
基于双天线测向的航向对准数据处理方法研究
2017-02-05 11:30白玉栋李景岩
全球定位系统 2017年6期
白玉栋,李景岩
(91404部队,河北 秦皇岛 066000)
0 引 言
舰船航向精度关系到武器系统和探测系统作战效能的发挥,在舰船作战系统试验中,航向精度检验是其他装备试验的基础[1-2]。舰船的姿态测量系统通常采用惯性测量设备,由于惯性元件的零偏、漂移问题,长时间工作系统精度变差,为了满足长时间保持精度的试验需求,需要对惯导测姿系统艏向角零偏、漂移进行动态监测,本文将研究基于卫星载波相位差分航向测量,以实现舰船航向实时动态监测。双天线航向测量设备是在载体平台上适当配置两个天线,利用双频载波相位差分测量技术,求解基线矢量,通过坐标转换求得载体航向角、俯仰角,从而得到载体的航向信息[3-5]。受到舰船甲板建筑的限制和安装误差的影响,实际应用中两个天线在舰船上架设位置的连线与舰船艏艉线不平行,造成航向测量与舰船实际航向存在误差。本文结合舰船艏向角零位检查试验,分析舰船姿态及天线架设位置对航向测量误差影响,研究适合舰船试验的数据处理方法。
1 相关坐标系及坐标转换[6-7]
1.1 舰船地理坐标系
