基于测量机器人的碾压质量监控系统数据处理与应用
2017-02-10 10:02:20李洋洋黄声享
测绘工程 2017年5期
李洋洋,黄声享,2,张 文
( 1.武汉大学 测绘学院,湖北 武汉 430079;2.地球空间信息技术协同创作中心,湖北 武汉 430079)
基于测量机器人的碾压质量监控系统数据处理与应用
李洋洋1,黄声享1,2,张 文1
( 1.武汉大学 测绘学院,湖北 武汉 430079;2.地球空间信息技术协同创作中心,湖北 武汉 430079)
测量机器人具有目标自动跟踪功能,将其应用于填筑工程碾压施工中,可实现对碾压机械的实时监控,确保施工质量。在实际应用中,为了实时显示并反馈碾压状况,需要对测量机器人的监控数据进行实时的数据处理。文中结合该系统的应用情况,介绍数据处理的主要实现过程,并采用GDI+绘图技术实现碾压监控参数的图形输出,起到良好的应用效果。
测量机器人;质量监控;数据处理;GDI+
大坝填筑碾压施工质量直接影响到大坝安全运营。为保证大坝填筑碾压施工质量主要采用“双控”制,即控制施工碾压参数(碾压机械的运行速度、碾压遍数、摊铺层厚度和平整度)和现场挖坑取样检测。这种方法对堆石坝建设具有十分重要的作用,但该方法主要是通过人工实现,不能满足大规模机械化施工的要求[1-4]。目前,基于GPS和基于测量机器人两种监控技术均可用于大坝碾压监控。基于GPS的碾压监控技术已逐渐成熟,但因GPS本身高程精度不够,需要对空通视的特点在一定程度上限制其使用,特别在峡谷河段内对天通视较差,信号弱,可能导致系统无法正常运行。而基于测量机器人的监控技术具有系统结构简单,平面、高程方向精度较高,适用性强,操作简便等特点,根据大坝工程项目实际的施工环境、监控要求等情况,利用测量机器人的实时、连续、自动化、高精度以及使用环境灵活等特点[5-8],研发出基于测量机器人的大坝填筑碾压施工质量监控系统。