气时间的影响,设置足够小的管长,可以忽略管长对充气时间的影响。设定管长都在20 mm,管道外径分别为8,10,12 mm的管路,两两组合,对容积为10L的容器进行充气仿真。因为等截面直管道内,气体流动速度<70m/s,密度变化小于2%,可忽略密度变化,定义气体状态为一维不可压缩流动[1]。对并联回路,在不可压缩状态下的合成有效截面积为各支路管道的有效截面积,单位mm2。建立仿真模型为

式中:di、dj——管道内径,分别取8,10,12mm中的两个数据;
P0——容器内的初始绝对压力,kPa;
P1——气源的绝对压力,kPa。
对于定积容器,充气管路的长度、管径一致,并联的管路越多,充气时间越短,目标充气压力越高,充气时间越慢。
3)三通道不同管径定容积充气建模
为研究管径对充气时间的影响,设置足够小的管长20mm,可以忽略管长对充气时间的影响。设定3根管道外径分别为8,10,12mm的管道,3根管道并联分别从3个不同的节流口对10 L的定积容器进行充气仿真,仿真模型见下式:

式中d1、d2、d3为管道内径,分别取8,10,12mm。
根据三通道不同管径定容积充气模型,在相同管径下,对同一条件下的容器充气,管长越长,充气时间越长,压力越大,效果越明显。
4)单通道不同管长定容积充气建模
设置单管道,外径为10mm,管长分别为20,50,100,200,400,800 mm,对10 L的定积容器充气仿真。理论计算的有效面积为尼龙管道的有效截面积,单位为mm2,L为管长,单位m。
查表6-3[1]得,外径为8 mm时,S′取18 mm2;外径为10mm时,S′取28mm2;外径为12mm时,S′取43mm2。根据上下游压力不同,选择对应的式(10)、式(11)计算

式中:P2——充气结束时的绝对压力,kPa;
R——气体常数,对空气,R取287N·m/(kg·K);
P20——气罐内初始绝对压力,kPa;
T1——容器内温度,K;
L——管道长度,m;
V——容器体积,m3;
S——有效截面积,mm2。
对一元等熵流动的气体,b取0.528,κ取1.4。得到管长L与时间t的仿真曲线如图4所示。
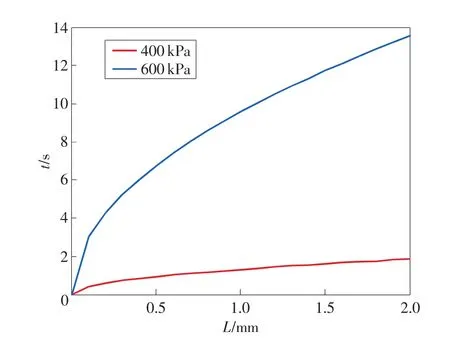
图4 管长与时间关系图
在相同管径情况下,对同一状态的容器进行充气,管长越长,充气时间越长。目标充气压力越高,管路长度对充气时间的影响越明显。
3 实验验证
根据影响充气快慢的因素,分别对对单通道不同管径、不同管长定积充气,双通道不同管径定容积充气和三通道不同管径定积充气进行实验验证,实验数据与相同条件下的仿真数据做对比。
1)单通道不同管径定容积充气
管道内径设置为8,10,12mm,管长设置为20mm,对10L的定积容器充气至200,300,400,500,600kPa,分别记录数据于表1~表3,与相应的仿真数据作对比。

