基于励磁改进型矢量控制的车用交流感应电机启动控制研究
2017-03-07 11:22李军伟蔡良生
重庆交通大学学报(自然科学版) 2017年2期
李军伟,蔡良生, 高 松
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
基于励磁改进型矢量控制的车用交流感应电机启动控制研究
李军伟,蔡良生, 高 松
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
为解决电动车用交流感应电机(ACIM)启动时出现的大电流、小转矩问题,提出励磁改进型矢量控制的新方法,从ACIM控制策略角度考虑解决启动问题。在MMATLAB/SIMULINK环境下建立了ACIM改进前后的转子间接磁链定向矢量控制仿真模型和嵌入式自动代码生成模型。先进行仿真调试,再生成针对TI公司C28x系列DSP的C代码,手工编写TMS320F28335的底层驱动程序,在开发环境Code Composer Studio中完成了上层控制算法和底层驱动程序代码的集成,并将代码烧写到以TMS320F28335为核心的电机控制器中进行启动实验。对改进前后的控制策略进行仿真和实验对比。仿真和实验的结果表明:采用励磁改进型矢量控制的方法能够使ACIM在启动中降低启动电流并迅速提高启动扭矩。该方法比从启动设备和硬件结构上改进的常规方法更加节约成本,提高效率。
机电工程;交流感应电机;启动方式;矢量控制;软件仿真
0 引 言
ACIM具有低成本、高可靠性、免维护等特性,被广泛应用于工业生产和新能源电动汽车上。ACIM同样面临选型、启动、综合保护等诸多问题[1]。这些问题将严重限制ACIM的使用范围。ACIM启动时往往会出现启动电流大、启动转矩小等问题。评价ACIM的启动性能与直流电机一致,关键是对电机启动输出转矩的有效控制和对电机启动电流的有效抑制[2]。
现有的ACIM启动方法中降压启动、直流电机带动ACIM启动、软启动器和变频器辅助启动较为普及[3-5]。但是这些方法都是从启动设备或者硬件结构的改进上来解决ACIM启动问题,从开发的角度讲,增加了开发成本。矢量控制技术问世以来,人们一般集中于研究电机的稳态运行,而忽略了对启动方法的研究[6-7]。从ACIM控制策略角度考虑,提出在矢量控制的基础之上进行改进,通过先励磁再输出转矩的方法抑制启动瞬态电流,瞬速提升电机的启动转矩。相对于传统以启动仪器和硬件改进的方法来实现启动而言,这种软件的改进方法效率更高,成本更低,为更加完善的ACIM启动策略提供了一种新思路。
1 矢量控制电机启动
1.1 ACIM同步旋转坐标系动态数学模型推导
以ACIM磁链开环转差型矢量控制为启动策略改进的软件平台,其基本思想就是将交流感应电机等效成直流电机进行控制,获得与直流电机相似的调速性能。此种矢量控制结构是基于转子磁链定向的同步旋转坐标系来实现的。
为简化ACIM复杂的原始三相数学模型,首先通过坐标变换将静止的三相坐标系变换至两相静止坐标系,再推广至任意旋转坐标系中。其变换过程如图1,图2。
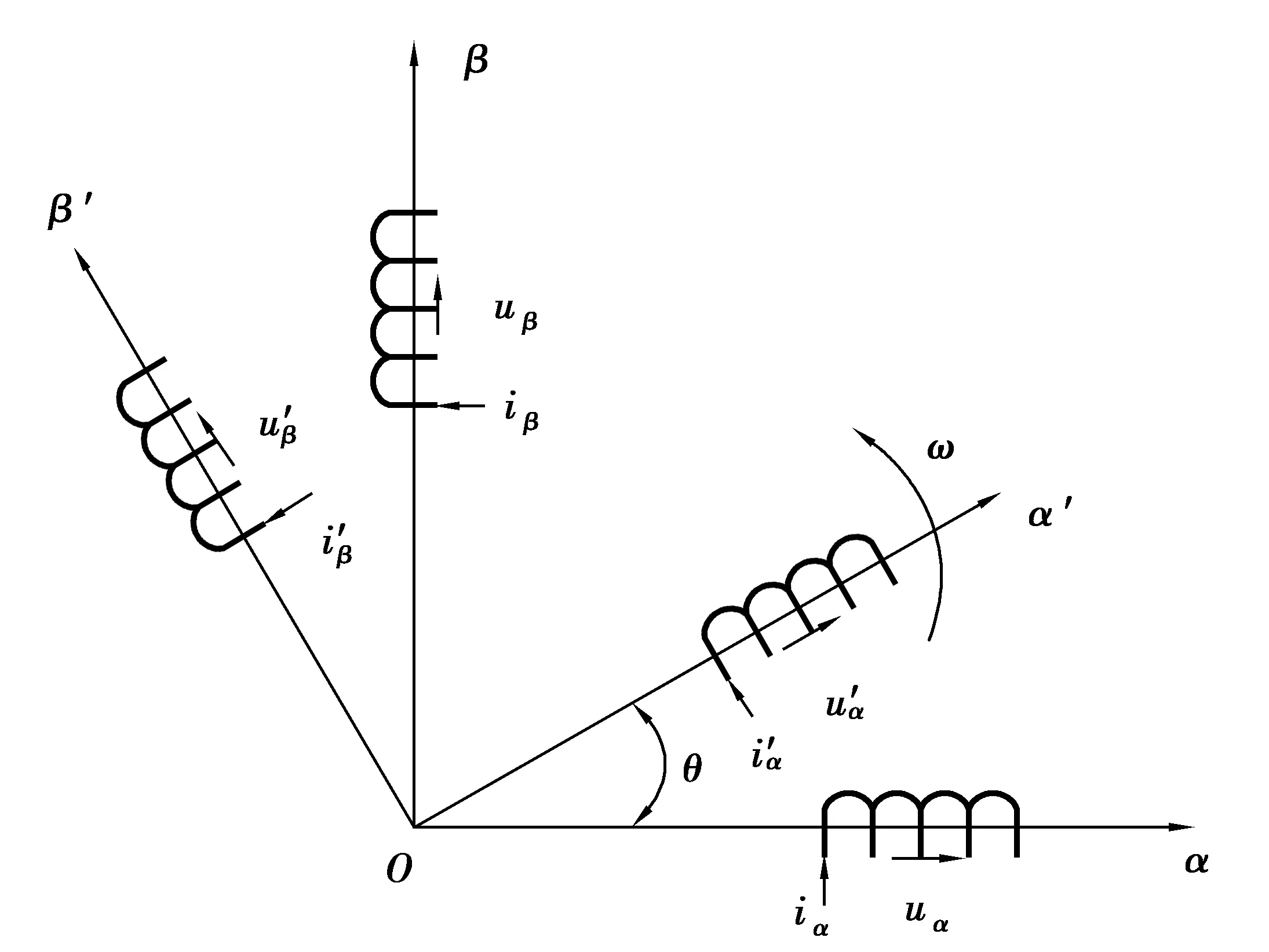
图1 定子两相静止坐标系及转子两相旋转坐标系Fig.1 Stator two-phase stationary coordinate system and rotor two-phase rotating coordinate system

