
RobotArt在工业机器人编程仿真教学中的应用研究
2017-01-11 05:44凌双明黄有全
湖南工业职业技术学院学报 2016年4期
凌双明,黄有全
(1.长沙航空职业技术学院,湖南长沙,410124;2.长沙民政职业技术学院,湖南长沙,410004)
RobotArt在工业机器人编程仿真教学中的应用研究
凌双明1,黄有全2
(1.长沙航空职业技术学院,湖南长沙,410124;2.长沙民政职业技术学院,湖南长沙,410004)
RobotArt工业机器人仿真软件应用在教学中可以使教学“低碳化”既节约了实训器材,有效降低了教学成本,极大提高了工业机器人编程的学习效率。通过虚拟仿真技术和实训车间实践操作相结合的方式,快速提高教学效果,减少了实训过程中的安全隐患,使学生快速掌握教学重点,同时也可减少实训教师的教学难度和工作强度。
RobotArt;工业机器人;低碳化;虚拟仿真技术
随着我国制造业的崛起,使我国成为了工业机器人的消费大国,也是全球最大的和最具潜力的工业机器人消费市场。工业机器人作为直接执行者,将在自动化整体转型中起着决定性的作用,也是自动化转型来优化产业结构发展的必经之路。一般来讲,使用机器人的生产线可以降低80%的劳动力,并且还可以将效率提高4倍以上。仅2015年世界机器人产销量达100万台,创历史新高,其中,中国市场占了全球市场的1/3强,目前,机器人产业在我国正处在井喷之势。各机器人厂商都有自己的离线编程软件,不能通用,因此需要使用第三方软件,如delmia、robcad等。专职品牌机械手离线编程(主要是示教复杂运动轨迹,包括复杂数控加工)有ABB、Fanuc、Kuka、Motoman、Staubli。RobotArt是常用于教学的第三方离线编程软件,具有人性化界面,操作简单易学。
1.虚拟仿真教学的必要性
1.1 “低碳化”教学的需求
低碳教学是借用低碳经济的理念而来。“低碳课堂就是在自然和谐的教学环境中,减少无效或低效的教学活动,减少资源浪费,节约课堂时间、师生精力,最大限度地提高教学效率,在有限的课堂时间内‘低投入、高产出’,从而实现师生可持续发展的课堂。”工业机器人在很多工业领域广泛使用且种类众多,除了四大家族KUKA,ABB,FANUC,YASNAC之外,还有国产机器人比如汇博机器人和新松机器人等,各种品牌的机器人在操作与使用上存在许多差异,且工业机器人系统造价昂贵,将所有种类机器人和应用环境都配齐很难实现,也不符合低碳化教学模式的开展。
1.2 课程强化实训的需求
工业机器人在线编程需要每人一台机器人进行操作编程和示教,这对实训场地的要求非常高和资金投入也很大,这就需要利用虚拟仿真来代替机器人的实物了。工业机器人实训可以先在仿真实训室每人一台电脑进行离线编程导出文件,然后再去机器人操作车间导入程序块进行修正与调试。利用计算机虚拟仿真教学可以使学生课前课后都能模拟练习各种品牌和型号的机器人编程,大大提高了课堂的学习效率,也节约了实训成本,帮助学生在虚拟环境中快速认识机器人、快速学会机器人示教器基本操作,大大缩短学习周期,降低学习成本。
1.3 参加技能大赛的需求
工业机器人是典型的机电一体化设备,目前全国高职系统机电相关的职业技能大赛中越来越多地加入了工业机器人应用的部分,而每个举办学校的机器人种类和应用环境有所区别,虚拟仿真技术除了可以满足实验实训教学需求外,还可针对各类技能大赛不同应用的要求,自行建模,无须购买实际设备,提高了学生学习工业机器人技术和参加技能大赛的兴趣[2]。
2.RobotArt专业仿真软件在教学中的应用
2.1 RobotArt介绍
