
欠驱动自适应式捕获装置设计
2017-01-17 05:18刘荣强
哈尔滨工程大学学报 2016年12期
吕 辛,夏 艳,刘荣强
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001;2.中国运载火箭技术研究院战术武器事业部,北京100076)
欠驱动自适应式捕获装置设计
吕 辛1,夏 艳2,刘荣强1
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001;2.中国运载火箭技术研究院战术武器事业部,北京100076)
空间捕获作业是在轨服务的重要组成部分,采用全驱动关节式机械臂进行空间捕获存在结构复杂、质量大等问题。本文针对空间捕获作业的设计要求,提出一种具有折展和抓取功能的欠驱动自适应式空间捕获装置。该装置采用行星传动实现1个驱动源驱动2个关节的转动,该装置包括三个3自由度的欠驱动机械手指,采用4个电机驱动9个关节运动,且对被捕获对象具有自适应能力。介绍了捕获手抓的设计方案、工作原理,建立捕获装置单指的坐标系,对捕获装置进行了运动学分析。最后通过样机捕获实验,验证了该装置能够实现不同外形尺寸目标的自适应捕获。
空间捕获;欠驱动;机械手;自适应性;运动学分析;抓取实验
太空垃圾对航天器的安全构成极大威胁,太空垃圾清理、废弃卫星离轨操作、航天器在轨服务等太空任务都需要对空间目标进行捕获作业[1]。但是现有空间捕获装置都是利用空间机械臂完成的,这类捕获装置需要的驱动关节数量多、结构复杂,对被捕获目标缺少自适应能力,不适用于空间非合作目标捕获。未来空间捕获装置将要求具有远距离抓取能力,可捕获非规则形状物体,对目标具有形状自适应性。欠驱动自适应式空间捕获装置具有广阔的应用前景[2]。
欠驱动机构是指驱动源数少于机构自由度数的一类机构,欠驱动机构具有驱动元件少、控制简单、抓取适应性强和出力大等优点。这种机构具有形状自适应能力,当欠驱动机械手抓取物体时,手指能够完全包络物体,并且能够适应物体的形状。但欠驱动机构的缺点是运动可控性差,需要引入弹簧或阻尼来实现要求的动作顺序。国际上最具代表性的欠驱动机械手爪是加拿大MD ROBOTICS开发的欠驱动机器人手爪SARAH[3-4],该手爪是一个具有10个自由度的三指机械手,但是仅采用两个电机驱动,通过机械限位和弹簧实现无动力关节对被抓取形状的自适应。这类欠驱动机构克服了传统机械手爪由于采用了大量的串联关节,导致结构复杂、控制困难、负载能力差、可靠性低,重量相对也较重等问题。此外,黄海等[5-6]建立了3关节欠驱动手指的动力学模型,并根据刚度要求进行了弹簧选用。耿明超等[7-8]建立了欠驱动并联机构的连续柔度矩阵及其方向刚度模型。目前国内外的多指型欠驱动机械手主要应用于海底探测、人工假手和空间机器人末端操作等领域[9-17]。