图2 定子及转子两相坐标系到任意旋转坐标系的变换Fig.2 Conversion to any rotating coordinate system from stator and rotor two-phase coordinate system
首先,对原始三相坐标系进行坐标变换的运算,得到任意旋转坐标系下磁链方程为:
(1)
电压方程为
(2)
转矩方程为
Te=npLm(isqird-isdirq)
(3)
运动方程为
(4)
由式(1)的第3、第4行可以解出:
(5)
将式(5)代入式(1)的第1、第2行可以解出:
(6)
将式(5)代入式(3)整理得:
(7)
采用的ACIM为鼠笼式转子,其内部结构短路,因此,令urd=urq=0,代入式(2),电压方程整理得:
(8)
将式(5)、式(6)代入式(8),消去ird,irq,ψsd,ψsq再将转矩方程(3)代入运动方程(4),经整理后得任意旋转坐标系下状态方程:
(9)
确定的磁链开环转差型矢量控制采用按转子磁链定向的同步旋转坐标系,因此,需要在任意旋转坐标系的基础之上,令:
(10)
将公式(10)带入到任意旋转坐标系状态方程(9)中。最终可以求得磁链开环转差型矢量控制在同步旋转坐标系下的状态量如下:
转子磁链为
(11)
转差角频率为
(12)
磁链位置的估算:
(13)
等幅值变换下的电磁转矩为
(14)
式中:isd,isq,ird,irq分别为定子和转子电流的励磁和转矩分量;usd,usq,urd,urq分别为定子和转子电压在同步旋转坐标系d,q轴上的分量;ψsd,ψsq,ψrd,ψrq分别为定子和转子磁链在d,q轴上的分量;Rs和Rr分别为定子和转子电阻;ψr为转子磁链;Ls和Lr分别为定子和转子两相绕组自感;Lm为定子与转子同轴等效绕组间的互感;Te为电磁转矩;TL为负载转矩;J为转动惯量;np为极对数;σ为漏磁系数;Tr为转子电磁时间常数;p为微分算子;θ为磁链位置角度;ωs为转差角频率。
根据推导出的磁链和转矩公式(11)、公式(14)可知,磁链开环转差型矢量控制在同步旋转坐标系下可以实现励磁和转矩的解耦控制,转子磁链ψr稳态运行时只受等效励磁电流id的影响。只要能够保证磁链的稳定,通过调节等效转矩电流iq就能够有效地调节ACIM电机的输出转矩,实现稳定的矢量调速控制。
由式(14)简化的最终形式可知,转矩在励磁电流id稳定的前提下取决于电机的转差频率。在运行状态发生突变的动态过程中,如电机的启动过程,因为电机中出现了暂态电流,其阻碍了运行状态的突变,因此电机的转矩出现了偏差,响应出现迟滞。为了解决这一问题,可以先保证电机定子磁场、转子磁场或者气隙磁场中有的一个始终保持不变。这样电机的输出转矩即使在启动过程中也会和稳态运行时一样,主要由转差决定。根据这一转换思想,磁链开环转差型矢量控制以定子电流的幅值、相位和频率为控制量,保持电机的旋转磁场大小不变,而改变磁场的旋转速度,这样便可得到无延时的转矩响应。此种控制策略可以在接近零速的系统中稳定运行,转矩响应快,系统动态过程短[8]。因此,该控制方法可以作为ACIM启动控制策略开发的软件平台。
1.2 矢量控制励磁改进方案的提出
采用磁链开环转差型矢量控制策略启动电机时,电机启动瞬间,磁场定向通常是不准确的。因此,在相同幅值的启动电流下电机不能够以最快的响应达到最优的转矩迅速启动电机。针对这一问题,在电机启动时,可以保持旋转磁场的大小不变,即保持励磁电流分量为定值(电机运行状态进入弱磁之前)。启动瞬间,转子转速为0,转差率达到最大,此时,可以将电机的启动过程看作给定了峰值转矩,并由PID进行闭环调节的控制结构。此种状态下,即便初始磁链定向不准确,由于PID的调节作用,电机也会迅速达到其峰值转矩。转速提升的过程中,磁链估算逐渐准确,转矩的动态响应也进一步加快。尽管如此,PID调节的过程虽然短暂,但是并不等同于电机瞬间输出最大转矩。因此,实际启动效果仍需搭建台架试验平台进一步验证。同时,启动大电流问题始终无法避免,会对电机所在电网造成冲击,影响电网中其他电气设备的正常工作[9]。针对这一问题,很多研发人员提出降压处理的方法。
根据ACIM的T形等效电路计算电磁转矩为
(15)

