
基于GPS/北斗网络RTK算法实现与结果分析
2017-02-05 11:29杜文选严超徐炜王涛
全球定位系统 2017年6期
杜文选,严超,徐炜,王涛
(安徽理工大学 测绘学院,安徽 淮南 232001)
0 引 言
随着卫星定位技术在各个领域的广泛应用,其作业方式也在发生着巨大的变革,从单点定位扩展到广域差分,从事后处理到实时定位与导航,其目的就是为了提高定位精度和应用范围[1]。全球卫星导航系统(GNSS)精密实时动态(RTK)相对定位,通过对接收机间和星间做差消除卫星轨道误差、大气传播延迟误差以及卫星和接收机钟差等误差源,再利用高精度的载波相位观测量,可以实现厘米级甚至毫米级精度的定位[2]。随着互联网的高速发展,区域和世界范围内的信息和数据交流已变得相当容易,由此由多基站构成网络的GNSS服务体系成为GNSS技术发展的最新趋势。其中虚拟参考站(VRS)技术由于覆盖范围广、定位精度高、可靠性高等优点成为目前最流行的一种网络RTK技术[3]。
1 单基站RTK基本原理
单基站RTK由一个连续运行基准站,无线发射装置、移动站三部分组成。连续运行基准站通过软件实时向广域网播发差分信息。移动站通过GPRS、CDMA网络通讯方式与基准站服务器进行通讯,通过获得的差分信息进行相对定位,获取当前位置[4]。
GNSS接收机一般会获取伪距观测值与L1(B1)和L2(B2)载波相位观测值;
伪距观测值模型为

(1)
载波相位的观测值模型为
Ns+ε,
联系人: 杜文选 E-mail: 13685542895@163.com
载波相位双差模型为
(3)
式中:A为基准站与B为移动站同时观测参考卫星i及非参考卫星j. 可见,在测站和卫星的双差观测值中,接收机钟差、卫星钟差的影响已基本消除,对流层和电离层的影响得到进一步削弱[5]。
基准站A的天线相位中心坐标为(XA,YA,ZA)为已知值,设移动站B天线相位中心的近似坐标为(XB0,YB0,ZB0),其改正数为(δX2,δY2,δZ2),双差观测方程的线性化形式可写为
[δXBδYBδZB]T-
(4)
lj=
ρAj-ρBi+ρAi).
(5)
基准站A和流动站B对同一组卫星进行观测,卫星数为n,那么相应的误差方程组为
V=AδX+l,
(6)
其中:
A=
(7)

(8)
δX=[δXBδYBδZB]T.
(9)
由最小二乘解算得出:
δX=-(ATPA)-1ATPL.
(10)
最后,由移动站近似坐标加改正坐标得出真值坐标。
2 多基站RTK定位原理
单基站RTK随着基线距离的增加,对流层和电离层误差的影响会变得越来越大,双差改正的效果会越来越弱,使得定位精度大大降低。多基站RTK又称网络RTK技术,目前,VRS、FKP、MAC、CBI、ARS以及联合单参考站差分解算技术是国内外主流的网络RTK技术[7]。其中VRS技术是当前网络RTK最常用的技术,能够有效克服单基站RTK存在的缺陷,使用户能够在较大空间范围内获得均匀,高精度可靠的定位结果。
基于VRS的网络RTK技术,各个固定参考站不直接向移动用户发送任何改正信息,而是将所有的原始数据经过数据通讯链路发送至数据处理中心,移动站将其概略坐标(由伪距单点定位获取)发送至控制中心,数据管理中心收到位置信息后会播发一组固定最佳的参考站,利用他们的数据在用户位置附近模拟出一个虚拟参考站,与移动站形成超短基线[8]。将整体改正GPS轨道误差、电离层、对流层以及大气折射等误差后的高精度差分信号发送给移动站,从而获得高精度定位结果。
VRS的实现一般需要以下流程:
假定U表示流动站所在位置,V表示虚拟参考站VRS位置,A为主参考站所在位置,则主参考站A与虚拟参考站V之间的站间双差观测方程为[9]
(11)
由于A、V的坐标已知,主参考站A与虚拟参考站V间几何距离双差可直接计算,与分别为对流层与电离层误差,可以通过基准站网对应误差内插得到;VRS系统的关键是内插参考站处双差综合误差和生成虚拟站观测值[10]。
虚拟参考站V与流动站P之间的站间双差观测方程为
(12)
由于虚拟参考站与流动站之间的距离很短,两测站与距离相关的双差误差残差可以认为是相等的,即:
(13)
(14)
联立方程(11)与方程(12)可得:
(15)
可根据相对定位模型进行定位。VRS技术实现流程如图1所示。

