
基于位置信息融合的无人机战场通信态势感知方法*
2017-01-11 03:34袁西超
舰船电子工程 2016年12期
袁西超 何 辉 杨 俭
(中国人民解放军电子工程学院 合肥 230037)
基于位置信息融合的无人机战场通信态势感知方法*
袁西超 何 辉 杨 俭
(中国人民解放军电子工程学院 合肥 230037)
论文设计并验证了基于位置信息融合的无人机战场通信态势感知方法,通过无人机在任务区域搜索时位置改变引起的信号强度的变化,反向推算出电台的位置,并且采用了几种手段有效减弱了噪声的影响,使得在信噪比较低的情况下仍能达到战场通信态势的精度需求,最后利用仿真验证了其有效性。
战场通信态势; 态势感知; 无人机; 位置信息融合
(Electronic Engineering Institute of PLA, Hefei 230037)
Class Number TN914
1 引言
本文中的战场通信态势是战场通信对抗电磁态势[1]的子集,主要关注敌方通信电台的数量、工作频率、位置分布的状态以及在空间域、时间域、频率域上的活动趋势[2]。战场通信态势感知是指通过某种手段快速搜索战场,获取相关要素信息并处理形成战场通信态势情报[3]。根据战场通信态势情报,可以辅助分析敌方力量编成、部署以及行动企图,可以辅助评估作战效果,可以引导通信侦察干扰行动,具有十分重要的意义[4]。在高技术战争条件下,战场上通信电台数量庞大、信号复杂、变化快速,传统的用于搜索截获、分析识别、测向定位的通信侦察手段难以适应未来战场通信态势感知的需求。本文提出的基于位置信息融合的无人机战场通信态势感知方法具有频段宽、速度快、自动化、适应能力强的优点,充分发挥电子战无人机的优势[5],能够生成快速更新的战场通信态势情报,可有效对接文献[6~7]描述的战场电磁态势感知体系。
2 方法概述
2.1 基本思想
无人机接收敌方电台的通信信号经过地—空传播路径,接近自由空间传播,侦察接收机输入端功率为
(1)式(1)中,Pr为侦察接收机输入端功率,Pt为发射功率,Gt发射天线在接收机方向增益,Gr接收天线在发射机方向增益,λ为信号波长,d为接收机与发射机的距离。从式(1)可以看出,Pr与d的平方成反比。由于无人机空中飞行,使得无人机与电台相对位置不断变化,导致d和Pr跟随变化。如果记录下无人机飞行位置与对应的Pr,则有可能根据式(1)反推出电台位置。
2.2 影响因素分析
