
舰载武器系统惯性局部基准在线标定技术研究*
2017-01-11 03:41陈维义刘红亮
舰船电子工程 2016年12期
罗 云 陈维义 刘红亮
(1.海军工程大学兵器工程系 武汉 430033)(2.海军蚌埠士官学校兵器系 蚌埠 233000)
舰载武器系统惯性局部基准在线标定技术研究*
罗 云1陈维义1刘红亮2
(1.海军工程大学兵器工程系 武汉 430033)(2.海军蚌埠士官学校兵器系 蚌埠 233000)
为了解决舰载武器系统惯性局部基准传统标定复杂费时的问题,论文主要研究了惯性局部基准的在线标定方法,该法利用北斗卫星导航系统提供的外部信息,同时综合舰船自身机动,建立误差模型,采用卡尔曼滤波器对惯性局部基准中的相关误差项进行标定。仿真结果表明,可实现对部分误差参数的标定。
舰载武器系统; 惯性局部基准; 在线标定; 卡尔曼滤波器
(1. Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033)(2. Weapon Department, Bengbu Naval Petty Officer Academy, Bengbu 233000)
Class Number U666.1
1 引言
目前,大型水面舰艇为了克服甲板变形所引起的误差,舰载武器系统安装有舰载捷联垂直参考基准(Strapdown Vertical Reference Unit,SVRU)[1~2],主要为武器系统提供舰艇的航向角、航向角速度;纵摇角、纵摇角速度;横摇角、横摇角速度等信息。其本质为捷联惯导系统,相对于高精度的主惯导,SVRU也被称为局部子惯导,也可称为惯性局部基准。激光陀螺惯性局部基准是基于捷联惯性导航原理的舰船运动测量设备。为保证输出参数精度,激光陀螺惯性局部基准设备需要定期对激光陀螺和加速度计等惯性器件的误差模型系数重新进行标定。标定分为分立标定和系统标定,其中在线标定是系统级标定中重要的一种。国内外很多的专家学者已经对相关的在线标定进行了相关的研究和探索。I.A.Vasinaeva[3]提出了一种利用飞机特殊机动和卫星导航系统的数据来对捷联惯导系统参数的值进行标定,使其自主导航误差减小。国内对于捷联式惯性器件的在线标定方法研究比较晚。军械工程学院的石志勇等[4]系统介绍了捷联惯导在线标定技术,充分阐述了捷联惯导在线标定技术研究现状,对在线标定中的误差建模、可观测性分析、最优误差激励方式的选择以及参数估计进行了深入分析和归纳。在文献[5]中,他提出对于火箭炮的射前准备阶段加入横滚运动的标定方案,结果表明可使多个参数变得可观,且其他参数的可观测度也明显提高。中国航天科技集团第十六研究所的卫育新[6]等提出利用车载里程仪和惯性器件对陀螺和加速度计的部分7项误差进行标定。北京航空航天大学仪器科学与光电工程学院的张小跃[7]针对光纤捷联系统惯性测量单元的误差参数标定问题,引入高精度外部信息源并利用卡尔曼滤波器对IMU进行在线标定。哈尔滨工程大学自动化学院的高伟[8]主要对陀螺仪漂移进行在线标定,给出了两种现场最有的标定方案。国内外关于在线标定的研究主要集中在误差建模、可观测性分析、最优误差激励方式的选择、参数估计。且平台多为陆上车辆和飞机,海上舰艇平台鲜有报道。本文提出了一种适用于舰载武器系统中惯性局部基准的在线标定方法。该法有效利用“北斗二号”卫星导航系统提供的外部信息,同时综合舰艇自身机动对惯性局部基准中的相关误差项进行标定。
2 惯性仪表的输出误差参数模型

(1)
(2)
式中,δfb和δωibb表示惯性仪表的输出测量误差,fb和ωibb表示惯性仪表的理想输出,δMa和δMg的对角线元素表示惯性仪表的标度因素误差,非对角线元素表示惯性仪表的安装误差系数,▽和ε表示惯性仪表的零偏。
3 在线标定误差模型
激光陀螺惯性局部基准在线标定中需要有效的利用外测系统提供的外部导航信息,同时结合舰船自身的机动,运用 Kalman 滤波进行有效的估计。