目前的欠驱动机械手大多是通过连杆机构来减少机构的自由度,并非真正意义的欠驱动机械手,对目标物体缺乏良好的形状适应能力,本文提出一种可折展多指式卫星在轨捕获装置,由3个3自由度的欠驱动机械手指组成,采用4个电机驱动9个关节运动。具有系统结构简单、驱动电机少、容易控制、装置质量轻、占据空间小、捕获功能可靠、对目标具有自适应性等优点。
1 捕获装置方案及结构设计
本文设计的空间捕获装置是将一维伸展臂固定在本体卫星上,同时伸展臂的另一端与捕获手爪相连接。其中,采用一个根部电机驱动伸展臂的展开,采用电机加柔性索联动方式驱动捕获手爪。该装置执行捕获任务时的流程如图1所示,共分为5个阶段:1)伸展臂带动处于折叠状态的捕获手爪伸向目标;2)当捕获手爪与目标满足一定相对位置时,张开适当的角度;3)捕获手抓在伸展臂的带动下靠近目标;4)捕获手爪自适应地抓取目标;5)被捕获目标随着伸展臂被收回。
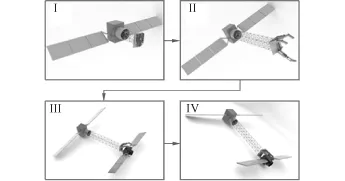
图1 捕获装置捕获目标卫星过程Fig.1 Process of capture device grasping target satellite
1.1 抓取方案
为实现手爪的自适应性,采用如图2所示的外齿圈和系杆未约束式行星齿轮减速器(pla)。太阳轮输入ω1时,外齿圈和系杆同时输出ω2和ω3,则有ω2i-ω3(i-1)=ω1。外齿圈和系杆的输出可以适应环境,当系杆的运动受到限制时,外齿圈可继续转动;当外齿圈的运动受到约束时,系杆可继续运动。可以采用ω2和ω3驱动单个手指的两个关节,实现手指对环境的适应能力。

图2 行星齿轮减速器示意图Fig.2 Diagram of planetary gear reducer
1.2 结构设计
单根手指结构如图3所示,由根部指段、中部指段和顶部指段组成,安装在伸展臂末端基座上。电机1同时驱动本手指和其他手指根部关节回转。行星齿轮减速器固接在根部指段上,电机2通过其将输入动力分配给输出轴1以及输出轴2。在带轮驱动下输出轴1为中部关节传递回转运到的动力。利用两个轴承过渡带轮支承在中部关节轴上,实现自由转动。行星轮输出轴2通过同步带驱动顶部指段回转。行星轮经电机2的输出动力分成两路,同步驱动中部指段和顶部指段。
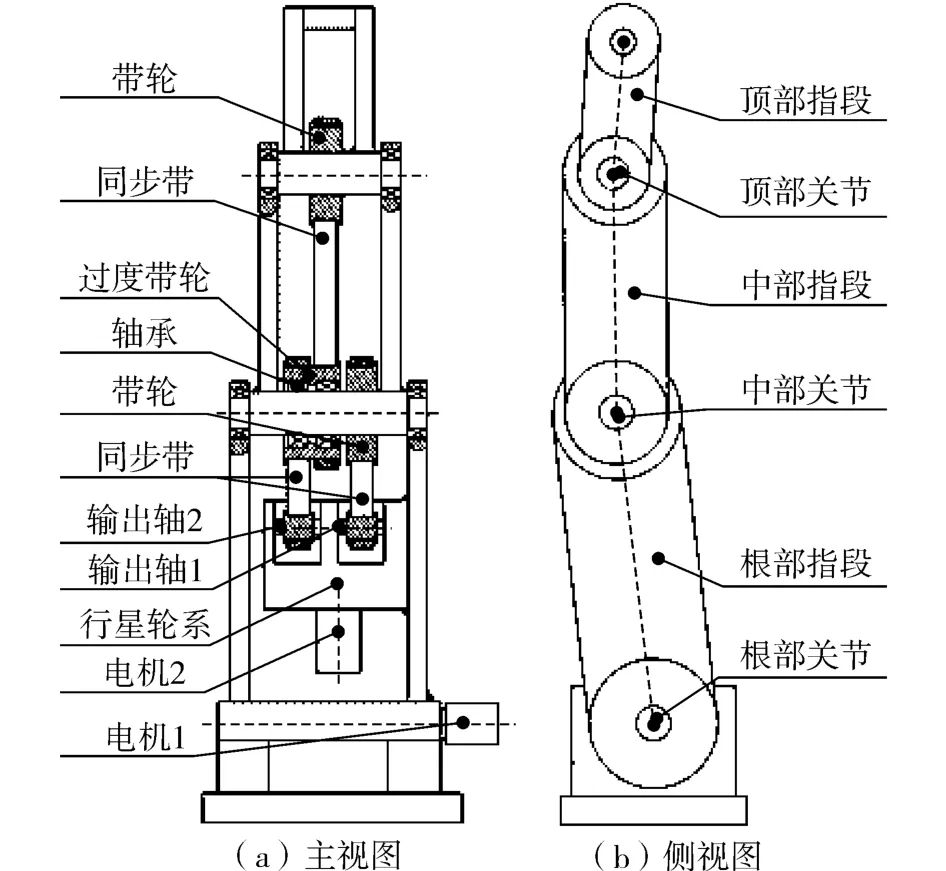
图3 单手指结构示意图Fig.3 Diagram of one finger’s structure
