
美海军DDG-1000舰任务系统关键信息技术分析*
2017-01-11 03:34杨心武
舰船电子工程 2016年12期
姜 艳 杨心武 吴 明 林 健
(1.91404部队 秦皇岛 066001)(2.武汉船舶通信研究所 武汉 430205)
美海军DDG-1000舰任务系统关键信息技术分析*
姜 艳1杨心武2吴 明2林 健2
(1.91404部队 秦皇岛 066001)(2.武汉船舶通信研究所 武汉 430205)
论文简要回顾了美国海军最新一代驱逐舰DDG-1000的项目发展历史、罗列了其十大关键技术,并介绍了其任务系统组成,重点分析了任务系统中所采用的全舰计算环境、多功能雷达、综合水下作战系统和全舰隐身设计四大关键信息技术。在此基础上,从DDG-1000信息技术发展特点的角度对比分析了我海军舰艇与其差距。
DDG-1000;任务系统;全舰计算环境;多功能雷达;水下作战;隐身设计
(1. No. 91404 Troops of PLA, Qinhuangdao 066001)(2. Wuhan Maritime Communication Research Institute, Wuhan 430205)
Class Number TP393.09
1 引言
作为美国海军新一代多任务水面作战舰艇,DDG-1000任务系统在船体结构和材料、推进系统、电力系统、船舶辅助系统、作战系统等方面采用了众多先进的技术。作战系统的改进在该项目中占据最主要的部分,而信息技术又是作战系统中使用最为重要和广泛的技术之一。
2 DDG-1000项目背景
DDG-1000是美国海军为应对在21世纪中将会面临的各种威胁而建造的多任务水面战斗舰艇,在对陆攻击、减少船员、增强机动性和降低外部特征等方面做了诸多改进。自20世纪90年代初美国海军启动DDG-1000项目以来,该项目经历了一系列曲折的历程。其中,一些重要的时间节点包括[1-2]:
1992年,美国海军提出“21世纪驱逐舰技术研究”的概念,该概念被纳入美国海军新一代水面作战舰艇框架之中,即“21世纪水面作战”(Surface Combatant of 21th Century, SC-21)。1997年,该项目正式立项,并更名为“DD-21”,以体现出面向21世纪的驱逐舰;2000年,该型舰的首舰被命名为“朱姆沃尔特”号,以纪念同年去世的美国上将朱姆沃尔特。2001年11月,由于经费原因,美国防部宣布停止DD-21计划,随后以DD(X)计划取代之。2002年4月,美国海军确定由诺斯罗普·格鲁曼公司担当DD(X)的主承包商。2006年4月,DD(X)的项目代号改为DDG-1000,标志着该级舰的论证已基本结束,进而转入施工设计和建造阶段。2008年7月,同样由于经费原因,美国海军终止了“朱姆沃尔特”级的批量建造计划(最初预计32艘),改为仅建造3艘。首艘朱姆沃尔特号(DDG-1000)、二号舰麦可·蒙苏尔号(DDG-1001)和三号舰林登·约翰逊号(DDG-1002)计划分别于2015年、2016年和2018年交付海军,但受复杂技术问题影响,截至2016年1月,三艘舰的完成度分别为98%、84%和43%。
作为美国新世代顶级水面战舰,DDG-1000凝结了全新研发的最顶尖的科技结晶,本级舰从舰体设计、机电动力、指管通情、网络通信、侦测导航、武器系统等方面突破了多项技术难关。其中,美国海军总结出十大关键技术并指定承包商通过工程发展模型进行实际测试,如图1所示。这十大关键技术包括:

图1 DDG-1000十大关键技术
1) 穿浪型内倾船舷舰体(Wave Piercing Tumblehome Hull)
2) 先进舰炮系统(Advanced Gun System, AGS)
3) 集成复合材料舰岛与孔径(Integrated Composite Deckhouse and Aperture, ICDHA)
4) 全舰计算环境(Total Ship Computing Environment, TSCE)
5) 多功能雷达(Multi-function Radar, MFR)
6) 综合水下作战系统(Integrated Under Sea Warfare, IUSW)
7) MK-57垂直发射系统(Peripheral Vertical Launch System, PVLS)
8) 红外线模型(IR Mockups)
9) 自动火控抑制技术(Automatic Fire Suppression System, AFSS)