实际上每个飞行位置对应的Pr不仅与d有关,还受到多种因素的影响。根据式(1)分析如下:Pt不是恒定值,而是受信息源变化影响;Gt与Gr受无人机与电台相对方位的变化影响;λ受信号频率影响;电台与无人机间的传播路径也不一定严格遵守自由空间传播,可能受地形地貌的遮挡和多径衰落影响;Pr的测量值还受到同时接收的背景噪声影响。
通过准确分析各项因素的影响,并采用合理手段进行消除或限制,是研究基于位置信息融合的无人机战场通信态势感知方法的基础。信息源变化因素,虽然其瞬时值变化较大,但其短时间的平均值变化较小。天线增益因素,假设天线均采用竖直全向天线,则天线增益不随方向改变,即使天线采用垂直极化定向天线,在天线主瓣方向内,也可近似认为天线增益不变。信号频率因素,由于以频率区分信号,因此信号存在则说明频率不变。传播路径因素和背景噪声因素难以预测,但其一般具有突发性,可以通过数学手段减弱其影响。因此,d以外的其他影响因素都可以在一定程度上有效限制或消除。
2.3 设备需求
为实现基于位置信息融合的无人机战场通信态势感知方法,通信对抗无人机系统应具备以下功能:
1) 侦察天线是竖直全向天线,或垂直极化定向天线。
2) 侦察接收机能够对信号放大、变频、采样变为信号数据。
3) 数据链设备能够实时将信号数据传输至地面控制站。
4) 地面控制站计算机能够流畅运行实现本方法的软件。
2.4 基于位置信息融合的无人机战场通信态势感知过程
1) 无人机起飞并前往任务区域。
2) 无人机按照任务航线规划在任务区域内搜索飞行。
3) 侦察接收机将任务频段内的信号变为信号数据,并实时传输至地面。
4) 地面控制站计算机运行实现本方法的软件,实时计算并标示电台的位置和频率信息。
5) 无人机将任务区域搜索一遍则同步刷新一遍任务区域的战场通信态势。
3 方法设计
3.1 基于无人机位置和信号频谱功率的电台位置求解
信号频谱功率是指将侦察接收机采集并传回地面的信号数据进行快速傅里叶变换,然后将信号频谱峰值附近谱线求和,用以表示接收信号功率。显然,信号频谱功率是一部分接收信号功率加上信号频带内的背景噪声功率。根据式(1)可得:
(2)
(3)
d2=(xuav-x)2+(yuav-y)2+H2
(4)
式(2)由式(3)、式(4)补充说明,p为信号频谱功率,σ为占接收信号功率的比例,ρ为传播路径因素的影响,根据影响因素分析,可将除d以外的其他因素归并为W,由此产生的误差通过后面的数学手段消除,(xuav,yuav)、(x,y)分别是无人机和电台的位置(直角坐标系表示),H为无人机相对电台的飞行高度。
