
一种平面曲柄滑块五杆机构的路径生成方法
2017-03-01 08:56:24陈青欣孙金风
湖北工业大学学报 2017年1期
陈青欣, 王 君, 汪 泉, 任 军, 孙金风
(湖北工业大学机械工程学院, 湖北 武汉 430068)
一种平面曲柄滑块五杆机构的路径生成方法
陈青欣, 王 君, 汪 泉, 任 军, 孙金风
(湖北工业大学机械工程学院, 湖北 武汉 430068)
平面连杆机构的路径生成问题是机构综合中三个基本任务之一。讨论了曲柄滑块四杆机构的同源机构建立,且在曲柄滑块五杆机构向量环的基础上,得出了曲柄滑块机构综合的向量方程,并使用Cramer法则对方程进行求解。最后由此方法给出了相应的机构综合实例。
路径生成; 同源机构; 曲柄滑块五杆机构; 平面机构综合
曲柄滑块机构是铰链机构的演化形式,由若干刚性构件用低副(转动副、移动副)联接而成的一种机构。机构由曲柄(或曲轴、偏心轮)、连杆、滑块通过移动副和转动副组成,常用于将曲柄的回转运动变换为滑块的往复直线运动,或者将滑块的往复直线运动转换为曲柄的回转运动。其运动副均为低副,运动副元素间接触面积较大,应力较小,承载能力较强。低副元素几何形状简单,制造方便,能获得较高的制造精度,在自动送料机、冲床、内燃机、空气压缩机等各类机械中得到广泛应用。解决曲柄滑块机构路径生成问题的主要目的是设计一个能引导刚体通过一系列给定位置的连杆机构。四连杆机构通常使用Grashof准则进行分类。Ting[1]提出并证明了五杆机构的分类准则。Grashof准则作为一种特殊情况被包括在这种五杆机构的分类准则里。Ting和刘[2]提出了单闭环的N-bar旋转定理,并对此进行了证明。这些准则对平面机构的装配条件、连杆机构综合、可动性研究和单闭环N杆机构的分类提供了有效的解决方法。Ting[3]还利用在文献[1-2]所述的分类准则对连杆机构进行分类并且推导出不同类别连杆机构的工作空间和静态曲线。文献[4]提出了通过列出矢量环方程的方法解决曲柄滑块四杆机构的路径生成问题,运用同伦法求解综合得到机构。
关于对称五杆机构,Gao等[5-7]用所建立的一个无量纲的物理模型来表示机构的尺度关系。Cervantes-Sanchez等[8-9]通过两个非固定铰链得出两个二次方程以此确定了工作空间,并且通过雅可比矩阵获得了工作空间中的奇异曲线。关于闭环五杆机构,Fallahi等[10]运用隐函数理论推导出工作空间的边界条件。Zhou和Cheung[11]介绍了解决复杂五杆机构的路径生成问题的方法,并对复杂连杆机构进行了分类以分析其工作空间,总结出一种优化复杂连杆机构的方法。Zhou和Ting[12-13]提出一种综合曲柄滑块机构的方法,通过调整滑块导向生成多个平行路径,同时对曲柄滑块五杆机构进行了综合与分析,得出了两种类型的工作空间曲线以及4种可能的结构。
曲柄滑块四杆机构已经在工业生产中得到了广泛应用,对于五连杆机构的研究目前主要集中在旋转关节的类型上。本文首先使用作图法通过对曲柄滑块四杆机构同源机构的建立,扩大了平面机构综合时机构方案的选择范围;然后,通过曲柄滑块五杆机构运动过程中任意给定两位置间的向量关系组成两个独立的向量环,并分别对其列出矢量方程;最后运用Cramer法则对方程组进行求解,使得综合所得到的机构能够引导一个刚体通过若干给定位置。
1 曲柄滑块四杆机构的同源机构建立
1.1 理论依据
根据Roberts-Chebyshev定理,曲柄滑块机构是平面四杆机构的特殊形式,存在着两个不同的滑块机构可以生成同一条连杆曲线,故曲柄滑块机构的同源机构[14]只有一个,由此可根据铰链四杆机构的同源机构的实现方法推导出曲柄滑块四杆机构的同源机构[15]。
1.2 同源机构的建立方法
图1所示为曲柄滑块四杆机构。将向量AB,BP,PC、CD分别用u,x,y,z表示。与此同时,可以用a=u+x来表示AP。接下来,可以根据以下步骤建立曲柄滑块四杆机构的同源机构:首先,通过三角形ABP构建平行四边形ABPB′,确定点B′;然后构建△PB′C′,使得△PB′C′∽△CBP,由此确定C′点的位置;滑块C′沿φ角度做直线运动。此时,点P为两个连杆平面所共有,描绘出相同的轨迹。

图 1 曲柄滑块四杆机构的同源机构
1.3 同源机构的意义
曲柄滑块机构与其相对应的同源机构的尺寸和安装参数不同,却能满足完全相同的轨迹生成的约束条件。在实际应用中,由于传动性能或者工作空间等因素的限制而无法选用某一机构,此时可选择该机构的同源机构来替换。同源机构扩大了平面机构综合时机构方案的选择范围。