舰船地理坐标系O-XTYTZT的原点O位于舰船摇摆中心,XT轴平行于当地水平面指向正东,YT轴平行当地水平面指向正北,ZT轴垂直于当地水平面向上,XT、YT和ZT组成右手坐标系。舰船地理坐标系是以舰船摇摆中心为原点的直角坐标系,坐标系中点的坐标用(xT,yT,zT)表示。
1.2 舰船甲板坐标系
舰船甲板坐标系O-XBYBZB的原点O位于舰船摇摆中心,YB轴平行于舰船艏艉线指向舰艏,XB轴垂直YB轴且平行于甲板指向舰船右舷,ZB轴垂直甲板向上,XB、YB和ZB组成右手坐标系。舰船甲板坐标系是以舰船摇摆中心为原点的直角坐标系,坐标系中点的坐标用(xB,yB,zB)表示。
1.3 坐标系转换
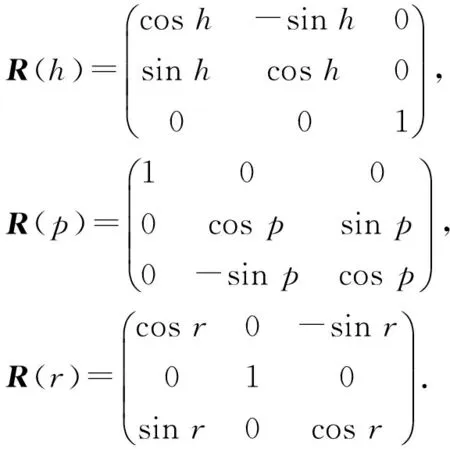
舰船地理坐标系O-XTYTZT和舰船甲板坐标系O-XBYBZB的原点都位于舰船摇摆中心,从舰船地理坐标系转换到舰船甲板坐标系只需要进行角度的旋转,按先航向、再纵摇最后横摇的变换顺序进行。即舰船地理坐标系经由航向变换矩阵R(h),纵摇变换矩阵R(p),最后由横摇变换矩阵R(r)转换到舰船甲板坐标系。
其中,
联系人: 白玉栋E-mail: baiyudong2003@126.com

(1)


(2)
甲板坐标系到地理坐标系表示为