转差率s=1时所对应的转矩为启动转矩,用Tst表示。它可以反应电机的启动能力。将s=1代入式(15)得:
由式(16)可知,电机转子电阻不变时,启动转矩与定子相电压的平方成正比。如果为了降低启动电流而采取降压处理,启动转矩将会大幅度降低,进而影响ACIM带载启动性能。因此,ACIM作为电动汽车的驱动电机而言,通过降压启动来降低启动电流的方法是不可取的,这样会直接影响到电动汽车的动力性。
对此,笔者提出对磁链开环转差型矢量控制策略的改进方案。对于ACIM而言,启动过程包括建立磁场和输出转矩两部分[10]。鼠笼式电机要求磁通、转矩快速达到稳态,而转速输出相对慢一些。根据ACIM电磁转矩方程(14)可知,磁通为自变量,转矩为因变量。因此,在启动时,可以调节磁通使其幅值在最短的时间内达到参考值,再输出转矩。矢量控制已经实现了励磁和转矩的解耦控制。从控制启动电流的角度,将磁场的建立和转矩的提升分阶段来完成,可以避免励磁电流分量和转矩电流分量同时出现峰值。以此种控制策略启动电机,只要能够限制励磁电流,就可以有效地控制系统启动电流的大小。从控制启动转矩的角度,磁链稳定后立即输出转矩,转矩可近似无延时响应,电机能够瞬间输出最大转矩克服负载启动电机。车用驱动电机启动性能的提升同样是电动汽车动力性增强的体现。
2 ACIM启动SIMULINK仿真
2.1 励磁改进前后矢量控制SIMULINK建模
根据坐标变换逻辑,推导出的同步旋转坐标系下转子磁链、转差角频率、磁链位置、电磁转矩公式(11)~公式(14)以及电压空间矢量脉宽调制逻辑,建立磁链开环转差型矢量控制仿真模型,如图3。

