
秸秆粉碎与残膜集条联合作业机的研制与试验
2017-01-09 05:31于云海陈学庚温浩军
农业工程学报 2016年24期
于云海,陈学庚,,温浩军
秸秆粉碎与残膜集条联合作业机的研制与试验
于云海1,陈学庚1,2※,温浩军2
(1. 石河子大学机械电气工程学院,石河子 832003; 2. 新疆农垦科学院机械装备研究所,石河子 832000)
地膜残留已经成为影响新疆棉区可持续发展的一个主要因素,而现有的残膜回收机具大多存在适应性差、工作效率低、回收的地膜含杂率高、结构复杂等问题。针对上述实际情况,该文提出了先将地膜集条再捡拾回收的分步作业思路,设计了一种用于秋后的秸秆粉碎与地膜集条联合作业机,主要由悬挂装置、动力传递系统、秸秆粉碎装置、秸秆输送装置、地膜集条装置、脱模装置等部件组成。该机采用抛送式秸秆粉碎装置,将粉碎的秸秆后抛至集条后的地面上,有利于残膜回收秸秆分离;采用仿形式地膜集条装置,适应性好,集条率高。样机试验结果表明,机具作业速度为5~7 km/h、刀轴转速为1 880 r/min、集条装置的转速在150~160 r/min时,平均工作效率可达到1.15 hm2/h,平均地膜集条率可达到92.6%;平均膜秆分离率可达90.5%;平均粉碎秸秆长度合格率可达97.5%,各主要参数均满足农艺和国家标准要求。该研究可为中国主要棉区的残膜污染治理提供参考。
农业机械;设计;试验;秸秆粉碎;地膜;集条
0 引 言
新疆作为世界上重要的棉花种植区,2015新疆维吾尔自治区棉花种植面积227.31万hm2[1],棉田铺膜率已达100%,每年新地膜使用量就在10万t以上,而覆盖20 a的土壤中每平方米残留有地膜30 g以上[2](相当于7层新地膜的质量)。在自然条件下,地膜可在土壤中可以残留200~400 a[3],如果不能及时有效处理,地膜长时间在农田残留,势必影响农作物产量和中国农业的可持续发展[4-7]。处理残膜的方法有填埋、焚烧、人工回收和机械回收等,但是由于填埋、焚烧和人工回收的方法存在浪费土地、污染环境、劳动强度大等弊端,所以,现在国内外普遍采用机械化回收的方式来处理残留地膜[8-11]。
目前,中国研制了多种形式机械化残膜回收机具,按照棉花的生长周期可分为播前、苗期和收获后收膜3类[12-13]。由于在作物收获后,当年的地膜在地表残留比较完整、强度较高,易于回收,且可以结合秸秆粉碎联合作业,因此,秋后残膜回收与秸秆粉碎联合作业机械将成为今后研究的主要方向[14-18]。用于新疆棉区的秋后联合作业机械已经有多种机型。石河子大学研制的SMS-1500型秸秆粉碎与残膜回收机,该机在收膜时易将秸秆残枝收起,回收后的残膜含杂率较高[19];新疆农垦科学院农机化所研制的4SJ-1.6型残膜回收与秸秆粉碎还田机,该机通过茎秆输送绞龙和残膜捡拾滚筒来分离膜秆和回收残膜,整机结构复杂,膜秆分离率低,容易拥堵[20];新疆农科院农机化所研制的4JSM-1800型抛送式棉秆粉碎还田及残膜回收联合作业机,该机通过起膜、挑膜、收膜的方式进行残膜回收,由于棉田地形复杂,机具没有仿形功能,导致起膜的效果通常难以保证[21-22]。
针对上述问题,本文提出了一种先将残膜集条再捡拾回收的残膜回收方法,研究设计了一种用于秋后的秸秆粉碎与地膜集条联合作业机。该机一次作业可实现秸秆粉碎、地膜集条和膜秆分离。地膜集条后再配合残膜捡拾打包机作业,完成地膜打包回收[23-25]。
