序贯贝叶斯滤波估计模函数和水平波数
2017-03-02 03:46:16程泽丰
杭州电子科技大学学报(自然科学版) 2017年1期
程泽丰,潘 翔
(浙江大学信息与电子工程学院,浙江 杭州 310027)
序贯贝叶斯滤波估计模函数和水平波数
程泽丰,潘 翔
(浙江大学信息与电子工程学院,浙江 杭州 310027)
介绍了一种在浅海波导环境中,联合声场模型和测量场,利用模基信号处理器解决非线性状态-参数估计问题的方法.在分析简正波模型表征声场的基础上,侧重研究了扩展卡尔曼滤波和粒子滤波两种算法,并将其用于模基水声信号处理进行声场参数估计.理论分析和数值仿真表明,两种算法均能正确估计模函数和水平波数,同时粒子滤波处理具有更好的宽容性.
序贯贝叶斯;粒子滤波;模基处理;水声波导
0 引 言
浅海环境是一个时变和空变的波导环境,水声信号在其传播表现为时延扩展和多普勒扩展.在波导环境中,通常用简正波模型来表征声场,用匹配场处理进行声源定位[1].由于理论模型和实际声场存在失配,宽容的匹配场处理成为研究的热点.
基于空间-状态模型的序贯贝叶斯滤波[2]适合在不确定的、非平稳和非高斯的变化环境中进行信号分析和处理,可以为模函数和水平波数的跟踪以及环境参数的反演提供有力工具.本文依据实际测量的声压场和声速剖面,基于简正模式传播模型,通过序贯贝叶斯滤波算法发展而来的基于扩展卡尔曼滤波[3](Extended Kalman Filtering, EKF)和粒子滤波(Particle Filtering, PF)的模基处理器,估计对应的模函数和水平波数.
1 空间-状态模型
运用序贯贝叶斯滤波处理海洋声信号增强问题,首先需要建立空间-状态模型.假设水平分层的海洋深度为h,已知声源水平距离rs和深度zs.由点声源发出的声能量用亥姆霍兹方程建模,经过标准的变量分离方法,获得只与深度相关的波方程表示方法

(1)
式中,本征解{Φm(z)}即所谓的模函数,κz为z方向上的垂直波数.同时对应的色散关系为

(2)
将只含深度参量的本征方程转化为状态-空间形式,将第m模式定义为
(3)
将噪声用加性噪声表示,并将确定的状态方程扩展为M个模式Φ(z)=[Φ1(z)|…|ΦM(z)]T以此导出模型的2M维的高斯-马尔可夫表示下的状态和测量方程

p(rs,z)=CT(rs,zs)Φ(z)+v(z),
(4)

由于阵列在空间上以深度离散采样声压场,可以通过离散化微分方程来提高数值稳定性.假设传感器均匀分布,以zl表示第l个传感器所在的位置,得到

(5)
其中Δzl=zl+1-zl,将该近似方法代入式(1),得到
Φm(zl)-2Φm(zl-1)+Φm(zl-2)+Δzl2κz2(m)Φm(zl-1)=0
将离散模态状态向量定义为Φm(zl)=[Φm(zl-2)|Φm(zl-1)]T,得到关于第m模式的一组差分方程.最后结合所有可能的模式,对简正模状态方程和测量方程的整体高斯-马尔可夫表示为
Φ(zl)=A(zl)Φ(zl-1)+ω(zl),
p(rs,zl)=CT(rs,zs)Φ(zl)+v(zl).
(6)
2 模基处理器
2.1 扩展卡尔曼滤波(EKF)
利用有限差分方法来离散化状态方程,导出第一节中所建立模型的离散形式
Φ(zl+1)=[I+ΔzA(zl)]Φ(zl)+Δzω(zl).
(7)
确立了高斯-马尔可夫模型,对状态向量Φ确定其递归(卡尔曼)估计器

(8)
其中,AΦ(zl)=[I+ΔzA(zl)],这种一般化表示方法,能够反映整个过程的递归本质.


(9)
增益:卡尔曼增益由下式给出

(10)


因此,在经过增强的高斯-马尔可夫模型中,非线性的测量方程可以写作
(11)
其中的c[·]的并非声速剖面c(z).需要得到增强的状态向量和相对应的测量中所有元素的一阶导数,构成整个系统的雅克比矩阵.
2.2 粒子滤波(PF)
扩展的卡尔曼滤波器基于泰勒级数的一阶展开,将非线性问题近似为线性问题.相比之下,粒子滤波则更加适合处理非线性问题.