10) 综合电力推进系统(Integrated Power System, IPS)
在单个新研舰艇上同时采用如此多的新技术在美国海军造船史上实属罕见,它违背了美国海军关于在新研舰艇上采用新技术的数量限制在2~3个的设计原则,同时也反映出美国海军新的权衡策略。
3 DDG-1000任务系统组成
如图2所示,DDG-1000任务系统包括外部通信系统、传感器系统、舰船域控制系统、武器控制系统、指挥控制和情报(C2I)、训练任务和保障等几部分,各部分外围资源通过分布式适配处理器(DAP)接入相应的控制系统。各控制系统又作为TSCE核心的一部分与指挥、控制及情报(C2I)无缝融合[3]。
DDG-1000的任务系统的主要分系统包括[4]:
1) 外部通信系统(EXCOMMS)
作为DDG-1000的C3I系统的一部分,外部通信系统为DDG-1000执行任务期间提供与其它岸基、空中和海上平台以及码头之间的话音、数据和视频通信。外部通信系统由卫星通信、视距通信、海军通用数据链、信息安全、通用阵列单元、协同作战处理、集成通信控制软件等七部分组成。
2) 多功能雷达(MFR)
多功能雷达使DDG-1000获取对海和对空优势,支持近距离压制敌方水面舰艇和飞机。多功能雷达为X波段(AN/SPY-3)相控阵雷达,采用通用信号处理设备,可提供水面水平搜索以及空中三维坐标搜索能力。X波段雷达一部分支持导航功能,具备高功率和低功率两种导航模式。
3) 敌我识别(IFF)
敌我识别用于防空作战和反舰作战任务,与询问及应答系统协同工作,用于快速进行友方作战平台身份识别、跟踪和控制。敌我识别包括三部分硬件:询问单元、应答单元和电扫描天线单元以及相应的软件。
4) 综合水下作战系统(IUSW)
综合水下作战系统为DDG-1000提供指挥反潜作战、鱼雷防御、反水雷、搜索救援等能力,使其具备极大地水下优势。综合水下作战系统集成了舰壳声纳、拖曳声纳、拖曳反水雷单元等用于空中、水面和水下目标探测的声纳系统以及相应软件。
5) 光电/红外系统(EO/IR)
光电/红外传感器包括软件和硬件两部分,用于C2系统侦察、测距特定目标以及报告航迹,由位于甲板上主要阵面之上的5个万向光电传感器和相应的电子模块设备组成,另外还包括内嵌于C2系统中的控制和生成航迹的侦察和跟踪软件、目标检测算法等。
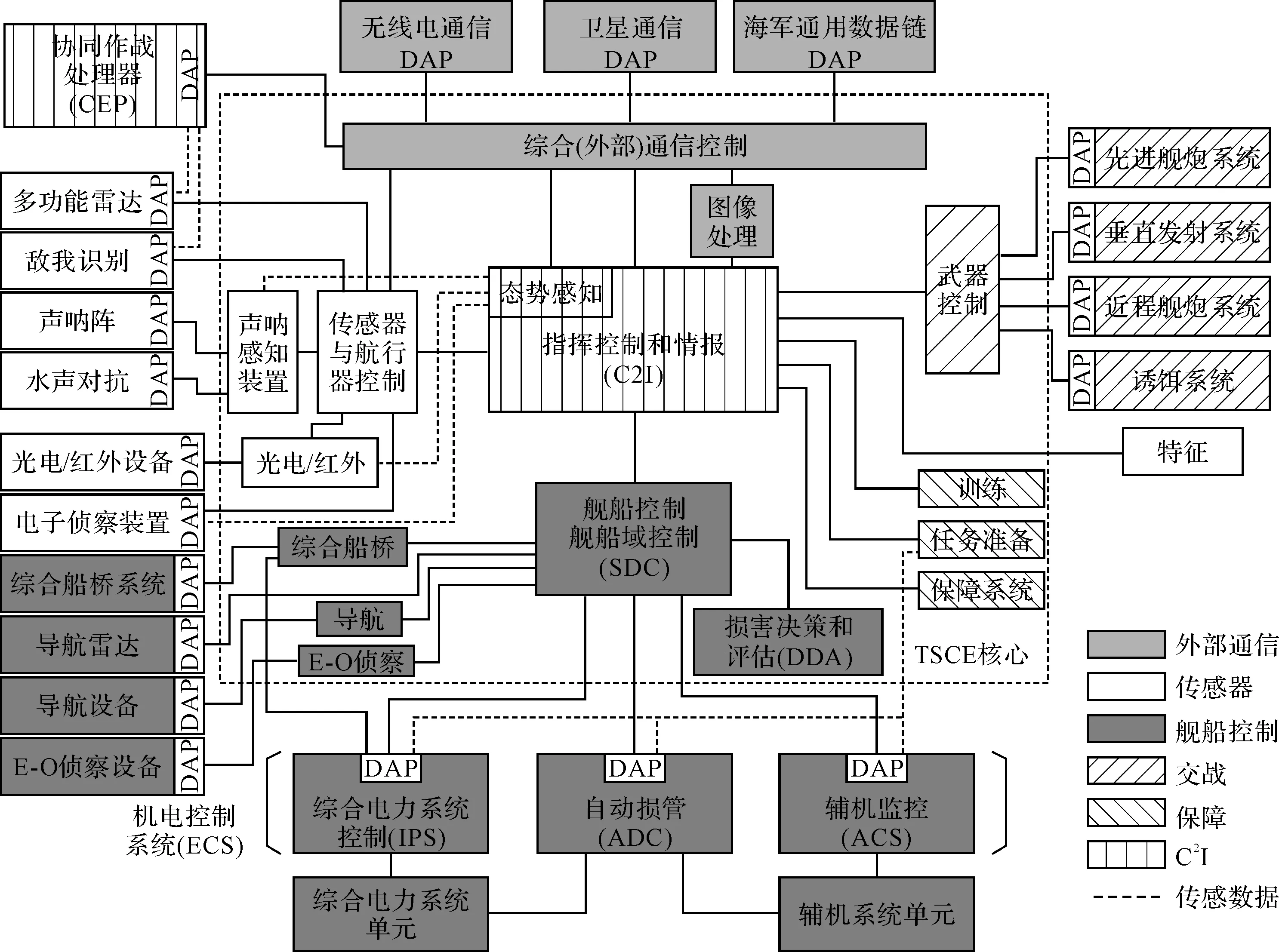
图2 DDG-1000任务系统组成框图
6) 舰船控制系统(SCS)
舰船控制系统也叫舰船域控制系统(SDC),它为DDG-1000舰员提供分级、集成的舰船平台控制软硬件。SCS软件架构允许分级进行自动化监视、控制和配置SCS设备,从而降低人员需求。从舰桥或舰船任务中心,SCS可为DDG-1000协调、控制和监视导航、动力、电力、机械等装置,另外还具备损管控制功能。
机电控制系统(ECS)是SCS的一部分,是一个相当先进和高度集成的机电设备控制系统。ECS在层次上支撑SCS为作战系统提供舰船机动和电力,其主要由三个部分组成:综合电力系统(IPS)控制、自动损管(ADC)和辅机控制系统(ACS)。ECS是一个分布式实时控制系统,用于自动监视和控制DDG-1000机电设备,实现电力自动化和辅机控制自动化。ECS采用网络分布式控制单元(DCU)和远程终端单元(RTU)作为与全舰船机电设备之间的接口,用于监视和控制传感器、执行机构、接触器和电力设备等。
7) 先进舰炮系统(AGS)
先进舰炮系统是一个全自动、垂直装弹、稳定的155mm单管舰炮系统,能够按照存储、初始化/可编写的程序填装和发射弹体以及推进装药。其主要任务是对陆攻击作战,可以在DDG-1000滨海交战范围内精确、快速、大范围火力支援视距之外的地面和和先遣力量。DDG-1000携带两套完整的AGS系统——Mount 61和62。两套系统的配置在甲板之上完全相同,但在甲板下稍有区别。
8) 垂直发射系统(MK57 VLS)
MK57垂直发射系统是一个通用的、无人操作的导弹发射系统,能够自动填装、准备和发射导弹以支持DDG-1000的任务执行,包括对陆攻击、综合空中和水面支配抢占、综合水下支配抢占。MK57发射系统从甲板下对80个发射单元填装导弹,可瞄准水面360°半球范围内任意目标。
9) 近程舰炮系统(CIGS)