1 整机结构及工作原理
1.1 整机结构
秸秆粉碎与残膜集条联合作业机由悬挂装置、动力传递系统、秸秆粉碎装置、秸秆输送装置、地膜集条装置、脱模装置、机架和地轮等主要部件组成。其结构如图1所示。
其中秸秆粉碎还田装置由刀轴、刀座、动刀、定刀等组成;秸秆输送装置主要由风道、物料导流槽等组成;集条装置主要由弹齿、弹齿固定架、链条、链轮轴、仿形调节拉杆、脱模装置等组成,两侧集条装置末端安装有脱模装置。
a. 主视图
a. Front view
b. 俯视图
b. Plan view
1.悬挂装置 2.传动系统 3.风道 4.液压系统 5.机架 6.物料导流槽 7.仿形拉杆 8.弹齿 9.传动链 10.护罩 11.弹齿固定架 12.链轮轴 13.脱模装置 14.地轮 15.起膜铲 16.刀轴 17.L型动刀 18.压膜装置 19.定刀 20.扶禾器
1.Suspension device 2.Transmission system 3.Air passage 4.Hydraulic system 5.Frame 6.Materials guide channel 7.Profiling device 8.Spring-tooth 9.Transmission chain 10.Protecting cover 11.Supporting structure 12.Sprocket shaft 13.De-film device 14.Ground wheel 15.Film shovel 16.Cutter shaft 17.L-type moving blade 18.Pressed film device 19.Fixed cutter 20.Crop lifter
图1 秸秆粉碎与残膜集条联合作业机结构示意图
Fig.1 Sketch diagram of straw chopping and plastic film strip-collection combined machine
1.2 工作原理
如图1所示,整机通过悬挂装置与拖拉机后三点悬挂装置连接,机具的传动系统2通过传动轴与拖拉机动力输出轴连接,带动秸秆粉碎装置工作;液压系统4通过液压油管与拖拉机的液压输出端连接,带动两侧地膜集条装置工作。机具作业时,顺着膜行方向前进,棉秸秆在扶禾器20的作用下,进入到粉碎室,粉碎室的刀轴16在获得传动系统2的动力后作高速旋转,通过固定在刀轴上的动刀17和固定在机架上的定刀19的共同作用,将进入到粉碎室的一个工作幅宽的秸秆粉碎,粉碎的秸秆被向后抛送进入风道3,再经物料导流槽6抛出,秸秆出料口设计成“八”字型,使粉碎后的秸秆被抛撒在机具两侧。在秸秆粉碎过程中,压膜装置18始终压在残膜上,防止地膜在秸秆粉碎装置产生的强风作用下,被吸进粉碎室与秸秆一起被粉碎。同时,液压系统通过链条带动链轮轴12转动,弹齿8通过弹齿固定架11,固定在链条9上,链轮轴通过传动链9带动弹齿8转动,将残膜向中间收集。当弹齿8转动到将要脱离地面时,弹齿沿着导槽进入到脱模装置13中,将缠绕在弹齿上的残膜脱掉。两侧集条装置通过仿形拉杆7随地仿形。残膜集条作业完成后,再用相关的残膜捡拾打包机统一打包回收。
1.3 主要技术指标
根据国家标准和农艺要求,并结合新疆地区棉花种植的实际情况,秸秆粉碎与残膜集条联合作业机主要技术指标如下表1所示。