为了实现手指各关节的有序运动,分别在中部关节和顶部关节上设置大小不同的阻尼C2和C3,并且要求阻尼关系满足C3<C2。在无负载情况下,顶部关节由于阻尼值小于中部关节而先发生运动,当顶部关节运动到极限位置后停止运动,此时中部指段在中部关节驱动力矩作用下发生运动,如图4所示。手爪展开运动的动作流程如下:1)电机2工作,经行星齿轮减速器驱动输出轴,由于顶部关节阻尼C3小于中部关节阻尼C2,因此电机2首先驱动输出轴2带动顶部指段逆时针旋转至机械限位;2)顶部指段受机械限位约束停止不动,电机2带动行星齿轮减速器的输出轴1回转,通过带传动驱动中部指段运动到极限位置;3)电机1驱动根部指段逆时针旋转到极限位置,至此三个指段实现了完全展开。
捕获手爪的整体结构如图5所示。捕获手爪包含3个3自由度单手指,由4个电机驱动。其中3个手指的根部指段由1个电机通过同步带驱动,每个手指的中部指段和顶部指段由一个电机驱动,构成欠驱动手指。
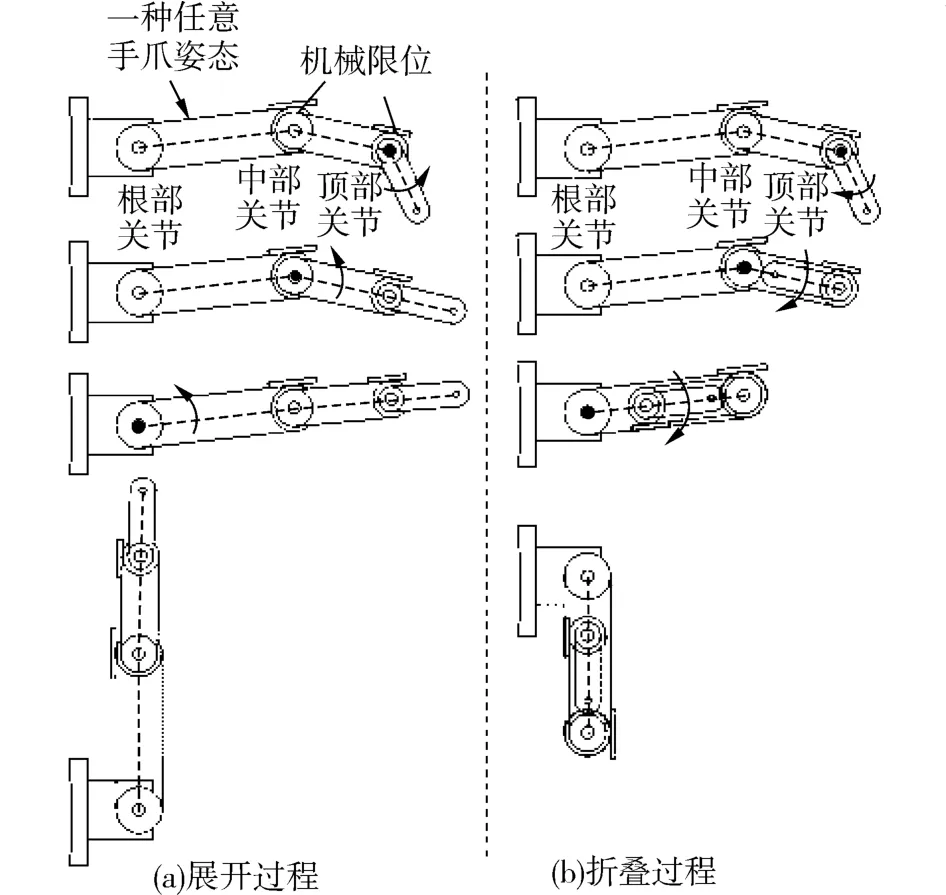
图4 单根手指展开和折叠过程Fig.4 Deploying and folding process for one finger

图5 捕获手爪结构示意图Fig.5 Diagram of the capture gripper’s structure
1.3 工作原理
捕获手爪的抓取过程工作原理如下:首先手爪根据目标外形调整初始抓取姿态,然后电机1通过同步带驱动三个手指的根部指段向内侧同步回转,当接触到目标物体表面时,电机1停止运动。接下来,三个手指上的电机2同时工作,驱动输出轴1和输出轴2运动,由于顶部关节的阻尼小于中部关节,因此先驱动顶部指段进行抓握,当顶部指段接触到目标后停止运动,电机2继续运转,驱动中部指段以相同的旋转方向开始运动直到接触到目标。由于手爪是欠驱动的,最终可以实现各指段都能接触到物体,使捕获手爪完全包络并抱紧目标物体,因此具有对目标物的自适应能力。如图6所示,捕获手爪可抓取方形和球形目标物。
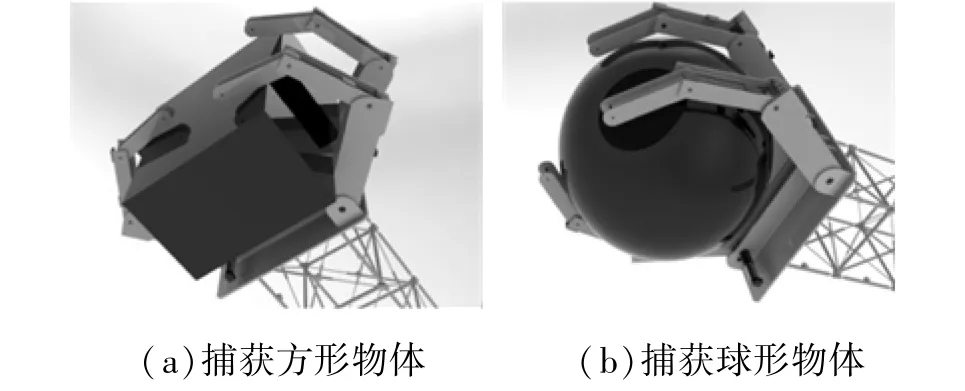
图6 捕获方形物体和球形物体示意图Fig.6 Diagram of capturing the square and spherical objects
2 捕获装置运动学分析
对单个欠驱动手指建立如图7所示的关节坐标系,该手指包括3个平行的回转关节和3个指段,3个指段可简化成3个相互独立的杆件,3个杆件对应的长度分别为li(i=1,2,3)。如图7所示,杆件的扭转角和偏移量均为0,杆件的回转角θi为变量。