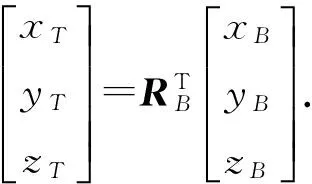
(3)
2 测量误差分析
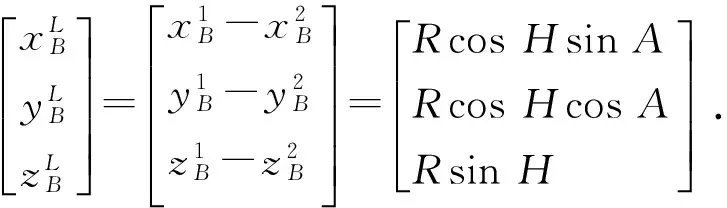
(4)

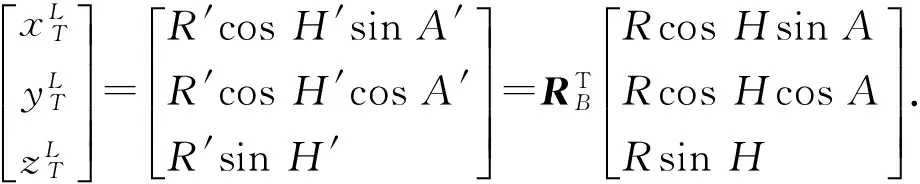
(5)

Q=A′-h

(6)
由式(6)可知,双天线航向测量系统航向测量误差与航向无关,与舰船纵横摇、天线架设位置相关。为研究舰艇姿态和天线架设位置对测量误差的影响,对单独存在水平架设偏差、垂直架设偏差时受纵摇、横摇影响及单独存在横摇、纵摇受水平架设偏差、垂直架设偏差情况进行仿真分析,结果如图1~图4所示。
A=5°,H=0°,横摇范围为-20°~20°,纵摇范围为-30°~30°,误差分布如图1所示;A=0°,H=5°,横摇范围为-20°~20°,纵摇范围为-30°~30°,误差分布如图2所示。分析可知:水平架设偏差带来的测量误差受舰船纵摇影响较横摇影响大;垂直架设偏差带来的测量误差受横摇影响较纵摇影响大。
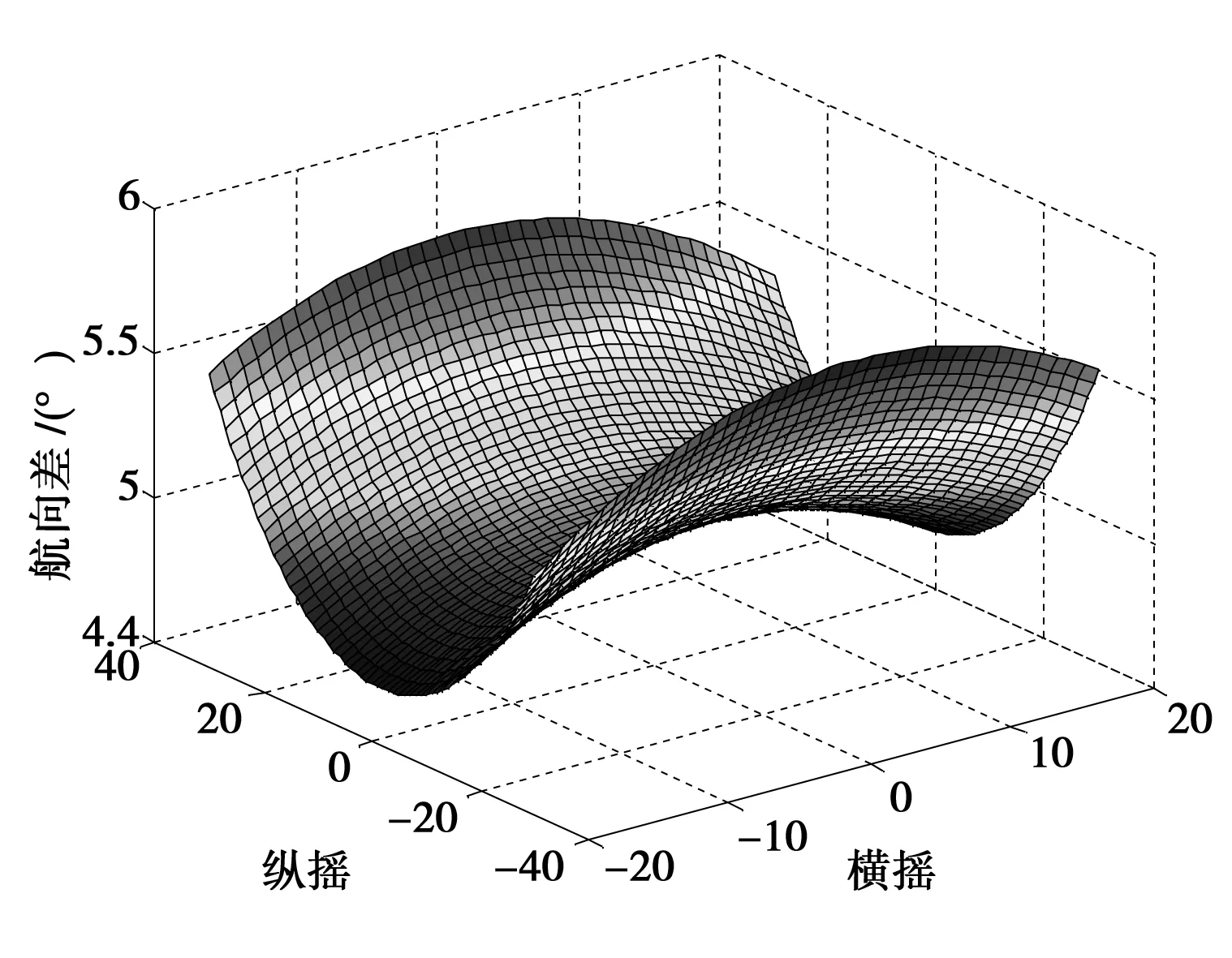
图1 A=5°,H=0°航向误差与纵横摇关系
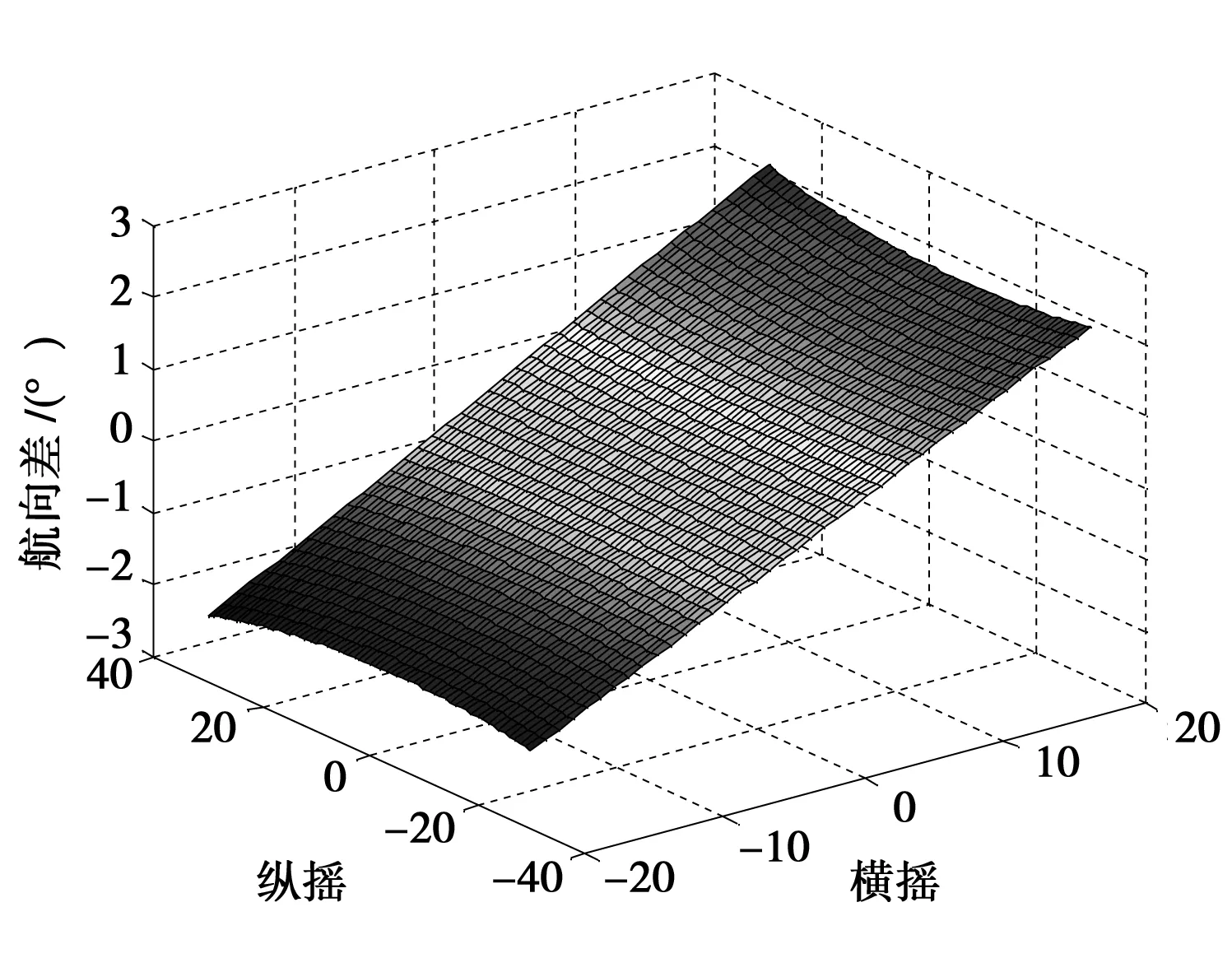