然而在实际观测中,由于施工现场环境复杂多变,系统所获取的监控数据不能直接进行处理,否则会导致碾压监控参数计算不正确,故需进行监控数据的预处理。预处理过程主要包括坐标转换、过滤静止、区域选择、时段分割等,预处理完成后再进行监控参数计算。碾压监控参数主要包括碾压机械的运行速度、运行轨迹和碾压遍数等。利用GDI+(GDI,Graphical Device Interface)绘图技术[9-10],可以将监控参数以图形的形式输出,使监控结果直观、清晰地展示给用户。
1 系统简介
基于测量机器人的大坝填筑碾压施工质量监控系统的组成框架如图1所示,其包括监控中心、控制点组和监控移动远端3部分。
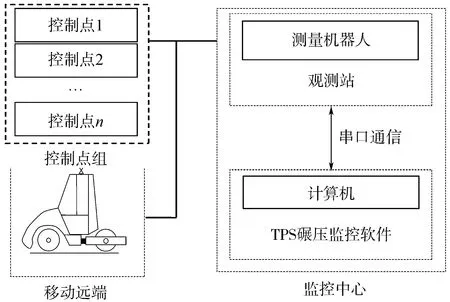
图1 TPS碾压监控系统组成
监控中心由测量机器人、计算机、TPS碾压监控软件组成。控制点组由多个已知控制点组成,用于确定观测站坐标。监控移动远端由碾压机械及固定在其顶端的信号反射器组成。
2 碾压监控数据处理
碾压监控数据处理包括监控数据获取、数据预处理、碾压参数计算、碾压参数的图形显示等4个步骤,如图2所示。
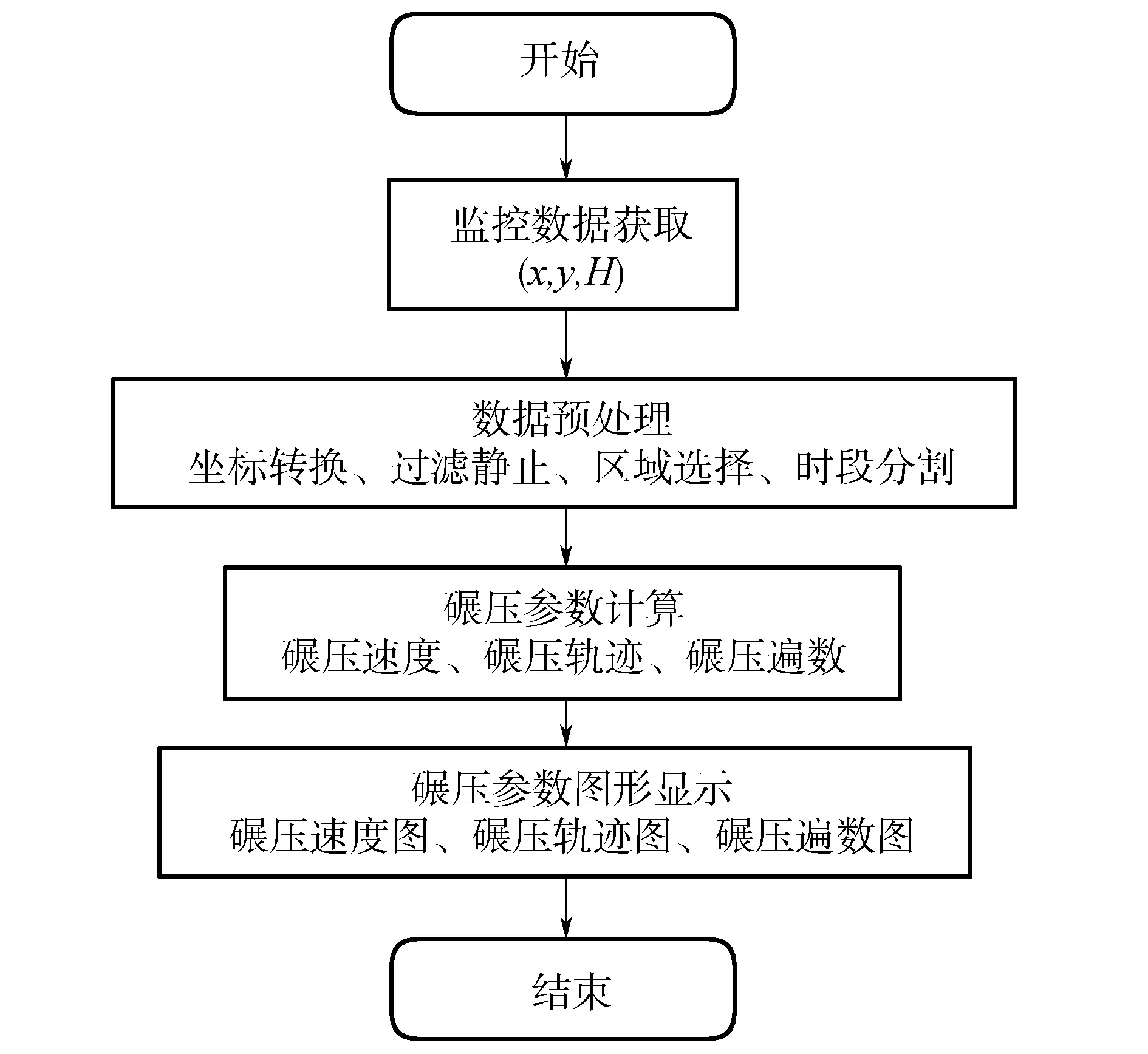
图2 碾压监控数据处理流程
2.1 监控数据获取
利用测量机器人的自动跟踪功能,TPS碾压监控软件以串口通信的方式访问测量机器人,获取坐标信息并保存至TXT文档中。碾压监控数据格式及示例如表1所示。
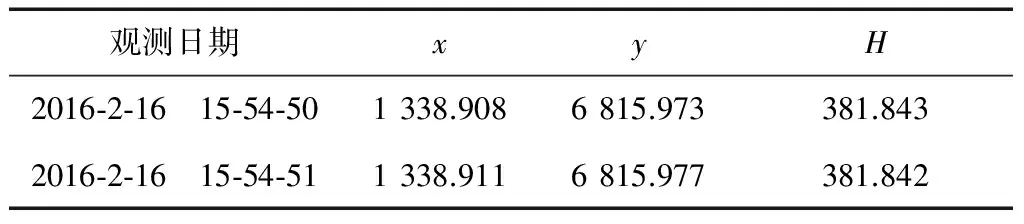
表1 碾压监控数据格式 m
2.2 监控数据预处理
在实际碾压监控过程中,碾压机械中途停碾、在不同区域混合碾压等情况时常发生,导致观测数据存在大量冗余、数据错乱等问题;同时在计算机绘图时,需将工程坐标转换为屏幕坐标,故需对观测数据进行预处理。预处理包括:坐标转换、过滤静止、区域选择、时段分割等。