图7 捕获装置关节坐标系Fig.7 Joint coordinate system of the capture device
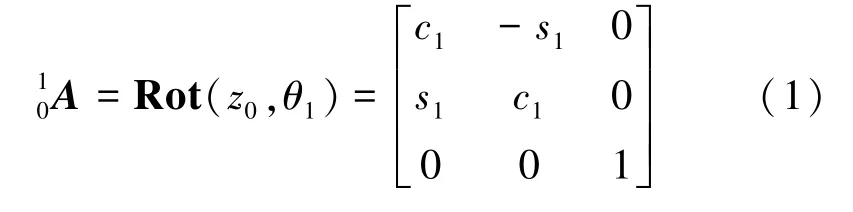
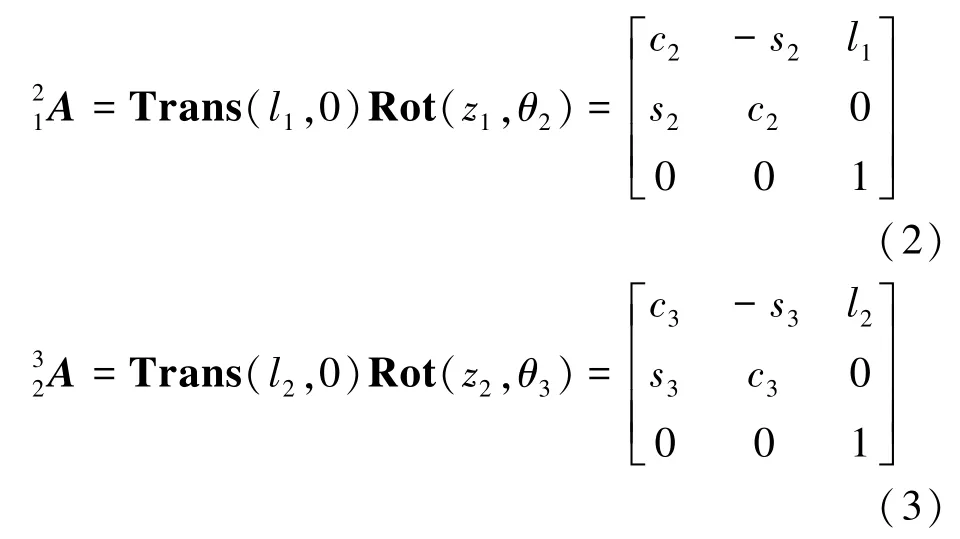
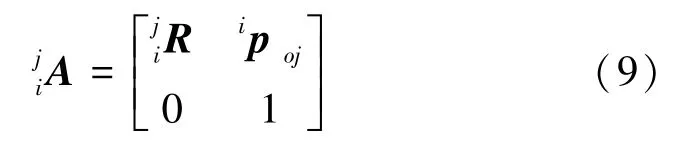
根据各坐标系间的相对位置和回转角度,可运用D-H方法建立两个相邻坐标系之间的变换矩阵:
捕获装置末端姿态可用末端点END在地面坐标系o0-x0y0中的位置向量及顶部指段坐标系o3-x3y3绕地面坐标系o0-x0y0的z0轴的转动角度θ组合构成的笛卡尔广义坐标向量表示:

装置的关节变量可用三个关节的回转角度θi(i=0,1,2,3)构成的向量表示:

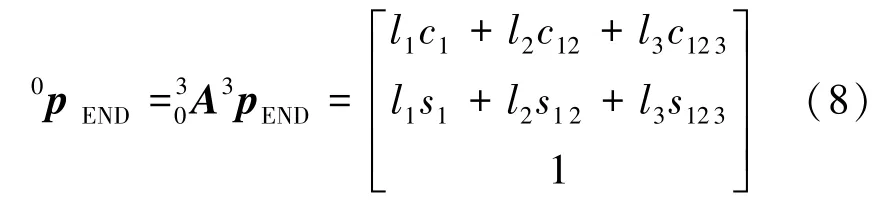
末端点END在顶部指段坐标系o3-x3y3中的位置可表示为

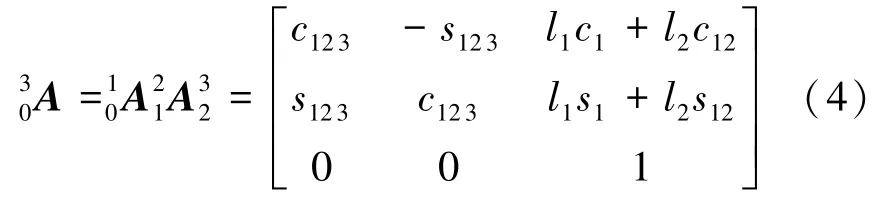
则末端点END在地面坐标系o0-x0y0中的位置为
根据D-H矩阵的元素定义:
可以得到顶部指段o3-x3y3坐标系绕o0-x0y0坐标系的z0轴的转角θ:

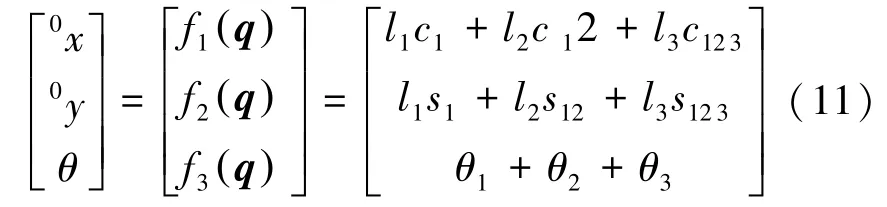
因此可获得装置末端姿态与关节变量的关系,即运动学正解为:p=F( q),即
由于装置末端姿态向量与关节变量向量维数相等,因此存在运动学逆解,通过求解可以得到运动学逆解方程,如式(12),其中


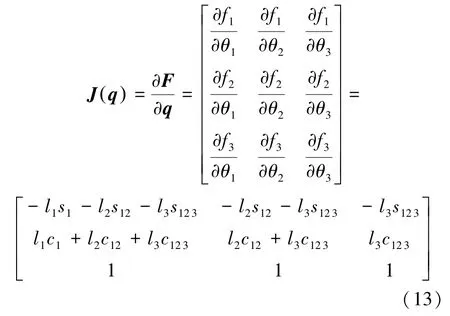
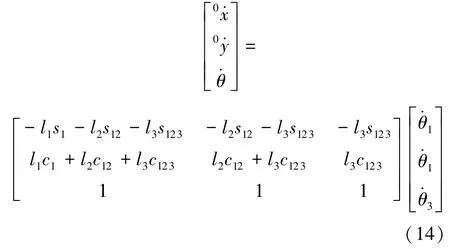
速度雅克比矩阵为
根据上述运动学分析,在机械手折叠过程中,3个关节的角速度均采用匀加速、匀速和匀减速的运动规律,角速度函数定义如式(15)所示。
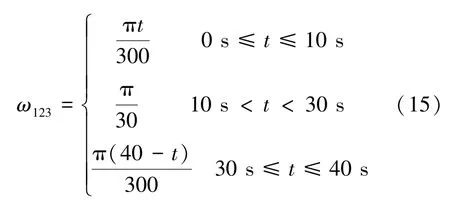
顶部、中部和根部3个指段依次运动,每个指段折叠运动需要40 s,整个手指需要120 s完成折叠运动。将上述运动过程编写MATLAB计算程序,进行手指折叠过程运动学仿真,仿真结果如图8~13所示。图8为手指末端位置随时间的变化曲线,可以看出,末端位置的横坐标0x在折叠过程中由最初的460 mm(展开位置)变化为最终的-160 mm(折叠位置),而纵坐标0y则从最初的0经过3个波段又回到了0,图示的3个波段分别对应3个指段的折叠过程。
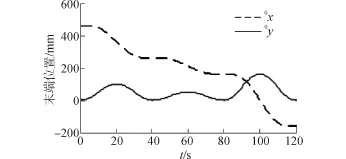
