基于MEMS的室内定位误差修正方法研究
2017-02-10 10:02:18朱彩杰赵冬青
测绘工程 2017年5期
朱彩杰,赵冬青,杨 洲
(1.信息工程大学,河南 郑州 450000;2.郑州联睿电子有限公司,河南 郑州 450000)
基于MEMS的室内定位误差修正方法研究
朱彩杰1,赵冬青1,杨 洲2
(1.信息工程大学,河南 郑州 450000;2.郑州联睿电子有限公司,河南 郑州 450000)
根据室内惯性定位存在误差累积的特点,建立广义似然比检测的方法进行零速度检测,利用Kalman滤波对检测到的“零速度”时刻进行零速修正(zero velocity update, ZUPT),从而有效降低系统累积误差。但行人行走过程中存在的无效振动,导致测得的加速度和角速度数据中出现明显的噪声,这对长时间定位精度产生较大的影响。文中提出在利用Kalman滤波进行误差校正之前首先采用Butterworth低通滤波滤除加速度和角速度数据中由无效振动引起的高频部分,即噪声部分,从而消除行人运动过程中的无效振动对定位精度的影响。
MEMS;室内定位;零速修正;无效振动修正;修正方法
随着数据业务和多媒体业务数据的增长,人们对定位与导航的需求日益增加,导航定位与社会的生产生活息息相关,室外的导航定位可以借助于全球卫星导航系统(GPS)与接收机之间的直接通信完成,但是室内环境尤其在复杂的室内环境下,如机场大厅、展厅、超市、图书馆、地下停车场、矿井等环境中,由于建筑物墙壁的遮挡,GPS信号无法穿透,因此利用GPS无法完成室内定位。当前出现许多室内定位技术及方案,如AGPS(辅助GPS)、红外线、超声波、蓝牙、WiFi、ZigBee、RFID、UWB、视觉定位、LED灯光定位及惯性导航(Inertial Navigation System, INS)。其中基于INS的室内定位随着微机电芯片(MEMS)技术工艺的不断提升和价格优势成为近年来常用的室内定位技术,由于惯性器件(加速度计和陀螺仪)误差和导航过程中所采用的重力场模型误差的存在[1],而且这些误差使得惯性导航系统的定位误差随时间累积。因此,在惯性定位技术中,研究误差来源及消除误差影响成为一大热点。
目前,针对室内惯性导航系统研究较为成熟的有:瑞典皇家工学院信号处理实验室的John-Olof Nilsson于2012年提出开源、实时的鞋绑式零速修正的惯性导航系统,该系统取得较短时间的高精度定位,但其样本造价较高,实用方面具有一定的局限性,且未对长期的定位精度进行研究[2]。西北工业大学的张金亮根据人行走时加速度的统计特性,设计一种比力模值+滑动方差的零速检测算法[3],校正惯性导航系统中的累积误差,有效提高定位精度;厦门大学的杨辉提出一种零速修正更新方法[4],实现在较远距离的情况下,系统仍能收敛并提供较高的定位精度。以上研究仍然不能通过零速修正完全消除误差累积对定位精度的影响,而且缺少对行人不同路径条件下定位精度的研究,未考虑安装在足部的惯性导航系统在行走过程中,受到无效振动对定位精度的影响。