图2 A=0°,H=5°航向误差与纵横摇关系
r=5°,p=0°,架设位置A为-20°~20°,H为-30°~30°,误差分布如图3所示;r=0°,p=5°,架设位置A为-20°~20°,H为-30°~30°,误差分布如图4所示。分析可知:舰船横摇带来测量误差受水平架设偏差影响较垂直架设偏差影响大;舰船纵摇带来测量误差受水平架设偏差影响较垂直架设偏差影响大。
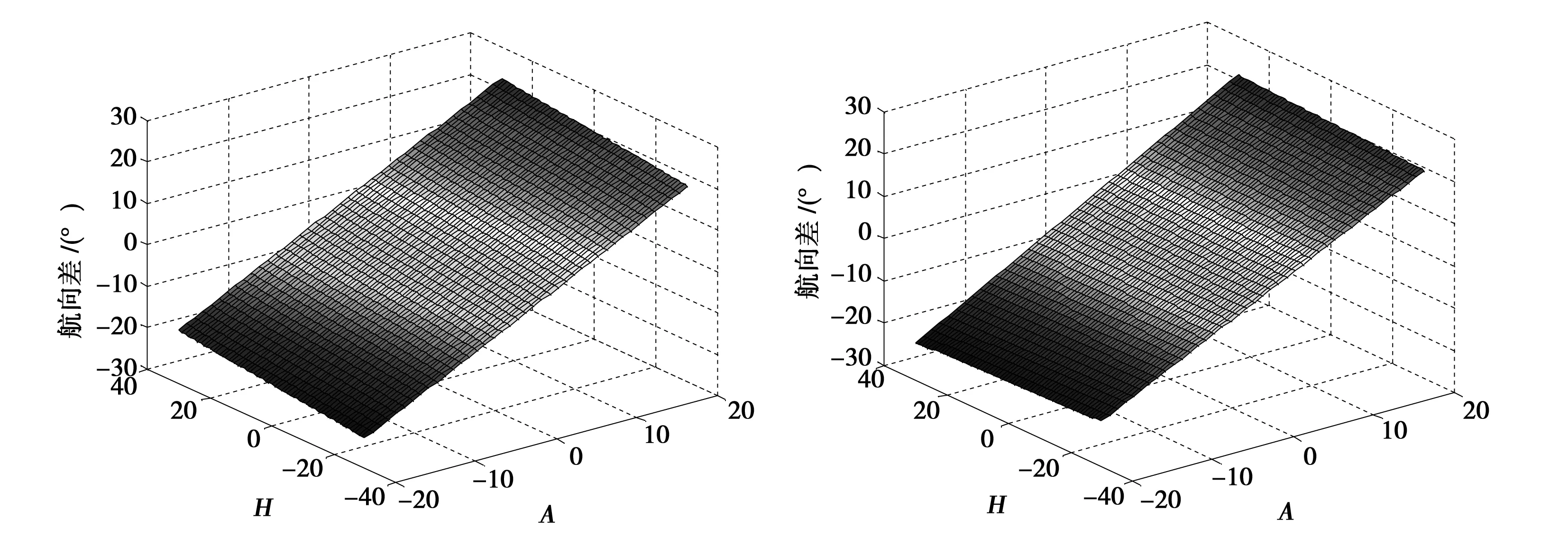
图3 r=5°,p=0°航向误差与天线位置关系 图4 r=0°,p=5°航向误差与天线位置关系
3 试验数据处理
对某型舰船导航艏向角零位检查试验中,双天线航向测量系统作为真值测量设备,数据率10 Hz,输出航向测量值A′,艏艉天线架设在艏艉线标志位上,艏艉线标志位甲板水平距离107 m,高差-4.28 m; 惯导输出舰船姿态信息r,p,h″,数据率40 Hz,按照时间对齐,由式(7)计算出同一时刻惯导航向h″与约定真值h之差Δh,作为惯导航向对准试验的统计量,实现在动态条件下惯导艏向角零位对准。其中,A′、r,p,h"为测量值,Q为根据公式(6)计算出的航向测量误差。
Δh=h"-h=h"-(A′-Q) .