图8 末端位置随时间变化曲线Fig.8 Curves of terminal position changing with time
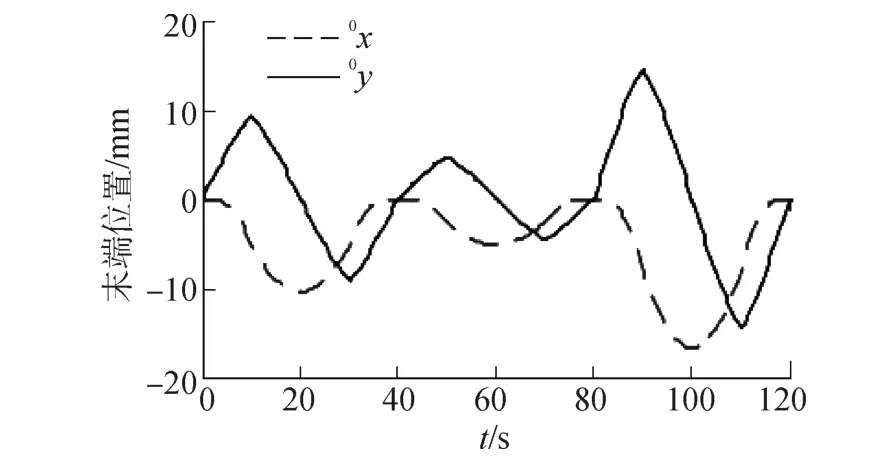
图9 末端速度随时间变化曲线Fig.9 Curves of terminal velocity changing with time
图10为手指折叠过程中末端位置轨迹图,可以看出,该轨迹由3个弧状曲线组成,从左到右分别对应于手指的根部指段折叠、中部指段折叠和顶部指段折叠。
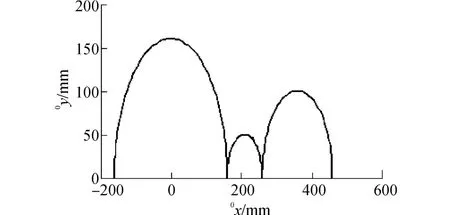
图10 末端位置轨迹Fig.10 Trajectory of the terminal position
在折叠过程中末端速度轨迹曲线如图11所示,呈3个近似椭圆形状,最大的椭圆对应于顶部指段的折叠过程,中间椭圆对应于根部指段的折叠过程,而最小的椭圆对应于中部指段的折叠过程。
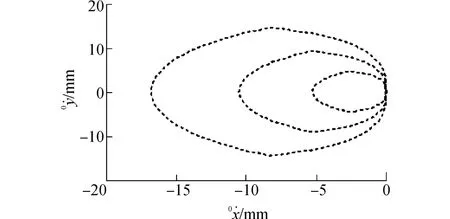
图11 末端速度轨迹Fig.11 Trajectory of the terminal speed
手指末端转角随时间的变化曲线如图12(a)所示,由于末端转角是3个指段转角之和,因此末端转角是随时间逐渐增大的。同样的,末端角速度也是3个指段角速度之和,如图12(b)所示,末端角速度呈现周期性变化特征。
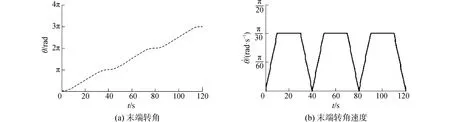
图12 末端转角及角速度随时间变化Fig.12 Curves of terminal rotating angle and angular velocity changing with time
3 单手指捕获实验
为了验证欠驱动捕获手爪的抓取性能,研制了欠驱动单手指实验样机,如图13所示。
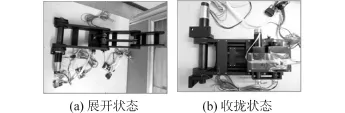
图13 捕获装置单指原理样机Fig.13 Prototype of the capture device with a single finger
对捕获装置主要进行抓取功能性试验。硬件平台如图14所示。
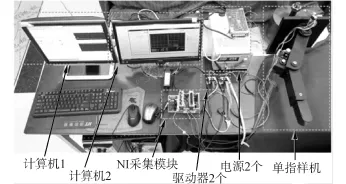
图14 实验系统硬件平台Fig.14 Hardware platform of the test system
选用圆柱体、长方体和正方体等3种形状物体作为目标物体,以验证欠驱动手指对不同形状和尺寸的物体具有良好的抓取适应性,设置中部关节的阻尼小于顶部关节,以保证抓取时手指的运动按根部、中部、顶部的顺序进行,这和人手的抓取动作是类似的,目的是为了使手指完全包络目标物体。