2.2.1 坐标转换
在使用GDI+绘图时,首先要将工程坐标转化为计算机屏幕坐标。将屏幕绘图区域中心点和碾压区域中心点匹配,根据工程坐标点与碾压区域中心点的距离和比例因子来计算屏幕坐标如图3所示(图3中xoy坐标系为工程坐标系,XOY为屏幕坐标系,小写字母表示在工程坐标系下的坐标点,大写字母表示在屏幕坐标系下的坐标点,如c(C)。dx(Dy)中dx表示在工程坐标x方向的坐标跨度,Dy表示在屏幕坐标Y方向的坐标跨度)。
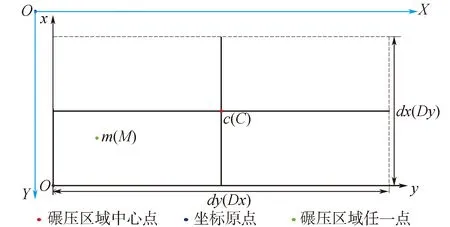
图3 坐标转换示意图
坐标转换算式为
(1)
式中:X,Y为屏幕坐标系中任一点坐标;x,y为工程坐标系中任一点坐标;X0,Y0为屏幕中心点坐标;x0,y0为碾压监控区域中心点坐标;旋转角θ=90°;k为工程坐标向屏幕坐标转换的比例因子;S为屏幕绘图缩放因子,通过改变其值可进行图像的放大、缩小等操作。
2.2.2 过滤静止
在碾压监控过程中,存在碾压机械临时停碾,但不知何时重新开始碾压的情况,故在碾压机械静止时也进行了观测,导致存在大量冗余的观测数据,需要将在静止状态时的观测数据过滤掉。根据坐标点间的距离进行判断,设置一定的距离阈值,当相邻时刻距离变化小于该阈值时,认为碾压机械未开动,在观测数据中将其剔除。
2.2.3 区域选择
在碾压监控过程中,存在同一碾压区域在不同的时段碾压,或同一时段在不同区域碾压的情况,因不同区域的碾压指标及要求不同,故需将在同一碾压区域的观测数据筛选出来。通过射线法判断点与多边形的关系[11]进行筛选。利用鼠标绘制出筛选区域,遍历所有观测点,当观测点在该区域内时,则将其保存在数据链表中,按观测文件格式生成区域选择文件。
2.2.4 时段分割