图1 VRS技术实现流程图
3 实验分析
3.1 单基站定位实验分析
实验采用2017年06月06日06时至07时香港卫星定位参考基准网观测数据已知基准点的观测数据,以HKPC为基准站,选取的流动站HYC1,距离基准站3.966km.采用GPS/BDS双系统双频观测数据,时段长为30min,采样间隔为1s,利用编写的基于C++平台的算法研究测试程序进行数据处理以及定位结果分析,将定位结果与静态测量坐标比较得到WGS-84坐标系下HYC1点在X,Y,Z三个方向上的坐标差值,如图2所示。

图2 单基站RTK短基线定位三轴误差及均方根值(RMS)
实验得出基线长度为3.966 km的单基站RTK定位RMS可以达到厘米级定位,与静态测量后处理定位坐标相比在X,Y,Z三个方向上的方向偏差可以达到厘米级。程序采用单历元结算模糊度,由于观测噪声的原因,部分历元发生跳跃。
另选取HYC1、HKLM、HKSC、HKOH、HKST与HKTK点为流动站,以HKPC为基准站,分别选取三次观测数据进行计算,获取三次计算平均坐标,得到计算结果与静态测量坐标比较结果如表1所示。
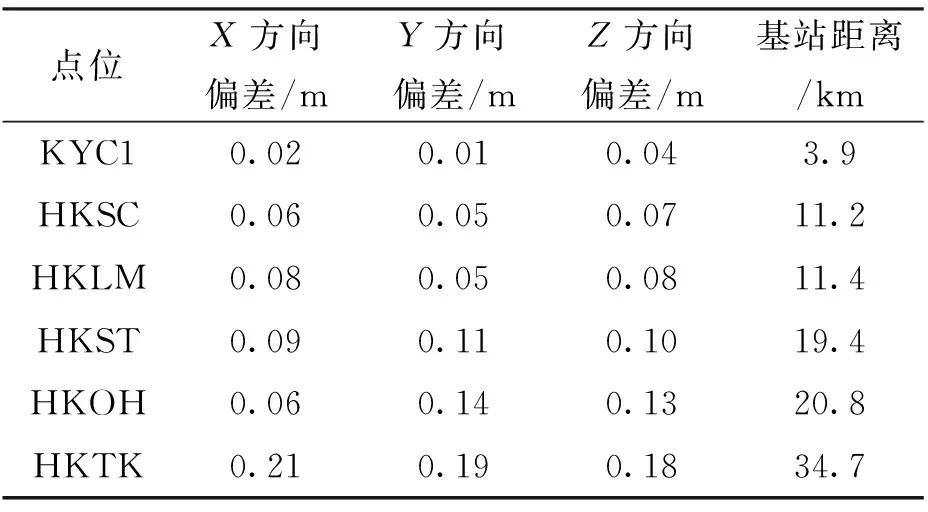
表1 测试点坐标测量统计表
由表1可知在测量基线较短(<15 km)情况下,单基站RTK测量结果与静态测量结果比较,在WGS-84坐标系下三轴方向偏差能够达到10 cm以内,但随着基线的增加,在对流层和电离层等其他误差的影响下测量误差不断增加,系统仍然可以进行RTK测量,但精度已经无法达到要求,只能进行分米级定位测量。
3.2 多基站定位实验分析
本实验采用2017年06月06日10时至11时香港卫星定位参考基准网观测数据已知基准点的观测数据,分别选取HKCL、HKTK、HKKS三个站点构成基准参考站网,选择HKST站点为流动站,距离基准站30.5 km,采用GPS/BDS双系统双频观测数据,时段长为1 h,采样间隔为1 s,进行数据处理及定位结果分析。
VRS基准站网参考站间首先采用双频线性组合法固定站间双差宽巷模糊度,然后根据L1(B1)、L2(B2)的无电离层组合求出L1(B1)或L2(B2)的基频双差模糊度[11]。
参考站HKCL和参考站HKKS距离42.399 km,由图3可以得出,两基准站之间双差宽巷模糊度由双频线性组合法得到C3号卫星与基准卫星间的双差宽巷模糊度为-65周,而C3号卫星与基准星B1频双差模糊度采用无电离层组合法成功固定,双差模糊度为7周,以此计算由大气等因素产生的基准站间误差,从而进一步计算虚拟观测值的改正误差。
采用双差模型可以极大地消弱电离层和对流层误差,但随着基线长度的增加,双差改正的效果会越来越弱,而选用VRS算法,通过基准站间的对流层和电离层误差来内插出虚拟参考站与主参考站间的对流层和电离层误差,通过改正可以消除或减弱虚拟参考站与主参考站间误差,生成更加准确的虚拟观测值。如图4所示,分别为双差对流层误差残差和双差电离层误差残差,电离层抖动变化与当地时间有密切联系。

