面向AGC的变速变桨风电机组有功功率控制策略
2017-01-13 08:46:19陈载宇殷明慧刘建坤
电力工程技术 2017年1期
陈载宇, 沈 春, 殷明慧, 李 威, 刘建坤
(1. 南京理工大学自动化学院,江苏 南京 210094;2. 国电南瑞科技股份有限公司,江苏 南京 211106;3. 国网江苏省电力公司电力科学研究院,江苏 南京 211103)
面向AGC的变速变桨风电机组有功功率控制策略
陈载宇1, 沈 春1, 殷明慧1, 李 威2, 刘建坤3
(1. 南京理工大学自动化学院,江苏 南京 210094;2. 国电南瑞科技股份有限公司,江苏 南京 211106;3. 国网江苏省电力公司电力科学研究院,江苏 南京 211103)
随着风电的大规模、高渗透率接入电网,未来的电网调度迫切需要风电电源具备传统电源的有功功率稳定输出特性和调节性能。为此,面向自动发电控制(AGC)的风机有功功率控制(APC)已经成为当前风电机组主控策略的研究热点之一。目前,APC的实现方法主要包括基于桨距角调节的功率控制(PAC)和基于转速调节的功率控制(RSC)。基于对风机能量平衡关系的分析,总结了上述2种APC策略的实现原理,并利用FAST软件对控制方法和控制指令进行了仿真比较。仿真表明:相较于PAC方法,RSC方法具有更为平稳的有功功率输出;而且在低风速时,由于利用风轮的动能缓冲,RSC方法能够有效减少变桨机构的动作频率和动作幅度;但在高风速时,2种控制方法都需要频繁的变桨。此外,功率指令的设定对于APC控制效果的影响也是不容忽视的。
变速变桨风机;有功功率控制;自动发电控制;功率指令
风能作为一种成本低、技术成熟、可靠性高的可再生能源,近十几年来已在全球范围内迅速普及且大规模接入电网。随着风电渗透率的不断提高,特别是当风电高占比接入电网远离负荷中心时,薄弱的送端系统加上风电功率的随机性和间歇性,势必给电网的有功调度和安全稳定运行带来巨大压力和新的挑战[1-3]。