因原始的观测数据可能在时间上不完全连续,且对观测数据进行了过滤静止操作,观测数据不再连续,需进行文件分割。将观测数据分割后,可更加真实的反映碾压机械的运行状态。根据坐标点间的时间间隔判断,设置一定的间隔阈值,若相邻坐标点间的时间间隔超过该阈值,则认为开始了一个新的观测时段。将不同的观测时段文件保存在数据链表中,按观测文件格式生成观测文件。
2.3 碾压参数计算
监控数据经预处理后,可进行碾压参数计算。碾压参数主要有:碾压机械的碾压轨迹、碾压速度和碾压遍数等。
2.3.1 碾压轨迹
碾压轨迹反应碾压机械实时运行轨迹如图4所示。设在ti,ti+1,ti+2,ti+3,ti+4时刻的观测点为Ti,Ti+1,Ti+2,Ti+3,Ti+4。

图4 碾压轨迹示意图
碾压机械滚筒轮轴的位置计算(以Li,Ri为例)主要步骤如下:
1)由Ti,Ti+1的坐标、碾压机械滚筒轮轴宽度d、信号反射器与滚筒轮轴间的相对位置关系可求出Li,Ri的坐标。
2)由Li,Ri的坐标求出滚筒轮轴中点坐标。将滚筒轮轴中点在不同时刻的坐标点相连接即可得到碾压轨迹(如图4加粗线条所示),由滚筒左右坐标点组成的多边形即为碾压带(如图4虚线所围成的区域所示)。
2.3.2 碾压速度
碾压速度根据观测点间的距离与时间差的比值来计算。设相邻时刻ti,ti+1的观测点坐标分别为pi(xi,yi,zi),pi+1(xi+1,yi+1,zi+1),则碾压速度v利用式(2)计算。其中Δt=ti+1-ti,实际中Δt=1s。
(2)
2.3.3 碾压遍数
碾压遍数利用格网法进行计算。利用格网法进行碾压遍数统计分析主要步骤如下:
1)根据碾压范围,将碾压区域格网化,并将格网单元的碾压遍数值初始化为0。在格网化过程中,应根据实际情况适当设置格网规格。若格网太大,则碾压遍数统计不准确;若格网太小,则增加计算量,耗时较长。
2)以ti,tj时刻滚筒轮轴的位置组成多边形ABCD,根据ABCD确定格网分析区域R1。在组成多边形的时候,ti,tj两观测时段坐标点间距离应大于一定值(根据实际情况而定),否则R1中可能找不到包含于多边形的点,导致碾压遍数统计错误。