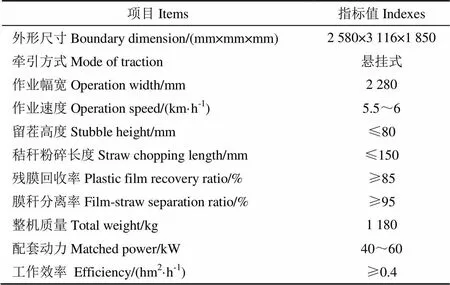
表1 主要技术指标
2 主要部件的结构设计
2.1 秸秆粉碎还田装置
本机采用横轴锤片式秸秆粉碎装置,结构如图2所示,主要由刀轴、L型动刀、定刀、前、后挡板等组成。
2.1.1 动刀在刀轴上的排列方式
动刀在刀轴上的排列方式对秸秆粉碎还田装置的作业效果有着重要的影响,其排列一般应满足以下要求[23]:1)满足工作性能的要求。在满足切割质量且不漏割的前提下,应尽量加大刀片间的轴向和径向间距,以免发生干涉和秸秆堵塞;2)满足动平衡要求。动刀应在刀轴上均匀分布,每组动刀在径向要等角度分布,夹角一般要大于60°,以使机具空载旋转时刀轴受力均匀,达到动平衡计算要求。
动刀和刀轴构成一个多刚体转子,理论上其转动惯量不是常量,但是合理的排列动刀可使刀轴高速旋转时很快恢复到平衡位置。当前常用的排列方式主要有3种:螺旋线排列、对称排列和交错平衡排列。由于交错平衡排列的动刀结构简单,安装方便,在运动中相对的两组动刀离心力的合力在同一平面内,使得整机具有良好的平衡性,同时能保证碎秸秆有足够的抛送高度和距离,因此本机采用交错平衡排列方式,如图3所示。
2.1.2 刀轴转速的确定
秸秆粉碎还田机属于横轴卧式旋转机械,粉碎秸秆的方式是无支撑逆向切割,对动刀切割端的线速度要求较高。研究结果表明,对具有一定刚度的秸秆进行无支撑切割的最小速度min=48 m/s[26-28]。
动刀是秸秆粉碎装置的主要工作部件,作业时在刀轴的带动下高速旋转,为了提高机具的粉碎效果,要求动刀在工作时,刀尖的绝对运动轨迹是一条余摆线[27],且摆线的横弦越大对粉碎越有利[29],如图4所示。
设动刀刀端运动轨迹上任一点坐标为(,),由图4可得点运动方程为

由式(1)微分得
(2)
由速度合成原理得动刀切割端绝对速度

式中0为动刀切割端回转半径,m;0为机具牵引速度,m/s;0为刀轴旋转角速度,rad/s;V为刀端上点在轴方向的分速度,m/s;V为刀端上点在轴上的分速度,m/s;为动刀切割端绝对速度,m/s。
通常情况下,秸秆粉碎装置的动刀对棉秆的切割点是在动刀运动轨迹的最下端,此时动刀切割方向与机具前进方向相同。
即:

刀轴最小转速0可以根据下式确定
(4)
根据农户对棉田秸秆粉碎效率的要求,机具的牵引速度应达到1.4~1.9 m/s。给定0=0.282 m,当0=1.4 m/s时,由式(4)可得,刀轴转速0≥1 562 r/min。
2.2 压膜装置
L型动刀工作时在粉碎室内产生很强的风场,处于粉碎室下面的地膜很容易在风力的作用下被吸附、粉碎并随秸秆一起排出,这将大大影响膜秆分离率和残膜集条回收的效率[30]。压膜装置是降低动刀对残膜吸附作用的重要工作部件,其结构如图5所示。
1. 连接架 2.压膜板
1.Connect frame 2.Pressed film plate
注:连接架可以通过铰接点O转动,压膜板可以绕O点转动,通过转动使压膜装置具有一定的活动空间。
Note: Connect frame can rotate around the pointOand the plate can rotate around the pointO. Through the rotation, it will make some motion space for squeeze-film device.