近程舰炮系统可以帮助DDG-1000获得综合空中和水面支配地位,可压制近距离的敌方水面舰船和飞机。CIGS也可以支援军事行动,比如海上封锁、海上执法或人质营救。两套CIGS安装在船艉悬挂装置处。炮塔上装有机关炮(MK44 MOD 2)和一套先进的发射控制系统,包括弹道解算计算机、电光传感器、人眼安全激光测距仪。系统使用前视红外传感器、低光电视摄像机、人眼安全激光测距仪以及一套闭环跟踪系统来提高精度,以应对小型高速目标。系统可在本地炮塔内操作,或者在作战信息中心的远端舰炮站操作员面板远程操作。MK44 MOD 2是一款单管、开放式枪栓、双补给、电力供电、链条驱动的机关炮。弹药库可容纳424发炮弹,双补给方式支持射速200发/分钟。
10) 协同作战能力(CEC)
CEC为具备集成火控能力的传感器网络。装备有CEC的实时协同作战平台,可通过实时、视距、高速的分布式网络来共享各平台防空搜索传感器获取的协同监测数据,能够有效提高防空和反导作战能力。CEC采用精确定向通信,具备很强的抗干扰能力。各协同作战平台采用独立的高容量并行处理算法来融合传感器数据,形成一个高质量跟踪态势。CEC数据可看作为由各单个协同作战平台防空反导传感器最大能力的总集合,并且将其输入到每个协同作战平台的武器系统。CEC极大地提高战斗防御纵深,包括针对本地和区域的现行及未来空中导弹威胁。
11) 全舰计算环境(TSCE)
全舰计算环境(TSCE)提供DDG-1000所有的计算资源及相关软件。TSCE为舰船平台、作战系统和支撑保障系统提供单个计算环境,为应用/功能系统软件提供中间件平台,用于建立和执行其功能。TSCE应用软件、硬件和软件基础设施一同构成计算资源的绝大部分。
12) 综合电力系统(IPS)
DDG-1000的综合电力系统(IPS)由四台大功率燃气轮机发电,产生供推进系统、舰船服务和作战系统所需的电力,输出电功率可达78MW以上,远超美军现役主力驱逐舰DDG-51的7.5MW输出电功率。IPS的高效灵活的电力分配允许大幅度降低能源消耗,并且适合高能武器(如电磁轨道炮和高能激光武器)以及传感器的使用。
此外,DDG-1000上还应用了通用阵列电源系统(CAPS)和通用阵列冷却系统(CACS)。CAPS完成全舰集成电力系统的船用电压到其它设备供电电压转换,支持对多功能雷达、敌我识别、电子战、密码、外部通信等多种分系统供电。CAPS是一套分布式电力系统,包括两套配电设备和四套变电设备。CACS为多功能雷达、外部通信系统天线阵列提供液冷将热量交换给舰平台提供的冷却水。CACS是一套分布式冷却系统,冷却设备分为三个独立部分,每部分冷却回路可单独操作,包括冷媒输送至双波段雷达和外部通信设备以及对其的监视和控制。冷却设备由冗余设计的泵、一个热交换器和过滤系统组成。
通过上述先进技术和系统的应用,DDG-1000战技性能大幅提高,相比美国海军现役主力驱逐舰DDG-51,其在火力支援和防御反舰巡航导弹方面的能力提升了3倍,整体雷达反射截面积(RCS)减少了50倍,综合防御能力是DDG-51的10倍,浅水域对抗水雷的作战范围也增大了10倍。然而,DDG-1000的人员编制只有142人,比DDG-51的314人减少了62%。
4 DDG-1000任务系统关键信息技术
在DDG-1000的十大关键技术中,与任务系统中信息部分紧密相关的技术包括全舰计算环境(TSCE)、多功能雷达(MFR)、综合水下作战系统(IUSW)和全舰隐身设计(穿浪型内倾船舷舰体、集成复合材料舰岛与孔径和红外线模型结构)四项关键技术。
4.1 全舰计算环境(TSCE)
全舰计算环境(TSCE)基于高性能的计算、实时/非实时的面向服务体系架构(Service-Oriented Architecture, SOA)、实时发布订阅(Data Distribution Service for Real-Time System,DDS RT)、虚拟化、一体化网络等商用成熟的技术实施集成,完成DDG-1000上的侦察探测、指挥控制、通信、导航、损管、动力、机电等信息系统的全部处理运算。全舰计算环境的应用使得美国海军舰船信息系统从传统的分系统拼装式集成转变为基于集中计算的开放式集成模式,是舰船信息系统体系结构和集成方式的根本性变革[5]。
1) TSCE体系架构
TSCE符合五级开放式体系结构,由硬件设备层、操作系统层、分布式中间件层、服务接口层、各类子系统应用软件以及资源管理等构成,共同形成一个开放的、虚拟的计算环境,如图3所示[6-8]。
硬件设备层采用商用成熟的符合IEEE、TIA、IETF标准的计算、存储、显示、网络、交换机、电缆等产品,这些设备共同构成了TSCE的计算和网络基础。
操作系统层运行在硬件层的计算机上,采用了符合POSIX标准的操作系统和驱动程序,包括Linux、Lynx和Windows等操作系统。