为促进互联大电网大规模地消纳风电功率,需要充分发掘风电机组的有功功率调节能力及在此基础上的电网辅助服务功能,以折中风电机组的风能捕获与接入电网的运行压力。为此,国家电网公司制定的《风电场接入电力系统技术规定》[4]中明确要求:风电场应具备有功功率调节能力,能够根据电网调度部门指令控制其功率输出。在此背景下,提升风电机组有功输出的平稳性和可控性,并在基础上将风电电源纳入电网自动发电控制(automatic generation control,AGC)管理,已成为风电机组主控策略的研究热点之一[5-16]。
为实现风电电源按调度指令恒定输出有功功率,已有许多学者针对变速变桨(variable speed variable pitch,VSVP)风电机组提出了有功功率控制(active power control,APC)策略[10-16],以替代传统的以最大化风能捕获为目标的最大功率点跟踪(maximum power point tracking,MPPT)控制[17-19]。目前,具有代表性的APC策略主要包括基于桨距角调节的功率控制(pitch angle control,PAC)[10-13]和基于转速调节的功率控制(rotor speed control,RSC)[12-16]。
(1) PAC方法[10-13]。该类控制方法在MPPT控制的基础上,将桨距角调节引入风机全风速段的功率控制,主要通过调整桨距角实现目标功率输出。PAC方法实质上是令风机捕获的风功率与输出的有功功率实时平衡,进而通过改变气动效率来控制风机的有功功率输出;
(2) RSC方法[12-16]。该类控制方法利用大转动惯量风轮作为风机捕获风能和输出电能之间的能量缓冲,避免了风机输入/输出功率的实时平衡。当捕获风功率充裕时,多余的气动输入能量将缓存至风轮动能;当捕获风功率不足时,通过风机减速释放风轮动能以维持恒定的输出功率。
本文首先基于VSVP风电机组的数学模型,分析了风机实现APC的能量平衡关系;在此基础上,概述总结了PAC方法和RSC方法的工作机理;并利用FAST(fatigue, aerodynamics, structures, and turbulence)软件对不同的控制方法、控制指令进行了动态仿真和比较分析。最后,对面向AGC的风电机组APC控制策略进行总结和展望。