无人机在任务区域搜索时不断采集电台信号并形成信号数据,每次信号数据和采集时的无人机位置都可以列出如式(2)所示的方程。由于只有x、y、W等三个未知数,因此可以任意抽出三个方程组成方程组求解,如式(5)所示。
(5)
式(5)中,三个方程里面的W实际并不相等,但差值不大,在此认为相等,因为无法准确计算它们的值。这样,就造成了解存在误差,多个解在一起就会表现出散点,需要进一步用数学手段找出最优解。方程组的解如式(6)所示。
(6)
a=K2+1
(7)
b= 2KB-K[2x1+P(-2x1+2x2)]
-[2y1+P(-2y1+2y2)]
(8)
(9)
(10)
(11)
(12)
式(6)由式(7)~式(12)补充说明。
3.2 经纬度坐标与直角坐标的转化
由于无人机和电台的位置一般用经纬度表示,而解方程组用直角坐标比较方便,因此应当进行经纬度坐标和平面直角坐标的变换。由于需要解方程组的区域范围不大,地球曲面可在小范围内近似为平面,因此可选择附近一点为坐标原点,利用经纬度距离换算公式求得无人机位置与原点位置的距离和方位,再通过三角函数换算为直角坐标。同理,最终的电台位置也可反向换算为经纬度坐标。
3.3 信号自动判决门限的设定
实际信号中信号强度和噪声强度都在不断变化,判决信号存在与否的门限也应当跟随变化,称为信号自动判决门限。信号自动判决门限由信号数据频谱的均值和方差来表示,如式(13)所示。
J=mean(F)+k*var(F)
(13)
式中,J为判决门限,F为信号数据经快速傅里叶变换后频谱的模,其长度为信号数据长度的1/2,mean(F)是F的均值,var(F)是F的方差,k为系数,可根据信号和噪声情况人工调整。
3.4 信号频谱功率曲线的生成
信号频谱功率曲线是指信号频谱功率随采集次数变化的曲线,表示不同无人机位置的不同信号强度。生成信号频谱功率曲线包括四步:
1) 根据信号自动判决门限,判决信号存在,并求出信号频带。
2) 在信号频带内求出峰值频率,作为信号中心频率。
3) 将中心频率左右Δf内的谱线求和,作为信号频谱功率。
4) 按每次采集并处理得到的信号频谱功率画出信号频谱功率曲线。
其中,Δf可根据信号带宽情况人工调整。
3.5 信号频谱功率曲线的平滑
由于噪声的影响,每次采集并处理得到的信号频谱功率都存在误差,表现为信号频谱功率曲线在一定程度(与信噪比相关)内忽高忽低,严重影响方程组求解的准确性,因此应利用噪声的随机特性对信号频谱功率曲线平滑处理,减弱噪声的干扰。具体方法是将各次采集点的信号频谱功率变为其前后m次采集点信号频谱功率的均值,m可根据信号情况和求解情况人工调整。