针对这一问题,根据行人步行的特点及惯性器件输出的数据信息,本文采用3阶Butterworth低通滤波对导航数据进行处理,滤除由无效振动引起的噪声,然后利用广义似然比检测的方法检测出零速度时刻,并将该时刻的速度信息当作系统的速度误差,通过Kalman滤波对获取的信息进行修正[5],进而实时地获取载体的位置、速度和姿态等状态信息。实验证明该方案能够取得较单独使用Kalman滤波更优的定位精度。
1 基于MEMS的行人运动模型修正方法
足部惯导是众多惯性导航中的一种实施方式,它将MEMS固定于行人脚踝、足趾等部位,依据惯性传感器实时采集的行人运动参数如加速度、角速度和航向等信息来解算行人的运动状态,行走距离、速度和方向,从而完成定位和导航。
1.1 零速修正
将惯性器件安装在行人脚背上,通过行人运动可获得加速度和角速度信息,根据输出的加速度和角速度的变化特征,行人每步均可近似为一个“加速-减速”的变化过程[6],如图1所示。

图1 行人运动模型
根据行人行走过程中,脚着地时刻速度趋于零的特点,利用测得的加速度和角速度信息对误差进行校正,即零速修正,如图2所示。它是充分利用零速时刻的信息,采用Kalman滤波对状态信息进行校正,可以对惯性导航系统误差累积起到有效的限制约束。
根据行人运动模型的特点,将MEMS设备安装在行人的鞋上,与鞋体运动实时同步。行人导航系统的导航算法在传统捷联惯性导航算法基础上[7],采用脚着地零速时刻的信息对行人惯性导航过程中的状态信息进行校正。
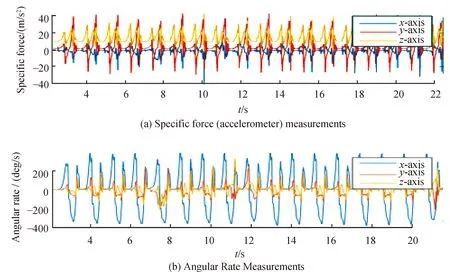
图2 加速度与角速度的测量值
从图2中的加速度和角速度测量值可以看出,在零速度时刻,三轴方向的角速度均为零,而三轴方向的加速度不全为零,矢量和为g。在地理坐标系中,设测量的重力加速度为fg,载体坐标系中,X,Y,Z轴上的分量为xg,yg,zg,建立重力加速度分别在载体坐标系和地理坐标系中表示的关系式[8],即
(1)

利用最大似然估计的方法,根据此时的加速度和角速度的幅值是否在给定阈值内进行判断[9],即
(2)

利用广义似然比检测的方法,检测出零速度时刻,并将该时刻的速度信息,作为速度误差,利用Kalman滤波计算出状态增量,进而对状态信息进行修正[10]。
建立卡尔曼滤波模型,状态方程为
(3)
式中:Xk为系统k时刻的状态量;Fk/k-1是系统k时刻的状态转移矩阵;BkUk为系统外部控制模型;Γk-1为系统噪声增益矩阵,代表从k-1时刻到k时刻,系统噪声分别影响k时刻系统各个状态的程度;Wk-1是k-1时刻的系统噪声。
量测方程为
(4)
式中:Hk为系统k时刻的观测矩阵;Vk是k时刻的观测噪声。滤波处理过程中,系统噪声和观测噪声均设为高斯白噪声[11],在不存在系统外部控制模型的情况下,检测到的零速时刻的速度即为速度误差,因此测量信息为零减去系统速度输出,即-vn,可得
(5)
更新后的状态信息为
(6)
其中,Kn为卡尔曼增益矩阵。
本文采用的卡尔曼滤波选取9维状态向量作为系统的状态向量,其中包括三维位置估计pn,三维速度估计vn和三维姿态角估计Φn,即
系统状态协方差矩阵P、状态噪声协方差阵Q和测量噪声协方差矩阵R分别为
P=diag(diag(10-10(1,1,1)),diag(10-10(1,1,1)),
Q=diag(diag(0.52,0.52,0.52),diag((0.5π)2,
R=diag(0.012,0.012,0.012).