图15(a)~(c)分别为单指样机抓取圆柱体、长方体和正方体的运动过程,圆柱体外径为20 mm,长方体横截面尺寸为24 mm×18 mm,正方体截面尺寸为25 mm×25 mm。实验结果表明,欠驱动手指可有效抓握这3种形状的物体,每个指段均与物体保持接触,抓取平稳,具有良好的自适应能力。
图16为抓取圆柱体时电机力矩曲线和转速曲线,可以看出根部电机的驱动力矩远大于中部电机,根部电机先开始运动,运动到位后中部电机再开始运动。
由角度传感器测量的各指段转角曲线如图17所示,可清晰地看出各指段的运动顺序是根部指段→中部指段→顶部指段。在中部指段运动到与目标物体表面接触时,顶部指段开始运动,此时中部指段和顶部指段同时运动,在大约19 s时刻中部指段停止运动,在大约21 s时刻顶部指段接触到目标,停止运动,抓取过程结束。
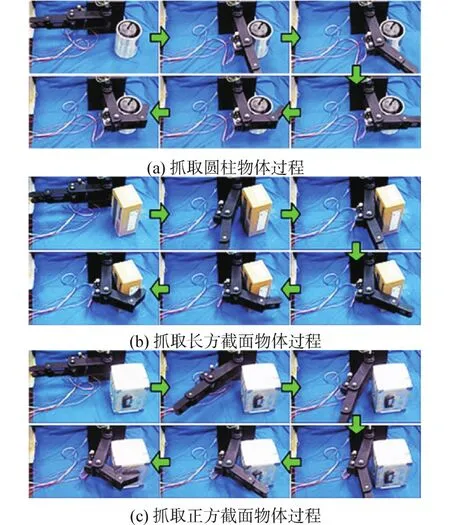
图15 抓取不同形状物体过程Fig.15 Process of capturing objects with different configurations

图16 抓取圆柱体过程中电机参数曲线Fig.16 Curves of motor parameters in the process of capturing the cylinder object

图17 抓取圆柱体过程中角度传感器输出曲线Fig.17 Curves of angle sensor′s output in the process of capturing the cylinder object
4 结论
1)本文提出一种基于行星传动的欠驱动自适应式捕获装置,该捕获装置由3个欠驱动机械手指构成,每个机械手具有3个自由度,由两个电机驱动。整个装置由4个电机驱动9个关节运动。
2)具有系统结构简单、驱动电机少、对目标具有自适应性等优点。进行了手指折叠过程的运动学分析,研制了单手指样机,对3种形状物体进行了抓取实验,得到了在抓取过程中多个参数的变化曲线,实验结果表明该欠驱动手爪能够自适应抓取不同形状物体,抓取状态稳定。
[1]邓宗全,李龙,李兵,等.空间抓取装置性能综合分析及评价[J].机械设计,2012,29(3):1-6,10.DENG Zongquan,LI Long,LI Bing,et al.Comprehensive analysis and evaluation on performance of space grappling device[J].Journal of machine design,2012,29(3):1-6,10.