3.6 电台位置解集的生成
求解电台位置解包括三步:
1) 挑选采集点。在信号功率频谱曲线中,较大的值能更好反映信号强度,因此挑选的方法是从大到小依次选出3*n个采集点。
2) 组成方程组。将选出的采集点的对应的无人机位置和信号频谱功率,组成n个方程组。
3) 方程组求解。根据式(6)求出n个方程组的解。
3.7 电台镜像位置的消除方法
从式(6)可以看出,每个方程组都有2套解,其中1套解表示了电台的位置,另1套解是电台位置相对无人机位置的镜像位置,应予以消除。
根据方程组求解的原理,画出图1、图2、图3,图中有向线段表示无人机航线,实心五角星表示电台位置,空心五角星表示电台镜像位置,黑方块表示采集点,圆圈的半径表示方程组求解过程中得到的无人机与电台的距离。由图1看出,无人机直线飞行时难以分辨镜像位置。从图2、图3看出,无人机弧形航线飞行时,无论电台在内侧还是外侧,镜像位置的点都比较散,因此可以利用这一特征将镜像位置识别并消除。

图1 直线航线

图2 弧形航线内侧

图3 弧形航线外侧
3.8 电台位置解集的优化
由于噪声的影响,n个方程组的解不在同一位置,而是出现散点,为进一步减弱噪声的干扰,可去掉较为分散的点,方法包括三步:
1) 计算n个解表示的点之间的距离。
2) 计算每个点到其他点之间距离的总和。
3) 按照每个点的距离总和由小到大排序,舍弃后q%的点。
其中,q可以根据解的情况人工调整。
3.9 最优电台位置估计
优化后的解集是较为集中的散点,而最终解必须是1个点,因此采用求重心的方法估计出最优电台位置。具体方法是分别求x坐标和y坐标的均值。
4 仿真验证
4.1 仿真条件
任务区域范围为200km×200km,设置两部电台分别在(100,40)、(120,80),电台信号中心频率分别为70MHz、80MHz,均为BPSK调制,信息码速率为100KHz,采样频率为200MHz,无人机沿航线飞行,相对电台的飞行高度为3000m,仿真如图4、图5所示。
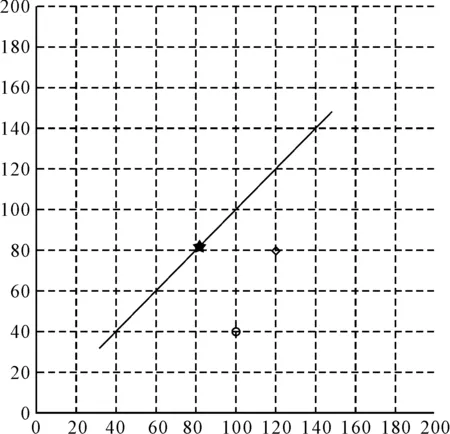
图4 任务区域仿真图
图4中直线为无人机航线,航线上的“★”表示无人机当前位置,“”表示电台位置。

图5 信号频谱图
图5中可以看出在背景噪声中70MHz、80MHz处的信号频谱。
4.2 无噪声条件下信号频谱功率曲线与解集
下面仿真验证式(6)求解是否正确。关掉噪声,生成信号频谱功率曲线如图6所示,图中横坐标表示航线上的采样点数,通过式(6)求解电台位置如图7所示,图7中航线两侧的点为求解得到的电台位置,其中1个点与电台真实位置重合,另1个点在镜像位置。