表1 单通道8mm管径定容积充气数据对比

表2 单通道10mm管径定容积充气数据对比

表3 单通道12mm管径定容积充气数据对比
对比单通道不同管径定容积充气的仿真数据和实验数据,最大偏差值不超过0.577s,在允许范围内,实验数据验证了仿真模型的正确性。
2)单通道不同管长定容积充气
管道内径设置为10mm,管长设置为20,50,100,200,400,800mm,对10L的定积容器充气至600kPa,记录表4的实验数据并和同条件下的仿真数据做比较。
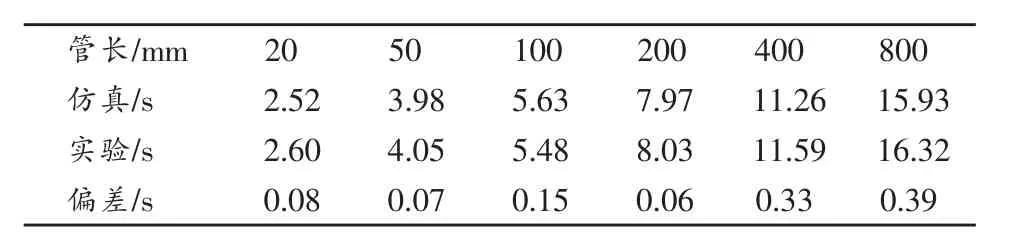
表4 单通道不同管长定容积充气数据对比
对比单通道不同管长定容积充气的仿真数据和实验数据,最大偏差值不超过0.39s,在允许范围内,实验数据验证了仿真模型的正确性。
3)双通道不同管径定容积充气
设定管长都在20 mm,管道外径分别为8,10,12mm的管路,两两组合,对容积为10L的容器,充气至200,300,400,500,600kPa,记录表5~表7的实验数据并和同条件下的仿真数据做比较。
比较双通道不同管径定容积充气实验数据和仿真数据,偏差小于0.553s,仿真模型验证了实验的正确性。
4)三通道不同管径定容积充气仿真
设置三路通道,管径大小为8,10,12 mm,管长设置为20 mm,对容积为10L的容器,充气至200,300,400,500,600kPa,记录表8的实验数据并和同条件下的仿真数据做比较。
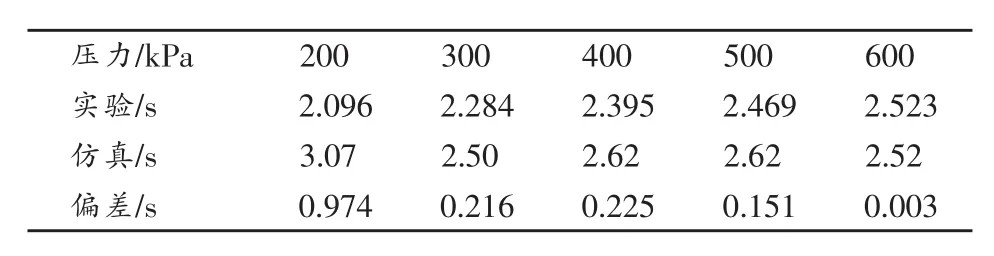
表5 双通道8,10mm定容积充气数据对比
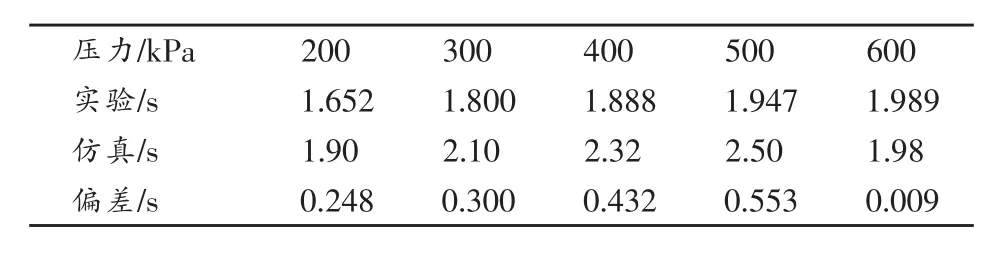
表6 双通道10,12mm定容积充气数据对比
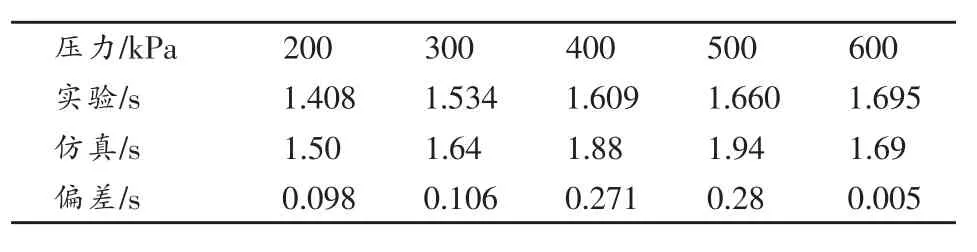
表7 双通道8,12mm定容积充气数据对比