图4 C3号卫星双差对流层误差和双差电离层误差
将定位结果与静态测量坐标值比较,可以得到X、Y、Z三个方向的方向偏差如图5所示。
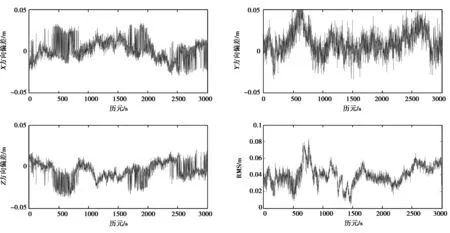
图5 多基站RTK解算三轴方向偏差与RMS值
将基准站间的对流层和电离层误差内插出虚拟参考站与主参考站间的综合误差,剔除粗差后生成的虚拟观测值与流动站的观测数据构成误差观测方程,通过实验计算结果可以看出,当流动站与基准站相距30.5 km时RMS值可以达到厘米级,且多基站网络RTK计算结果与静态测量坐标偏差不超过10 cm,如图5所示。当基线的长度超过一定距离时,单基线RTK由于双差模型对电离层和对流层的改正效果变差,定位精度下降,如表1所示,而对于多基站RTK通过对电离层和对流层的改正,使定位精度得到了提升,可以达到厘米级定位精度。
4 结束语
本文通过使用实际观测值数据计算单基站与多基站RTK的定位结果,分析得出当流动站与基准站构成较短基线时,直接进行相对定位可以得到厘米级定位结果,但随着基线距离的增长,双差模型对电离层和对流层的改正效果变弱,此时单基站网络RTK会得到较差结果,而多基站网络RTK利用VRS算法可以有效地改正误差,即使流动站与参考站构成中长基线也会快速得到厘米级定位结果,在快速定位工作中极大地提高了工作效率,满足工作的精度需求。
[1] 余学祥,王坚,刘绍堂,等.GPS测量与数据处理[M].北京:中国矿业大学出版社,2013.
[2] 宁津生,姚宜斌,张小红.全球导航卫星系统发展综述[J].导航定位学报,2013,1(1):3-8.
[3] 潘树国,王庆,王慧青.基于VRS的GPS实时差分研究及测试[J].电子测量与仪器学报,2006,20(6):21-25.
[4] 郑廷隆.单基准站RTK GPS实时定位基本原理及应用[J].吉林地质,2010,29(1):150-152.
[5] 谢建涛,郝金明,邱璇,等.GPS/VRS对流层延迟误差内插模型研究[J].测绘与空间地理信息,2013,36(2):127-129.
[6] 魏瑞娟,李学军,任维成,等.单基站CORS的建设与应用研究[J].测绘通报, 2010(6):23-26.
[7] 王静,赵兴旺,刘超,等.基于正则化的GPS/BDS单频单历元模糊度固定[J].大地测量与地球动力学,2016(12):1083-1087.
[8] 唐文杰,吕志伟,王兵浩,等.基于北斗CORS的网络RTK定位精度分析[C].//中国卫星导航学术年会,2015.
[9] 吕志伟.基于连续运行基准站的动态定位理论与方法研究[D].郑州:解放军信息工程大学,2010.
[10]李成钢,罗小军,王长委,等.基于Ntrip的Beidou/GPS双模网络RTK服务性能研究[C].//中国卫星导航学术年会,2014.
[11]祝会忠,徐爱功,高猛,等.BDS网络RTK中距离参考站整周模糊度单历元解算[J].测绘学报,2016,45(1):50-57.
猜你喜欢
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年4期)2021-08-30
中国农业文摘·农业工程(2020年4期)2020-07-24
导航定位学报(2018年3期)2018-09-03
全球定位系统(2018年2期)2018-06-13
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
太空探索(2016年6期)2016-07-10
中国高新技术企业(2015年15期)2015-05-04