1 VSVP风电机组的建模与分析
1.1 风电机组的机电动态模型
风轮捕获的风功率为[17]:
(1)
λ=ωrR/v
(2)
这里,ωr为风轮转速。
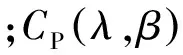
图1给出了某风机在不同桨距角β下的CP-λ曲线。可以看出:在桨距角固定的情况下,改变风机运行的叶尖速比可以使风能利用系数发生变化,进而调节捕获的风功率;而在叶尖速比不变的情况下,调节桨距角也能达到同样的目的。
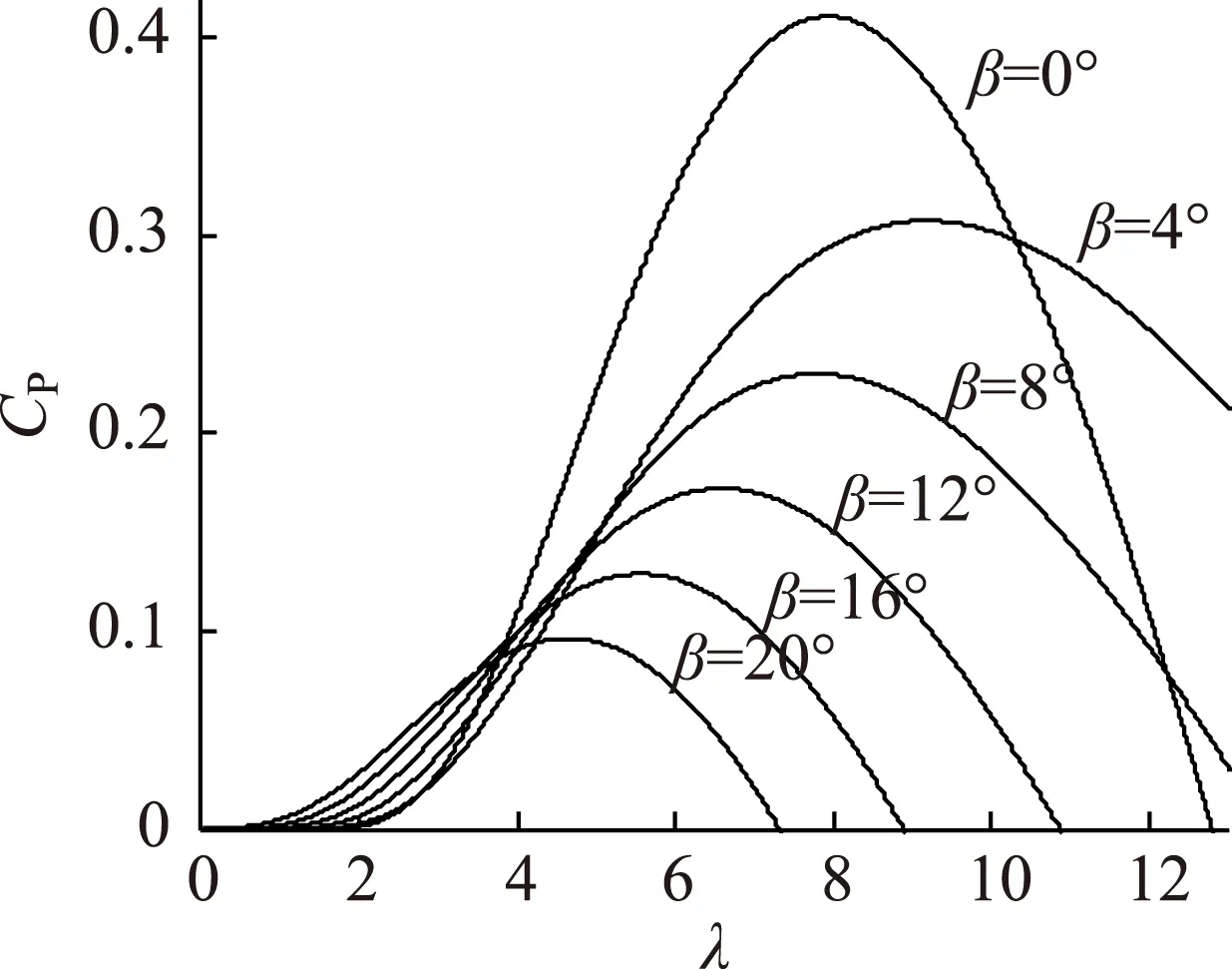
图1 不同桨距角对应的Cp-λ曲线
(3)
风机传动链可描述为一个双质量块模型,其运动方程为[17]:
其中:Tm=Pm/ωr为气动转矩;Dr和Dg为风轮和发电机的外阻尼系数;Jr和Jg为风轮和发电机的转动惯量;Tls和Ths为低速轴(风轮侧)和高速轴(发电机侧)的转矩;Kls和Dls为传动链扭转的刚度和阻尼系数(等效到低速侧);θr-θg/ng为高速轴和低速轴之间的扭转角度;ωg为发电机转速;ng为齿轮箱变速比;Tem为发电机电磁转矩。
若进一步将传动链视为刚性轴,则传动链可以简化为一个单质量块模型[18],式(4)可简化为:
(5)
1.2 风机的能量平衡分析
在应用传统MPPT控制策略时,风电机组输出的有功功率主要由实时风速对应的最大功率点决定。此时,由于基于风轮转速控制实现MPPT,风机因输入/输出功率不平衡而导致的失稳或超速问题并不突出。但是,当风电机组需要响应电网调度指令而保持恒定输出的有功功率时,面对随风速变化而不断波动的捕获风功率,需要更加关注风机输入/输出能量的平衡问题。
图2为风电机组能量转换关系(忽略阻尼和损耗)的示意图。由图2可见,对于风轮捕获的风功率Pm,一部分转化为发电机输出的电功率Pe;一部分缓存为风轮的动能,并相应改变风轮转速。由于控制目标为维持恒定的输出功率,APC控制设计的关键在于如何保证捕获风能、风轮动能与输出电能量三者的动态平衡,以使风机始终在设定转速范围内正常运行。即,当捕获风能充裕时,避免风轮因过量缓存动能而导致风机超速[13];当捕获风能不足时,避免风轮因过多释放动能而使风机失去稳定[6]。

