一种用于光伏MPPT的分阶段变步长电导增量法
2017-01-20 09:55吴雷,杜蘅,徐鹏
电源技术 2016年3期
吴 雷,杜 蘅,徐 鹏
(江南大学电气自动化研究所,江苏无锡214122)
一种用于光伏MPPT的分阶段变步长电导增量法
吴 雷,杜 蘅,徐 鹏
(江南大学电气自动化研究所,江苏无锡214122)
针对传统的光伏系统最大功率点控制算法跟踪精度和速度不能兼顾的问题,提出一种分阶段变步长电导增量法。该算法将光伏电池输出曲线划分为两阶段,根据不同阶段的曲线特性分析比较,从而进行步长模式的切换,在远离最大功率点的动态阶段采用大步长跟踪,而在最大功率点附近的稳态阶段则采用小步长跟踪。仿真结果表明,该方法快速跟踪到最大功率点,且有效降低了系统最大功率点附近的振荡,提高了光伏电池的利用效率。
光伏阵列;最大功率点跟踪;变步长;电导增量法
太阳能是一种清洁无污染的能源,而作为光电转换“媒介”的光伏电池其输出具有典型的非线性特性。此外,光伏电池的输出也极易受到外界环境变化的影响,因此对于最大功率点跟踪(MPPT)的研究具有重要意义[1]。
目前国内外已经提出了多种MPPT控制策略,最为典型的有:扰动观察(P&O)法、电导增量(INC)法、固定电压(CV)法和固定电流(CC)法等[2-4]。固定算法控制简单,但是精度不够。扰动观察法和电导增量法相比固定算法精度上有所改善,但是在步长选取上也难以兼顾跟踪精度和速度[5]。基于此,文献[6]根据光伏电池输出曲线的特性,提出了一种变步长电导增量法,在该方法中步长系数N决定了MPP的跟踪效果,但是由于值的不确定性,调整适合特定光伏系统的步长系数N比较繁琐而且复杂。
本文基于光伏电池等效电路及数学模型,在Matlab/Simulink搭建了光伏电池的仿真模型,将实际光伏电池产品参数带入并进行仿真,在此基础上深入分析光伏电池在不同阶段的输出特性曲线,提出了分阶段变步长最大功率点跟踪控制策略。利用仿真系统对分阶段变步长电导增量法和传统电导增量法在外界环境条件突变情况下的MPPT分别进行了仿真,并且对这两种算法在动态过程和稳态过程的仿真结果进行了深入的对比性分析。
1 光伏电池输出特性
根据文献[7]光伏电池的等效电路如图1所示。

图1 光伏电池等效电路
由图1,根据基尔霍夫电流定律可得[8]:

本文使用的光伏电池模型参数基本按照电池组件Solarex MSX60 60W所提供的参数进行设置。光伏电池在不同光照、温度下的仿真结果如图2所示,可知光伏电池的输出特性曲线呈现非线性关系,且在不同外界环境条件下最大功率点有所不同。
2 分阶段变步长电导增量法
2.1 电导增量法基本思想
从图2的P-U曲线中可以看出,在最大功率点时P-U曲线的斜率为零,从而可以推出公式(2)。

图2 光伏电池P-U曲线

即:

电导增量法正是最终通过式(3)来判断系统是否工作在最大功率点,当时,系统工作点在最大功率点,保持当前电压不变;当时,此时应增大当前工作点电压;当时,此时应减小当前工作点电压[10]。
电导增量法相比其他传统控制算法,提高了系统的跟踪精度。但电导增量法步长的选取会影响到跟踪效果,步长选取过小,提高了跟踪精度,却降低了跟踪速度,若步长选取过大,则反之。
2.2 分阶段变步长控制策略分析
如图3所示,以最大功率点(MPP)为分界点将光伏电池特性曲线分为A-B、B-C两阶段分别来讨论。在光伏电池特性曲线的A-B段得到如图4所示的输出特性曲线。

图3 光伏电池输出特性曲线

图4 光伏电池A-B阶段输出特性曲线

将式(2)代入式(4)得:

即:



图5 A-B阶段不同区间划分


图6 光伏电池B-C阶段输出特性曲线


图7 B-C阶段不同区间划分
综上所述,可通过式(13)来切换最大功率点跟踪步长模式。
算法流程图如图8所示。
3 仿真验证
为了验证本文提出的MPPT控制算法的有效性,在Matlab/Simulink软件下对传统电导增量法和提出的分阶段变步长电导增量法进行了仿真比较分析。主电路选择Boost DC/DC变换电路,光伏电池模型标准条件下的参数=60 W,最大功率点电压和电流分别为=17.1 V,=3.5 A,开路电压=21.1 V,短路电流=3.8 A。系统采样周期=0.000 5 s,开关频率=20 kHz。光伏电池温度设置为=25℃,光照设置为每0.2 s变化一次,由初始光照1 000 W/m2逐渐递增到2 000 W/m2,之后再逐渐递减回1 000 W/m2。两种算法的仿真结果如图9所示。
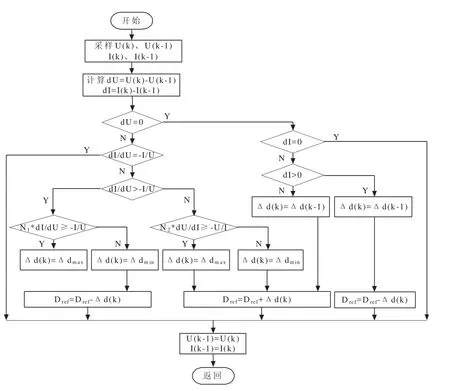
图8 算法流程
图9 (a)~(c)分别为随着光照变化,不同算法控制下光伏电池功率变化波形;图9(d)展示了变步长算法的步长变化情况。可以看出,在启动和光照突变的动态过程中,系统工作点远离最大功率点,变步长算法采用大步长跟踪,在最大功率点附近的稳定阶段则保持小步长跟踪;图9(e)展示了在=25℃,= 1 000 W/m2情况下的动态阶段,变步长、固定大步长电导增量法在=0.02 s前跟踪到MPP,而固定小步长电导增量法在=0.12 s后才跟踪到MPP。图9(f)展示了在=25℃,=1 500 W/m2情况下的稳态阶段,变步长、固定小步长电导增量法较平稳地跟踪MPP,而固定大步长电导增量法在MPP附近有3 W左右的振荡。仿真结果表明,本文提出的分阶段变步长电导增量法对比传统电导增量法在MPPT上具有优势。
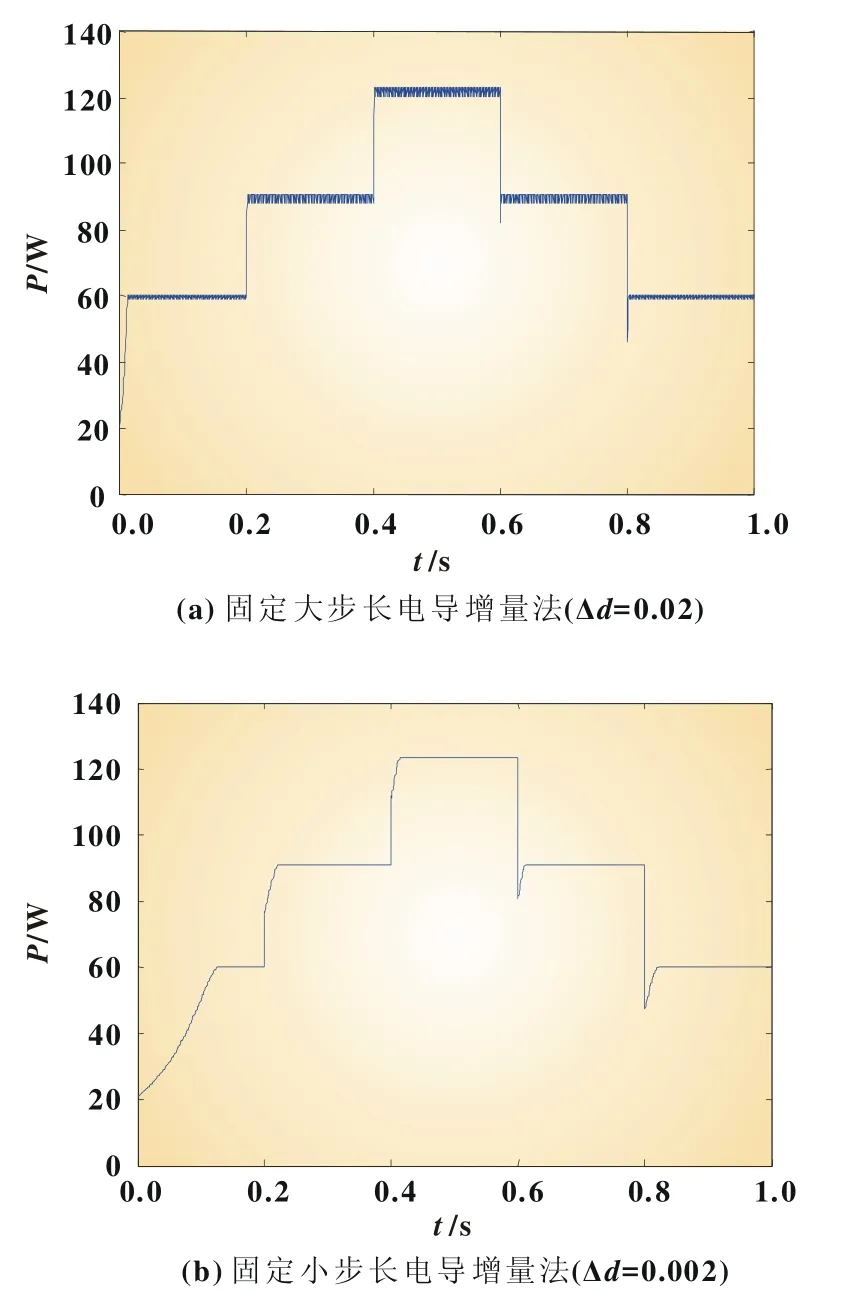
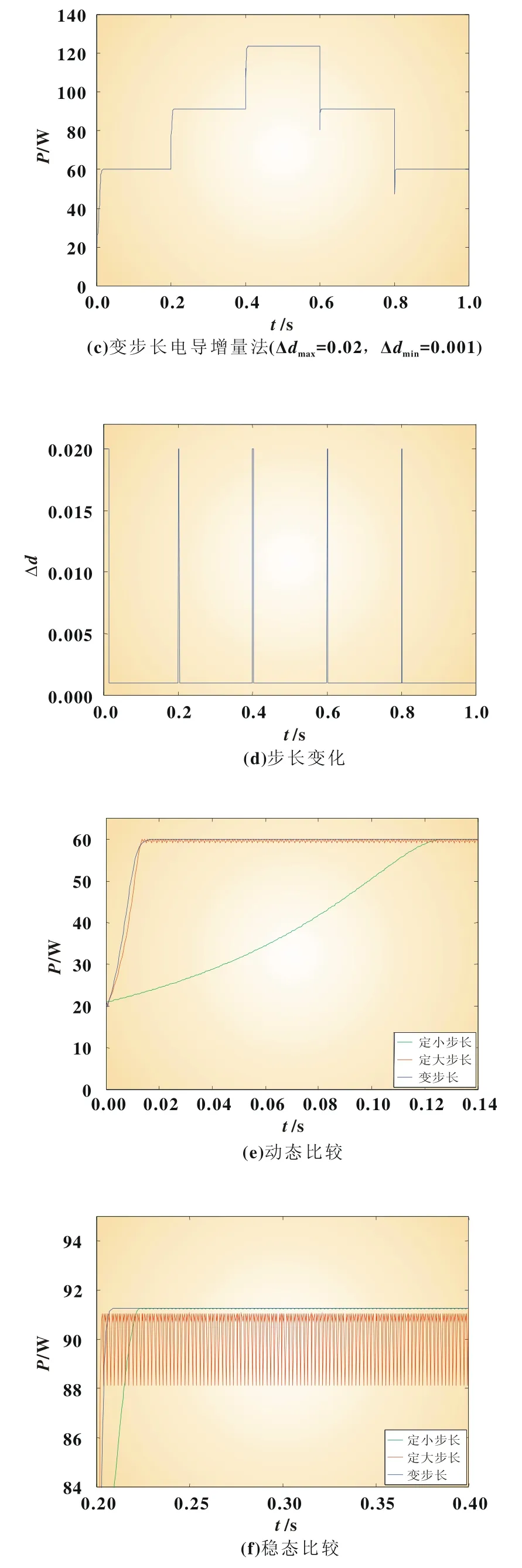
图9 仿真结果
4 结论
[1]黄舒予,牟龙华,石林.自适应变步长MPPT算法[J].电力系统及其自动化学报,2011,23(5):26-30.
