无速度传感器式直线伺服系统及其应用
2017-03-02 03:17:23王双中陈德传郑忠杰王新琛
杭州电子科技大学学报(自然科学版) 2017年1期
王双中,陈德传,郑忠杰,王新琛
(1.杭州电子科技大学自动化学院,浙江 杭州 310018;2.深圳市大疆创新科技有限公司,广东 深圳 518000)
无速度传感器式直线伺服系统及其应用
王双中1,陈德传1,郑忠杰2,王新琛1
(1.杭州电子科技大学自动化学院,浙江 杭州 310018;2.深圳市大疆创新科技有限公司,广东 深圳 518000)
提出一种基于新型反电势扩展滑模观测器的直线速度软检测方法.以电流微分方程和反电势微分方程为观测模型,采用开关控制律,以实际电流和观测电流之间的误差为切换函数,反电势观测结果由一系列开关脉冲通过积分得到连续正弦信号,可直接用于速度的软检测.实验表明,PMLSM直线伺服系统可在其额定最大速度的10%以上实现无光栅尺的闭环控制运行,满足纠偏控制系统对执行速度的控制要求,在实际试用中达到预期目标.
反电势扩展滑模观测器;永磁同步直线电机;速度软检测;无光栅尺闭环运行
0 引 言
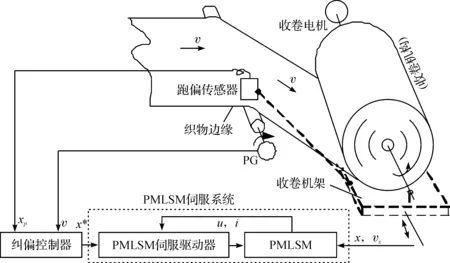
图1 基于PMLSM速度软检测的带材收卷纠偏控制系统组成原理框图
带材在卷绕过程中要求带材居中无偏、稳定地沿卷绕方向运动.尽管采取了多种抑制跑偏的措施但跑偏现象仍不可避免,若不及时进行纠偏,将引起带材边缘不齐整等缺陷进而影响产品质量,甚至无法生产[1].永磁同步直线电机(Permanent Magnet Linear Synchronous Motor,PMLSM)可直接驱动直线运动负载,应用于高速高精度的工业场合.纠偏控制系统对速度的绝对精度要求不太高[2],可采用基于速度软检测的无光栅尺闭环控制.适用于中、高速的速度软检测方法主要有两类:一类是基于电机理想模型的开环计算方法,如反电势积分法,其计算过程简单,但易受参数不确定性影响[3];另一类是基于各种观测器模型的闭环算法,如扩展卡尔曼滤波法能有效抑制测量噪声影响,但计算量大[4];滑模观测器法因受参数和干扰变化影响小,具有鲁棒性强及动态响应快的特点[5-7],相关应用较多.本文设计了一种新型反电势扩展滑模观测器,得到的反电势观测值为连续正弦信号,可直接用于速度软检测,避免了传统滑模观测器的相位滞后问题.
1 新型纠偏系统的组成
基于PMLSM速度软检测的带材收卷纠偏控制系统组成原理如图1所示,包括带材收卷机构、跑偏量传感器、纠偏控制器、PMLSM直线伺服系统等.PMLSM直线伺服系统的作用是接收纠偏控制器发过来的纠偏信号,由PMLSM驱使带材的导向机构运动以完成纠偏控制.新型纠偏系统要求伺服执行系统具备动态响应快、稳定性好、可靠性高、易维护等特点.
2 PMLSM伺服系统的设计
2.1 基于速度观测控制的PMLSM伺服系统组成原理

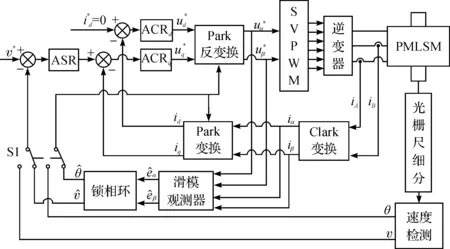
图2 PMLSM速度软测控系统原理框图
2.2PMLSM建模与直线速度观测器设计
对于表面磁极型的PMLSM,可忽略凸极效应,电机在αβ坐标系下的电流状态方程为:

(1)

(2)
(3)
ω相对于电变量变化慢得多,在一个采样周期中可认为ω基本不变,对eα,eβ求导,得到:
(4)
以动子电流、反电势为状态变量,根据式(1)构建反电势扩展滑模观测器,得到:

(5)

(6)

(7)


(8)
可以看出,若要满足滑模可达条件dV1/dt<0,实现电流观测值收敛于真值,只需保证:K1>max{|s2α/Ls||s2β/Ls|}.当电流观测值收敛到真值后,s1α≈0,s1β≈0,ds1α/dt≈0,ds1β/dt≈0,则由式(7)可得反电势观测值误差如下:
(9)

(10)


(11)
可以看出,若要满足滑模可达条件dV2/dt<0,实现反电势观测值收敛于真值,只需保证:K2<0.
实际应用中,K1,K2的取值需权衡快速性和抗干扰性.而反电势观测值由开关脉冲积分所得,是连续的正弦信号,可直接用于位置和速度的计算,避免了传统滑模观测器的相位滞后问题.


(12)

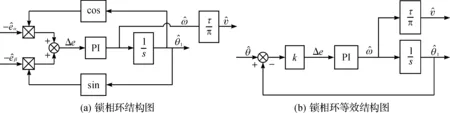
图3 基于锁相环的速度观测器结构图
在速度给定v*=±0.5 m/s的往复运动时,PMLSM速度软测控系统仿真结果如图4所示.
2.3 调节器设计
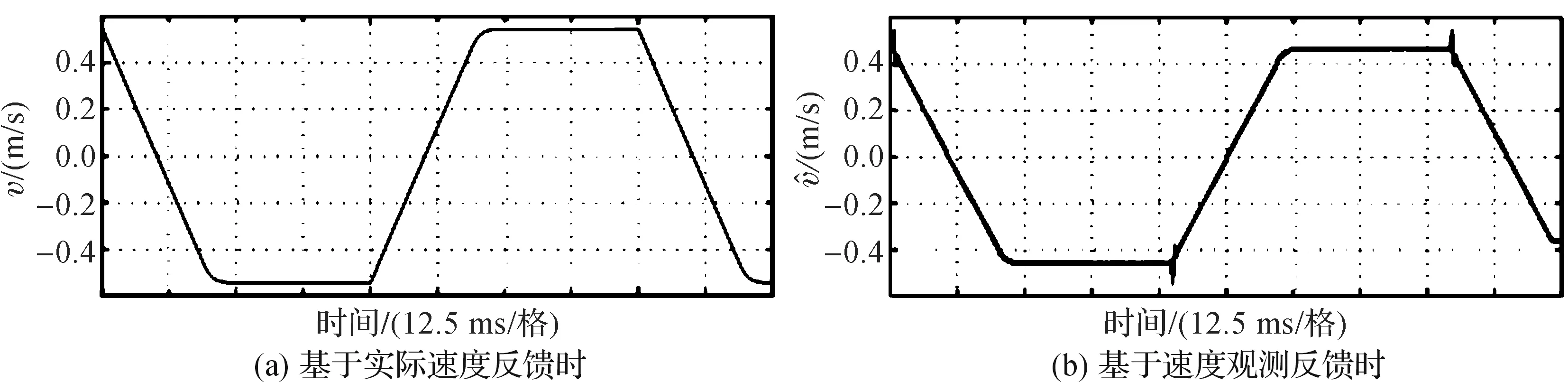
图4 给定速度为±0.5 m/s时,往复运动速度响应仿真
(13)
式中:kc=Lq/(2τp),τc=Lq/R,τp分别为电流调节器的比例系数(V/A)、积分时间常数(s)、SVPWM调制技术的开关周期(s),Lq,R为q轴电感(mH)、绕组电阻(Ω).
电流环作为速度环的内环,按典I系统设计后,在进行速度调节器ASR的参数整定时,可将其近似为一阶惯性环节1/(τls+1),其中τl=2τp.转速环控制器整定如下:
(14)
式中:ks=τM(h+1)/(3hπφfτl),τs=hτl分别为速度调节器的比例系数(A(m/s)-1)、积分时间常数(s),h为中频段宽度,一般取h=5,τ为PMLSM极距(mm),φf为定子永磁体磁链(Wb).
3 纠偏控制器设计
根据图1的带材收卷纠偏控制系统框图,建立其数学模型如图5(a).xp为带料边缘跑偏量(m),y为在跑偏传感器的带材边缘综合跑偏量(m),E为收卷处的跑偏量(m);x*为纠偏控制器输出的电机动子位移指令(m);x,vx为电机动子位移(m)与速度(m/s);Wrc(s),Wd(s),Wp(s)分别为纠偏控制器、PMLSM软检测控制系统、跑偏传输通道的传递函数:
(15)
(16)
(17)
(18)
式中:Te=0.529τM/(6πφf),V为带材运行速度(m/s),L为检测点到收卷点的有效长度(m).
带材在收卷过程中的蛇形跑偏,可以近似为正弦式运动,为了克服带材的正弦式跑偏现象,提高纠偏控制系统的动、静态性能,在PI纠偏的基础上增加重复控制,构成新型纠偏控制算法,以实现对正弦式跑偏的跟踪控制.Wrc(s)中F(s)是低通滤波器,用于消除系统中的高频干扰,e-Ls为延时环节,取延时时间L等于偏差信号的基波周期(s),并取:C(s)=kxp(τis+1)/τis.