图2 风电机组的能量转换关系
2 风电机组的有功功率控制策略
如图3所示,以永磁风电机组为例,实现APC功能的控制系统实际上包含2个控制环:(1)实现APC策略的外环控制;(2)调节发电机转矩的内环控制。需要注意的是,由于机电动态的响应时间要远远小于电磁动态,本文根据快慢子系统解耦的思想[17],仅讨论风机的机电动态及相应的APC策略。
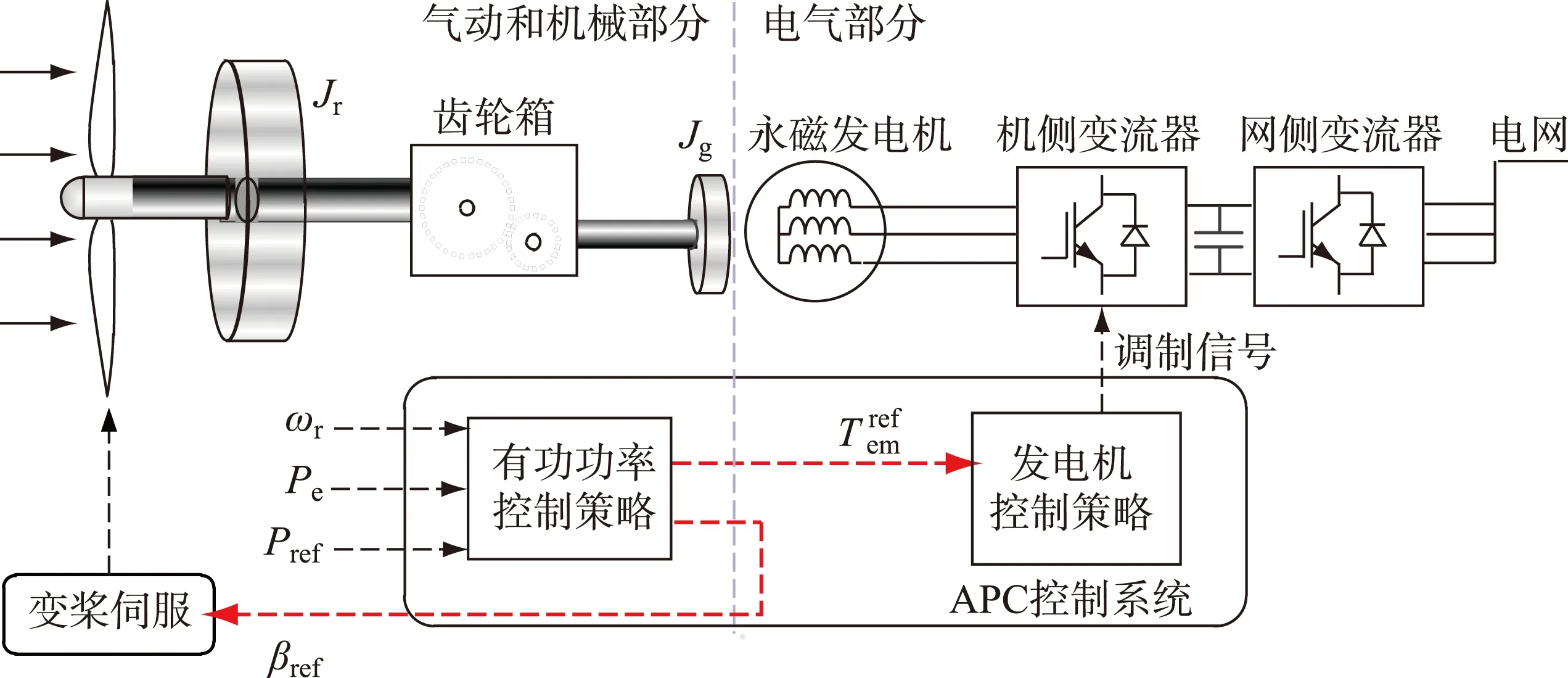
图3 永磁风电机组实现APC功能的控制系统结构原理
2.1 基于桨距角调节的有功功率控制

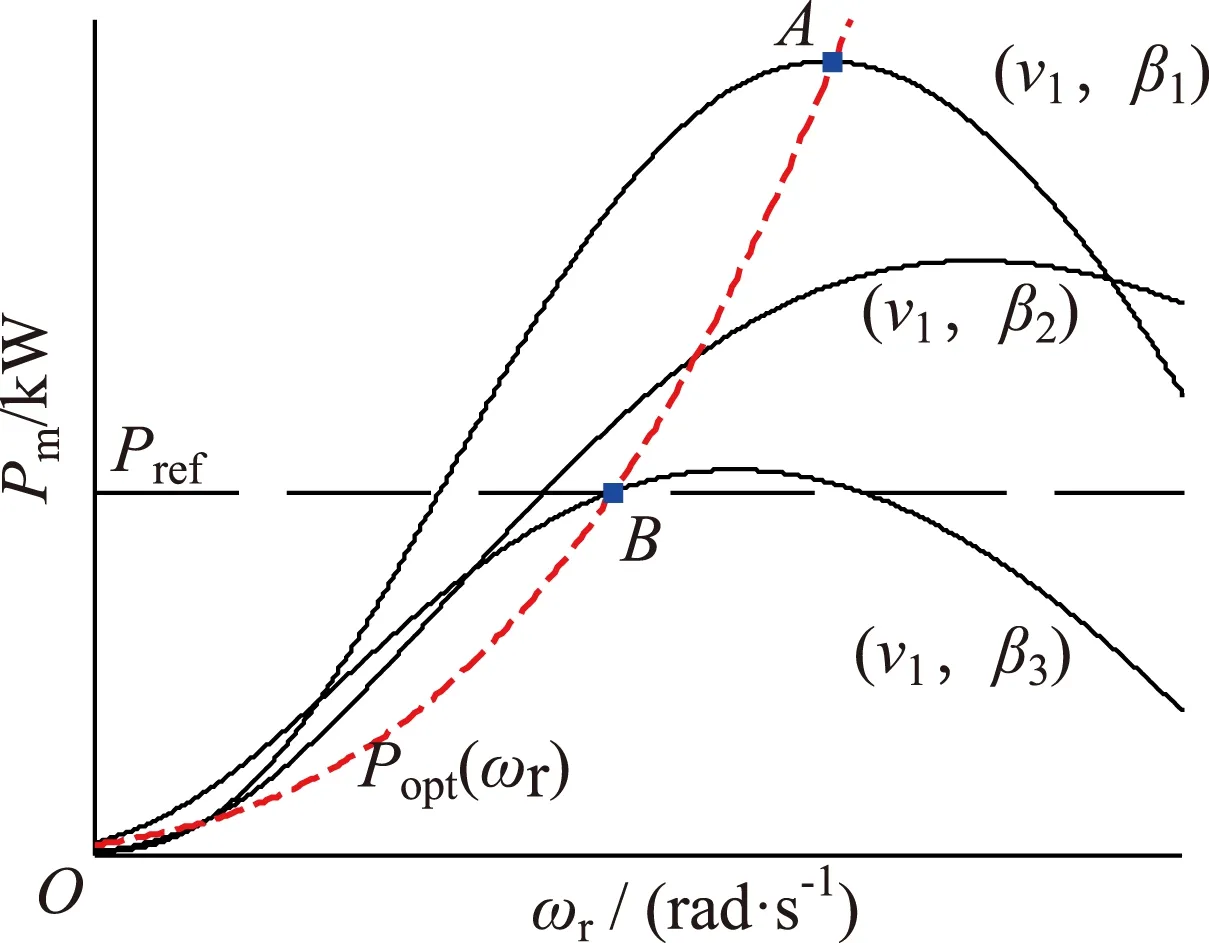
图4 PAC方法运行原理
图5给出了PAC控制器的原理结构[10, 12],其包括气动功率控制和输出功率控制2个部分。
(1) 气动功率控制:以输出电功率Pe与功率指令Pref的差值作为PI控制器的输入量,通过调节桨距角来改变捕获风功率Pm,使其与Pref保持平衡;
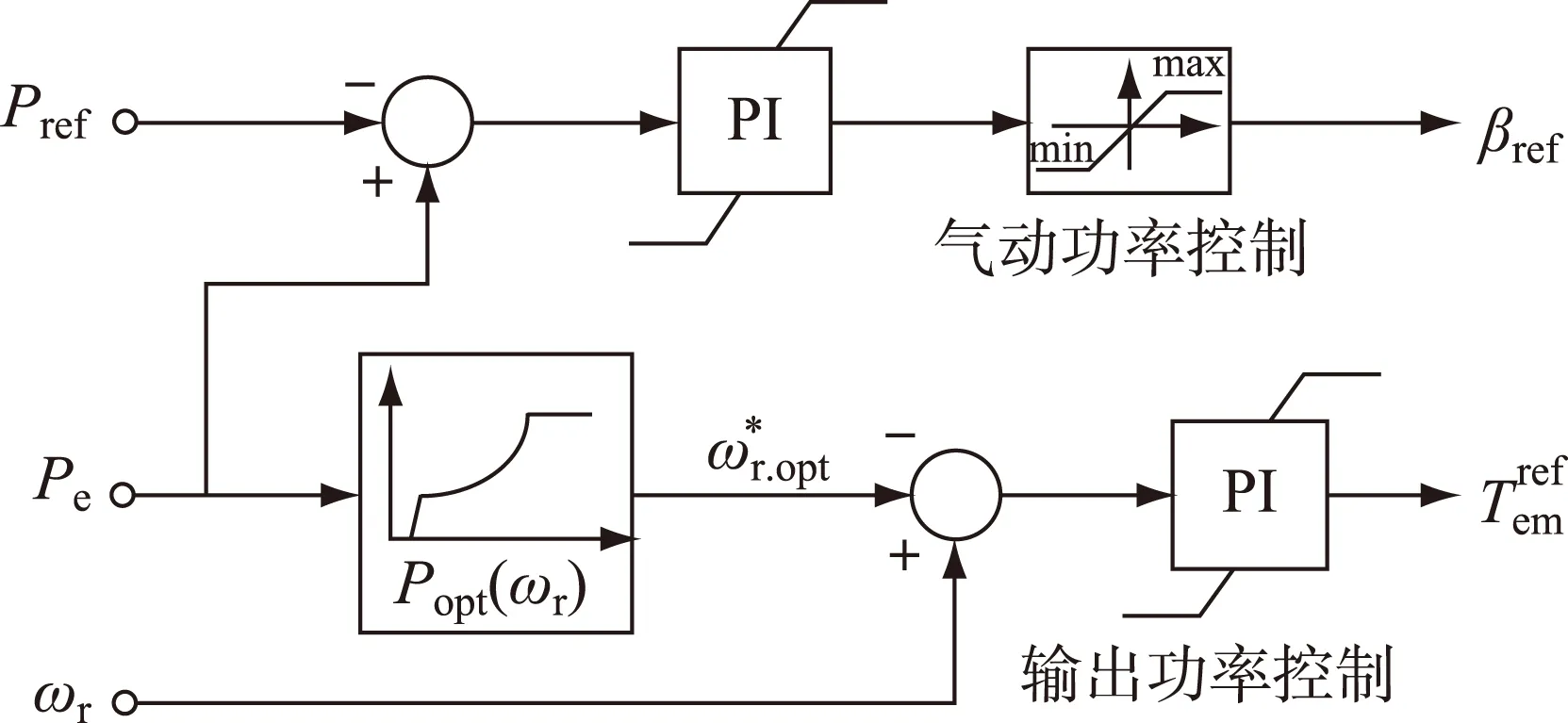
图5 PAC控制器的原理结构
2.2 基于转速调节的有功功率控制
RSC方法优先使用转速调节改变捕获风功率,并利用风轮动能缓冲输入/输出功率的瞬时不平衡。
RSC方法的运行原理[12-16]如图6所示。基于稳态分析可知,对于给定风速v1,如果风机保持恒定的输出功率Pref,则其转速将最终稳定在平衡点A处。类似地,风速v2对应于稳定平衡点B。进一步基于动态分析可知,当风速从v2跃增至v1时,Pm大于Pe,风轮将加速至A点。这不仅能降低Pm,而且可将气动能量缓存入风轮动能。反之,当风速从v1减小至v2,Pm小于Pe,风轮将最终减速至B点。风轮减速不仅能够增大Pm,而且释放的风轮动能可暂时维持恒定的有功出力。可见,上述2种风速变化导致的输入/输出功率不平衡都无需桨距角调节。
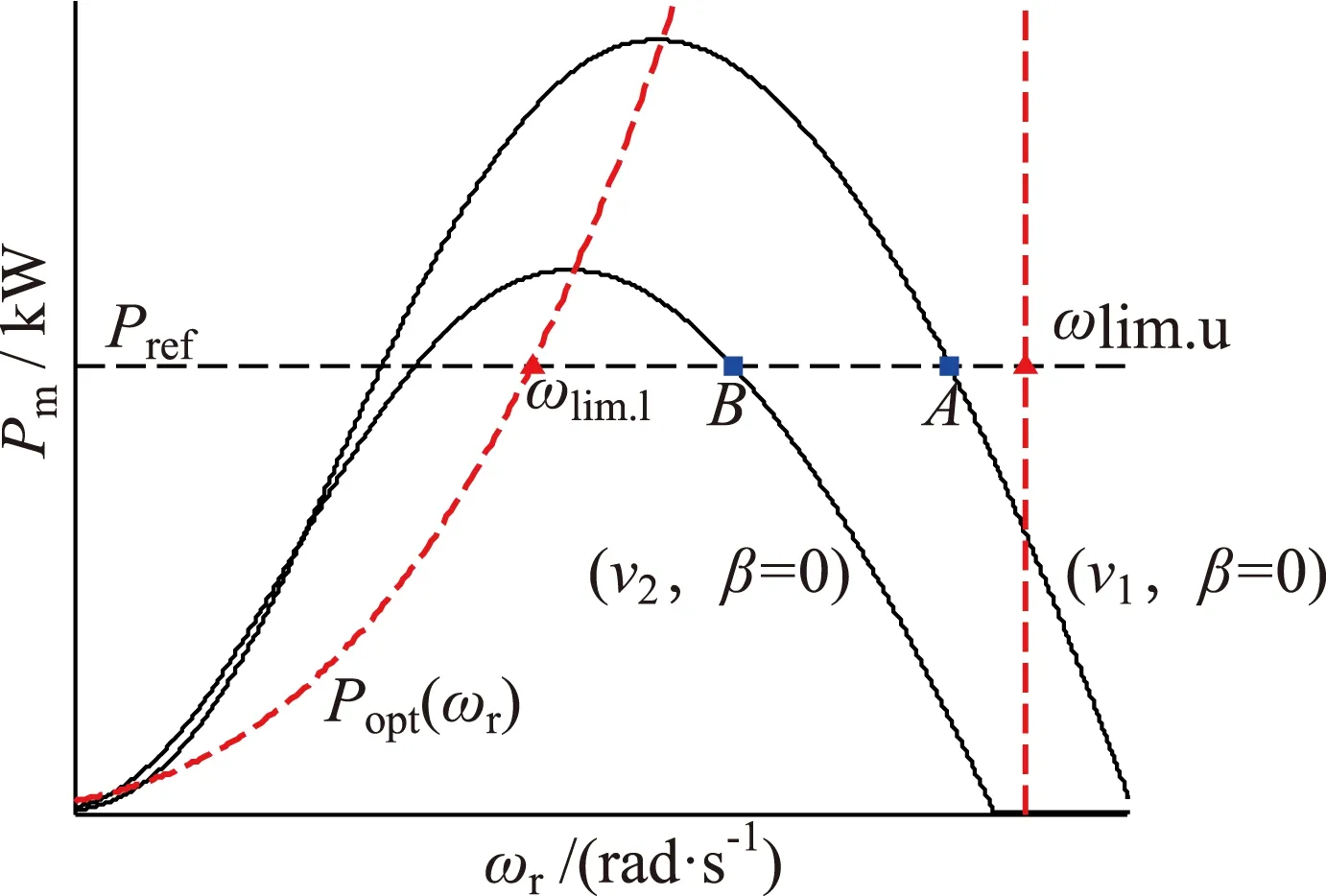
图6 RSC方法运行原理