中间件层位于操作系统层和应用程序层之间,用于这两层之间的消息通信和资源共享,并可实现业务的快速响应。中间件采用了对象管理组织(OMG)发布的规范和标准,例如公共对象请求代理机构(COBRA)和数据分发服务(DDS)[9]。
公共服务层为上层应用提供信息交互、处理和管理等软件服务,例如时间同步、数据记录、输入/输出控制和电源管理等。
应用层面向用户提供作战任务的操作界面和支持,在DDG-1000上,应用软件包括显示、传感、武器、训练、指控、外部通信等应用方面。
另外,在管理层面,全舰计算环境具备强大的资源管理功能,可对硬件层、操作系统层、中间件层以及应用层进行实时监控、向全舰发布系统实时状态、统筹和规划全舰指控资源,保证资源动态实时分配。

图3 TSCE体系结构
2) TSCE基础设施
TSCE基础设施包括电子模块化封装箱(EME)、分布式适配处理器、网络设备、人机接口设备等几个部分。
电子模块化封装箱(EME)通过体积巨大、坚固的封装箱将由商用现货(COTS)硬件组成的任务系统电子设备与外部海上环境隔离,包括冲击、振动、电磁干扰和电磁脉冲等环境。同时,EME提供对商用货架设备正常工作所需的物理保护、噪声隔离、冷却以及电源制式等要求。如图4,DDG-1000共有16个这样的体积不等的封装箱,内部容纳了IBM刀片服务器、机柜及配套设备[10]。

图4 电子模块化封装箱(EME)
分布式适配处理器(DAP)是TSCE与其它应用系统信息交互的“网关”,包括接口硬件和软件两部分。DAP利用工控机或单板计算机实现,可以支持多种标准的接口适配和协议转换,具有较强的接口扩展能力。图5分别为嵌入式和网关式的DAP。

图5 分布式适配处理器(DAP)
TSCE的网络包括有线网络、无线网络以及其上运行的软件几部分组成,可提供语音、视频、数据的传输和交换以及内部监控等功能,实现了战术和非战术网络的一体化,并提供安全、可靠的网络通信服务。TSCE有线网络采用了基于光纤网络的“核心+接入”两层结构,包括3台核心交换机(30G带宽)和20多台接入交换机(10G带宽),图6展示了TSCE与机电控制系统(ECS)的两层网络连接结构。
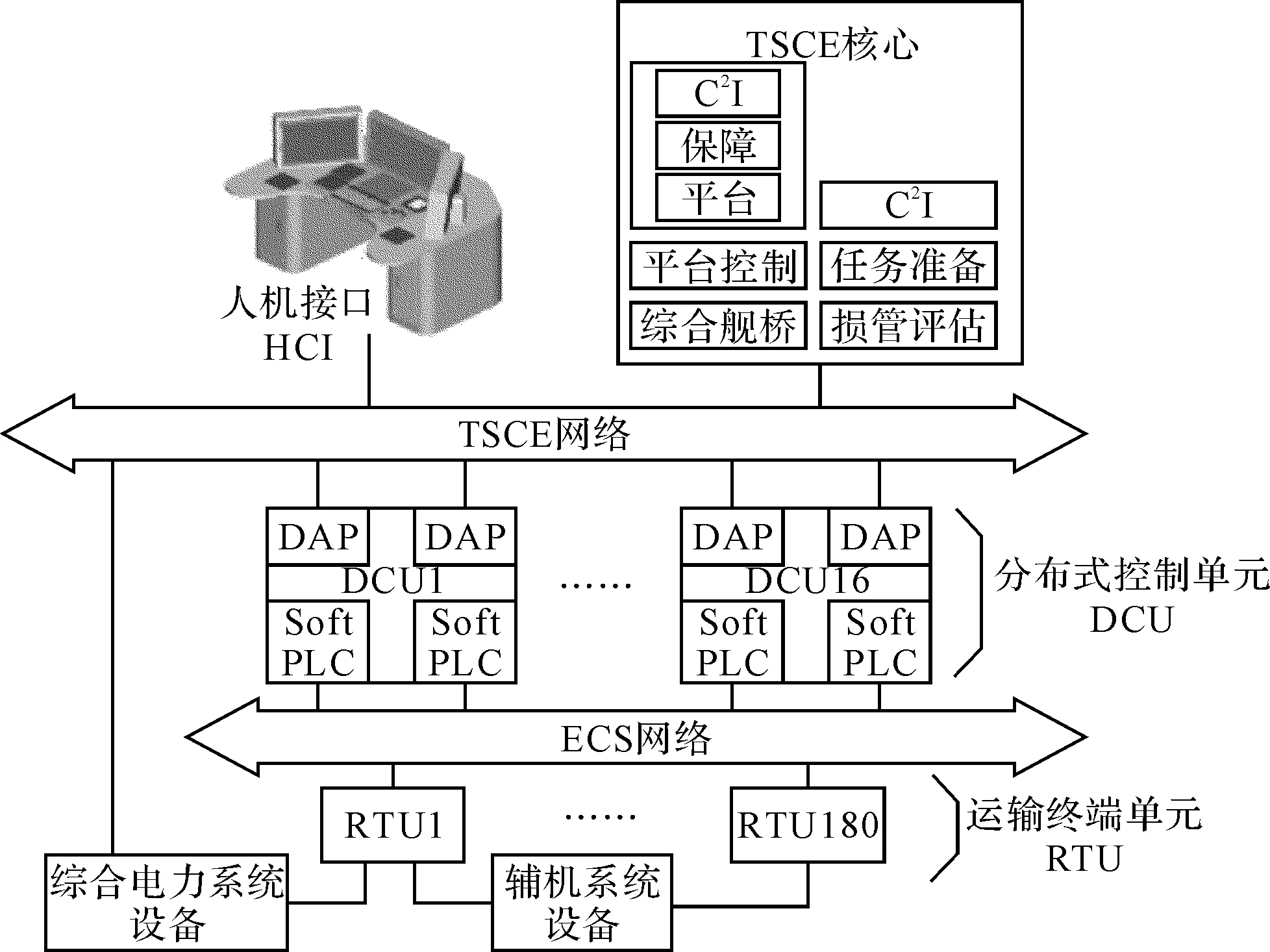
图6 TSCE网络与ESC网络
人机接口设备为可支持显示和应用分离的标准显控台,可以实现在任意位置显示需要的信息,而不受显示设备的限制。显控台包括显控终端和人机接口服务组件,并提供人机交互界面。人机接口设备的设计为舰上灵活分配操作员、战位功能或任务提供了便捷性。图7显示了DDG-1000任务中心和舰桥使用的3屏显控台以及触摸屏设备。

图7 人机接口设备
TSCE以开放式体系架构为框架、以基础设计为平台搭建的计算支持,能够很好地解决舰上传感、武器、训练、指控、通信等分系统在集成时的“烟囱”问题,实现各分系统应用软件计算资源的统一调度和管理。通过这种开放式的集成模式替代以往的分系统拼装式集成模式,可使系统获得易升级、可重构、免维护、更强的生命力、更高的自动化能力以及更少的人员配置需求等优势。
4.2 多功能雷达(MFR)
DDG-1000最初设计的主要雷达系统为双波段雷达系统(Dual Band Radar,DBR),包括由雷神开发的X波段多功能雷达(Multi-Function Radar,MFR)AN/SPY-3和洛克希德·马丁开发的S波段远程广域搜索雷达(Volume Search Radar,VSR)AN/SPY-4两个部分。
MFR主要完成低空、超低空搜索。一部MFR即能够完成SPS-67、MK95、SPQ-9B、MK23 TAS(Target Acquisition System)和SPN-41/46等5部雷达的功能,并且还支持导航功能。VSR主要完成远程空域搜索,在MFR进行目标照射时,VSR也可进行低空搜索,实现雷达资源的合理分配,达到精确跟踪的目的。MFR和VSR两者配合使用,满足舰上需要的雷达功能,包括对空/平面搜索、早期预警、防空自卫及对海对地作战所需的跟踪/定位/火控。图8以概念图的形式显示了DBR的功能和工作流程[11]。
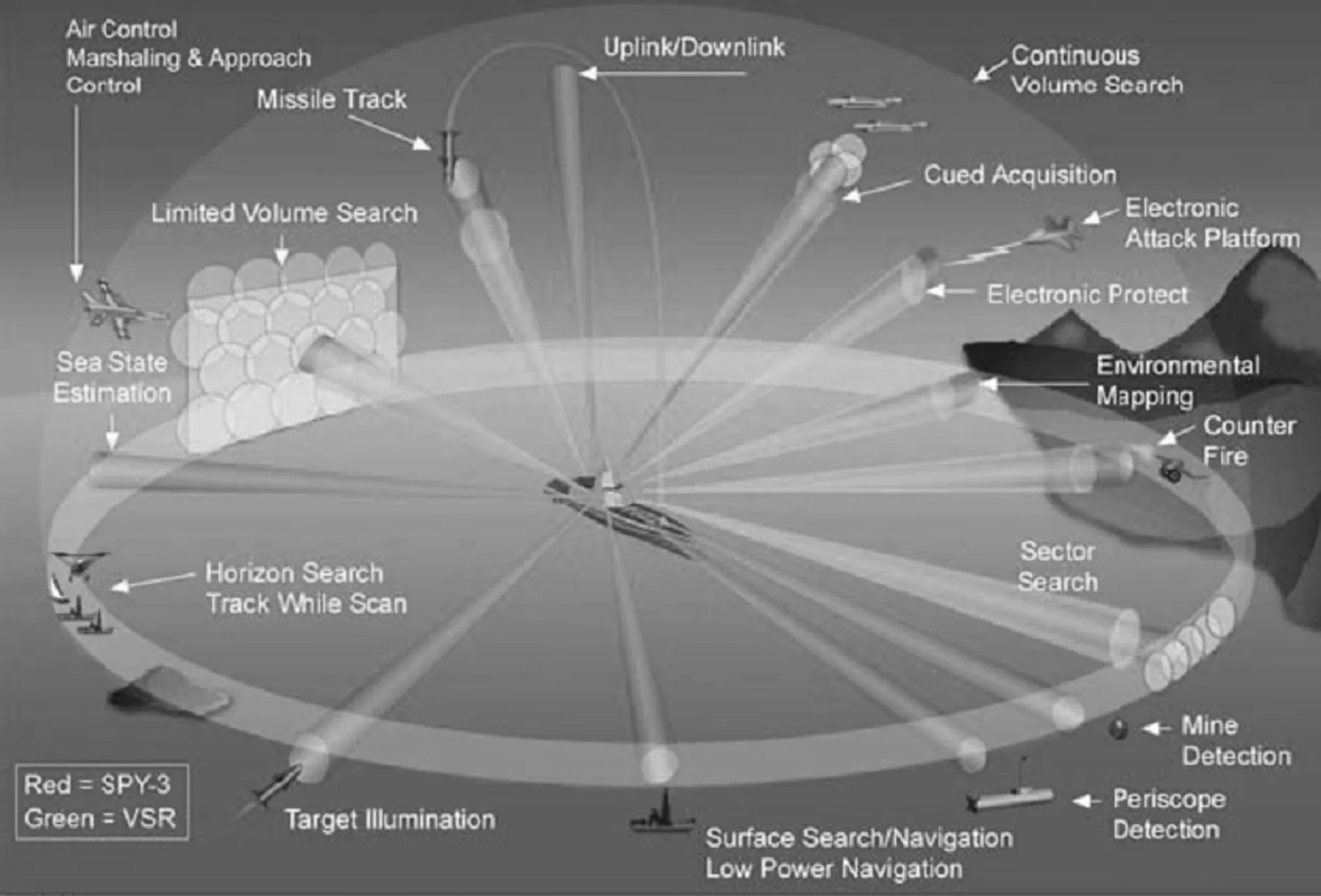
图8 双频段雷达(DBR)工作概念图
双波段雷达系统组成如图9所示,阵面天线设计和信号处理是该型雷达最重要的组成部分。
1) 阵面天线