在进行C(s)参数整定时可暂不考虑重复控制器,利用工程近似处理方法将Wd(s)等效成一个一阶环节如式(16),进而按典型Ⅰ型系统作为期望模型进行设计,可得τi=Te,kxp=Te/Txp.
当跑偏量xp=0.01sin(10πt)(m)时,收卷处跑偏量E的波形如图5(b)所示.仿真结果显示,收卷处跑偏量E的稳态误差在±0.010 mm范围,满足收卷系统的精度要求.为实际纠偏应用提供了可靠的理论依据.

图5 纠偏控制系统数学模型与仿真图
4 实验与应用分析
纠偏控制系统实验平台如图6(a)所示.实验平台的跑偏量需手动旋转旋钮控制,故本次实验只验证电机控制方案的可行性.系统在车速为600 m/min的高速薄膜分切机中试用,定位精度可达±0.1 mm,满足生产要求,试用现场如图6(b)所示.PMLSM的具体参数为:Rs=1.6 Ω,Ls=6.9 mH,φf=0.014 Wb,τ=1.037 5×10-3m,最大速度0.83 m/s,最大推力100 N,有效行程0.1 m.

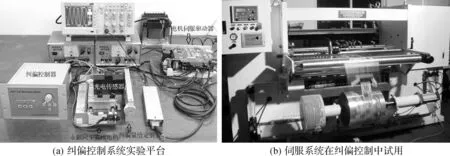
图6 纠偏控制系统及应用图
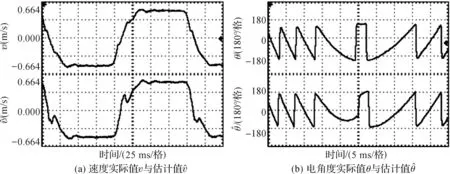
图7 实验相关波形
5 结束语
本文提出的基于反电势扩展滑模观测器算法的无速度传感器式直线伺服系统可在PMLSM额定速度的10%以上实现精确速度控制,特别适用于外环带有特定物理量传感器进行闭环控制的应用场合,如带材纠偏控制系统等,实际应用也表明了本文方案的可行性.若进一步与高频注入法等进行融合应用,可望在全速范围内实现对直线电机速度的软检测,以进一步拓展相关应用.
[1]杨开平,史耀耀,何晓东,等.复合材料布带缠绕智能纠偏控制技术[J].航空学报,2011,32(7):1317-1325.
[2]张培娟.对带材收卷过程中正弦式跑偏的跟踪控制[D].杭州:杭州电子科技大学,2013.
[3]王利,卢琴芬,叶云岳.永磁直线同步电机无位置传感器动子位置辨识[J].电机与控制学报,2012,16(6):7-12.
[4]MBOUSSA.ImplementationandExperimentalInvestigationofSensorlessSpeedControlwithInitialRotorPositionEstimationforInteriorPermanentMagnetSynchronousMotorDrive[J].PowerElectronics,IEEETransactionson,2005, 20(6):1413-1422.
[5]LEEH,LEEJ.DesignofIterativeSlidingModeObserverforSensorlessPMSMControl[J].ControlSystemsTechnology,IEEETransactionson, 2013, 21(4):1394-1399.
[6]KIMH,SONJ,LEEJ.AHigh-SpeedSliding-ModeObserverfortheSensorlessSpeedControlofaPMSM[J].IndustrialElectronics,IEEETransactionson, 2011, 58(9):4069-4077.
[7]陆婋泉,林鹤云,韩俊林.永磁同步电机的扰动观测器无位置传感器控制[J].中国电机工程学报,2016,36(5):1387-1394.
[8]王悍枭,刘凌,吴华伟.改进型滑模观测器的永磁同步电机无传感器控制策略[J].西安交通大学学报,2016,50(6):104-108.
[9]杨娅君.运动带材边、线跑偏的智能控制[J].基础自动化,2000,7(3):4-5.
[10]张国强,王高林,徐殿国,等.基于自适应陷波滤波器的内置式永磁电机转子位置观测方法[J].中国电机工程学报,2016,36(9):2521-2527.
Sensorless Linear Servo System and Its Application