图3 ACIM按转子磁链开环转差型矢量控制仿真模型Fig.3 Simulation model of ACIM flux open loop slip vector control
针对ACIM启动问题,对图3中的仿真模型作出改进。增加磁链幅值判断模块,判断磁链幅值是否到达给定值并保持稳定。为了防止启动后运行状态进入弱磁区域,不符合启动时的磁链幅值判断逻辑,可加上转速判断模块。当转速达到100 r/min,切换至稳态运行模式,不再延用励磁改进后的启动限流控制策略。改进模型如图4。仿真时的电机性能参数设置如表1。

表1 ACIM启动仿真性能参数
仿真时给定励磁电流id=12 A;转速s=800 r/min;母线电压Ud=520 A;SVPWM更新周期T=0.1ms;启动负载均设为60 N·m。将给定励磁电流分量、给定转速、电机性能参数代入等幅值变换下的电磁转矩公式(14)中,可以求得仿真时,启动的峰值转矩为141.92 N·m。
2.2 励磁改进前后ACIM启动仿真结果对比及分析
对改进前后的磁链开环转差型矢量控制模型进行仿真,得出改进前仿真结果如图5~图6,改进后如图7~图8。

图5 按转子磁链开环转差型矢量控制启动转矩响应Fig.5 Response of starting torque for flux open loop slip vector control