在采用广义似然比检测出零速度时刻的基础上,零速修正可有效降低惯性导航中的累积误差的影响。
1.2 无效振动修正
由于行人运动过程中受到的无效振动(即高频噪声)的影响,需要采用低通滤波来消除这部分噪声的影响。
目前,常见的低通滤波有Butterworth滤波、切比雪夫滤波及椭圆型滤波,根据不同滤波自身存在的特点,并结合实际需要选择合适的滤波来对获取的信号进行处理[12]。与其它低通滤波相比,Butterworth滤波在通频带内的频率响应曲线最大限度平坦,没有起伏,在阻频带逐渐下降为零,在通带内,Butterworth滤波是无衰减的,而切比雪夫滤波较同级数的Butterworth滤波有较大的衰减量。故本文采用Butterworth滤波滤除导航数据中的高频部分。
审美教育在小学语文中的逐步渗透,不仅仅是素质教育的硬性要求,它更多体现的是人类教育文明的全面发展,也是对新一代健全人格塑造的极致追求。所以,小学语文在培养全面发展的人的方面有着不可替代的重要作用,希望今后我们在立足自身工作岗位的基础上结合实际教学经验以及教学情况,创设出更多优秀、高效的小学语文教学中渗透审美教育的方式方法,为我国教育事业的发展贡献力量。
Butterworth低通滤波模平方函数[13]为
(7)
Butterworth滤波中各项技术指标:ρp为通带衰减;σs为阻带衰减;Ωp为通带截止频率;Ωs为阻带截止频率。
按照指定的技术指标确定阶次
(8)
根据行人的步频可采用截至频率为3 dB。因此,阶次的取值为3,然后利用3阶Butterworth滤波处理设备输出的导航信息[14]。
2 实验与结果分析
2.1 实验方案
实验设备选取JY901 10轴MEMS模块,包括三轴加速度计、三轴陀螺仪(MPU6050)、三轴磁力计(HMC5883L)和气压计,采用的地理坐标系为“东-北-地”, 如图3所示。
实验场所选在某建筑物大厅走廊和AB栋之间衔接处弧形走廊,包括建筑物内部区域的回型路径和S型路径。实验中按照大小为8.4 m×14.4 m的回型路径行走两圈,较长边是13.2 m和较短边长7.2 m的S型路径行走往返两圈。数据采集时,将模块固定于脚背,数据采用RS232串口将数据传输至存储设备。

图3 JY901 10轴模块及坐标轴定义
2.2 实验结果与分析
首先进行未加任何修正的实验,分别按照回型路径和S型路径进行行走,实验结果如图4所示。
由图4可以看出:由于行人的位置信息是由加速度经二次积分得到,故位置的漂移误差被二次放大,行人的轨迹已远远偏离实际路线,由此可知,误差校正是很有必要进行的。
文中采用广义似然比检测方法检测出零速时刻,然后根据该时刻的信息利用Kalman滤波进行误差校正,修正状态信息,实验结果如图5所示。

图4 未经过任何修正的结果

图5 仅经误差校正,未通过低通滤波处理结果
