
综合管廊智能巡检机器人的设计
2017-02-10 09:49裴文良周明静李军伟
制造业自动化 2017年1期
裴文良,周明静,李军伟
(中信重工开诚智能装备有限公司,唐山 063020)
综合管廊智能巡检机器人的设计
裴文良,周明静,李军伟
(中信重工开诚智能装备有限公司,唐山 063020)
针对城市地下综合管廊的巡检、监控问题,设计了一种实用的、可以代替人工进入管廊中进行巡检、数据采集和灾害报警的机器人装置,详细论述了巡检机器人的组成和功能,利用该巡检机器人系统可以实现对综合管廊的自动巡检,实现综合管廊的现场灾害处置,为城市工程管线的可靠运行提供全面的技术保障。
综合管廊;机器人;巡检;控制系统
0 引言
随着城市建设的不断发展,城市地下综合管廊的建设不断增多,地下综合管廊是城市的超级大动脉,它给城市带来从内到外的活力,但由于地下管线建设规模不足、管理水平较低等问题,使得一些城市相继发生大雨内涝、管线泄漏爆炸、路面塌陷、设施被盗等事件,严重影响了人民群众生命安全和城市运行秩序。综合管廊智能机器人移动监测系统,是专门针对地下综合管廊研发设计的智能一体化巡检方案。系统以综合管廊智能巡检机器人为核心,同时结合强大的远程监控平台,数据服务器以及相关附件,可实现对综合管廊环境与设备的不间断的移动往返监控监测及应急火灾报警和处置。本文从实用性角度出发,介绍了一种综合管廊智能巡检机器人的研制方法及应用。
1 综合管廊智能巡检机器人组成
综合管廊智能巡检机器人由以下六部分组成:机器人本体、灭火机器人平台、智能控制系统、轨道平台、供电平台和通信平台,如图1所示。
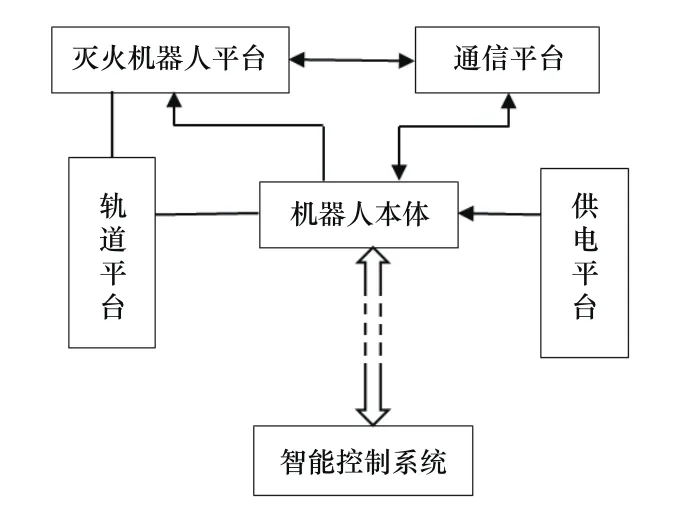
图1 综合管廊智能巡检机器人组成
1.1 机器人本体
机器人本体主要由图像采集系统、语音对讲及应急广播系统、环境检测系统、自主防撞与避障系统、精准定位系统和人员检测跟踪系统等组成,它是完成巡检任务的核心部件。
1)图像采集系统
图像采集系统搭载一体化高性能云台摄像机,集成高清摄像技术与热成像技术,可实现低照度下清晰成像。球机具有6条巡航扫描,每条可设置16个预置点,预置时间可调;旋转角度:垂直角度 从-20°(俯视)到+90°(仰视),水平角度:360°,连续旋转,无监视盲区。
2)语音对讲及应急广播系统
机器人本体搭载先进的双向语音对讲系统,可实现实时对讲,声音清晰、洪亮,对讲声音在110分贝以上。同时配备大口径镀金震膜咪头,本底噪声极低,采音更广泛。ClearSpeech自适应动态降噪处理技术,内置高速DSP数字信号处理器。独特设计的“电子噪声动态闭环抑制电路”,彻底消除“嘶嘶”电子噪音。监听范围:5~80m2,灵敏度可调。紧急事故发生,如检测到火光或者超温情况,机器人本体具备报警指示功能及机器人状态指示功能。
3)环境检测系统
巡检机器人环境监测系统可对管廊的环境参数进行检测,监测范围包括:可同时对O2、CO、H2S和CH4等4种气体的浓度进行检测和超限报警;可完成环境温度、湿度的检测,检测范围为:温度-40℃~+123.8℃;湿度为:0%~100%RH;另外可对烟雾、光照度以及火焰进行监测。
4)自主防撞与避障系统
机器人本体带有自主防撞与避障系统,采用超声波探测,可对障碍物和隧道内工作人员进行探测,遇到障碍自动停止,并报警,同时加装安全触边,防止碰撞造成人员及设备损伤。超声波探测距离0.1~4m,探测角度120°。
5)精准定位系统
机器人采用精准里程定位,实时上传自身位置信息,并通过GIS地图实现精准定位,同时也可关联百度地图实现精准位置锁定。
1.2 灭火机器人平台
灭火机器人与巡检机器人本体共用轨道系统、通讯系统、充电系统和控制系统,自身搭载超细干粉灭火器。灭火机器人能与巡检机器人联动,准确到达火灾位置,其运动性能与巡检机器人相同,如速度、爬坡能力、定位精度等。防护性能为IP65。