图6 按转子磁链开环转差型矢量控制启动单相电流响应Fig.6 Single phase current response in the start for flux open loop slip vector control
通过对改进前后模型的仿真结果对比可知,同样的启动负载下启动电机,改进前的矢量模型,电机的输出转矩存在一个由小到大逐渐提升的过程。该过程持续0.3 s的仿真时间,如图5。电机带载启动的情况下,这样的转矩响应很难使电机以足够的转矩启动,电机往往会出现长时间抖动甚至堵转的现象,并长时间维持峰值电流,加大绕阻损耗,严重情况会出现电机瞬间发热烧毁线圈的现象。图6即为此种状态下电机的单相电流波形,启动初期电流幅值迅速达到峰值,并且抖动频率较高。
改进后的矢量模型,电机在磁链达到稳态值之前输出转矩一直为0 N·m,判定磁链稳定后,仿真时间在0.2 s处,输出转矩直接由0 N·m迅速提升至峰值转矩,如图7。该转矩的提升时间比改进前依靠PID调节提升扭矩的过程更短,克服启动负载提升转速的效果更加明显。图8为励磁改进后电机的单相电流波形,与图7中对应,仿真时间在0.2 s之前。根据磁链判断逻辑,磁链幅值未达到稳态值,通过限制转矩电流分量来限制转矩的输出。因此启动仿真时,在0~0.2 s电流幅值很小并且波形稳定。相对于改进前的仿真效果而言,启动电流得到了很明显的抑制。

图7 励磁改进后转差型矢量控制启动转矩响应Fig.7 Response of starting torque for field improved slip vector control

图8 励磁改进后转差型矢量控制启动单相电流响应Fig.8 Single phase current response in the start for field improved slip vector control
3 基于DSP的ACIM的启动实验
3.1 ACIM励磁改进后矢量控制策略嵌入式代码生成模型的建立和自动代码的生成
根据改进后的矢量控制策略,建立ACIM励磁改进型矢量控制嵌入式自动代码生成模型[11],如图9。
建模完成之后,采用RTW工具箱使SIMULINK模型生成针对TI公司C28x系列DSP的C代码[12-14]。由于控制器逆变器部分采用MOSFET功率管,其开关频率为20 kHz,因此,程序中执行中断的频率不可高于该频率。将执行步长设置为0.000 05,即执行周期为50 μs。根据主控芯片类型设置硬件平台为Texas Instrument C2000。对RTW进行配置时,选择ert.tlc作为目标文件,这样所生成的代码紧凑、高效,占用的内存较少。勾选Report选项,生成代码报告,以方便后期的检查。完成配置后,单击build按钮,生成相应的控制代码。

图9 ACIM励磁改进型矢量控制自动代码生成模型Fig.9 Automatic code generation model of ACIM field improved vector control
将自动生成的上层控制代码和手工编写TMS320F28335底层驱动程序在开发环境Code Composer Studio中进行集成,并编译、烧写和运行,结合硬件平台进行调试。
3.2 实验平台的搭建及数据处理
完成ACIM励磁改进型矢量控制嵌入式自动代码生成之后,将集成好的工程控制代码烧写到以车用级TMS320F28335芯片为核心的电动车用电机控制器中。对ACIM励磁改进前后的矢量控制系统进行启动实验分析。
实验平台搭建装置主要包括:交流感应电机、测功机、功率电源、上位机、开发环境主机、基于TMS320F28335核心控制板的MOSFET型电机控制器等。试验平台如图10。

图10 ACIM启动实验调试平台Fig.10 Debugging platform of ACIM starting experiment
采用ACIM铭牌参数如表2。

表2 ACIM铭牌参数
采用Code Composer Studio开发环境的数据导出功能,将励磁改进后ACIM矢量控制系统启动转矩和励磁直轴电流id响应实验数据导出(由于改进前的矢量控制系统在启动瞬间输出转矩过小,电机发热并出现剧烈抖动,功率电源长时间维持大电流输出。为防止烧坏电机线圈,数据不方便采集,因此,此处只采集励磁改进后矢量控制实验的数据),运用MATLAB数据导入功能将数据导入并作出相应Plot图形,如图11~图12。