表8 三通道不同管径定容积充气数据对比
对比三通道不同管径定容积充气的仿真数据和实验数据,最大偏差值不超过0.515s,在允许范围内,实验数据验证了仿真模型的正确性。
对比单管道、双管道、三管道的实验数据和仿真数据,误差都小于0.577s。对10L的容器,充气目标值为600kPa,管道内径为8mm,单通道电磁阀控制,充气时间为6.90s,内径为8,12mm的电磁阀和电气比例阀控制的双通道充气时间为2.523s,管径为8,10,12 mm的三通道由电磁阀和电气比例阀独立控制的组合充气方式的充气时间为1.855s,多管道、多管径的组合式充气方法提高了充气速度、缩短了充气时间。
4 常用方法对比
将多管道、多管径结合电气比例阀的组合式充气方式与常用的基于PID算法的电磁阀[11]或者高速开关阀控制[12]的单通道、双通道充气系统做对比,记录数据于表9。
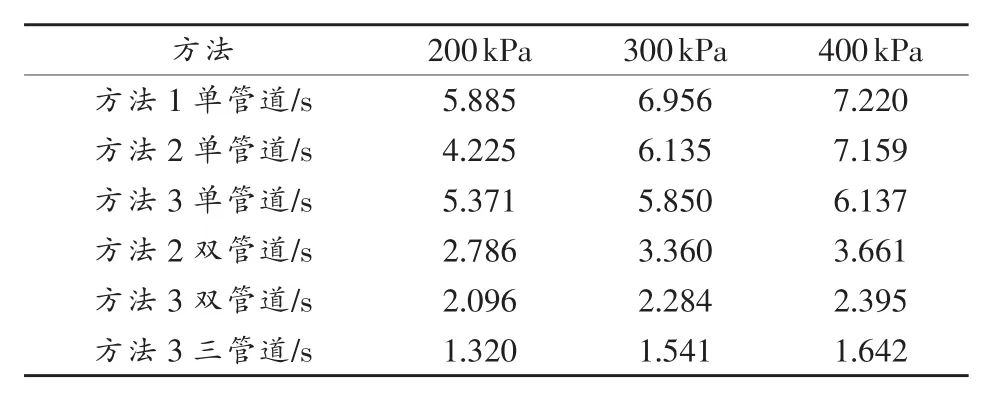
表9 常用方法充气数据对比
方法1为基于电磁阀的单管道充气装置,方法2为基于高速开关阀和电磁阀的双管道充气装置,方法3为多管道、多管径结合电气比例阀的组合式充气方式。对10L的容器充气至200,300,400kPa,单管道直径为8 mm,管长设置为20 mm,双管道直径为8,10mm,3管道直径为8,10,12mm。
比较采用多通道、多管径结合电气比例阀的方法3对比基于电磁阀的方法1和基于高速开关阀的方法2的实验数据,不管是单通道、双通道还是三通道充气方式,都大幅度缩短了充气时间,有助于加快工业应用中的生产节拍,提高工作效率。
5 结束语
对比多通道、多管径结合电气比例阀的控制方法所得的实验数据和仿真数据,对于定积容器,充气管路的长度越小、管径越大、并联的管路越多,充气时间越短;目标充气压力越高,管路长度对充气时间的影响越明显。对比实验数据表明,多通道组合式充气方式比常用的基于电磁阀的单通道供气方式和基于高速开关阀的双通道充气方式,充气时间减少,误差小。对于现设计的气动系统装置存在占地面积大,管路复杂,线路多,软件设置界面还不够美观,适应的压力范围区间小的缺陷,后期加入高压情况下的切换调节方案,并优化算法界面,将装置做成便携式的设计来改进。
[1]DRUMEA P,BLEJAN M,DUMITRESCU L,et al. Mechatronic system for air pressure control[C]∥Electronics Technology, 2006.ISSE’06.29th International Spring Seminar on IEEE,2006:325-328.
[2]赵彤.现代实用气动技术[M].北京:机械工业出版社,2003:26-50.
[3]LIU Q,XU X.Application of flexible fuzzy control in membrane structure inflation system[C]∥E-Product EService and E-Entertainment(ICEEE),2010 International Conference on IEEE,2010:1-4.
[4]李家书.气动技术的应用[J].液压气动与密封,2006(4):6-10.
[5]曹良宇,殷新华.基于直动电磁阀的气压控制系统仿真研究[J].计测技术,2012,32(5):22-26.
[6]ZENTNER S,SCHAFER E,FAST G,et al.A cascaded control structure for air-path control of diesel engines[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering,2014,228(7):799-817.
[7]PRECUP R E,HELLENDOORN H.A survey on industrial applications of fuzzy control[J].Computers in Industry,2011,62(3):213-226.
[8]TSAI J,KOCH C R,SAIF M.Cycle Adaptive feedforward approach controllers for an electromagnetic valve actuator[J].Control Systems Technology IEEE Transactions,2012,20(3):738-746.
[9]涂勇辉.基于ARM的较大容积容器压力控制器的设计[J].传感器与微系统,2010,29(4):123-125.
[10]薛蕾.基于等温容器的超大流量恒压供气系统的研究[D].杭州:浙江大学,2011.
[11]唐君君.较大容积容器的压力控制研究[D].南京:南京航空航天大学,2009.
[12]谭俊良,余同彦,魏占芳.浅谈中央充放气系统充放时间计算[J].汽车实用技术,2010(2):13-15.