2 曲柄滑块机构综合
2.1 四杆机构综合方法
曲柄滑块四连杆综合问题的解析方法有平面位移矩阵法和矢量环方程法。平面位移矩阵法主要是通过杆件长度或滑块位移斜率等约束条件建立相应的约束方程,对机构进行设计。大部分连杆机构都可以被看作是矢量环的组合,可根据向量的特点对独立的向量环列出相应的设计方程,这就是矢量环方程法。
2.2 五杆机构的矢量环方程综合
矢量环方程法有效地解决了大部分铰链多杆机构的综合问题和可动性问题,但对曲柄滑块五杆机构的综合问题未予涉及,使得该方法在实际运用中受到了限制。
综合曲柄滑块机构的目的是为了设计一个机构,使得点P顺序通过一系列给定位置(图2)。
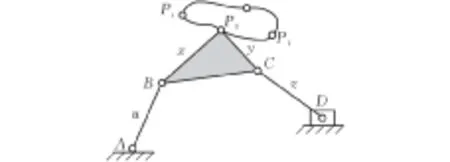
图 2 二自由度曲柄滑块五杆机构
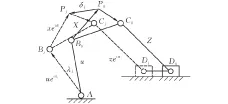
图 3 曲柄滑块机构从P0位置运动到Pj位置的的机构简图
图3为曲柄滑块机构从P0位置运动到Pj位置的的机构简图。可由独立的向量环P0PjBjAB0P0列出方程
u+x+δj=ueiλj+xeiθj
(1)
给定三角形3个位置时,可以列出方程组
(2)
如果δ2、δ3和θ2、θ3被给定,λ2、λ3被选定,由Cramer法则[16]可求解:
(3)
(4)
给定三角形4个位置时,可以列出方程组
(5)
此方程为非线性方程,需用迭代法对其求解。
同理,可由独立的向量环P0C0D0DjCjPjP0列出方程
y+z+djω=yeiθj+zeiαj+δj
(6)
给定三角形3个位置时,可以列出方程组
(7)
此方程含有3个未知向量,则当选定ω的值时:
(8)
(9)
给定三角形4个位置时,可以列出方程组
(10)
如果δ2、δ3和θ2、θ3被给定,α2、α3被选定,由Cramer法则可求解:
(11)
(12)
(13)
3 机构综合实例
给定连杆3个位置:δ2=-9.66-1.96i,θ2=12°,δ3=-10.91-12.67i,θ3=58°,设计一个曲柄滑块五杆机构使得P点能够通过给定的3个位置。
由上述方法,得出以下求解步骤。
1)计算连架杆向量u和刚体向量x的值。
通过作图分析,合理选取λ2=90°,λ3=198°,由式(3)、(4)得
1.89+6.81i
2)计算刚体向量y和连接滑块的连杆向量z的值。
通过作图分析,合理选取α2=2.87°,α3=35.63°,d2ω=-8.62+0i,d3ω=-8.2+0i,由式(8)(9)得
7.67-4.34i
5.09-6.17i
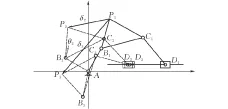
图 4 机构综合实例
按照上述所得数据,可以综合得到机构简图(图4)。在实际应用中,可以通过相关参数的约束,选定适合的尺寸对机构进行综合。
4 结论
本文首先根据铰链四杆机构的同源机构实现方法推导出曲柄滑块四杆机构的同源机构,使平面机构综合时机构方案的选择范围得以扩大。同时,解决了曲柄滑块五杆机构的路径生成问题:首先将机构中各杆件用向量表示,然后利用两个给定位置形成的独立向量环列出向量方程,从而将机构综合问题转化成解方程组问题。最后通过作图法合理选取所需参数,并运用Cramer法则对方程组进行求解。
机构综合向量方程不仅可以用于解决机构综合中位置综合的问题,还可以解决函数综合和轨迹综合的问题。
[1]TingKL.Five-BarGrashofCriteria[J].JournalofMechanicalDesign, 1986, 108(4):533-537.
[2]TingKL,LiuYW.Rotatabilitylawsforn-barkinematicchainsandtheirproof[J].AsmeJournalofMechanicalDesign, 1991, 113(1):32-39.
[3]TingKL.Grossmotionandclassificationofmanipulatorswithclosed-loop,four-barchains[J].InternationalJournalofRoboticsResearch, 1992, 11(3):238-247.
[4]TariH,SuHJ.CompleteSolutiontotheEight-PointPathGenerationofSlider-CrankFour-BarLinkages[J].JournalofMechanicalDesign, 2010, 132(8).