图6 无噪声条件下信号频谱功率曲线图
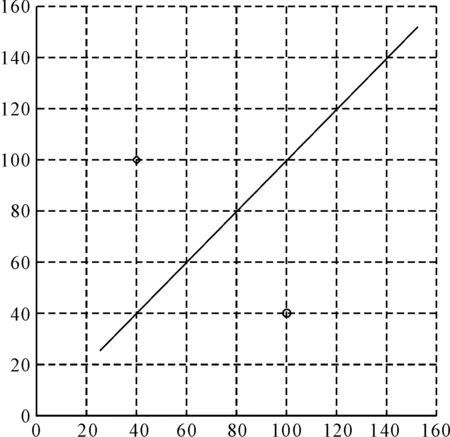
图7 无噪声条件下求解电台位置
4.3 噪声条件下信号频谱功率曲线的平滑
下面检验噪声对求解的影响,在噪声条件下信号频谱功率曲线如图8所示,由其求解得到的电台位置如图9所示,可以看出由于噪声影响,电台位置变为了散点。
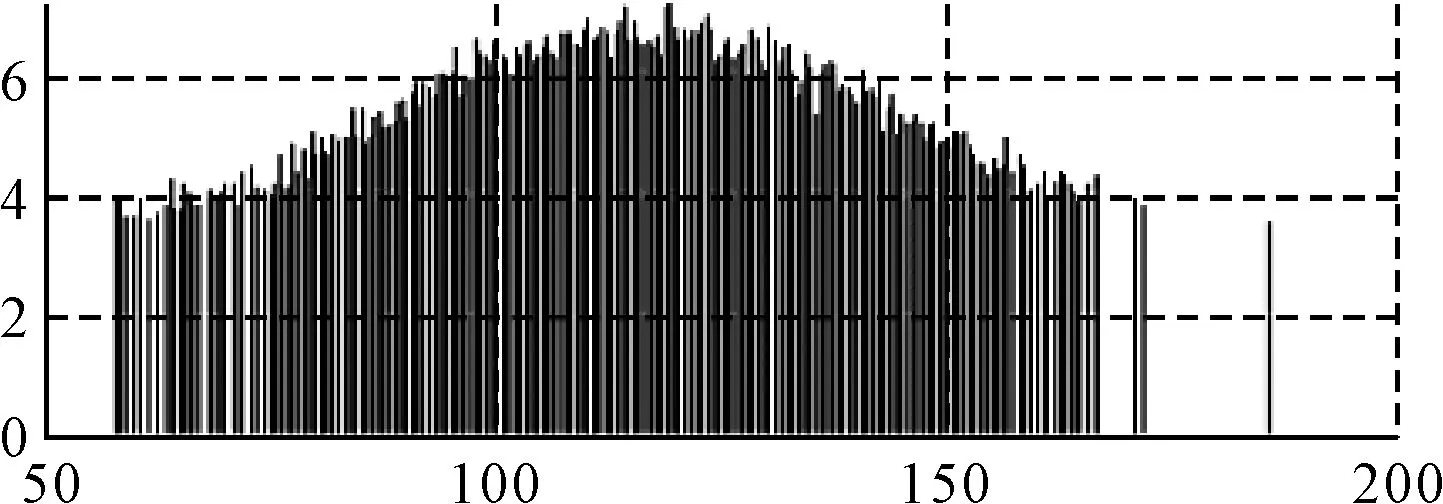
图8 无平滑处理的信号频谱功率曲线图

图9 无平滑处理求解电台位置
下面对图8所示的信号频谱功率曲线进行平滑处理,结果如图10所示,由其求解得到的电台位置如图11所示,可以看出散点情况得到了较好收敛。
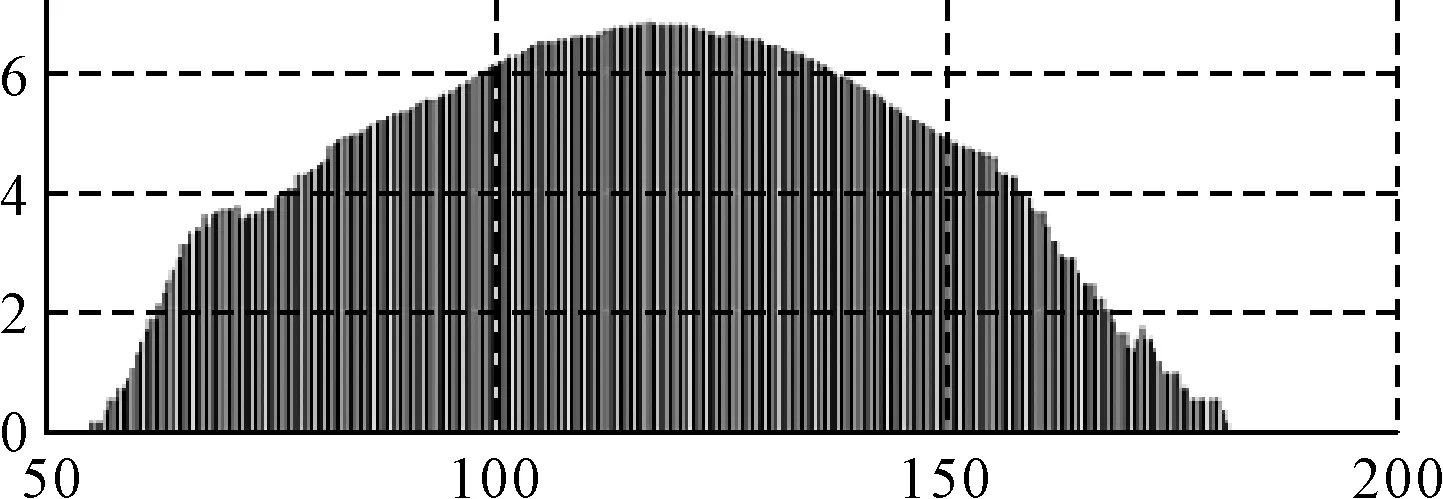
图10 平滑处理后信号频谱功率曲线图

图11 平滑处理后求解电台位置
4.4 直线航线与弧形航线的解集对比
下面验证通过弧形航线消除镜像位置。当电台位于弧形外侧时,镜像位置的散点对比如图12所示。当电台位于弧形内侧时,镜像位置的散点对比如图13所示。由图12、图13可以看出,镜像位置的散点均较真实位置的情况严重,电台位置弧形内侧时尤为明显。
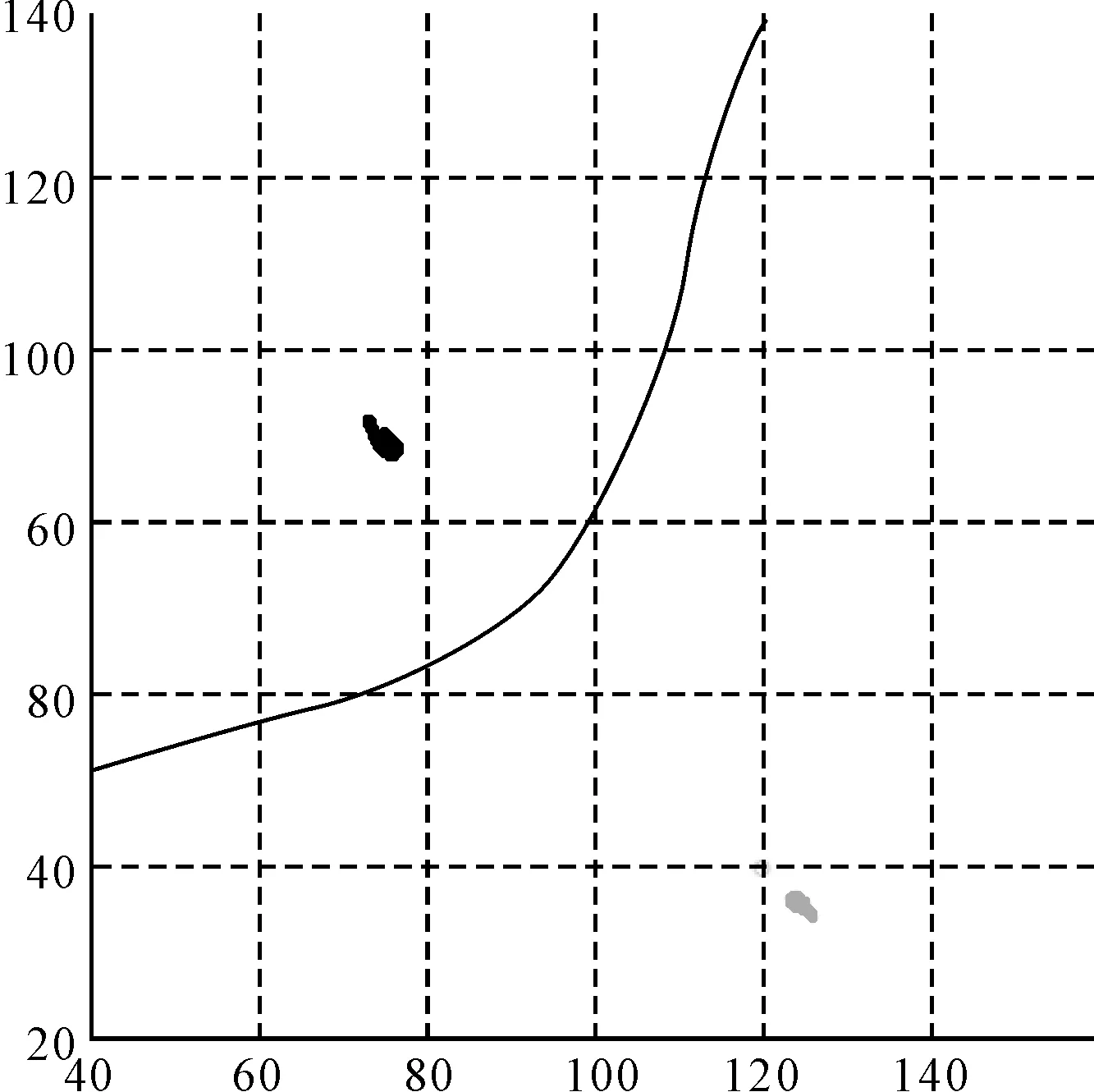
图12 电台在弧形外侧的镜像对比图
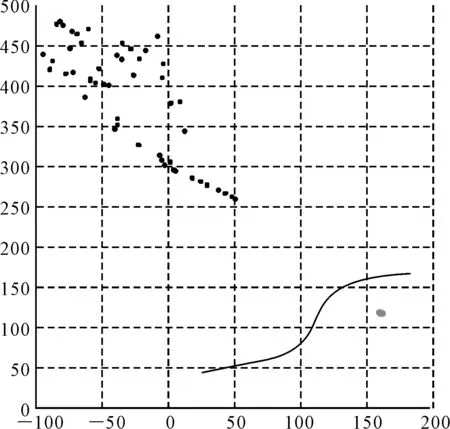
图13 电台在弧形内侧的镜像对比图
4.5 噪声与弧形航线条件下的最优解与真实位置对比
下面验证采用全部减弱噪声影响的手段时得到的最优解位置与真实位置的偏差。在如图14所示的信号最强时信噪比条件下,得到如图15所示最优解与真实位置偏差。图15中“★”号为最优解位置,其与真实位置偏差约为800m。该仿真验证了在较低信噪比条件下基于位置信息融合的无人机战场通信态势感知方法得到的最优解能够满足战场通信态势标绘的精度需求。

图14 信号最强时的频谱图

图15 最优解位置与真实位置偏差
5 应用前景分析
空中测量电台位置的手段主要有单站移动测向定位和双站交叉测向定位,虽然定位精度较高,但均需要多通道接收机和测向天线阵,并且同时只能对1个信号测向定位,难以满足战场通信态势快速更新的需求[8~11]。本文介绍的基于位置信息融合的无人机战场通信态势感知方法使无人机在任务区域搜索一遍就可以标出任务频段内的所有电台的位置,具有显著的搜索效率,并且设备需求容易达到,能够充分发挥无人机目标小、成本低、无人员伤亡的优势,虽然估计的电台位置精度不高,但用于引导通信侦察、通信干扰和分析敌方部署和行动已足够,采用本方法快速更新的战场通信态势情报具有重要意义。