在雷达阵面天线设计方面,由于相控阵天线的电扫瞄波束在偏离轴心一定角度之后就会明显变宽,造成天线增益、雷达侦测距离和解析度的显著降低,因此,绝大多数单面相控阵天线波束扫瞄方位角极限为120°(±60°)。这种限制下,虽然三面天线就能覆盖360°方位角,但为了确保目标通过两面天线波束交界时仍能有效持续跟踪,一般相控阵雷达将单面天线的扫瞄方位角限制在90°,所以传统舰船多采用四面天线阵。而DDG-1000的MFR与VSR采用三面天线的构型,单面天线的波束覆范围几乎达到电子扫瞄天线的极限,这意味着美国厂商在信号控制与处理技术上已经实现突破,可以让扫瞄方位提升到天线实体能力的理论上限。另一方面,减少一面天线就意味着减少25%的体积重量,同时也控制了系统成本。

图9 双波段雷达系统组成
2) 信号处理
在信号处理方面,DBR系统使用IBM商用现成超级计算机进行控制与信号处理,高性能COTS服务器利用雷达和数字信号处理技术进行信号分析,包括通道均衡、杂波滤波、多普勒处理、脉冲编辑,并可执行多种先进电子保护算法。数据处理器处理作战系统的指令,包含资源管理器、跟踪器以及指控处理器。IBM公司的超级计算机也被整合在模块化电子封装箱(EME)中。由于共用同一台计算机处理,两波段雷达能够同步工作,充分发挥各自的功能,使任务分配、功率输出、频率/频带、波形/波束形成、雷达辐射、跟踪质量等达到最佳状态。另一方面,利用商用现成系统可降低开发成本,提高系统可靠性与可维护性。
2010年6月,美国国防部因为海军沉重的预算压力,为节省成本决定删去DDG-1000的VSR雷达系统,只保留MFR。由于取消VSR,AN/SPY-3雷达通过软件升级使其具备原VSR的部分功能,欠缺的部分能力期望通过采用协同作战能力(CEC)后弥补。
4.3 综合水下作战系统(IUSW)
DDG-1000的水下作战系统在最初立项时被称为IUSW-21计划,2002年9月后开展了海上试验,试验设备安装在现役驱逐舰上,与舰上原装的AN/SQS-53C舰壳声纳集成在一起,一同试验的还包括LBVDS轻型宽带变深声纳、多功能拖曳阵(MFTA)、AN/SPS-55水面搜索雷达以及先进的宽带处理器等。IUSW-21计划总体布置情况如图10所示。
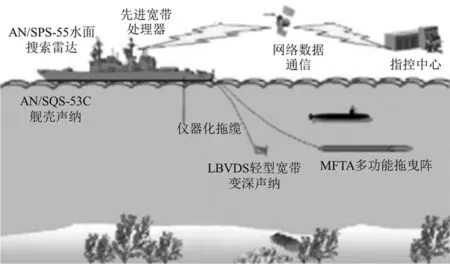
图10 IUSW-21海试配置示意图
1) 系统组成

图11 DDG-1000舰壳声纳及拖曳声纳布置
正式安装于DDG-1000的综合水下作战系统(Integrated Undersea Warfare,IUSW)型号为AN/SQQ-90,它涵盖了双频主被动舰壳声纳(AN/SQS-60舰壳中频声纳和AN/SQS-61舰壳高频声纳)、AN/SQR-20多功能拖曳阵列声纳系统、轻型宽频可变深度声纳(LBVDS)、直升机载吊放声纳、投送式探温仪、拖曳鱼雷对抗系统、水下声学对抗系统(可对敌方鱼雷声纳进行杂音干扰或制造假目标)和相关的数据传感装置以及软硬件等。整套AN/SQQ-90的电子设备同样被整合在一个电子模块化封装箱(EME)之中,在交付造船厂之前就能完成整合与测试工作,节省了安装与测试时间,减少整套设备的体积与重量,还可获得最佳的电力供应和冷却效率[12]。
综合水下作战系统包括的主要声纳如下:
(1) 双频段舰壳声纳
双频段舰壳声纳包括SQS-60中频声纳和SQS-61高频声纳两种声纳,分别安装在舰艏球鼻内的上下两个圆柱体中,图11显示了DDG-1000的双频段舰壳声纳(同时显示了拖曳阵列声纳和鱼雷对抗系统)的布置位置。上为高频SQS-61声纳,下面为SQS-60声纳。SQS-61具备极高的精度,能够支持在行进中规避水雷攻击,SQS-60主要用于侦测潜艇。
(2) 多功能拖曳阵列声纳(AN/SQR-20)
AN/SQR-20(Multi-Function Towed Array,MFTA)采用了稀疏阵技术和模块化结构,由多个不同频段模块组成。AN/SQR-20具有远距离被动探测、噪声测向、跟踪和识别功能,可以支持反潜战、鱼雷防御报警接收、水面舰艇远距离探测等任务。其海上应用场景主要是执行大范围远距离初始探测,并引导舰载反潜直升机迅速飞往目标区域,再使用机载探潜设备对潜艇实施精确定位。相对于上一代AN/SQR-19系统,AN/SQR-20具有更大的覆盖范围,更高的探测性能和可靠性,采用了模块化设计,从而降低了维修和更换难度。
(3) 轻型宽带变深声纳(LBVDS)