图5 压膜装置
Fig.5 Pressed film device
该装置通过连接架1铰接在机架上。在前进过程中遇到较大土块等障碍物时,连接架和压膜板可分别绕铰接点O和O旋转,越过障碍。为避免压膜装置2在膜行上滑行时刮破地膜,压膜板2采用橡胶材质。机架上安装有限位挡板,防止压膜装置在运动过程中与秸秆粉碎装置发生干涉。
2.3 地膜集条装置
2.3.1 仿形角和弹齿作业高度
地膜集条装置主要由多排弹齿、传动链、张紧装置、液压系统、脱模装置等组成,左右两侧错开布置在秸秆输送装置的下方,由液压系统统一分配动力。在整个集条装置的传动链、张紧装置、机架等四周包裹有护罩,以避免地膜飞起时产生缠绕现象。其结构如图6所示。
集条装置是机具的主要工作部件,弹齿的间距、倾角、转速、入土深度等因素直接影响集条效率。传动链上的每排弹齿,其在棉田表面方向上划行运动的距离可由下式得出

式中为弹齿在从动链轮上的回转半径,m;为弹齿入土倾角,(°);为弹齿在主动轮正下方距离地面高度,m;为弹齿作业倾角,(°);为一侧主动链轮和从动链轮轴心连线与地面夹角,(°);为弹齿在从动轮正下方入土深度,m,和的值可通过式(6)求得。
(6)
由式(5)可得,当弹齿回转半径、链轮中心距等设计参数一定时,弹齿刮行距离随着高度的增大而增长,随着集条装置仿形角的减小而增长。通过试验得弹齿刮行的距离越长、入土深度越深,弹齿对地面残膜的收集作用越大,地膜集条的效果越好。同时弹齿对地面上棉秆等杂物的收集量和弹齿转动的阻力也会随之增加,而且也会影响到脱膜装置的脱净率。经过多次试验,取弹齿在主动轮正下方距离地面高=0.04 m,集条装置仿形角=4°。
a. 主视图
a. Front view
b. 俯视图
b. Plan view
1.机架 2.弹齿 3.仿形拉杆 4.张紧装置 5.液压系统 6.脱模装置 7.传动链 8.护罩
1.Frame 2.Spring-tooth 3.Profiling device 4.Chain tension device 5.Hydraulic system 6.De-film device 7.Transmission chain 8.Hood
注:为集条装置从动链轮轴旋转角速度,rad·s-1;为弹齿安装倾角,(°);为集条装置仿形角,(°);为弹齿作业倾角,(°);为弹齿入土角,(°);为弹齿回转半径,mm;为弹齿在地面上的刮行距离,mm;为弹齿在从动轮正下方入土深度,mm;为弹齿在主动轮正下方距离地面高度,mm;为工作幅宽,mm;0为每排弹齿的安装间距,mm;v为集条装置在与0垂直方向的水平分速度,m·s-1;为弹齿间距,mm。
Note:represents angular velocity of driven shaft of collection strip device, rad·s-1;represents setting dip angle, (°);represents profiling angle, (°);represents working dip angle, (°);represents penetrating angle, (°);represents gyration radius of spring-toothmm;represents the scratching distance of the tooth on the ground, mm;represents penetration depth of tooth underneath of driven shaft, mm;represents height from ground underneath of driving shaft, mm;represents working width, mm;0represents installation distance of each row of tooth, mm;vrepresents the horizontal velocity perpendicular to the0, m·s-1;represents distance of tooth in each pair, mm.