3)利用射线法判断R1中格网单元的中心点是否在轨迹多边形内。若在多边形内,该格网单元的碾压遍数增加1,依此类推计算出所有格网单元的碾压遍数。
4)根据格网单元的碾压遍数值,填充相应的颜色,得到碾压遍数统计图,如图5所示。
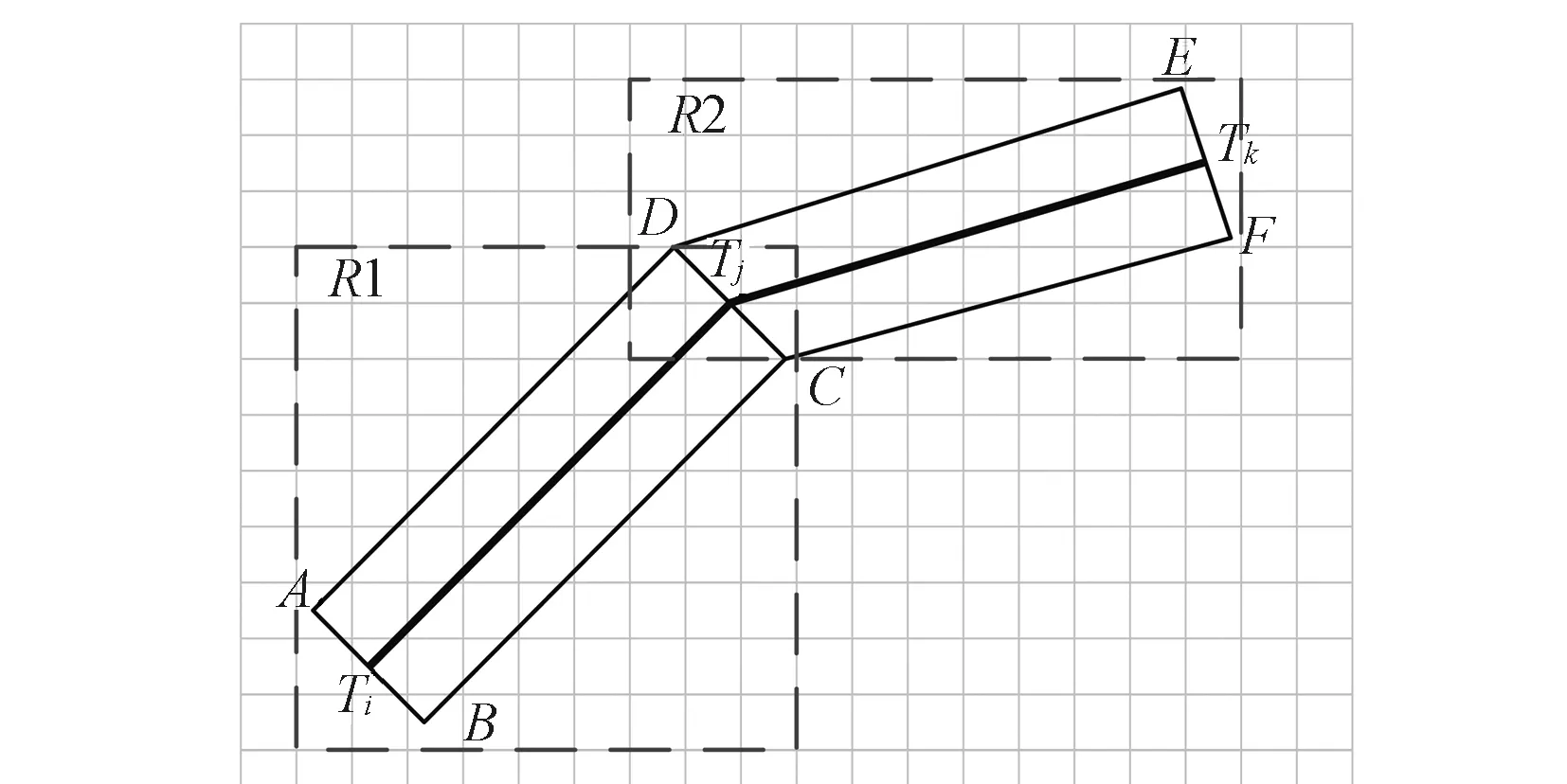
图5 碾压遍数统计示意图
2.4 碾压参数图形显示
GDI+是GDI的升级产品,较GDI具有很多优点,使得绘图更加容易、方便。GDI+提供绘图表面、钢笔、画刷、图像、文字等基本的绘图功能,使用C#编程语言调用其基本函数,可绘制出碾压参数图形。
2.4.1 碾压速度图
碾压速度图反映某碾压时段内,碾压机械的运行速度,如图6所示,其可真实地反映出碾压机械在运行中的速度实时变化情况。从图6中可以得出碾压机械最大行驶速度3.8 km/h,平均速度2.5 km/h。
2.4.2 碾压轨迹与碾压遍数图
碾压轨迹图反映碾压机械的实际运行轨迹如图7所示,碾压遍数图反映该区域内的碾压遍数分布情况如图8所示。从图7可知,碾压轨迹均匀、紧密;从图8可知,中心区域碾压最大遍数为14遍,绝大部分区域为10遍以上。

图6 2016-04-25 1#碾压车实时速度图

图7 碾压轨迹图

图8 碾压遍数图
3 结束语
基于测量机器人的碾压质量监控系统具有实时、连续、自动化、高精度以及使用环境灵活等特点,在观测视条件良好的情况下,可实现无间断自动跟踪测量。目前该系统已在大坝填筑碾压质量监控中应用,为大坝填筑碾压质量起到积极保障作用。通过对监控数据进行预处理,去除冗余的数据,对不同碾压区域的观测数据做出正确划分,将不同时段数据分割开,可更加真实地反映碾压情况。
[1] 黄声享,刘经南,吴晓铭.GPS实时监控系统及其在堆石坝施工中的初步应用[J].武汉大学学报(信息科学版),2005,30(9):813-816.