6 结语
本文从战场通信态势需求出发,设计并验证了基于位置信息融合的无人机战场通信态势感知方法,从基本思想和影响因素分析入手,逐步完成了信号频谱功率和飞行位置关系的方程组组建和求解,减弱噪声影响的几种手段的设计,并使用Matlab进行了仿真,验证了方法的有效性。虽然本方法基于全向天线和常规定频信号设计,但对使用定向天线的信号以及直接序列扩频信号、跳频信号也可能有效,可进一步研究。
[1] 周峰,何俊,胡振彪.仿真系统中通信对抗电磁态势显示研究[J].四川兵工学报,2011,32(4):77-80.
[2] 汤扣林.电磁态势的气象环境影响分析[J].指挥信息系统与技术,2014,5(5):20-24.
[3] 周倜,王小非,陈炜.海战场电磁态势感知模型[J].火力与指挥控制,2013,38(8):1-5.
[4] 康安康.一体化通信对抗威胁评估与资源分配方法研究[J].信息通信,2015(12):219.
[5] 蒋盘林.无人电子战作战平台系统与技术发展研究[J].通信对抗,2008(3):3-8.
[6] 冯德俊,朱江,李方伟.战场电磁态势感知关键技术研究[J].数字通信,2013,40(5):20-23.
[7] 薛磊,沈阳,乔亚.战场电磁态势融合感知技术框架研究[J].指挥控制与仿真,2016,38(2):1-5.
[8] 汤扣林,刘韵,赵春东.单站测向定位技术研究[J].火力指挥与控制,2009,34(12):112-116.
[9] 韩慧珠.单站测向无源定位技术研究[D].成都:电子科技大学硕士学位论文,2014.
[10] 徐冉.无源测向定位算法研究[D].长春:长春理工大学硕士学位论文,2013.
[11] 张秋月.新型无源探测系统中的无源定位技术研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2005.
A Method of Battlefield Communication Situation Awareness by UAV Based on Position Information Fusion
YUAN Xichao HE Hui YANG Jian
The method of battlefield communication situation awareness by UAV based on position information fusion was designed and validated in the paper. The change of signal intensity was brought on the change of UAV position when UAV was searching in mission area, the method reckoned the broadcasting station position reversely, and weakened the influence of noise effectively by several artifices. The result of the method could reach the precision requirement of communication’s situation on battlefield. Finally, the availability of the method was validated by simulation.
battlefield communication situation, situation awareness, UAV, position information fusion
2016年6月12日,
2016年7月30日
袁西超,男,硕士,讲师,研究方向:电子对抗无人机作战运用、通信对抗技术、计算机仿真技术。何辉,男,硕士,讲师,研究方向:通信对抗技术、电子对抗情报。杨俭,男,硕士,助教,研究方向:电子对抗无人机作战运用、雷达对抗技术。
TN914
10.3969/j.issn.1672-9730.2016.12.012
猜你喜欢
社会科学战线(2022年4期)2022-06-15
中学生数理化·七年级数学人教版(2022年5期)2022-06-05
当代党员(2020年20期)2020-11-06
语数外学习·初中版(2020年5期)2020-09-10
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国外汇(2019年16期)2019-11-16
小康(2018年23期)2018-08-23
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