综上,图7给出了RSC控制器原理结构[12, 14],其同样包括2个控制部分:
(1) 输出功率控制,当风轮转速不低于转速下限时,按功率指令Pref进行恒功率输出;否则,切换至MPPT控制;
(2) 风轮限速控制,以实际风轮转速和转速上限的差值作为PI控制器的输入,通过桨距角调节防止风机超速。
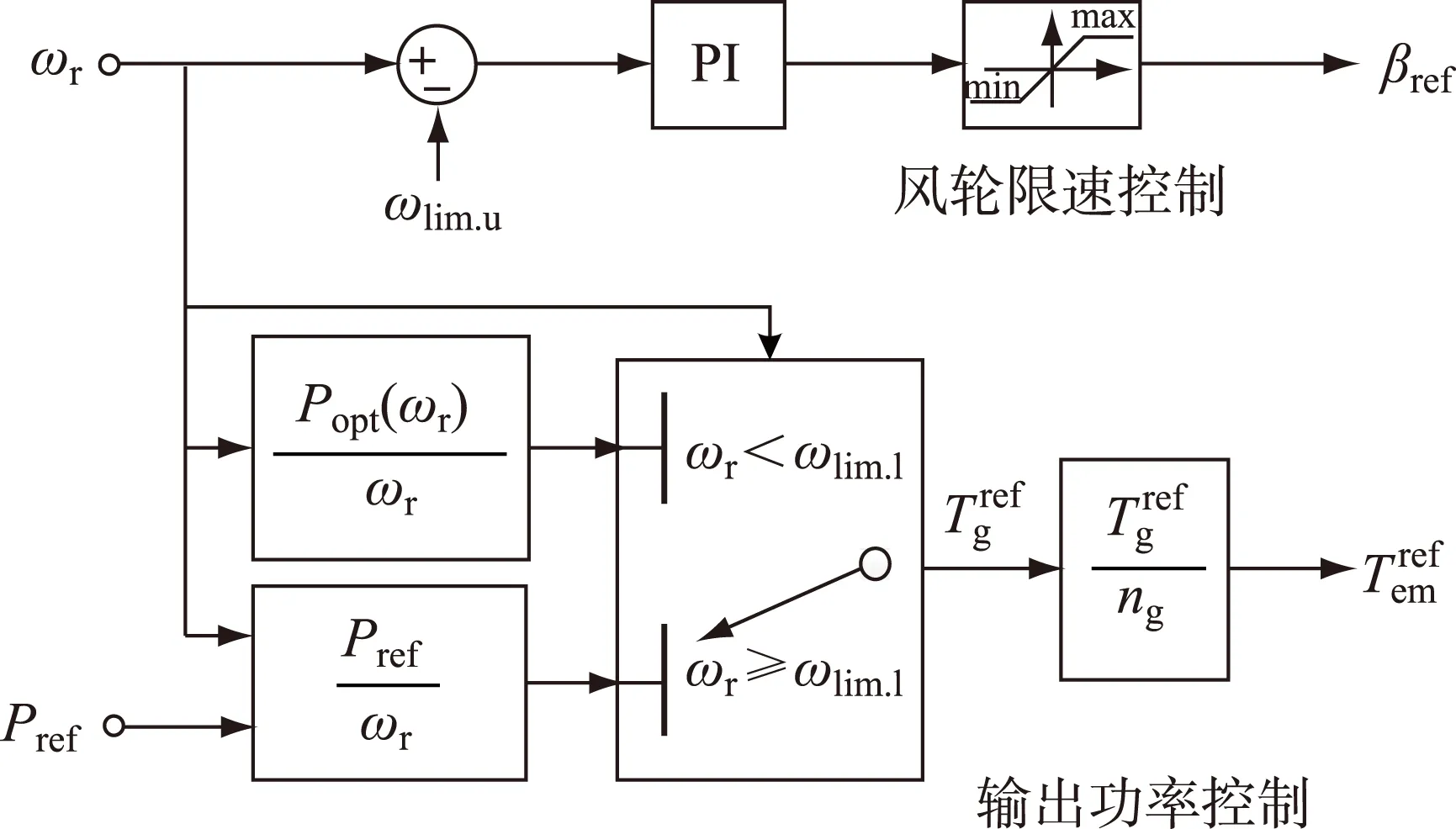
图7 RSC控制器的原理结构
3 仿真验证与比较分析
应用美国国家可再生能源实验室(national renewable energy laboratory, NREL)开发的风机仿真软件FAST[20],从输出功率平稳性和变桨动作频繁度2个方面,对PAC方法和RSC方法进行了仿真比较,并讨论了不同功率指令对APC控制效果的影响[21]。风机模型采用NERL开发的600 kW CART3试验机型[20]。
3.1 PAC方法与RSC方法的比较分析
分别采用风速幅值不同的(平均风速为7 m/s和10 m/s)2条10 min湍流风速,对PAC和RSC的控制性能进行仿真验证。Pref设为110 kW。
3.1.1 低幅值湍流风速的仿真比较
图8比较了2种APC方法在低幅值(平均风速为7 m/s)湍流风速下的仿真轨迹。由图8可以看出,由于依靠风轮动能缓冲避免了捕获风功率与输出电功率的即时平衡,RSC方法的应用效果要优于PAC方法。
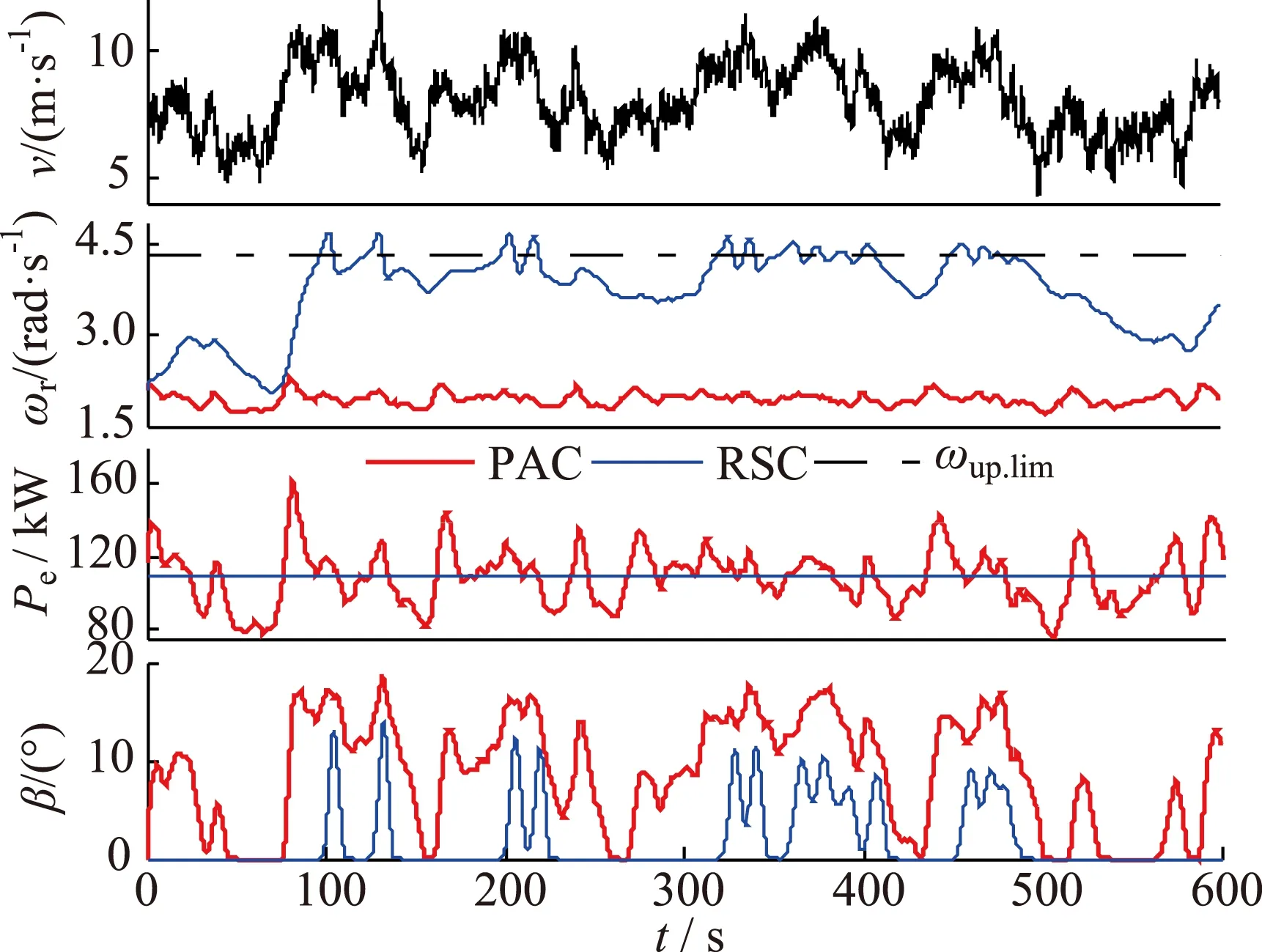
图8 低幅值湍流风速下2种APC控制方法的仿真结果
(1) 因为需要随风速波动不断改变捕获风功率,PAC要比RSC更加频繁地调节桨距角。它们对应桨距角累积调节量分别为339.2°和213.9°。显然,变桨机构的频繁调节容易导致机械疲劳,不利于风电机组的长期稳定运行。
(2) 在风轮转速不低于转速下限ωlim.l时,RSC方法可以恒定保持输出电功率;相比而言,由于变桨动作延时和变桨速度的限制,PAC方法输出的有功功率存在较大波动,平稳性较差。
3.1.2 高幅值湍流风速的仿真比较