[13]吉恒松,王谦,韩新月,等.热力学第一定律在充气过程求解中的应用[J].广州化工,2013,41(22):165-167.
(编辑:刘杨)
Simulation and design on specified-volume multi-channel inflation system
HUANG Xueqin1,FAN Weijun1,GUO Bin1,ZHAO Jing2
(1.College of Metrology Measurement Engineering,China Jiliang University,Hangzhou 310018,China;2.Hangzhou Wolei Intelligent Tech Co.,Ltd.,Hangzhou 310018,China)
In view of low control accuracy and slow inflation velocity generally seen in traditional constant pressure air supply system,an inflation system respectively controlled with electrical proportional valve and solenoid valve based on PID algorithm is designed and built in compound mode with large and small diameter channels for air inflation experiment on specified-volume vessel.The system employs high-speed data acquisition card on the basis of LabVIEW software to analyze the experimental data.On the strength of the flow characteristics of pneumatic system,the mathematical models for air inflation time and tube diameter and length of single-channel,dualchannel and three-channel inflatable device are established in respective.According to Matlab simulating curve,for the specified-volume vessel,the shorter length of air inflation tube and the bigger the tube diameter,more tubes need to be paralleled with shorter time for air inflation;the higher the target inflation pressure,more effect from the length of tube will be imposed on the air inflation time.The experimental results have verified the correctness of the simulation model and that multi-channel inflation system helps to shorten air inflation time and improve accuracy.
Matlab simulation;multi-channel inflation;specified-volume vessel;PID
A
:1674-5124(2017)02-0082-05
10.11857/j.issn.1674-5124.2017.02.017
2016-06-09;
:2016-07-11
国家自然科学基金项目(51405463)浙江省公益性技术应用研究计划项目(2014C31105)
黄雪琴(1991-),女,浙江温州市人,硕士研究生,专业方向为精密仪器及机械。
猜你喜欢
吉林电力(2022年1期)2022-11-10
环球时报(2022-04-28)2022-04-28
成都信息工程大学学报(2021年4期)2021-11-22
煤气与热力(2021年7期)2021-08-23
建材发展导向(2021年11期)2021-07-28
煤气与热力(2021年5期)2021-07-22
军事文摘·科学少年(2021年6期)2021-06-24
工业设计(2020年3期)2020-05-14
中国科技纵横(2017年15期)2017-09-09
科技传播(2017年2期)2017-04-06
