
智能车设计中增量式PID控制算法的运用
2017-03-09 23:34徐世豪
中国新通信 2017年2期
徐世豪
【摘要】 智能车是现代科技研究与发展的重要方向之一,控制系统是智能车研发的关键所在。本文以增量式PID控制算法作为智能车研究的切入点,通过实验分析得出采用增量式PID控制算法能够起到提升智能车系统控制的目的,提升车辆的运动性能。
【关键词】 智能车增量式 PID控制算法
一、智能车总体方案设计
智能车的运行是基于传感器提前感知到道路的具体情况,进而通过内部控制系统发出相应的指令,做出相应的应对措施,调整行驶状态,达到顺利通过的目的。综合现有研究,智能车的运行状态如下图1所示: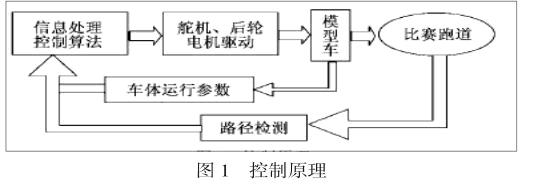
控制器的输入是传感器信息(道路检测传感器和速度传感器信息);输出是执行器件(舵机和直流电机)的控制参数。控制器要完成的主要任务有:图像采集、速度测量、图像处理、方向和速度控制。根据任务需要,控制器中应包含有图像采集模块、引导线提取算法、图像识别算法、脉冲计数模块、定时器模块、速度测量算法、方向控制算法、速度控制算法[1],如图2所示。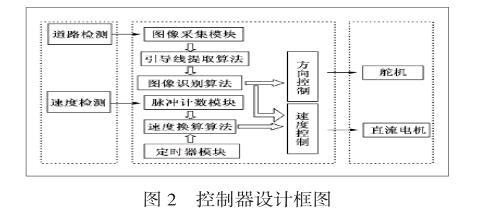
二、智能车的控制算法
2.1 PID参数的影响
采用比例系数kp的目的,在于通过提升智能车系统的响应速度以提升其调节的精度,但需要合理控制kp的数值,不宜过大和过小。例如,当kp数值过大,则会加速系统的响应速度,导致超调进而危及到系统的稳定性。当kp数值过小,则会降低系统的响应速度而调节的精度随之下降,进而导致系统调节的时间被延长,破坏系统的动态性能与静态性能。在实验过程中,模型车在行驶过程时,随着kp系数增加舵机的反应速度得以提升,模型车在横向转向时,舵机迅速做出反应并及时调整方向。然而,当模型车处于直线行驶時,因车速较快导致出现控制不灵的问题,表现为:高速行驶过程中,模型车左右晃动难以及时稳定方向,致使直线行驶变成了摇摆不定的曲线。同时,因方向不定的影响,模型车的速度得不到提升。
积分作用系数ki的作用是消除系统的稳态误差。ki越大,系统的稳态误差消除越快,但ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若ki过小,将使系统静态误差难以消除,影响系统的调节精度。采用微分作用系数kd的目的在于避免智能车在行驶过程中向任何方向发生偏差并及时发出警报,以起到提升智能车动态性能的作用。需要注意的是应根据智能车的特性设定kd的值,过大或过小均难以发挥出应有的功效,影响到系统功能的发挥。此外,对于智能车弯道方向的行驶要求舵机足够灵敏,能够随时根据道路的实际情况做出反应,以适应各类突发情况。同时,在直道行驶过程中,需要稍微降低舵机的灵敏度,以降低频繁转向带来的阻力,保障智能性的稳定性。
2.2 PID参数整定
PID算法控制式的任何一个参数的设定均会对智能车的控制效果产生直接影响,为达到最佳的控制状态,需要实验过程中尽可能的测试多组数据,以从中得出最佳参数,实现最佳控制状态。下面就以舵机参数的整定作为案例分析PID算法参数的整定过程。其一,结合相关理论选定符合需求的比例系数,将之加载到模型车上进行测试。经过不断的调整参数,观察效果直至能够随机控制舵机以匀速调整方向,记录该数值,将之作为最佳P算法的比例系数;其二,在获取到P算法的比例系数后,继续进行D算法的测试,同理不断调整参数并通过观察测试效果直至舵机对于引导线位置的快慢变化做出快速反应和不做出快速反应。记录该数值,获取到了pd算法的参数[2];其三,经过前面两个环节即实现了积分参数的整定,完成了PID参数整定的过程。积分参数科学整定,能够起到提升对智能车精确控制的作用,尤其是能够避免静态误差的不利影响。同时,在本文的设计中主要在于探究PID算法的运用,为此并未过于追求模型车能够达到实际测试车辆的精确,力求实现对之模型车速度的精确控制即可。经过实验发现,PID算法的运用能够达到良好的控制效果。模型车在直道路线行驶过程中,经过P控制可以减少转向的的灵敏度以快速将车速提升到预定值;在弯道行驶过程中,经过PD控制并加入微分项,能够提升转向的灵敏度,便于模型车能够快速适应不同车道的变化。
结束语:综上所述,在智能车设计中采用增量式PID控制算法能够取得良好的效果。智能车直线行驶过程中,舵机基本处于平静状态而且智能车的速度达到最高;在弯道行驶过程中,舵机能够迅速做出反应,车速随之下降并顺利通过。该实验效果充分说明了PID控制算法的运用能够达到智能车设计的要求。但如需进一步强化智能车的性能,尚需要辅助其他算法以不断优化智能车的性能。
参 考 文 献
[1]杨晓岚.PID算法在智能车中的应用.《实验科学与技术》, 2010, 08(4):187-189
[2]刘艳春,赵立双.基于增量式PID控制算法的恒温控制系统.《信息技术》, 2014(2):167-169
猜你喜欢
中国测试(2018年9期)2018-05-14
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年7期)2018-02-01
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
航空模型(2015年6期)2015-10-21
中国信息技术教育(2014年5期)2014-03-17