[2]李新刚,裴胜伟.国外航天器在轨捕获技术综述[J].航天器工程,2013,22(1):113-119.LI Xingang,PEI Shengwei.On-orbit capture technology of spacecraft[J].Spacecraft engineering,2013,22(1):113-119.
[3]LALIBERTÉ T,GOSSELIN C M.Simulation and design of underactuated mechanical hands[J].Mechanism and machine theory,1998,33(1/2):39-57.
[4]GOSSELIN C M,LALIBERTE T.Underactuated mechanical finger with return actuation:US Patent 5762390[P].1998-06-09.
[5]黄海.新型仿人假手及其动态控制的研究[D].哈尔滨:哈尔滨工业大学,2008.HUANG Hai.Research on a new bio-prosthetic hand and its dynamic control[D].Harbin:Harbin Institute of Technology,2008.
[6]黄海,方宏根,姜力,等.基于虚拟弹簧的欠驱动手指的动力学建模和控制[J].吉林大学学报:工学版,2010,40(6):1688-1692. HUANG Hai,FANG Honggen,JIANG Li,et al.Virtual spring based dynamic model and control of underactuated hand[J].Journal of Jilin University:engineering and technology edition,2010,40(6):1688-1692.
[7]耿明超,赵铁石,赵飞,等.非惯性系下弹性欠驱动机器人动力学建模及应用[J].中国机械工程,2014,25(15):2080-2085.
GENG Minghao,ZHAO Tieshi,ZHAO Fei,et al.Dynamics model of elastic underacutated robot in a non-inertial frame and its applicaitons[J].China mechanical engineering,2014,25(15):2080-2085.