图6 集条装置
Fig.6 Collection strip device
2.3.2 弹齿转速
集条装置在转动的同时,也在拖拉机的牵引下作用向前运动,向前运动的速度0为机具的牵引速度。每排弹齿在前进方向上的运动如图7所示。
弹齿收集地膜的作业效果与弹齿排列的密度密切相关,密度越大集膜率越高,但是收集的地膜的含杂率也会显著提高,为后续膜秆分离带来了不便;密度太小容易造成遗漏,影响残膜回收率。综合考虑以上情况,根据田间试验,单个弹齿间距设计为=80 mm,每弹齿在传动链上的安装间距设计为

为了保证集条的连续性和集条率,设相邻每排弹齿运动的时间间隔为0,传动链的平均运动速度为,则应满足下列关系
(8)
式中为所选链条的节距,mm;0为每排弹齿在传动链上的安装间距,mm;为单个弹齿设计间距,mm。
传动链的平均速度为

式中为链轮齿数;为集条装置从动链轮轴旋转角速度,rad/s。
转速为

由式(8)、式(9)、式(10)可得
(11)
取机具牵引速度0=5 km/h,可得集条装置转速的取值范围为130~173 r/min。集膜弹齿的实际运动应为机具牵引速度0和传动链的平均速度的合运动,速度夹角为,可得

为使残膜保持良好的收集状态,避免弹齿在前进方向上缠膜的现象,角度应小于45°,结合式(9)和式(10)得在牵引速度0=5 km/h、集条装置仿形角=4°时,的取值在35.7°~43.5°之间。
2.4 传动系统
秸秆粉碎与地膜集条机的传动系统由机械和液压2种传动系统组成。机械传动雷沃欧豹754-A轮式拖拉机系统有两路,一路主要由变速箱和带传动机构组成,动力从拖拉机后输出轴经传动轴输出,再经变速箱增速后传递给皮带传动机构;另一路主要由变速箱和链传动机构组成,动力由液压马达输出,经变速箱减速后传递给链传动机构;液压传动系统主要由液压马达、流量阀和辅助原件组成,动力从拖拉机的液压输出端经液压油管传递给液压马达。如图8所示。
3 试验与分析
3.1 试验条件
田间试验是在2015年10月10-15日,昌吉回族自治州玛纳斯县六户地镇秋天收获后的棉田进行。试验地面积为400 m×50 m,地面平整度较好(有较浅的车辙),属栗钙土;滴灌带已经被回收,土壤平均含水率12.6%(0~10 cm内);棉花种植模式为:行距660 mm,株距100 mm,膜边压入土中75 mm;棉秆有少量倒伏,秸秆平均含水率15.24%,平均直径为11.31 mm,秸秆高度在50~80 cm之间;膜宽为2 050 mm,厚度为0.008 mm,膜中间有少量土块和秸秆,抽出滴灌带时地膜被从行间撕开;拖拉机选用福田雷沃754,拖拉机牵引速度为5~7 km/h,输出轴转速为760 r/min,集条装置转速为130~170 r/min。
3.2 试验方法
按照国家标准GB/T24675.6-2009《保护性耕作机械秸秆粉碎还田机》和GB/T 25412-2010《残地膜回收机》对秸秆粉碎与地膜集条机的相关性能进行的试验,试验的内容主要包括:留茬高度和秸秆粉碎长度合格率、膜秆分离率、当年地膜集条率等,同时检测机具的秸秆粉碎、输送能力和脱模装置的脱模能力以及机具的整体工作性能。试验器材包括:便携式土壤水分测定仪(华控兴业HSTL-TRCS02型,精度±3%)、激光转速表(胜利仪器VICTOR6234P型)、秒表、卷尺、天平(深圳市无限量衡量器有限公司)、铁锹等。
3.2.1 留茬高度合格率
每个行程在测区长度上选择一个测量点,测量范围为;一个工作幅宽×1 m,根茬高度≤8 cm视为合格,分别在5个工作行程上随机测量5个点,记录下每个点的测量结果,最后取5个测量点的平均值。
3.2.2 秸秆粉碎长度合格率
选取2个工作行程,在膜行长度方向上,每个行程等间距测定3个点,每点测量面积为:一个工作幅宽×1 m,粉碎后秸秆的长度≤20 cm视为合格。捡拾测量范围内的所有秸秆称质量,再从中挑出粉碎长度大于20 mm的秸秆称质量。按照式(13)~式(14)计算每点粉碎秸秆合格率和工况平均值。
(14)
式中M为测区秸秆总质量,kg;M为测区秸秆不合格的质量,kg;F为测区秸秆合格率,%;为工况平均合格率,%。
3.2.3 膜秆分离率
采用五点法,每个行程在测区长度方向上中间位置选取一个点,在5个行程上进行测量,每点测量面积为:一个幅宽×1 m,作为工作前的测点;然后再在靠近工作前的测量区域处,挑选5个点作为作业后的测点。按照式(15)~式(16)计算每点膜秆分离率和工况平均值。