(12)
(13)
对应的状态和测量方程分别为
Φi(zl,Θ)=A(zl-1)Φi(zl-1)+ωi(zl-1),
p(rs,zl)=c[Φi(zl-1;Θ)]+v(zl).
(14)
3 仿真分析
3.1 仿真参数设置
图1详细给出了仿真环境参数的设定.图1左侧串状圆圈为接收阵,阵列的布放从水面以下深度10 m处开始,间隔Δzl=2.5 m设置阵元,一共有N=71个阵元,最后一个阵元放置在深度为185 m处的位置.图1中右侧标志为声源所在位置,离接收阵水平距离rs为0.5 km,深度zs为90 m,与垂直阵列中心位置等深,声源发出声信号的频率为50 Hz.将图1所示环境参数输入到简正模计算软件Kraken[4]中,所需要的垂直声速剖面如图2左图所示,计算获得的声压场如图2右图所示.
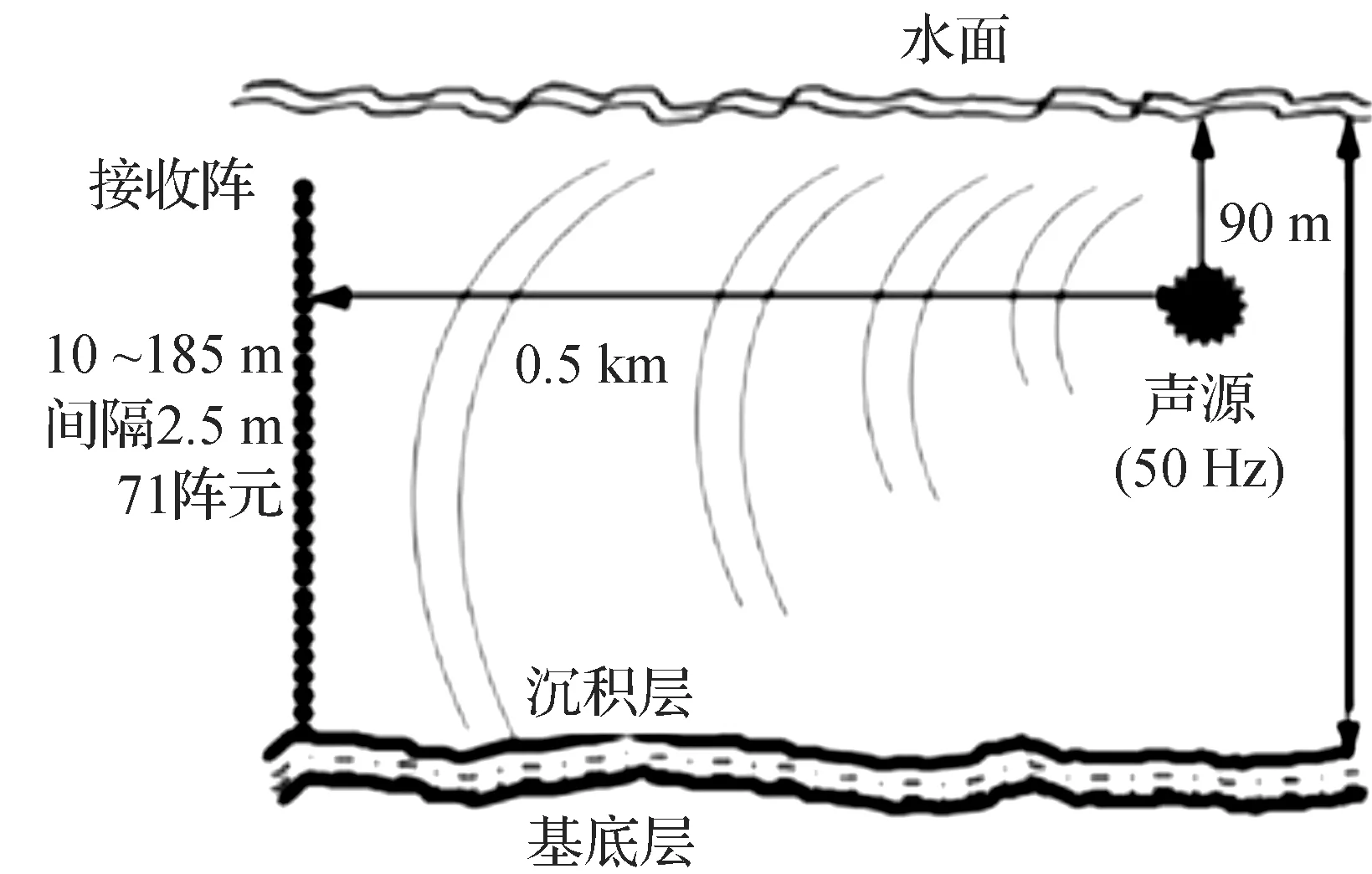
图1 仿真参数设置