WANG Shuangzhong1, CHEN Dechuan1, ZHENG Zhongjie2, WANG Xinchen1
(1.SchoolofAutomation,HangzhouDianziUniversity,HangzhouZhejiang310018,China; 2.SZDJITechnologyCompanyLimited,ShenzhenGuangdong518000,China)
A velocity soft detection method, which is based on novel back-EMF extended sliding observer for PMLSM is proposed. The novel observer takes the current and back-EMF differential equations as an observation model. The errors between actual and observed current are taken as the switching function. The observational result of back-EMF is obtained by the integrating of a series switch pulses and the result is a continuous sinusoidal variable. It can be directly used to estimate the velocity. The experimental results show that the PMLSM servo system can well operate without grating sensor when the velocity is faster than 10% of its rated maximum, and meeting the requirements of the running speed. The rectification control system can satisfy with the expected goal when it is used in an actual trial.
back-EMF extended sliding mode observer; permanent magnet linear synchronous motor; velocity soft detection; operate without grating sensor
10.13954/j.cnki.hdu.2017.01.014
2016-06-12
国家自然科学基金资助项目(U1509203)
王双中(1990-),男,江苏兴化人,硕士研究生,直线电机控制与应用.通信作者:陈德传教授,E-mail:chendechuan@hdu.edu.cn.
TP273
A
1001-9146(2017)01-0062-06
猜你喜欢
信息记录材料(2023年10期)2023-12-04 14:18:22
中国钢铁业(2022年8期)2022-12-21 06:44:10
中国钢铁业(2022年7期)2022-12-21 06:09:58
中国钢铁业(2022年6期)2022-09-03 00:50:58
中国钢铁业(2022年4期)2022-07-06 08:54:34
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
橡塑技术与装备(2021年12期)2021-06-24 09:30:36
文化产业(2019年6期)2019-09-11 03:05:22
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11