(16)
式中w为工作前测量区域内留茬高度(120 mm)以上秸秆总质量,kg;w为工作后测区掺杂在集条后的地膜中的秸秆的质量,kg;F为测区膜秆分离率,%;为工况平均值,%。
3.2.4 地膜集条率
地膜集条率直接反应出了秸秆粉碎还田与地膜集条机的工作性能,测定方法同3.2.3。集条率可由式(17)~式(18)求得。

(18)
式中J为测区地膜集条率,%;W为测区被集条后的当年地膜质量,kg;W为测区工作前的当年地膜总之量,kg;为工况平均值,%。
3.3 试验结果与分析
田间试验结束后,测得秸秆粉碎与残膜集条联合作业机的主要性能指标如表2所示。
在选取的棉区进行了多次试验,试验结果表明:机具运转灵活、平稳、安全可靠,当集条装置的转速为150~160 r/min时,整机性能良好,可进行长时间作业;样机的平均工作效率可达到1.15 hm2/h,大于0.5 hm2/h的设计要求;平均地膜集条率可达到92.6%;平均膜秆分离率可达90.5%;平均粉碎秸秆长度合格率可达97.5%,大于92%的设计要求;平均留茬高度为78.3 mm,小于80 mm的设计要求。

表2 主要性能指标测试结果
影响地膜集条率的因素主要有2点:首先农户进行滴灌带回收作业时,将当年的地膜撕裂,撕裂的地膜有少量缠绕在棉花秸秆上,使得这部分地膜与秸秆一起粉碎,从而对地膜集条率产生了一定的影响;其次,弹齿在集条时,会有部分地膜缠绕在根茬上,也会影响集条率。影响膜秆分离率的主要原因是粉碎的秸秆在自然风的作用下会散落在地膜集条区域,与集条后的地膜掺杂在一起。
4 结 论
1)本文研制并试验了秸秆粉碎与残膜集条联合作业机,与目前研制的茎秆粉碎还田与地膜回收机具相比,首先,提出了先集条再回收的分步地膜回收模式,将复杂的地膜回收分化为“集条—捡拾—回收”,降低了地膜回收的难度。其次,地膜集条与秸秆粉碎联合作业,作业后将集条后的地膜与粉碎的秸秆分开,在没有自然风的情况下,膜秆分离率可达90%以上,可大大减少回收后的地膜中棉秸秆等杂质的含量。最后,集条装置采用仿形机构,可以根据地面的平整度在一定范围内自动调节弹齿与地面的距离,使得集条装置更能适应棉田复杂地形。
2)整机的性能试验表明:在机具作业速度为5~7 km/h、刀轴转速为1 880 r/min、集条装置的转速在150~160 r/min时,样机运行平稳、集条效果较好,平均工作效率可达到1.15 hm2/h,平均地膜集条率可达到92.6%;平均膜秆分离率可达90.5%;平均粉碎秸秆长度合格率可达97.5%,可以满足GB/T24675.6-2009和GB/T 25412-2010对样机工作性能的要求。
3)由于受自然风和土壤平整度等不确定因素的影响,在作业的过程中有时会出现缠膜和漏集的情况;集条装置的设计是将地膜收集于膜行中间,膜行中间有根茬这可能会影响后续地膜的捡拾回收。因此,后续还需要一系列的改进和优化。
[1] 新疆维吾尔自治区2015年国民经济和社会发展统计公报[N]. 新疆日报网. 2016-04-11.
[2] 董合干,刘彤,李勇冠,等. 新疆棉田地膜残留对棉花产量及土壤理化性质的影响[J]. 农业工程学报,2013,29(8):91-99.
Dong Hegan, Liu Tong, Li Yongguan, et al. Effects of plastic film residue on cotton yield and soil physical and chemical properties in Xinjiang[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 91-99. (in Chinese with English abstract)
[3] 董合干. 地膜残留对棉花产量影响的极限研究[D]. 石河子:石河子大学,2013.
Dong Hegan. The Limit Effect of Film Residue on Cotton Yield[D]. Shihezi: Shihezi University, 2013. (in Chinese with English abstract)
[4] 王志超,李仙岳,史海滨,等. 农膜残留对土壤水动力参数及土壤结构的影响[J]. 农业机械学报,2015,46(5):101-106,140.