轻型宽带变深声纳(LBVDS)专为侦测低速航行的静音潜舰而设计,采用了新型高能量密度材料制作发射换能器,信号产生和处理频率可覆盖1~6kHz,探测距离达12~15海里。LBVDS采用宽带波形和相应的处理算法,可抑制混响和浅水有源声学返回信道衰落的影响,对浅海中的安静型慢速潜艇和鱼雷的侦测和识别效率较以往可以改善20~30%。LBVDS采用了仪器化拖缆技术,即在拖缆上布置温度传感器,能够实时测量不同深度的海水温度,为自适应处理工作创造了基础,从而进一步提高自动化水平。另外,LBVDS还具有快速定位、高可靠、低虚警率等优点。
2) 系统特点
(1)多功能集成
AN/SQQ-90结合了最新型的军用声纳和商用信息技术,将反潜战指挥、舰上和舰外声探测、火力控制、武器发射、直升机反潜、遥控猎雷和鱼雷防护等多功能集成于一体,是能执行浅海和深海两种水下作战任务的综合系统,可以应对近海和开放海域的多种目标,尤其是水雷和静音型潜艇[12]。
(2)自动化设计
AN/SQQ-90采用自动化技术和独特的信息管理技术,使整个系统达到高度的自动化水平。例如,其采用的智能辅助工具通过自动提示和战术响应来提示操作人员如何注意和分析水下作战状况。相比于传统声纳系统中在噪声干扰下寻找目标的过程耗费声纳操作员大量精力的现状,AN/SQQ-90系统可以自动对目标进行分类识别,提供各种目标的优先等级,操作员在此基础上根据战术和环境状况做决策。由于自动化水平的提高,AN/SQQ-90所需的操作人员数量只有宙斯盾舰使用的AN/SQQ-89的1/3。
(3)协同工作
美国海军网络中心反潜战概念最主要的要求之一是尽早发现敌方潜艇,在编队中形成共享的统一态势图像,并由处于最合适位置的作战平台实施对潜攻击。AN/SQQ-90系统采用未来作为美国海军通用标准的开放式系统架构,与DDG-1000舰上同样采用开放式结构的作战系统和多传感器系统相互结合,可以实现反潜作战指挥、武器控制以及与反潜直升机的协同作战,具备自动水下目标探测、识别、跟踪、定位和攻击的能力。例如,在一种协同反潜工作模式中,LBVDS与AN/SQR-20可以协同工作。通过固定于舰体的LBVDS发射主动声波信号,并由拖曳的AN/SQR-20负责接收回波进行处理,能够实现对一些停机潜艇进行主动探测,从而弥补被动探测效率不高的缺陷,同时能够缩短作战反应时间。据称,这种组合效能超过现有SQR-19的10倍。
4.4 全舰隐身设计
DDG-1000全舰隐身设计主要体现在针对雷达隐身的集成复合材料舰岛与孔径设计、针对红外隐身的红外线模型设计和针对声学隐身的穿浪型内倾船舷舰体设计三个方面。
1) 雷达隐身
为实现雷达隐身,在上层建筑方面,DDG-1000采用了集成复合上层建筑和孔径结构(ICDHA)的一体化成型结构,整体造型由下往上向内收缩,并且将雷达、通信等天线集成于该一体化上层建筑中,实现了舰上几乎所有射频天线(约70个)的集成安装,最大程度减少了甲板上的暴露物。并且,该上层建筑结构采用重量轻、强度高、雷达反射性低且不会锈蚀的复合材料制造。上述措施使得DDG-1000获得了极低的雷达反射截面积(RCS)。另外,在整个船体方面,由于采用穿浪型内倾单体船型,舰炮也采用隐身设计,全舰隐身性能得到显著增强。通过这一系列隐身设计,但其雷达截面积仅有一艘数百吨的渔船大小,在海上作业时被发现的机率低于10%。
2) 红外隐身
在针对红外辐射特征控制方面,DDG-1000对能产生红外辐射的废气进行了特殊的处理。首先将由动力系统排出的废气先经过海水和空气冷却,然后由集成上层建筑主机烟囱顶部排烟口排出。排烟口被设计为只能从舰体顶部才能观测到,因此可大大减小被外界通过红外手段观测到的几率。同时,还采用吸取海水并以喷雾的方式冲刷冷却船身的热点,以减少热讯号,进一步降低全舰红外辐射特征。
3) 声学隐身
在噪声控制方面,DDG-1000将其动力系统安装于减震浮筏上,可减小发动机振动噪声,从而降低被潜艇声纳发现的机率。另外,DDG-1000的船体外形被设计为低阻力的穿浪体型,并且采取多种先进的减振降噪措施,能将水面航行时的噪音降至110分贝左右。该噪声级别可媲美洛杉矶级攻击核潜艇。DDG-1000目前是全世界最安静的水面舰艇,颠覆了潜艇总是能在远距离先侦测到水面舰的局面。
5 DDG-1000与我海军舰艇对比分析
通过上述对DDG-1000关键信息技术分析,并对比我国海军发展现状,我国海军舰艇在信息基础设施、系统集成、架构设计和隐身设计方面与美军还存在不同程度的差距,建议在这些方面取长补短,进一步提升我海军舰艇的战斗力。
1) 信息基础设施
DDG-1000的处理机柜和显控台根据作战系统、机械、电气、通信等专用的不同进行了分类标准和通用化,可以使得海军使用标准软件和商用货架(COTS)硬件时获得持续增强的能力。DDG-1000采用了标准的模块化电子封装箱(EME),为数据处理设备提供了安全的工作环境,通过可灵活布置的适配设备连接各个分系统,支持常用的工业现场总线接口,人机接口采用标准的显控台。DDG-1000网络基础设施采用了“核心+接入”两层光纤以太网,实现全舰战术和非战术网络的一体化。