[2] 黄声享,曾怀恩.GPS实时控制系统碾压试验的高程精度评定[J].测绘信息与工程,2004,29(5):39-40.
[3] 吴晓铭,黄声享.水布垭水电站大坝填筑碾压施工质量监控系统[J].水力发电,2008, 34(3):47-49.
[4] 曾怀恩.基于GPS的路基压实质量控制方法研究与系统实现[D].武汉:武汉大学,2008.
[5] 梅文胜,杨红.测量机器人开发与应用[M].武汉:武汉大学出版社,2011.
[6] 何海清,黄声享,伍根.碾压施工质量监控的径向神经网络拟合高程研究[J].武汉大学学报(信息科学版),2012,37(5):594-597.
[7] 邓文彬,阿力甫·努尔买买提.测量机器人在隧道仰拱路基施工面的碾压监测[J].工程勘察,2015(3):57-60.
[8] 张先为,于磊.基于测量机器人的跨海三角高程自动测量系统[J].测绘与空间地理信息,2016,39(8):100-103.
[9] 杨建昌.GDI+高级编程[M].北京:清华大学出版社,2010.
[10] (美)Mahesh Chand.GDI+图形程序设计[M].韩江,译.北京:电子工业出版社,2005.
[11] 陈瑞卿,周健,虞烈.一种判断点与多边形关系的快速算法[J].西安交通大学学报,2007,41(1):60-63.
[责任编辑:张德福]
Data processing and application of the roller compactionquality supervisory system based on georobot
LI Yangyang1,HUANG Shengxiang1,2,ZHANG Wen1
(1.School of Geodesy and Geomatics, Wuhan University, Wuhan 430079,China;2.Collaborative Innovation Center of Geospatital Technology,Wuhan 430079,China)
Georobot has the function of automatic target tracking, which can be applied to the construction of the filling project, and realize the real-time supervisory of the rolling machine and ensure the construction quality. In practice, real-time data processing is needed to the supervisory data of georobot in order to display and feedback the roller compaction condition in real-time. Based on the development and application of this system, this paper introduces the main process of data processing, and uses GDI+ technology to achieve the graphics output of the roller compaction supervisory parameters, which has a good applicative effect.
georobot; quality supervision; data processing; GDI+
引用著录:李洋洋,黄声享,张文.基于测量机器人的碾压质量监控系统数据处理与应用[J].测绘工程,2017,26(5):67-70.
10.19349/j.cnki.issn1006-7949.2017.05.014
2016-05-20
国家自然科学基金资助项目(41274020)
李洋洋(1990-),男,硕士研究生.
P241
A
1006-7949(2017)05-0067-04
猜你喜欢
价值工程(2022年25期)2022-09-01 14:04:38
车主之友(2022年4期)2022-08-27 00:56:24
文苑(2020年8期)2020-09-09 09:30:20
空间科学学报(2020年6期)2020-07-21 05:36:46
东坡赤壁诗词(2018年5期)2018-12-17 12:19:22
水利水电工程设计(2017年1期)2017-05-17 05:20:20
昭通文学(2016年3期)2016-11-08 05:58:50
江西理工大学学报(2015年3期)2015-12-22 05:26:18
雪花(2014年1期)2014-04-11 09:03:18
测绘科学与工程(2014年4期)2014-02-27 07:06:03