图11 励磁改进后转差型矢量控制启动实验转矩响应Fig.11 Response of torque in the starting experiment for field improved slip vector control
图11为励磁改进后ACIM矢量控制启动转矩响应。本次实验只为初步验证改进后矢量控制系统的带载启动能力,因此根据式(14)通过给定合适的励磁电流和转速,将启动时的峰值转矩设为22 N·m,测功机施加负载转矩只设为2.5 N·m。电机启动时,磁链达到稳态值之前转矩输出近似为0 N·m,磁链稳定之后电机瞬间输出峰值转矩,并出现超调现象,转矩上升达到25 N·m,克服启动负载迅速并平稳地启动电机。该实验结果同样验证了励磁改进型矢量控制仿真结果的正确性,达到了磁链改进策略对启动转矩输出的预期效果。图12为ACIM励磁改进型矢量控制直轴励磁电流id给定值为0.2(本矢量控制系统为标幺化系统,此处为标幺值)时的响应曲线。电机启动瞬间,限制转矩电流分量输出为0 A,对直轴励磁电流id实现有效控制,其响应迅速、稳定、无超调、稳态误差小,功率电源在电机启动瞬间输出电流小。该实验结果达到了励磁改进策略对启动大电流有效抑制的预期效果。

图12 励磁改进后转差型矢量控制启动实验直轴电流响应Fig.12 Response of direct axis current in the starting experiment for field improved slip vector control
4 结 语
针对电动车用ACIM启动问题,从ACIM控制策略的角度考虑,提出了一种励磁改进型矢量控制的新方法。以ACIM矢量控制和电磁转矩数学模型推导和分析为基础,结合ACIM励磁改进前后启动控制的仿真和实验进行对比分析,采用励磁改进后的矢量控制策略启动电机,启动转矩大并且响应迅速,启动电流小,启动时间短。该方法满足新能源电动汽车对驱动电机启动性能的要求,为新能源电动汽车驱动电机启动控制策略的进一步研究与开发提供了理论参考。
[1] ROMODIN A V, KUZNETSOV M I. A way to start an induction motor during a change in the voltage phase on one of two stator windings[J].RussianElectricalEngineering, 2015, 86(6): 339-343.
[2] SUNDARESWARAN K, SRINIVASA R N. Design of feedback controller for soft-starting induction motor drive system using genetic algorithm[J].InternationalJournalofIndustrialElectronicsandDrives, 2014, 1(2): 111-120.
[3] 张誉腾. 基于 PLC 的鼠笼型异步电动机串电阻降压启动控制的应用[J].电子技术与软件工程, 2015, 1(15): 171-172.
ZHANG Yuteng. Series resistance step-down starting control applications of squirrel-cage asynchronous motor based on PLC[J].ElectronicTechnology&SoftwareEngineering, 2015, 1(15): 171-172.
[4] 周琛. 异步电机重载软启动技术[D].哈尔滨: 哈尔滨工业大学,2012: 7-19. ZHOU Chen.Soft-StartingTechnologiesofAsynchronousMotorSuitableforHeavyLoad[D]. Harbin: Harbin Institute of Technology, 2012: 7-19.
[5] OKAZAKI Y, HAGIWARA M, AKAGI H. A speed-sensorless start-up method of an induction motor driven by a modular multilevel cascade Inverter (MMCI-DSCC)[J].IEEETransactionsonIndustryApplications, 2014, 50(4): 2671-2680.
[6] 张恒. 直接转矩控制异步电动机启动方法的研究[D].辽宁: 辽宁工程技术大学, 2004: 21-26. ZHANG Heng.TheResearchaboutStartupControlStrategyofInductionMotortoDirectTorqueControl[D]. Liaoning: Liaoning Technical University, 2004: 21-26.
[7] 马锐权. 转矩控制软启动器的研究及应用[D].广州: 华南理工大学,2013: 5-16. MA Ruiquan.StudyandApplicationofTorqueControlSoftStarter[D]. Guangzhou: South China University of Technology, 2013: 5-16.
[8] 李永东. 交流电机数字控制系统[M].北京:机械工业出版社, 2012: 127-130. LI Yongdong.ACMotorDigitalControlSystem[M]. Beijing: China Machine Press, 2012: 127-130.
[9] 王和秀,孙雨萍. 电机学[M].北京:机械工业出版社,2009: 169-172. WANG Hexiu, SUN Yuping.Electromechanics[M]. Beijing: China Machine Press,2009: 169-172.
[10] 胡斯登,赵争鸣. 基于磁链控制的异步电机V/F控制系统直流预励磁启动方法[J].电工技术学报, 2012, 27(7): 118-123. HU Sideng, ZHAO Zhengming. DC pre-excitation start strategy based on the flux control for V/F controlled induction motor drive system[J].TransactionsofChinaElectrotechnicalSociety, 2012, 27(7): 118-123.
[11] 任志斌. 电动机的DSP控制技术与实践[M].北京: 中国电力出版社, 2012: 74-88, 149-152. REN Zhibin.DSPControlTechnologyandPracticeofMotor[M]. Beijing: China Electric Power Press, 2012: 74-88, 149-152.