我海军舰艇在显控台方面虽然实现了标准化,但人机工程方面还需进一步优化。各数据处理设备分散独立,保护方面尚无电子封装箱式的安全措施。网络方面已经初步实现了作战、舰船控制和通信网络的融合,但尚未实现一体化,且基于安全和管理上的因素,战术和非战术网络没有融合。建议我海军舰艇研制单位借鉴DDG-1000的基础设施措施,取长补短,为舰载信息系统和设备建立良好的公共基础设施环境。
2) 信息系统集成
美国是军事信息系统集成的最先倡导者,其军事信息系统经历了C2—C3—C3I—C4I—C4ISR(C4ISR分别指指挥、控制、通信、计算、情报、监视、侦察)的发展历程,其最明显的发展特点是将各个功能逐一进行综合集成[13]。DDG-1000采用的全舰计算环境(TSCE)打破了以往的“烟囱式”系统结构,以同一计算资源横向集成了通信、雷达、侦察、对抗、导航、武器、平台控制、训练等多个任务系统的终端应用,以统一的管理和中间件纵向集成了从底层物理硬件及其各种操作系统、接口、协议等,构建一个能够供外部各种终端应用软件运行、操控和显示的软环境。并且,以TSCE为基础,其外部显控台和人机界面接口也进行了集成优化,任何一个显控台都与其它显控台互为备份,减少了战位和人员。这些集成措施是突破性的,极大地节省了舰上软硬件资源和人力资源,使得DDG-1000上的人员较DDG-51减少了50%。
我海军舰艇在集成优化上面开展了不少探索,但仍未打破传统的体系架构。在计算资源和网络资源共享方面,在全舰基础设施、接口标准化、操作自动化方面,与DDG-1000相比存在较大的差距,无法像其突破性的提高软硬件资源和人力资源的效率。建议我海军舰艇总体单位联合信息系统承制单位加强标准规范的应用,提高信息装备的兼容性,为下一步信息系统集成奠定基础。
3) 开放式架构
DDG-1000在TSCE系统结构上采用了开放式的体系架构,层与层、模块与模块之间通过标准的接口和协议进行交互或互联。这种设计的好处是,当技术更新使得某层或某个模块升级后,直接改动的只有该层或该模块,其它层或模块可不做改变。DDG-1000的体系架构很多借鉴了商业标准和趋势,获得了升级效率和灵活性,为海军较少了生命周期成本,并使其具备快速部署能力,系统重构能力和多变的任务适应性。
我海军在开放式架构方面开展过一些推进工作,舰上应用业务和底层网络尝试按照标准的计算机网络分层设计,但是由于一些旧有“烟囱”系统的采用和用户使用习惯难以改变等原因,导致开放式架构进展缓慢。建议海军从顶层全局考虑,推广适合开放式架构的应用模式,以发挥开放式架构的巨大优势。
4) 舰面隐身设计
DDG-1000在舰面天线集成和共形方面几乎做到了极致,通过射频集成技术、孔径共用技术尽可能减少天线数量,并采用一体化上层建筑共形安装或采用选频罩封装了几乎所有的天线。例如,单部多功能雷达(MFR)就涵盖了多部传统雷达以及导航功能。并且,可以推测,DDG-1000的卫通天线也实现了阵面化。
我海军最新舰艇也逐步尝试了舰面共形设计,实现了超短波、塔康敌我识别等天线的共形安装,但短波和卫通两方面在天线设计上仍然存在难点,短波天线依旧为鞭天线,卫通天线依旧为抛物面天线,建议在短波天线共形设计和卫通天线阵面化方面开展重点研究。
6 结语
美海军DDG-1000在舰载信息系统集成上提出了全舰计算环境、多功能雷达、综合水下作战系统和隐身设计等多种信息技术概念,应用了集成优化、开放式体系架构、共形设计等设计原则,使得全舰在信息化水平上获得质的飞跃。本文针对上述关键技术进行详细分析,并指出了我海军舰艇在这些方面的差距,建议我海军以这些技术为借鉴,结合我军实际应用需求,推进我国海军舰艇的信息化水平。
[1] Joseph J. Oravec, DDG-1000 Missile Integration: A Case Study[D]. Monterey: Thesis of Naval Postgraduate School, Monterey, California, March, 2014.
[2] Ronald O'Rourke. Navy DDG-51 and DDG-1000 Destroyer Programs: Background and Issues for Congress[R]. Congressional Research Service Report, May 20, 2016.