目前可作为外部参考信息的设备有两种:一是更高精度的惯导系统;而另外一种则是接入高精度的外测设备,以获取外测设备的的姿态、速度和位置测量基准信息,经过系统内部的解算最后可以获得加速度和角速度基准信息。本文主要以“北斗二号”卫星导航系统作为测量载体信息来源,将其与捷联垂直基准的速度、位置、姿态测量值相比较,以用来获得观测值。北斗系统具有10m左右定位精度,0.2m/s的测速精度和 20ns的授时精度。如果采用RTK (Real Time Kinematic)技术,可以达到厘米级精度[10],基本与GPS系统的精度相当,满足标定需求。
3.1 系统状态方程
考虑惯性局部基准安装在舰载武器系统内部,一般情况下,在完成系统标定后,若不对陀螺、加速度计进行重新安拆装,则其安装误差系数基本保持不变,故在此不考虑该误差项。
利用位置误差方程、速度误差方程、姿态误差方程,结合Kalman滤波方程和北斗的导航系信息,可以建立捷联垂直基准的在线标定误差模型,其模型如下:

(3)
其中,X(t)为17维状态向量
X(t)=[φEφNφUδVEδVNδLδλεgxεgy
εgz▽ax▽ayδKgxδKgyδKgzδKaxδKay]T
(4)
A(t)为系统的向量矩阵
(5)
(6a)
(6b)
(6c)
(6d)
(6e)
(6f)
(6g)
(6h)
(6i)
(6j)
(6k)
(6l)
3.2 系统量测方程
将北斗卫星导航系统与激光陀螺惯性局部基准的速度误差和位置误差作为观测量。
设激光陀螺惯性局部基准的输出速度为
(7)
式中,VSE、VSN为激光陀螺惯性局部基准输出的东向和北向速度;VRE、VRN为激光陀螺惯性局部基准的真实速度;δVSE、δVSN为激光陀螺惯性局部基准东向和北向速度误差。
设北斗卫星导航系统的输出速度为
(8)
式中,VBE、VBN为北斗卫星导航系统输出的东向和北向速度;VRE、VRN为北斗卫星导航系统的真实速度;δVBE、δVBN为北斗卫星导航系统的东向和北向速度误差。
速度误差定义为
(9)
量测方程为
ZV(t)=HV(t)X(t)+WV(t)
(10)
式中,
WV(t)为速度观测噪声阵
设激光陀螺惯性局部基准输出的位置信息为
(11)
式中,λS、LS为激光陀螺惯性局部基准的纬度、经度;λ、L为激光陀螺惯性局部基准的真实的纬度、经度;δλS、δLS为激光陀螺惯性局部基准解算的纬度、经度误差。
设北斗卫星导航系统输出的位置信息为
(12)
式中,λB、LB为北斗卫星导航系统的纬度、经度;λ、L为北斗卫星导航系统的真实的纬度、经度;δλB、δLB为北斗卫星导航系统解算的纬度、经度误差。
由此定义外部量测位置误差为
(13)
量测方程为
ZP(t)=HP(t)X(t)+WP(t)
(14)

WP(t)为位置观测噪声阵。
由式(9)和式(13)可得系统的量测方程为
Z(t)=H(t)X(t)+W(t)
(15)
其中,外部观测量为
(16)则系统的量测矩阵为

(17)
系统的量测噪声阵为
(18)
4 在线标定路径设计与仿真分析
考虑实际情况下舰艇运动模式的限制,且纵摇角、横摇角受海况影响,舰艇不能控制,舰艇能控制的是航向和航速。为此在线标定的方式需要满足工程实现要求。
海上航行的舰艇,由于受风浪运动会出现摇摆运动,应按照多个正弦运动模型来逼近其实际情况。在这里,为了简单起见,只考虑用单一正弦波来模拟。其中,航向角、纵摇角、横摇角的幅值分别取为5°、2°、2°。舰艇以V=12m/s的线速度、4°/s的角速度做圆周航行,初始航向角为0°。初始经度为124°,初始纬度为32°。
选取加速度计的常值偏置为50μg,随机误差为10μg,三个激光陀螺仪的常值漂移为0.1°/h,随机漂移为0.05°/h。陀螺仪和加速度计的标度因数均取为 200 ppm,同时取陀螺仪的随机标度因数为 50 ppm,加速度计的随机标度因数也为 50 ppm。初始误差角Δθ0=Δγ0=30′,Δψ0=60′。
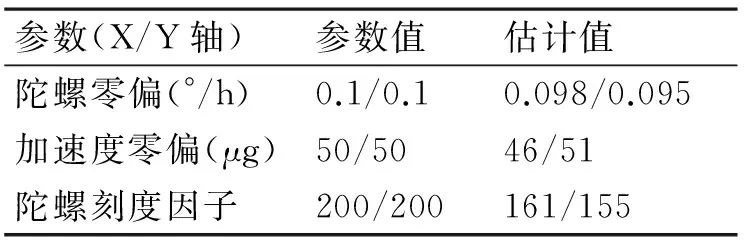
表1 仿真结果
仿真结果表明,东向、北向加速度计常值偏置,东向、北向陀螺仪的零偏、标度误差因素趋于收敛,结果如表1所示。由此可见,在线标定只能实现部分误差参数的标定。
5 结语
激光陀螺惯性局部基准的标定主要以实验室里的分立标定为主,因为能全面标定误差参数、而且精度高,但是复杂费时。因此,本项目主要研究了一种适用于舰载武器系统中惯性局部基准的在线标定方法。分析了惯性局部基准的误差特性,给出了基于外部基准源的在线标定误差模型,并进行了在线标定路径的设计仿真分析,得出部分误差参数可以在线标定的结论。