(7)
图5为部分时间段试验测量数据及处理数据曲线,表1为试验期间数据处理结果。
图5(a)为试验期间惯导航向测量值h″和双天线测量系统航向测量值A′;图5(b)显示动态条件下横摇动态范围大于纵摇动态范围,本次试验测量天线架设只有垂直架设偏差,横摇对测量误差起到主要作用; 图5(c)示出了航向修正值范围在-0.009~0.004之间,而双天线航向测量精度为0.002°,由天线架设偏差和纵横摇带来的航向测量误差超出双天线设备本身的测量误差,必须要进行航向修正,才能提高真值的准确度。表1结果显示,利用测量误差模型修正后的数据进行统计,惯导航向对准数据随机差要比未修正前随机差小,在一定程度上提高对准精度。
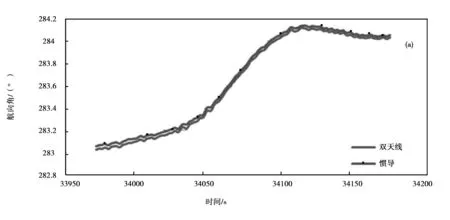
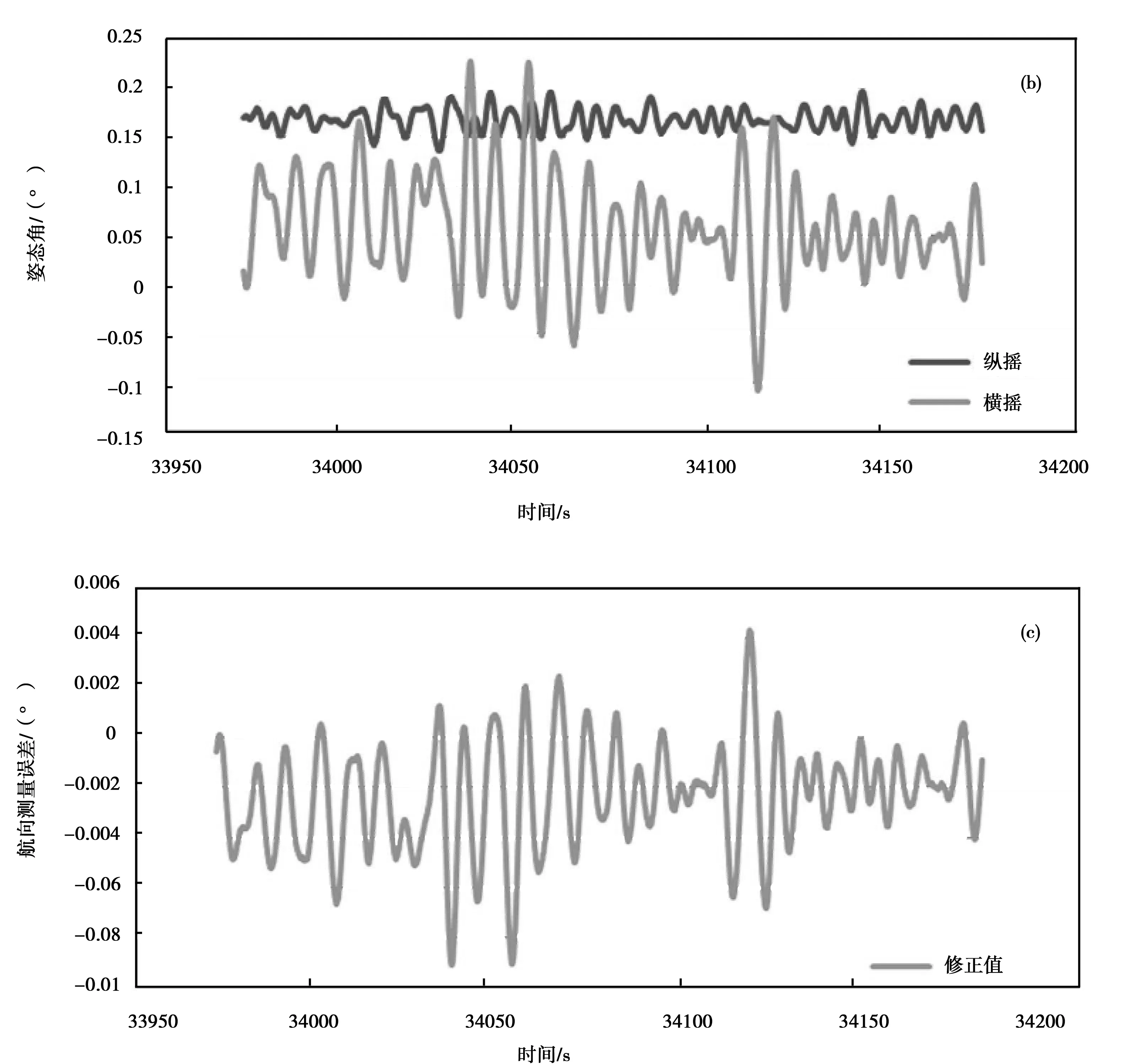
图5 测量值及处理结果 (a)惯导与双天线设备航向测量数据; (b)惯导纵横摇测量数据; (c)双天线设备测量误差

样本量惯导航向测量值与双天线测量值比较惯导航向测量值与约定真值比较系统差随机差系统差随机差345770.019787°0.005199°0.020233°0.004357°
4 结束语
本文通过分析双天线安装偏差导致的动态条件下航向测量误差,利用惯导设备输出的纵横摇信息,依据推导的测量误差公式对测量结果进行修正,得出惯导航向测量值与航向约定真值的差值作为统计量,在舰船艏向角零位对准试验中能够提高检测精度,满足试验要求。同时,舰船形变及惯导输出的纵横摇精度对测量影响未作考虑,在后续研究中需进一步完善。