[3] Mark Henry, Michael Iacovelli, Jeffrey Thatcher. DDG 1000 Engineering Control System (ECS)[J]. 2006.
[4] 黄勇. 国外新型驱逐舰作战系统分析[J]. 舰船电子工程, 2010,30(12):4-8.
[5] 李明. 美海军开放式体系架构计算环境发展综述及启示[J]. 计算机与数字工程, 2012,40(12):56-59.
[6] 董晓明,石朝明,黄坤,等. 美海军DDG-1000全舰计算环境体系结构探析[J]. 中国舰船研究,2012,7(6):7-14.
[7] 董晓明,冯浩,石朝明,等. 全舰计算环境体系结构和系统集成框架[J]. 中国舰船研究,2014,9(1):7-13.
[8] 裴晓黎. 美海军TSCE设计剖析及对我军信息系统集成模式的启示[J]. 计算机与数字工程,2015,43(9):1607-1614.
[9] 陈霞,宋敏,韦正现. 舰船电子与信息系统综合集成研究进展[J]. 舰船电子工程,2014,34(7):4-10.
[10] 徐勇. 美军舰载电子模块化封装箱EME研制过程[J]. 舰船电子工程, 2014,34(6):155-159.
[11] 李庶中, 杨华明. 舰载电子设备一体化的发展与关键技术[J]. 雷达与对抗, 2010,30(1):7-14.
[12] 石万山. 舰艇声纳技术的发展动向与分析[J]. 舰船电子工程,2013,33(12):138-141.
[13] 李旭,程雄,欧中红. 军事信息系统综合集成技术研究[J]. 计算机与数字工程, 2015,43(7):1266-1282.
Key Information Technologies of US Navy Ship DDG-1000 Mission System
JIANG Yan1YANG Xinwu2WU Ming2LIN Jian2
This article briefly reviews the history of the US Navy Ship DDG-1000 program and outlines its ten critical technologies. Then the mission system of the ship is introduced. Primary attention is given to four key information technologies, including total ship computing environment, multi-function radar, integrated under sea warfare and the stealth design. Based on the above, it compares and analyzes the differences between DDG-1000 and our navy ships from the perspectives of DDG-1000’s new technology features.
DDG-1000, mission system, total ship computing environment, multi-function radar, under sea warfare, stealth design.
2016年6月10日,
2016年7月30日
姜艳,女,高级工程师,研究方向:通信与通信对抗技术。杨心武,男,博士,工程师,研究方向:舰船通信系统设计和开发。吴明,男,博士,高级工程师,研究方向:舰船通信系统。林健,男,硕士,工程师,研究方向:舰船通信系统设计和开发。
TP393.09
10.3969/j.issn.1672-9730.2016.12.004
猜你喜欢
绿色天府(2022年6期)2022-07-14
火力与指挥控制(2021年8期)2021-09-08
军事文摘(2020年22期)2021-01-04
考试与评价·八年级版(2020年5期)2020-10-29
音乐天地(音乐创作版)(2020年7期)2020-09-11
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
舰船电子工程(2017年10期)2017-11-28
百科探秘·航空航天(2015年4期)2015-11-07