[8]耿明超,赵铁石,杨建涛,等.平面弹性欠驱动并联机构刚度特性分析[J].农业机械学报,2015,46(5):365-371.
GENG Mingchao,ZHAO Tieshi,YANG Jiantao,et al.Stiffness characteristics of planar elastic underactuated parallel mechanism[J].Transactions of the Chinese society for agricultural machinery,2015,46(5):365-371.
[9]DENNIS W.Orbital recovery’s responsive commercial space tug for life extension missions,AIAA 2004-6118[C]//Space 2004 Conference and Exhibit SPACE Conferences and Exposition.San Diego,California:AIAA,2004.
[10]TARABINI L,GIL J,GANDIA F.Ground guided CXOLEV rendez-vous with uncooperative geostationary satellite[J].Acta astronautica,2007,61(1-6):312-325.
[11]KAISER C,SJÖBERG F,et al.SMART-OLEV-an orbital life extension vehicle for servicing commercial spacecrafts in GEO[J].Acta astronautica,2008,63(1-4):400-410.
[12]KASSEBOM M.ROGER-an advanced solution for a geostationary service satellite,IAC-03-U.1.02[C]//54th International Astronautical Congress of the International Astronautical Federation.Paris:IAF,2003.
[13]BISCHOF B,KERSTEIN L.ROGER-robotic geostationary orbit restorer[J].Scientific and technology series,2005,109:183-193.
[14]于洋,宝音贺西,李俊峰.空间飞网抛射展开动力学建模与仿真[J].宇航学报,2010,31(5):1289-1296.
YU Yang,BAOYIN Hexi,LI Junfeng.Modeling and simulation of projecting deployment dynamics of space webs[J].Journal of astronautics,2010,31(5):1289-1296.
[15]陈钦,杨乐平,张青斌.空间飞网发射动力学建模仿真研究与地面试验[J].国防科技大学学报,2009,31(3):16-19.
CHEN Qing,YANG Leping,ZHANG Qingbin.Dynamic model and simulation of orbital net casting and ground test[J].Journal of national university of defense technology,2009,31(3):16-19.
[16]GARDSBACK M,TIBERT G.Deployment control of spinning space[J].Journal of guidance,control,and dynamics,2009,32(1):40-50.
[17]GIBBS G,SACHDEV S.Canada and the international space station program:overview and status[J].Acta astronautica,2002,51(1-9):591-600.
Design of an under-actuated self-adaptive capture device
LYU Xin1,XIA Yan2,LIU Rongqiang1
(1.School of Mechatronic Engineering,Harbin Institute of Technology,Harbin 150001,China;2.Tactical Weapons Division of China Academy of Launch Vehicle Technology,Beijing 100076,China)
Capture is an important part of the on-orbit service for a spacecraft.A space arm driven only by articulated drivers is complicated and has a large mass.To meet the design requirements of space capture,this study proposed an under-actuated self-adaptive capture device with the ability of unfolding and grasping.Planetary transmission was applied on this device to ensure that one driver could drive the rotation of two joints.This device included three 3-degrees of freedom under-actuated mechanical fingers;four motors were used to drive nine joints.In addition,this device was adaptive to the captured objects.This study mainly illustrates the design scheme and working principles of the capturing device,establishment of the coordinate system of one finger,and kinematics analysis of this device.Finally,the prototype grasping experiment verified that this device could capture objects of different configurations and sizes in a self-adaptive way.
space capture;under-actuated;mechanical hand;self-adaptation;kinematics analysis;grasping experiment
10.11990/jheu.201512077
http://www.cnki.net/kcms/detail/23.1390.u.20161026.0910.002.html
V445.4
A
1006-7043(2016)12-1709-07
吕辛,夏艳,刘荣强.欠驱动自适应式捕获装置设计[J].哈尔滨工程大学学报,2016,37(12):1709-1715.
2015-12-22.
2016-10-26.
国家自然科学基金项目(51275107);黑龙江省博士后基金项目(LBH-Z14109).
吕辛(1981-),男,助教,博士;
刘荣强(1965-),男,教授,博士生导师.
刘荣强,E-mail:liurq@hit.edu.cn.
LYU Xin,XIA Yan,LIU Rongqiang.Design of an under-actuated self-adaptive capture device[J].Journal of Harbin Engineering University,2016,37(12):1709-1715.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
小聪仔(婴儿版)(2020年12期)2021-01-26
中学生数理化·高一版(2020年1期)2020-02-20
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
荣誉杂志(2017年7期)2017-08-23
少年科学(2015年8期)2015-08-13
科普童话·百科探秘(2015年4期)2015-05-14
智慧与创想(2013年3期)2013-05-09