1.3 智能控制系统
智能控制系统是巡检机器人的控制核心,利用智能控制系统软件实现对巡检机器人的远程控制及信息处理等功能。
1)智能巡检
按照预先设定的巡检路线进行巡检,同时可通过集控系统在巡检过程中适时修改巡检点和路线。系统提供手动控制和自动控制两种对机器人的控制方式,并能在两种控制模式间任意切换。手动控制功能可实现对机器人本体、摄像云台、电源、可见光摄像机和红外热像仪的控制操作。自动控制时,系统能够在全自主的模式下,根据预先设定的任务或者由用户临时指定的任务,实现各种检测功能。
2)告警管理
控制系统对检测超标进行实时告警,能以短信、邮件、声音、软件界面提示等方式进行告警,并能以人机界面方式对所有存储的告警信息按照时间、地点或组合进行查询。
3)信息采集与数据处理
控制系统控制巡检机器人完成采集、存储检测数据和视频图像的功能,可对视频进行播放、停止、抓图、存储、全屏显示等;可实时记录、下传并在本地监控后台上显示巡检机器人的工作状态、巡检路线等信息;控制系统也具有采集、存储巡检机器人传输的音频信号功能,支持音频信息的录制、回放和可视化展示,展示内容包括声音波形、频域信息等;控制系统同时可采集、存储红外热图功能,并能够从红外热图中提取温度信息。
控制系统除完成信息采集功能外,还提供数据处理等功能。包括:自动生成设备缺陷报表、巡检任务报表,提供历史曲线;可按巡检时间、设备类型、设备名称、最高温度等过滤条件对巡检数据进行查询。所有巡检产生的数据,系统都将自动保存下来,并形成报表,可供用户打印巡检记录或者导出到Excel中。
1.4 轨道平台
综合管廊智能巡检机器人的轨道平台由工字型轨道构成,此轨道是一种专门特制加工的型材,它是轨道巡检机器人的主体支撑轨道。为满足不同需求,可采用多种模式:1)铝合金导轨:外观美观、重量轻,但成本较钢制导轨略高。2)钢制导轨:外观较铝合金导轨略显简陋,重量较重,但成本低。轨道平台要求承载重量150kg以上,每隔6米安装一只轨道固定支架。由于地下管廊中湿度较大,轨道要有较好的防锈处理。
1.5 供电平台
为保证巡检机器人正常工作,一定要有可靠的电源供应。本系统采用电池和分布式接触充电系统相结合的供电方式。分布式充电站采用接触式防打火安全充电技术,每隔1000米设置一台充电桩,充电系统具有良好的防打火性能,机器人车载电池单次充电能保证连续行走10km以上。
1.6 通信平台
综合管廊智能巡检机器人系统利用无线网络传输技术,实现远程监控平台对前端巡检机器人的控制。在综合管廊内每200米设置一台无线发射终端,实现综合管廊内无线网络的无缝隙覆盖。同时在综合管廊内铺设光纤通信传输网络,综合管廊内光纤通信传输网络敷设的光缆及四电口10/100M电信级光纤收发器作为本系统的主干传输设备,巡检机器人和远程监控中心通过以太网进行通讯。系统配备后备电源功能,主网失电后,系统能正常运行工作不少于1小时。
2 综合管廊智能巡检机器人功能设计
2.1 综合管廊的自动巡检
综合管廊智能巡检机器人可不间断地对综合管廊进行反复巡检,并对综合管廊的环境数据、声音、视频进行连续、动态的采集及存储。巡检机器人具备开机自检、自动休眠、上位唤醒等多种工作模式。远程控制端可控制机器人的行走速度:0~120m/min可调,具有自行匀速巡检、工作位置准确停车探测、紧急事件高速到达、遇到障碍自动停车告警以及遇到人员减速跟踪探测等功能。
2.2 巡检机器人行走方式设计
巡检机器人采用自动行走的悬挂轨道式设计,由电机驱动巡检机器人行走,从机械设计上保证机器人爬坡时,对摩擦力的要求。同时机器人具有姿态分析功能,当遇到上坡、下坡以及转弯等情况时,自动调整运行。因为机器人运行时靠轨道两侧的驱动轮夹紧运行,分别由各自电机驱动,当运行轨道存在上坡、下坡以及转弯等情况时,机器人的运行速度要发生变化。为了保证巡检机器人的监测质量,希望巡检机器人不论在任何环境下都能自由、平稳的行走。本系统采用了基于倾角传感器的巡检机器人调速装置及控制方法,通过巡检机器人内部预置的倾角传感器,实时采集机器人本体运行中姿态的变化,根据机器人本体行进方向俯仰角度、倾斜角度以及航向角度的变化,控制机器人本体合理的调整运行速度,使机器人本体行走能够满足各种工况环境的需求。