图2 垂直声速剖面和声压场
图3给出了Kraken计算的结果,从左至右分别为1至8号模.
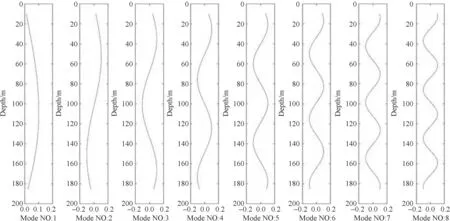
图3 Kraken计算得到的1至8号模
3.2 结果分析
通过Kraken计算,得到8个模式.图4给出分别利用EKF和PF模基处理器对第5号模模函数和水平波数的估计结果.图4(c)、图4(d)横轴表示水平波数,单位为m-1.
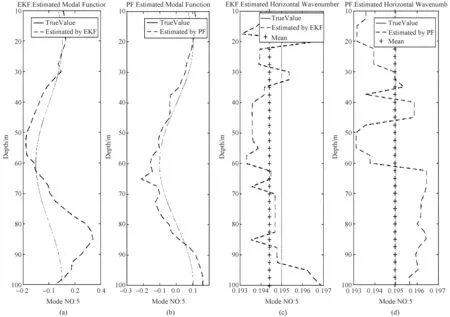
(a) EKF模基处理器估计模函数; (b)PF模基处理器估计模函数;(c) EKF模基处理器估计水平波数; (d)PF模基处理器估计水平波数图4 EKF和PF模基处理器估计结果
图4中,实线表示为真值,图4(a)中虚线表示EKF模基处理器对模函数的估计,图4(b)中虚线表示PF对模函数的估计结果.图4(c)和(d)中“+”号线分别为EKF和PF模基处理器对第5号模对应的水平波数的估计值.对第5号模而言,基于PF的模基处理器对模函数和水平波数的估计结果均优于基于EKF模基处理器,且MMSE在10-4数量级.分析其他模式,也存在类似的结论.表明了基于PF的模基处理器良好的宽容性.
4 结束语
在获得声速剖面和声压场数据的前提下,本文研究了表征声场的模函数和水平波数的估计问题.利用扩展的卡尔曼滤波器(EKF)和粒子滤波器(PF)构建了模基处理器,结合测量声压场和声速剖面联合估计模函数和水平波数.结果表明EKF算法在该问题上存在一定的局限性.而PF模基处理器,在设定的条件下,能够较为精确地估计模函数和水平波数,但其算法实时性远劣于前者.在今后的研究中,需要进一步检验PF模基处理器的宽容性.
[1]RISTICB,ARULAMPALAMS,GORDONN.BeyondtheKalmanFilter:ParticleFiltersforTrackingApplications[J].IEEETransofAerospace&ElectronicSystems, 2004, 19(7): 37-38.
[2]CANDYJV.BayesianSignalProcessing:Classical,ModernandParticleFilteringMethods[M].Hoboken,NewJersey, 2009: 369-417.
[3]CANDYJV,SULLIVANEJ.Model-basedIdentification:AnAdaptiveApproachtoOcean-acousticProcessing[J].IEEEJournalofOceanicEngineering, 1996, 21(3): 273-289.
[4]PORTERMB.TheKRAKENNormalModeProgram[R].SACLANTUnderseaResearchCentre,May17, 2001: 1-196.
[5]CANDYJV.EnvironmentallyAdaptiveProcessingforShallowOceanApplications:ASequentialBayesianApproach[J].JournaloftheAcousticalSocietyofAmerican, 2015, 138(3): 1268-1281.
Modal Function and Horizontal Wavenumber Estimation Using Sequential Bayesian Filters
CHENG Zefeng, PAN Xiang
(CollegeofInformationScience&ElectronicEngineering,ZhejiangUniversity,HangzhouZhejiang310027,China)
Combining acoustic pressure-field model and measurements based on model-based signal processing in shallow water waveguide, this paper introduces a solution to nonlinear state-parameter estimation problem. It focuses on the two algorithms, the extended Kalman filters and the particle filters, to estimate the parameters of acoustic pressure-field after analyzing the normal mode model representations of acoustic pressure-field. The theoretical analyses and the simulation results both show that the two algorithms are capable of estimating the modal functions and horizontal wavenumbers correctly. Meanwhile, the particle filter algorithm has a better robustness.
sequential Bayesian estimation; particle filter; model-based processing; underwater acoustic waveguide
10.13954/j.cnki.hdu.2017.01.011
2016-09-14
国家自然科学基金资助项目(61571397)
程泽丰(1993-),男,浙江舟山人,硕士研究生,电子与通信工程.通信作者:潘翔副教授,E-mail: panxiang@zju.edu.cn.
TN929.3
A
1001-9146(2017)01-0046-05
猜你喜欢
声学技术(2023年4期)2023-09-14 01:00:12
电子测试(2022年16期)2022-10-17 09:32:26
数学物理学报(2022年4期)2022-08-22 04:09:20
铁道通信信号(2020年12期)2020-03-29 06:21:56
汽车工程(2018年12期)2019-01-29 06:46:36
家庭影院技术(2018年11期)2019-01-21 02:20:54
电测与仪表(2016年9期)2016-04-12 00:30:02
地球物理学报(2014年4期)2014-09-25 02:16:34
声学与电子工程(2014年2期)2014-03-10 03:26:28
振动工程学报(2014年2期)2014-03-01 01:15:23