从图5的轨迹可以看出:经过Kalman滤波进行零速修正后,行人的运动轨迹与真实的路径基本相符,极大地改善未经零速修正时的结果。但图5的轨迹间仍存在一定的偏差。分析实验过程可知,这种偏差是由于行人在行走过程中,无效振动引起加速度和角速度数据中存在噪声,导致经零速修正后的定位结果仍存在着偏移。为消除无效振动的影响可采用Butterworth低通滤波进行处理,实验结果如图6所示。
从图6可以看出:经Butterworth低通滤波进行处理后,高频噪声部分得到有效消除,定位偏差得到较大改善。
表1给出不同路径条件下的Butterworth低通滤波处理前后误差统计结果。
由表1可以看出:在不同路径的测试条件下,经过3阶Butterworth低通滤波处理后,足部惯性导航的运动轨迹更加平滑,室内定位精度也进一步得到提升,路径相对误差由原来的3.8%~5.3%降低为3.2%~4.6%,闭合误差由1.50~1.96 m降低为0.49~1.42 m,这表明该方案在任何路径条件下均能达到较高定位精度,有效改善仅仅通过零速修正后存在的定位误差。
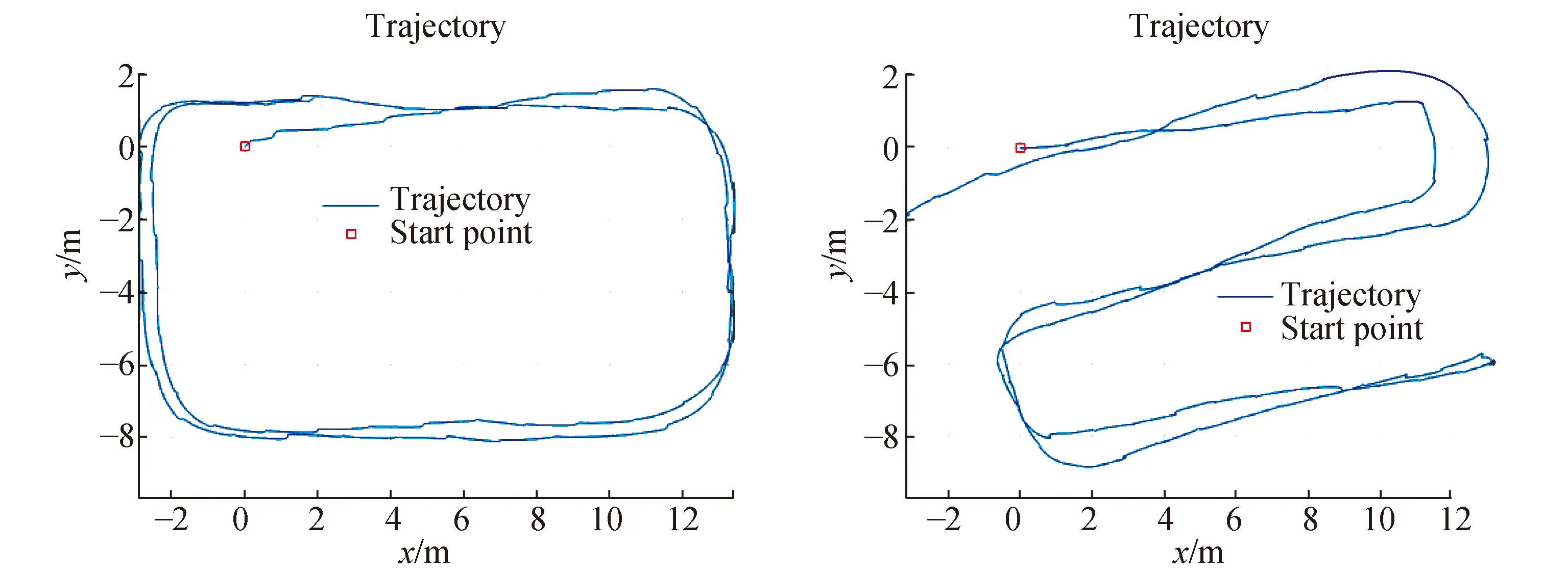
图6 经低通滤波+误差校正处理结果

表1 不同路径条件下的误差统计
3 结束语
1)采用MEMS进行室内定位过程中,选取合适的零速修正方法能够有效提高定位精度。
2)根据行人运动模型的特点,采用低通滤波可以有效消除无效振动对定位精度的影响,结合零速修正方法可以达到较长时间较高精度的定位效果。
3)采用零速修正和低通滤波处理仍然不能完全消除误差的影响,可以与其他定位技术相结合,进行优势互补,以期达到更高的定位精度。
[1] 杨艳娟.捷联惯性导航系统关键技术研究[D].哈尔滨:哈尔滨工程大学,2001.
[2] NILSSON J O, SKOG I, HANDEL P, et al. Foot-mounted INS for Everybody-An Open-source Embedded Implementation. 2012 IEEE/ION Position Location and Navigation Symposium,2012:140-145.
[3] 张金亮,秦永元,梅春波.基于MEMS惯性技术的鞋式个人导航系统[J].中国惯性技术学报,2011,19(3):253-256.
[4] 杨辉.基于MEMS传感器的高精度行人导航算法研究[D].厦门:厦门大学,2014.
[5] LIM Y P, BROWN I T, KHOO J C T. An Accurate and Robust Gyroscope-Based Pedometer[C]. 30th Annual International IEEE EMBS Conference Vancouver, British Columbia, Canada, August 20-24, 2008.