RobotArt是北京华航唯实机器人科技有限公司推出的工业机器人离线编程仿真软件,软件根据几何数模的拓扑信息生成机器人运动轨迹,之后轨迹仿真、路径优化、后置代码一气呵成,同时集碰撞检测、场景渲染、动画输出于一体,可快速生成效果逼真的模拟动画。广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等领域。RobotArt软件采用CS架构(客户端、服务器架构),在云端的服务器通过云计算技术,接收客户端发送的请求,将计算结果返回客户端,通过3D显示技术呈现出来。
2.2 RobotArt仿真教学设计
利用机器人仿真软件可以采用任务驱动式教学法模拟真实的工作场景进行教学,RobotArt作为机器人离线编程软件,其工作过程分为轨迹设计、仿真、后置、真机运行四步。轨迹设计可以分为四种方式:①由三维模型点线面生成轨迹:通过选择三维模型的边作为轨迹的路径,选择面作为轨迹的法向,这种方式生成轨迹精确,适合去毛刺、切割、焊接等工艺[3]。②由曲线投影到面生成轨迹:将2D、3D曲线投影到要加工的曲面上,然后选择投影线作为轨迹,选择面作为轨迹法向,这种方式生成的轨迹,适合打磨,抛光等工艺[3]。③由曲线加面生成轨迹:完全设计自己的空间曲线作为轨迹路径,选择面或独立方向作为轨迹法向,这种方式生成轨迹,适合喷涂,智能搬运,抓取等工艺。接着是导入外部轨迹:软件除自己生成轨迹外,还支持导入外部轨迹,并支持与加工零件绑定。然后是过程仿真,根据机器人运动学与动力学知识,生成连续的机器人姿态,同时启动碰撞检查模块,用来检查机器人工作过程中,是否有歧义点,是否会发生干涉等。后置模块是根据当前选择的机器人厂商与型号,生成对应的机器人后置代码。最后是真机调试,通过网络连接或U盘等,将后置代码传输到机器人本体,调试机器人真实工作情况。具体仿真步骤如图1所示。

图1 仿真步骤
2.3 虚拟仿真教学实践过程
在实际仿真教学实践中,可以将仿真教学分成五阶段式(以使机器人沿指定长方形路径运动为例)。第一阶段是导入情景,布置任务。在此部分,先导入焊枪作为工具,然后设置TCP坐标、导入长方形工件。第二阶段是教师利用软件讲解和演示本任务所需要用到的指令函数。长方形路径运动采用offs函数进行精确确定运动路径的准确数值,机器人的运动路径从起始点P1,经过P2、P3、P4点,回到起始点P1。轨迹参数设置如图2所示。第三阶段是学生分组讨论编写程序。
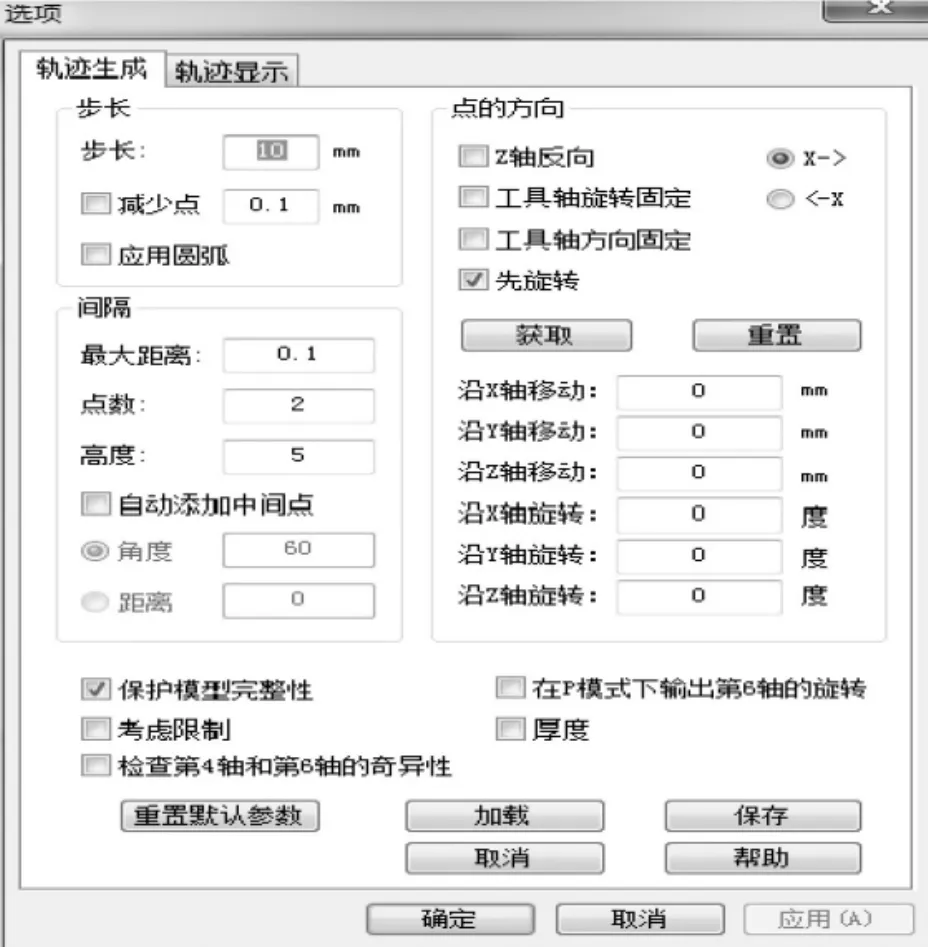
图2 轨迹参数设置对话框
在此阶段,以学生自主学习编程互相交流为主,教师从旁辅导答疑。第三阶段是学生在RobotArt仿真软件上离线编程调试。第四阶段是导入后置代码到ABB或者KUKA等机器人的本体示教器进行操作调试。后置代码的生成如图3所示。该阶段考虑到安全问题和设备数量有限,可以由每组的组长或代表完成机器人本体的操作,教师要在整个环节中密切注意没台机器的运行情况,避免学生发生撞抢等安全事故。第五阶段是任务验收。即由教师根据各组的机器人离线编程、在线调试和完成时间给出该项目学生的最终成绩,作为该课程的过程性考核依据。
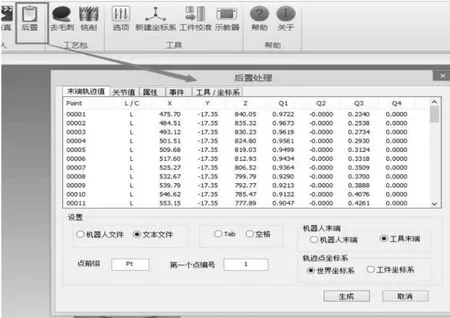
图3 生成后置代码
3.总结
RobotArt工业机器人仿真软件应用在教学中可以使教学“低碳化”既节约了实训器材,有效降低了教学成本,又能把学生从实训室解放出来,使学生不管在什么地方都可以利用电脑和网络进行学习,极大提高了工业机器人编程的学习效率。通过虚拟仿真技术和实训车间实践操作相结合的方式,快速提高教学效果,减少了实训过程中的安全隐患,使学生快速掌握教学重点,易于突破教学难点,也减少了实训教师的教学难度和工作强度,为国家输出符合工业4.0要求的复合型高职人才[2]。
[1]姚庆文,丁辉.PLC课程的项目教学设计与实践[J].常州轻工职业技术学院学报,2009(2).