采用相同的功率指令,高幅值湍流风速下PAC方法和RSC方法的仿真结果如图9所示。在高风速条件下,风机更容易达到转速上限,这极大限制了风轮动能的缓冲空间。此时,RSC方法需要频繁变桨来维持捕获风功率与输出电功率的实时平衡。统计可得,PAC和RSC对应桨距角累积调节量分别为358.3°和565.6°。可见,RSC方法虽然仍可获得相较于PAC方法更为平稳的有功功率输出,但也付出了更大的变桨代价。
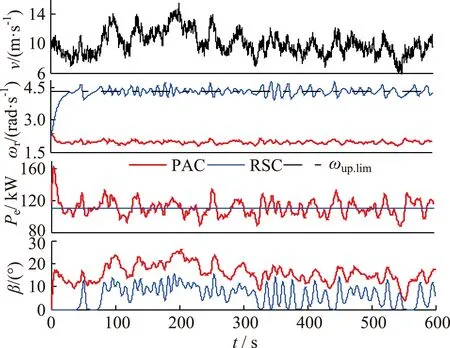
图9 高幅值湍流风速下2种APC控制方法的仿真结果
3.2 功率指令对控制性能影响分析

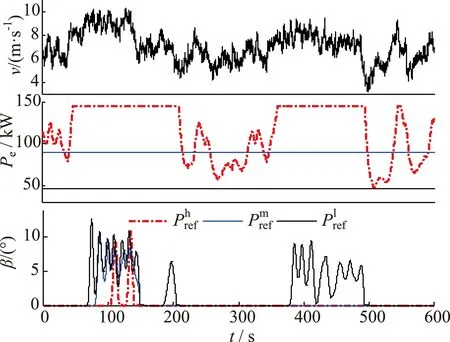
图10 不同功率指令下RSC方法的仿真结果
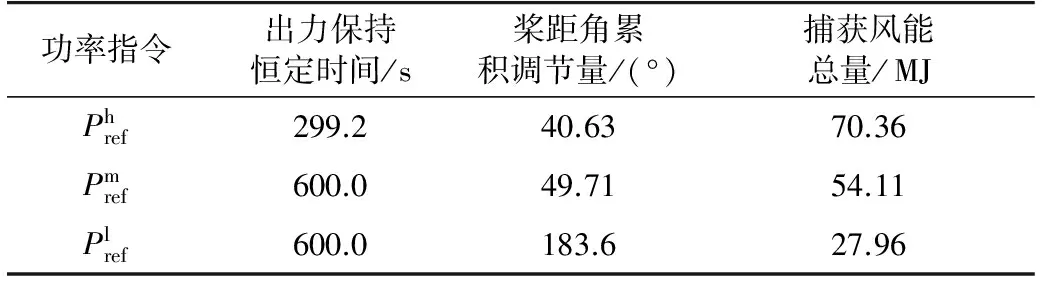
功率指令出力保持恒定时间/s桨距角累积调节量/(°)捕获风能总量/MJPhref299.240.6370.36Pmref600.049.7154.11Plref600.0183.627.96
(1) 当Pref设定过高时,由于捕获的风能不足以长时间支撑输出电功率,风机不得不频繁切换至MPPT控制以避免失稳。此时,风电出力的波动性和不确定性将大幅增加。
(2) 当Pref设定过低时,相对充裕的捕获风能和有限的风轮动能缓冲容量使得风机更容易运行至转速上限,从而频繁启动桨距角调节。

4 结束语
本文基于对风机能量平衡关系的分析,综述了当前主流的风电机组APC控制策略;并通过FAST仿真,比较分析了PAC方法和RSC方法在不同湍流风况下的控制性能,以及功率指令对控制性能的影响。仿真结果表明,相较于PAC方法,RSC方法能够充分利用大转动惯量风轮提供的动能缓存,具有更加平稳的有功功率输出,并在低风速时能够有效减少变桨机构的动作频率和动作幅度。同时,不恰当的功率指令也会严重影响RSC方法的应用效果,或是增加风电出力的波动性和不确定性,或是导致频繁的变桨动作。
面对当前的APC控制研究,本文认为至少存在如下2个方面值得进一步深入与完善:
(1) 全风速段的变速变桨协调优化控制研究。RSC方法虽然可以在低风速时利用风轮动能缓解变桨压力,但在面对高风速时,RSC方法实质上已退化为仅依靠变桨维持捕获风功率与输出电功率的实时平衡。在维持恒定出力的同时,如何进一步减少桨距角调节、降低变桨机构机械疲劳,是促进APC控制工程应用的重要指标之一。
(2) 风电机组调度功率指令的确定。功率指令的确定实质上是对电网调度和机组单机运行的协调平衡。如何结合电网AGC的具体要求,对一个调度周期内风电机组可稳定持续有功出力进行准确评估,是合理确定风电调度功率指令的基础。
[1] XUE Y, TAI N. Review of Contribution to Frequency Control Through Variable Speed Wind Turbine[J]. Renewable Energy, 2011, 36(6): 1671-1677.
[2] 丁 楠, 陈 中, 胡吕龙. 基于源网协同的风电并网系统双层优化调度[J]. 江苏电机工程, 2014,33(5): 6-10.
[3] 张文婷, 范立新, 顾 文. 考虑风电预测误差的电力系统有功实时调度[J]. 江苏电机工程, 2016,35(1): 11-15.
[4] GB/T 19963—2011 风电场接入电力系统技术规定[S]. 北京: 中国标准出版社,2011.
[5] CHANG-CHIEN L R, LIN W T, YIN Y C. Enhancing Frequency Response Control by DFIGs in the High Wind Penetrated Power Systems[J]. IEEE Transactions on Power Systems, 2011, 26(2): 710-718.
[6] LUO C, BANAKAR H, SHEN B, et al. Strategies to Smooth Wind Power Fluctuations of Wind Turbine Generator[J]. IEEE Transactions on Energy Conversion, 2007, 22(2): 341-349.