[1] 刘星,付永杰,闫道广,等.军事装备试验计量技术与管理[M].北京:国防工业出版社,2005.
[2] 郑梓祯,蔡迎波,王海波,等.舰船导航系统试验与鉴定[M].北京:国防工业出版社,2005.
[3] 鸿巍,信冠杰,王红波,等. 单基线GPS动态航向测量与误差分析[J].中国惯性技术学报,2009,17(6):706-709.
[4] 李维林,李蕾,唐伟方. 基于GPS测量系统的舰载作战系统动态航向对准技术研究[J].中国舰船研究,2009,4(4):68-71.
[5] 彭晓刚,吕志平,张高巍. 修正GPS测量舰船航向误差的环境建模法[J].海洋测绘,2007,27(4):41-43.
[6] 周志恒,赵建军,桑德一,等.舰艇姿态对作战系统动态对准精度的影响分析[J].兵工自动化,2016,35(5):51-55.
[7] 王佳,王海波,陈荣娟,等.舰艇真航向动态测量方法中舷角德误差修正及仿真[J].舰船科学技术,2013,35(9):66-70.
猜你喜欢
军事文摘(2022年14期)2022-08-26
舰船科学技术(2022年10期)2022-06-17
红领巾·萌芽(2022年3期)2022-03-13
新世纪智能(高一语文)(2021年3期)2021-07-16
云南画报(2020年12期)2021-01-18
新世纪智能(数学备考)(2020年9期)2021-01-04
金桥(2020年10期)2020-11-26
民用飞机设计与研究(2019年4期)2019-05-21
微电机(2019年12期)2019-03-26
电子制作(2017年24期)2017-02-02