[2]仇高贺.虚拟仿真在高职工业机器人教学中的应用研究[J],新课程研究,2015(9):17-20.
[3]叶晖,管小清.工业机器人实操与应用技巧[M].北京:机械工业出版社,2010.
[4]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对策[J]包装工程,2011,32(2):96-102
Research on the Application of RobotArt in the Simulation Teaching of Industrial Robot Programming
LINGShuan-ming,HUANGYou-quan
(1.Changsha Aeronautic Vocational and Technical College,Changsha 410124,Hunan; 2.Changsha Social Work Vocational College,Changsha 410124,Hunan)
The application of RobotArt industrial robot simulation software in teaching can make the teaching“low carbonization”,which not only saves the practical training equipment,effectively reduces the teaching cost,and greatly improves the learningefficiencyofthe industrial robot programming.Through a combination ofvirtual simulation technology and training workshop practice,the teachingeffect is rapidlyimproved,and the potential safetyhazard in the process oftrainingis reduced,and students can quicklygrasp the focus ofteaching,and the teachingdifficultyand intensityofwork for the trainingteachers are reduced.
RobotArt,industrial robot,lowcarbonization,virtual simulation technology
TP317.4
A
1671-5004(2016)04-0009-03
2016-6-2
湖南省教育科学十二五规划课题资助项目“高职工科教学做网络课程建设研究与实践(项目编号:XJK012CXJ003)”。
凌双明(1983-),女,湖南长沙人,长沙航空职业技术学院实验师、湖南大学电子与通信工程专业硕士,研究方向:PLC、工业机器人技术。
黄有全(1966-),男,湖南长沙人,长沙民政职业技术学院副教授、高级工程师。
猜你喜欢
儿童故事画报(2021年8期)2021-10-04
防爆电机(2021年4期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
制造技术与机床(2019年12期)2020-01-06
铁道通信信号(2019年3期)2019-04-25
小学生导刊(2018年22期)2018-08-21
中成药(2018年2期)2018-05-09
环境科技(2016年4期)2016-11-08
国际感染病学(电子版)(2016年2期)2016-03-09
大众考古(2014年10期)2014-06-21