2.3 巡检机器人灾害处理手段
巡检机器人具有灾情预警、高温识别、火焰识别、定位、定点灭火能力。现场出现灾情时,巡检机器人可将事故现场的图像、环境温度、有害气体的含量等数据发送回指挥中心,并能通过应急对讲进行现场指挥作业或紧急疏散。巡检机器人还可依靠热成像技术穿透烟雾,准确探寻现场伤员位置,为抢险救援提供决策。
2.4 多样化的应用模式
巡检机器人系统具有多种应用模式,可以实现灵活、多样、快速、便利应用,诸如:例行巡检、遥控巡检、特殊巡检、设备精确测温、应急事故处理、远程监控指挥等高级功能。巡检机器人在发现异常或自身出现问题时,可以发出声音报警,并以短信或邮件形式通知用户。
3 结束语
综合管廊作为解决城市地下空间与管网问题的有效方式,代表了城市基础设施发展的必然方向和全新模式,其发展前景是毋庸置疑的。目前,对综合管廊的研究主要集中在开发利用的规划、设计和施工阶段,而对管廊后期的运营管理,特别是以电气控制技术为手段的运营管理方面的研究较少。城市地下综合管廊智能巡检机器人系统,可以实现对综合管廊的自动巡检,实现综合管廊的现场灾害处置,可与原有在线监控系统联动实现对综合管廊的智能化管理,为城市工程管线的可靠运行提供全面的技术保障,对保证综合管廊及综合管廊内工程管线的安全稳定运行具有重要意义。
[1] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85-88.
[2] 苏尚流,缪希仁.基于微型摄像头的轨道式变电站巡检机器人[J].电器与能效管理技术,2015(13):19-23.
[3] 吴璋,佃松宜,龚永铭,等.电缆管道巡检机器人远程测控系统的研究与实现[J].测控技术,2013,32(9):32-36.
[4] 祝赫,田梦,郑洪标.基于物联网的管道检测机器人研究与应用[J].给水排水,2014(10):96-99.
3 结束语
高精度激光焊接系统的应用,更加完善了电子元器件高精度自动装配与焊接系统在电子装配领域的不足之处,系统依靠其精度高、稳定性好、灵活度大等特点会在未来电子装配生产中占有一席之地。
参考文献:
[1] 曹凤国.激光加工工业技术[M].北京:化学工业出版社,2015.
[2] 熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,2004.
[3] 郎为民,稽英华.表面组装技术(SMT)及其应用[M].北京:机械工业出版社,2013.
The design of intelligent inspection robot for utility tunnel
PEI Wen-liang, ZHOU Ming-jing, LI Jun-wei
TP242
:A
1009-0134(2017)01-0091-03
2016-10-24
裴文良(1975 -),男,河北唐山人,高级工程师,本科,研究方向为矿山机械设备、自动化电子设备及产品设计、研发。
猜你喜欢
建材发展导向(2022年5期)2022-04-18
煤气与热力(2021年2期)2021-03-19
哈哈画报(2021年10期)2021-02-28
空间科学学报(2020年6期)2020-07-21
安全(2020年2期)2020-04-16
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
建材发展导向(2019年11期)2019-08-24
小型微型计算机系统(2019年6期)2019-06-06
太空探索(2014年4期)2014-07-19