[2]QUOC D P,NHAT Q N,PHUONG L M,et al.The new combined Maximum Power Point Tracking algorithm using fractional estimation in photovoltaic systems[C]//Power Electronics and Drive Systems(PEDS),2011 IEEE Ninth International Conference.US:IEEE,2011:919-923.
[3]刘琳,陶顺,郑建辉,等.基于最优梯度的滞环比较光伏最大功率点跟踪算法[J].电网技术,2012,36(8):56-61.
[4]吴俊娟,姜一达,王强,等.一种改进的光伏系统MPPT控制算法[J].太阳能学报,2012,33(3):478-484.
[5]杨永恒,周克亮.光伏电池建模及MPPT控制策略[J].电工技术学报,2011,26(1):229-234.
[6]LIU F R,DUAN S X,LIU F,et al.A variable step-size INC MPPT method for PV systems[J].IEEE Transactions on Industrial Electronics,2008,55(7):2622-2628.
[7]张厚升,赵艳雷.多项拟合的光伏电池阵列模拟器研究与设计[J].电力自动化设备,2012,32(2):109-113.
[8]MARIUS P,JAN C G,BENEDIKT B.Efficiency limit and example of a photonic solar cell[J].Applied Physics,2011,18(8):431-433.
[9]黄勤,赵靖,凌睿,等.基于改进变步长电导增量法的MPPT控制[J].计算机工程,2013,39(2):245-249.
[10]李国友,刘立刚.光伏系统最大功率点跟踪控制算法[J].电源技术,2011,35(12):1534-1536.
Staged variable step size INC MPPT method for PV system