[1] 刘言.基于光纤陀螺舰载捷联垂直基准关键技术研究[D].哈尔滨:哈尔滨工业大学,2011.
[2] 田启生,杨利民.武器控制系统的新技术——“捷联式垂直参考基准”[J].舰船科学技术,1992,03:61-65.
[3] I.A.Vasinaeva,A.O.Kal’chenko. Analysis of in-flight calibration accuracy for a strapdown inertial navigation system with consideration of aircraft maneuvers[J]. Moscow University Mechanics Bulletin, 2014(69):21-24.
[4] 全振中,石志勇,王毅.捷联惯导在线标定技术[J].现代电子技术,2012,05:128-131.
[5] 王志伟,石志勇,全振中. 某型火箭炮捷联惯导在线标定方案研究[J]. 红外与激光工程, 2015,01:266-272.
[6] 卫育新,白俊卿. 车载 SINS/DR 组合导航系统的在线标定方法[J].中国惯性技术学报,2009,12:651-653.
[7] 张小跃, 张春熹, 宋凝芳.基于组合导航技术的光纤捷联系统在线标定[J].航空学报,2008,11: 1656-1659.
[8] 高伟,叶攀,许伟通.捷联惯导系统现场标定方法[J].计算机测量与控制,2016,24(7):301-303.
[9] 杨晓霞,黄一.激光陀螺惯导的一种系统级标定方法[J].中国惯性技术学报,2008,02:1-7.
[10] 王仲锋,禹东彬,唐铭蔚.北斗RTK的定位实验与精度分析[J].长春工程学报(自然科学版),2014,15(2):79-81.
Online Calibration for Strapdown Vertical Reference Unit of Shipborne Weapon System
LUO Yun1CHEN Weiyi1LIU Hongliang2
In order to solve the complex and time-consuming problem of traditional calibration for strapdown vertical reference unit of shipborne weapon system, an online calibration method is proposed, which makes use of the BEIDOU-2 GNSS external information, kalman filter and related error terms of the ships’ own maneuvering related to strapdown vertical reference unit to finish the calibration. Simulation result shows that part of error parameters can be calibrated.
shipborne weapon system, strapdown vertical reference unit, online calibration, Kalman filter
2016年6月1日,
2016年7月19日
海军工程大学自然科学基金(编号:HGDQNJJ13032)资助。
罗云,男,博士,讲师,研究方向:武器系统与运用工程。陈维义,男,博士,教授,研究方向:武器系统与运用工程。刘红亮,男,博士,讲师,研究方向:武器系统与运用工程。
U666.1
10.3969/j.issn.1672-9730.2016.12.014
猜你喜欢
河南科技(2022年7期)2022-05-23
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