[6] 李辰祥.基于MEMS行人惯性导航的零速度修正技术研究[D].厦门:厦门大学,2014.
[7] SKOG I, NILSSON J O, HANDEL P. Evaluation of Zero-Velocity Detectors for Foot-Mounted Inertial Navigation Systems[C].International Conference On Indoor Positioning and Indoor Navigation(IPIN),2010.
[8] 以光衢.惯性导航原理[M].北京:航空工业出版社,1987.
[9] 高钟毓,王进,董景新,等.惯性测量系统零速修正的几种估计方法[J].中国惯性技术学报,1995,3(2):24-29.
[10] JAYALATH S, ABHAYASINGHE N, MURRAY I. A Gyroscope Based Accurate Pedometer Algorithm[C]. International Conferece on Indoor Positioning and Navigation,2013,10:28-31.
[11] LIU Rong, ZHOU Jianzhong, LIU Ming, et al. A Wearable Acceleration Sensor System for Gait Recognition[C].Second IEEE Conference on Industrial Electronics and Applications,2007:2654-2660.
[12] LEE S W, MASE K. Recognition of Walking Behaviors for Pedestrian Navigation[C]. Proceedings of the 2001 IEEE International Conference on Control Applications. 2001,9:1152-1156.
[13] DOPPLER J, HOLL G, FERSCHA A, et al. Variability in foot-worn sensor placement for activity recognition[C]. International Symposium on Wearable Computers, 2009:143-144.
[14] 张荣辉,贾宏光,陈涛,等.基于四元数法的捷联式惯性导航系统的姿态解算[J]. 光学精密工程,2008,16(10):193-201.
[15] 姜朋.基于MEMS-IMU的捷联式惯性导航系统技术与实现研究[D].哈尔滨:哈尔滨工程大学,2012.
[责任编辑:张德福]
A study of indoor positioning error correction method based on MEMS
ZHU Caijie1, ZHAO Dongqing1, YANG Zhou2
(1.Information Engineering University,Zhengzhou 450000,China;2.Zhengzhou Locaris Co.,Ltd,Zhengzhou 450000,China)
According to the accumulative error characteristics of the indoor inertial navigation, this paper exploits a generalized likelihood ratio detector to execute zero velocity detection. And then according to the moment of ‘zero velocity’ detected, Kalman filter is adopted to correct the accumulative errors (zero velocity update, ZUPT), thereby effectively reducing the system errors. However, because of the influence of invalid vibration during the pedestrians walking, it leads to the obvious noise in acceleration and angular velocity data, which has great influence on positioning accuracy for a long time. To address this concern, the paper adopts the order Butterworth low-pass filter to filter out noise (high frequency part) caused by invalid vibration among the navigation data before the zero velocity is updated (ZUPT) by Kalman filter.
MEMS; indoor positioning; ZUPT; invalid vibration correction; correction method
引用著录:朱彩杰,赵冬青,杨洲.基于MEMS的室内定位误差修正方法研究[J].测绘工程,2017,26(5):57-61.
10.19349/j.cnki.issn1006-7949.2017.05.012
2016-03-19
中国航天科技集团公司卫星应用研究院创新基金
朱彩杰(1988-), 女, 硕士研究生.
P228
A
1006-7949(2017)05-0057-05
猜你喜欢
导航定位学报(2022年5期)2022-10-13 08:43:40
北京航空航天大学学报(2022年7期)2022-08-06 07:28:18
城市轨道交通研究(2021年12期)2022-01-12 04:04:44
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
声学与电子工程(2021年2期)2021-07-26 05:54:04
湖北农机化(2020年4期)2020-07-24 09:07:44
电子制作(2017年1期)2017-05-17 03:54:07
导航与控制(2016年4期)2016-09-23 08:43:25
电测与仪表(2016年15期)2016-04-12 00:30:54
燕山大学学报(2015年4期)2015-12-25 02:19:55