Wang Zhichao, Li Xianyue, Shi Haibin, et al. Effects of residual plastic film on soil hydrodynamic parameters and soil structure[J]. Transactions of the Chinese Society of Agricultural Machinery, 2015, 46(5): 101-106, 140. (in Chinese with English abstract)
[5] 牛琪,陈学庚. 地膜应用与残膜回收技术的研究现状[J].农机科技推广,2014(11):38-40.
[6] 侯书林,胡三媛,孔建铭,等. 国内残膜回收机研究的现状[J]. 农业工程学报,2002,18(3):186-190.
Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of research on plastic film residue collector in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002, 18(3): 186-190. (in Chinese with English abstract)
[7] 王鹏. 新疆兵团残膜回收机械与政策机制现状的分析研究[D].石河子:石河子大学,2013.
Wang Peng. Analytic Study of the Present Situation of Residue Plastic Film Recycling Machine and Recovery Policy Mechanism in Xinjiang Corps[D]. Shihezi: Shihezi University, 2013. (in Chinese with English abstract)
[8] 张佳,张宇涛,董黎明,等. 国内残膜回收机械研究现状及发展趋势[J]. 农业科技与装备,2014(4):29-30,33.
Zhang Jia, Zhang Yutao, Dong Liming et al. Domestic residual film recovery machine research status and development trend[J]. AgriculturalScience & Technologyand Equipment, 2014(4): 29-30, 33. (in Chinese with English abstract)
[9] 木塔力甫·艾力,张佳,张宇涛,等. 国内残膜回收机械研究现状及发展趋势[J]. 机械工程师,2014(9):64-65.
[10] 王帅. 我国残膜回收机具发展现状及趋势[J]. 农业科技与装备,2012(10):80-81.
Wang Shuai. Current development of mulching residues recovery machines China and its trend[J]. AgriculturalScience & Technology and Equipment, 2012(10): 80-81. (in Chinese with English abstract)
[11] 吕钊钦,张磊,张广玲,等. 链条导轨式地膜回收机的设计与试验[J]. 农业工程学报,2015,31(18):48-54.
Lü Zhaoqin, Zhang Lei, Zhang Guangling, et al. Design and test of chain guide rail-type plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 48-54. (in Chinese with English abstract)
[12] 胡凯,王吉奎,李斌,等. 棉秆粉碎还田与残膜回收联合作业机研制与试验[J]. 农业工程学报,2013,29(19):24-32.
Hu Kai, Wang Jikui, Li Bin, et al. Development and experiment of combined operation machine for cotton straw chopping and plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 24-32. (in Chinese with English abstract)
[13] 高团结,马俊贵,坎杂. 残膜机械化回收技术[J]. 农业工程,2014(3):10-13.
Gao Tuanjie, Ma Jungui, Kan Za. Mechanical recovery technology of residual film[J]. Agricultural Engineering, 2014(3): 10-13. (in Chinese with English abstract)
[14] 曹肆林,王序俭,沈从举,等. 残膜回收机械化技术的专利分析研究[J]. 中国农机化,2009(4):48-50.
Cao Silin, Wang Xujian, Shen Congju, et al. Patent analysis on mechanization technology of retrieving the used plastic film[J]. Chinese Agricultural Mechanization, 2009(4): 48-50. (in Chinese with English abstract)
[15] 王学农,史建新,郭俊先,等. 悬挂式棉秆粉碎还田搂膜机搂膜机构的设计与试验研究[J]. 农业工程学报,2008,24(1):135-140.
Wang Xuenong, Shi Jianxin, Guo Junxian, et al. Experimental study and design on film raking mechanism of hanging film raker withcotton-stalk crushing and returning to field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(1): 135-140. (in Chinese with English abstract)
[16] 张学军,吴成武,王旭东,等. 残膜分离筛机构的运动仿真与分析[J]. 农业工程学报,2007,23(7):113-116.