Aiming at the problem that photovoltaic Maximum Power Point Tracking(MPPT)control algorithms could not balance between tracking speed and accuracy,a staged variable step size incremental conductance algorithm was proposed.The output characteristic curve of photovoltaic cell was divided into two stages for analysing.Through the analysis and comparison of performance characteristics of different stage,the step model was switched to chose suitable step size for photovoltaic cell different operation stage.Simulation results show the algorithm can track MPP quickly and reduce the oscillations around the MPP,and improve the utilization efficiency of the photovoltaic cell.
photovoltaic array;maximum power point tracking;variable step size;incremental conductance
TM914
A
1002-087 X(2016)03-0617-04
2015-08-22
2012年省产学研创新项目
吴雷(1962—),男,江苏省人,副教授,主要研究方向为感应加热电源、新能源发电与控制技术。
猜你喜欢
中华养生保健(2020年2期)2020-11-16
电子制作(2018年14期)2018-08-21
猪业科学(2018年4期)2018-05-19
电测与仪表(2016年24期)2016-04-12
电测与仪表(2016年20期)2016-04-11
中国卫生标准管理(2015年16期)2016-01-20
西南医科大学学报(2016年4期)2016-01-03
中国光学(2015年5期)2015-12-09
散文百家(2014年11期)2014-08-21
现代电子技术(2014年10期)2014-07-19