[5]GaoF,ZhangXQ,ZhaoYS,etal.Distributionofsomepropertiesinphysicalmodelofthesolutionspaceof2-DOFparallelplanarmanipulators[J].Mechanism&MachineTheory, 1995, 30(6):811-817.
[6]GaoFeng,ZhangXiao-Qiu,ZhaoYong-Sheng,等.Aphysicalmodelofthesolutionspaceandtheatlasofthereachableworkspacefor2-DOFparallelplanarmanipulators:ФиэихecкийMoдeлв и вceвидпoпopcтpaнcтвepeшeния плocкиxpoбoтoв пapaллeлвнoгocoeдинeнe[J].Mechanism&MachineTheory, 1996, 31(2):173-184.
[7]GaoF,LiuX,GruverWA..Performanceevaluationoftwo-degree-of-freedomplanarparallelrobots[J].MechanismandMachineTheory, 1998,33 (6) :661-668.
[8]Cervantes-SanchezJJ,,Rendon-SanchezJG.Asimplifiedapproachforobtainingtheworkspaceof2-DOFplanarparallelmanipulators[J].MechanismandMachineTheory, 1999,34 (7): 1057-1073.
[9]Cervantes-SánchezJJ,Hernández-Rodr′GuezJC,Rendón-SánchezJG.Ontheworkspace,assemblyconfigurationsandsingularitycurvesoftheRRRRR-typeplanarmanipulator[J].Mechanism&MachineTheory, 2000, 35(8):1117-1139.
[10]FallahiB,LaiHY,NaghibiR,etal.Astudyoftheworkspaceoffive-barclosedloopmanipulator[J].Mechanism&MachineTheory, 1994, 29(5):759-765.
[11]ZhouH,CheungbEHM.Analysisandoptimalsynthesisofhybridfive-barlinkages[J].Mechatronics, 2001, 11(3):283-300.
[12]ZhouH,TingKL.Adjustableslider-cranklinkagesformultiplepathgeneration[J].Mechanism&MachineTheory, 2002, 37(5):499-509.
[13]ZhouH,TingKL.Pathgenerationwithsingularityavoidanceforfive-barslider-crankparallelmanipulators[J].Mechanism&MachineTheory, 2005, 40(3):371-384.
[14]HanenbergRS.DenavltJ.Cognatelinkages[J].MachineDesign,1959,16: 149-152.
[15] 吴鑫,宋磊,张海军. 曲柄滑块机构连杆轨迹的同源机构与运动仿真[J]. 机械科学与技术,2003,22(3):438-452.
[16] 杨胜良,吴珍芳,海射香.Cramer法则在数值计算中的若干应用[J]. 大学数学,2011,27(2):187-191.
[17] 贾先,赵升吨,范淑琴,等. 双动压力机用压边滑块串联四连杆工作机构的优化[J]. 中国机械工程,2016,27(9):1223-1228.
[18] 李烨健,孙宇,胡峰峰. 多杆高速机械压力机机构优化设计[J]. 中国机械工程,2015,26(1):31-36.
[19] 王成志,陈扼西,纪跃波. 平面四杆机构的定性和定位轨迹综合[J]. 中国机械工程,2003, 14(19):1623-1627.
[责任编校: 张 众]
A Method for the Path Generation of Planar Five-Bar Slider-Crank Mechanisms
CHEN Qingxin,WANG Jun,WANG Quan,REN Jun,SUN Jinfeng
(CenterforIndustrialRoboticsResearch,HubeiUniv.ofTech.,Wuhan430068,China)
The path generation problem of planar linkages is one of three fundamental tasks in linkage synthesis. This paper discusses the cognate mechanism of the planar four-bar slider-crank mechanism. Based on the vector equations of the planar five-bar slider-crank linkages, the synthesis equations are obtained and solved by the Cramer rules. Finally, an example is given to demonstrate this method.
path generation;cognate mechanism;five-bar slider-crank mechanism;planar linkage synthesis
2016-10-25
国家自然科学基金项目(51405140);湖北省自然科学基金重点项目(2015CFA112);湖北省教育厅优秀中青年科技创新团队联合资助(T201505)
陈青欣(1991-), 女,湖北武汉人,湖北工业大学硕士研究生,研究方向为机构学及工业机器人
王 君(1977-),男,湖北蕲春人,工学博士,湖北工业大学教授,研究方向为机构学及机器人技术
1003-4684(2017)01-0101-04
TH112.1
A
猜你喜欢
——紫 苏
河南农业(2024年1期)2024-01-19 01:56:54
华人时刊(2023年1期)2023-03-14 06:43:36
汉字汉语研究(2021年2期)2021-08-30 08:58:46
机械工程师(2021年4期)2021-04-19 07:27:56
装备制造技术(2020年2期)2020-12-14 03:09:26
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
河北书画研究(2016年3期)2016-04-28 08:55:35
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36