[7] HOWLADER A M, URASSAKI N, YONA A, et al. A Review of Output Power Smoothing Methods for Wind Energy Conversion Systems[J]. Renewable and Sustainable Energy Reviews, 2013, 26: 135-146.
[8] CHANG-CHIEN L R, YIN Y C. Strategies for Operating Wind Power in a Similar Manner of Conventional Power Plant[J]. IEEE Transactions on Energy Conversion, 2009, 24(4): 926-934.
[9] 舒 进, 张保会, 李 鹏, 等. 变速恒频风电机组运行控制[J]. 电力系统自动化, 2008, 32(16): 89-93.
[10] RODRIGUEZ-AMENEDO J L, ARNALTE S, BURGOS J C. Automatic Generation Control of a Wind Farm with Variable Speed Wind Turbines[J]. IEEE Transactions on Energy Conversion, 2002, 17(2): 279-284.
[11] HANSEN A D, SØRENSEN P, IOV F, et al. Centralised Power Control of Wind Farm with Doubly Fed Induction Generators[J]. Renewable Energy, 2006, 31(7): 935-951.
[12] FERNANDEZ L M, GARCIA C A, JURADO F. Comparative Study on the Performance of Control Systems for Doubly Fed Induction Generator (DFIG) Wind Turbines Operating with Power Regulation[J]. Energy, 2008, 33(9): 1438-1452.
[13] CHANG-CHIEN L R, SUN C C, YEH Y J. Modeling of Wind Farm Participation in AGC[J]. IEEE Transactions on Power Systems, 2014, 29(3): 1204-1211.
[14] 陈 波, 吴政球. 基于约束因子限幅控制的双馈感应发电机有功功率平滑控制[J]. 中国电机工程学报, 2011, 31(27): 130-137.
[15] FERNANDEZ L M, GARCIA C A, JURADO F, et al. Control System of Doubly Fed Induction Generators Based Wind Turbines with Production Limits[C]∥IEEE International Conference on Electric Machines and Drives, 2005, IEEE, 2005: 1936-1941.
[16] 周志超, 王成山, 郭 力, 等. 变速变桨距风电机组的全风速限功率优化控制[J]. 中国电机工程学报, 2015, 35(8): 1837-1844.
[17] BOUKHEZZAR B, SIGUERDIDJANE H. Nonlinear Control of a Variable-speed Wind Turbine Using a Two-mass Model[J]. IEEE Transactions on Energy Conversion, 2011, 26(1): 149-162.[18] MÉRIDA J, AGUILAR L T, DVILA J. Analysis and Synthesis of Sliding Mode Control for Large Scale Variable Speed Wind Turbine for Power Optimization[J]. Renewable Energy, 2014, 71: 715-728.
[19] 殷明慧, 蒯狄正, 李 群, 等. 风机最大功率点跟踪的失效现象[J]. 中国电机工程学报, 2011, 31(18): 40-47.
[20] DARROW P J. Wind Turbine Control Design to Reduce Capital Costs [R]. Golden, CO: National Renewable Energy Laboratory, 2009.
[21] YIN M H, XU Y, SHEN C, et al. Turbine Stability-constrained Available Wind Power of Variable Speed Wind Turbines for Active Power Control[EB/OL].IEEE Transactions on Power Systems, [2016-11-02]. http: ieexplore.ieee.org/abstract/document/7565527.
陈载宇
陈载宇(1989 —),男,天津人,博士研究生,研究方向为风力发电系统主控策略;
沈 春(1992 —),男,江苏东台人,硕士研究生,研究方向为风力发电系统有功功率控制策略;
殷明慧(1978 —),男,江苏南京人,副教授,研究方向为风力发电系统的设计与控制技术、电力系统稳定分析等;
李 威(1976 —),男,江苏睢宁人,研究员级高级工程师,从事电力系统电力系统安全稳定分析与控制等研究工作;
刘建坤(1980 —),男,山东潍坊人,高级工程师,从事电力系统仿真分析、电力系统规划和运行以及柔性交直流输电等研究工作。
Review of Active Power Control Strategy for Variable-speed Variable-pitch Wind Turbine Participating in AGC
CHEN Zaiyu1, SHEN Chun1, YIN Minghui1, LI Wei2, LIU Jiankun3
(1. School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China;2. NARI Technology Development Co. Ltd., Nanjing 211106, China;3. State Grid Jiangsu Electric Power Company Electric Power Research Institute, Nanjing 211103, China)
With large-scale and high penetration level wind integration, stable and adjustable active power output of wind energy conversion systems like traditional power sources is an urgent requirement for the future power grid operation and dispatch. Active power control (APC) for wind turbines participating in automatic generation control (AGC) has become one of the highly-concerned issues in the main control strategy research of wind turbine. Existing APC methods mainly include the output power control base on the pitch angle control (PAC) and the rotor speed control (RSC). Base on the analysis on energy balance of wind turbine, the principles of the aforementioned APC strategies are summarized in this paper. Then, the performance of PAC and RSC are compared by simulations on the FAST (Fatigue, Aerodynamics, Structures, and Turbulence) code. Results show that RSC possesses a more stable active power output as compared with PAC. Because of the energy buffer of rotor inertia, the frequency and amplitude of pitch angle manipulation can be effectively reduced at low wind speed by RSC method. However, both methods require frequent pitch angle adjustment at high wind speed. It is also pointed out that the power reference exerts a significant influence upon APC performance.
variable-speed variable-pitch wind turbine; active power control; automatic generation control; power reference
2016-10-28;
2016-11-21
国家自然科学基金(61673213, 51507080);中央高校基本科研业务费专项资金(30915011104);江苏省产学研前瞻性联合研究项目(BY2016004-13)资助
TM614
A
2096-3203(2017)01-0009-06
猜你喜欢
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
东方汽轮机(2020年3期)2020-11-04 11:07:34
太阳能(2019年10期)2019-10-29 07:25:08
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:46
大电机技术(2018年4期)2018-09-26 03:11:38
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
电机与控制应用(2015年3期)2015-03-01 03:49:52
电气传动自动化(2014年6期)2014-03-20 13:36:22