[12] MISHRA A, MAKWANA J, AGARWAL P, et al. modeling and implementation of vector control for PM synchronous motor drive [C]//InternationalConferenceonAdvancesinlEngineering,ScienceandManagement,2012: 582-585.
[13] 邱宝梅,左文英,王凤娟. 基于Simulink/RTW的汽车电子控制系统的研究[J].计算机测量与控制, 2011,19(5): 1086-1088. QIU Baomei,ZUO Wenying,WANG Feng juan. Research of automotive electronic control system based on Simulink/RTW[J].ComputerMeasurementandControl, 2011,19(5): 1086-1088.
[14] 齐振恒,孙中杰,李涛. RTW嵌入式代码自动生成机制与代码结构分析[J].计算机测量与控制,2010,18(3): 639- 642. QI Zhenheng, SUN Zhongjie, LI Tao. RTW embedded code auto generation mechanism and code structure analysis[J].ComputerMeasurementandControl,2010,18(3): 639- 642.
(责任编辑 朱汉容)
Study on AC Induction Motor for Vehicles Start ControlBased on Field Improved Vector Control
LI Junwei,CAI Liangsheng,GAO Song
(School of Transportation & Vehicle Engineering,Shandong University of Technology, Zibo 255049, Shandong,P.R.China)
In order to solve the problem of the AC Induction Motors(ACIM)for electric vehicles started with a large current and a small torque, a new method of field improved vector control was proposed to solve the startup problem from the viewpoint of ACIM control strategies. Both of the original and the improved model for ACIM ware established in Matlab/Simulink environment,including the rotor indirect field oriented vector control simulation and embedded automatic code generation model. Simulation debugging was carried out firstly, and then C code which was for TI Company C28x series DSP was generated, the bottom hardware driver of TMS320F28335 was written manually, integration of the upper control algorithm and the underlying drive was completed in the development environment of Code Composer Studio. Test of startup was conducted by loading consolidated control code into the motor controller which considered TMS320F28335 as its core. The original and the improved control strategy ware compared by simulation and experiment. Simulation and experimental results show that: using the method of field improved vector control, it enables ACIM to reduce the starting current and increase starting torque rapidly during period of startup. Compared with traditional conventional methods, more cost can be saved more and efficiency can be improved by the new method which improves both the boot device and the hardware structure .
electromechanical engineering; AC induction motors; startup mode; vector control; software simulation
10.3969/j.issn.1674-0696.2017.02.20
2015-12-29;
2016-03-15
山东省自然科学基金(面上项目)(ZR2015EM054);山东省重点研发计划项目(2015GGX105009)
李军伟(1964—),男,河南平顶山人,教授,博士,主要研究方向:汽车电子与电动汽车驱动技术。E-mail:ljwhitt@163.com。
蔡良生(1991—),男,江苏盐城人,硕士研究生,主要研究方向:汽车电气与电动车技术。E-mail:15152350579@163.com。
TM343
A
1674-0696(2017)02- 115- 08
猜你喜欢
大电机技术(2022年3期)2022-08-06
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
河北电力技术(2021年2期)2021-07-29
电子制作(2018年1期)2018-04-04
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年10期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年17期)2014-04-04