Zhang Xuejun, Wu Chengwu, Wang Xudong, et al. Motion simulation and analysis of separating sieve mechanism for scrap plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(7): 113-116. (in Chinese with English abstract)
[17] 李斌,王吉奎,胡凯,等. 残膜回收机顺向脱膜机理分析与试验[J]. 农业工程学报,2012,28(21):23-28.
Li Bin, Wang Jikui, Hu Kai, et al. Analysis and test of forward film removing mechanism for polythene film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(21): 23-28. (in Chinese with English abstract)
[18] 张学军. 残膜分离与输送装置的研究[D]. 长春:吉林大学,2007.
Zhang Xuejun. Study on Separation and Transport Device for Remnant Plastic Film[D]. Changchun: Jilin University, 2007. (in Chinese with English abstract)
[19] 王吉奎,付威,王卫兵,等. SMS-1500型秸秆粉碎与残膜回收机的设计[J]. 农业工程学报,2011,27(7):168-172.
Wang Jikui, Fu Wei, Wang Weibing, et al. Design of SMS-1500 type straw chopping and plastic film residue collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 168-172. (in Chinese with English abstract)
[20] 曹肆林,王序俭,鲁滨,等. 4SJ-1.6残膜回收与茎秆粉碎联合作业机的研制[J]. 新疆农机化,2009(1):25,31.
[21] 王学农,冯斌,陈发,等. 4JSM-1800棉秸秆还田及残膜回收联合作业机研制[J]. 新疆农机化,2003(4):53-54.
[22] 高德梅. 残膜回收机械化现状及存在的问题[J]. 新疆农机化,2012(3):17-20.
[23] 陈振歆,王金武,牛春亮,等. 弹齿式苗间除草装置关键部件设计与试验[J]. 农业机械学报,2010,41(6):81-86.
Chen Zhenxin, WangJinwu, Niu Chunliang, et al. Design and experiment of key components trash cultivators working in paddy rice seeding lines[J]. Transactions of the Chinese Society of Agricultural Machinery,2010, 41(6): 81-86. (in Chinese with English abstract)
[24] 赵岩,郑炫,周敦兴. 农田残膜捡拾打包联合作业机的研制[J]. 新疆农机化,2015(1):6-7.
[25] 陈学庚,郑炫,周敦兴,等. 残膜回收打捆联合作业机:中国专利,CN201520979363.4[P].2016-03-30.
[26] 张佳喜,王学农,陈发,等. 秸秆粉碎还田回收机刀辊工作参数的研究[J]. 农业机械学报,2007,38(6):37,82-85.
Zhang Jiaxi, Wang Xuenong, Chen Fa, et al. Study on working parameters of knife roller of field straw chopper for mulching or reclaiming[J]. Transactions of the Chinese Society of Agricultural Machinery, 2007, 38(6): 37,82-85. (in Chinese with English abstract)
[27] 中国农业机械化科学研究院. 农业机械设计手册:(上册)[M]. 北京:中国农业科学技术出版社,2007.
[28] 史建新,陈发,郭俊先,等. 抛送式棉秆粉碎还田机的设计与试验[J]. 农业工程学报,2006,22(3):68-72.
Shi Jianxin, Chen Fa, Guo Junxian, et al. Design and experimental research of the field straw chopper with throwing cotton-stalk[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(3): 68-72. (in Chinese with English abstract)
[29] 张喜瑞,甘声豹,郑侃,等. 滚割喂入式卧轴甩刀香蕉假茎粉碎还田机设计与试验[J]. 农业工程学报,2015,31(4):33-41.
Zhang Xirui, Gan Shengbao, Zheng Kan, et al. Design and experiment on cut roll feeding type horizontal shaft flail machine for banana pseudostem crushing and returning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 33-41. (in Chinese with English abstract)
[30] 李从权. 秸秆粉碎还田及残膜回收联合作业机的关键零部件研究[D]. 乌鲁木齐:新疆农业大学,2007.
Li Congquan. The Study of the Key Parts and Key Components of the Field Straw Chopper Work with Film Collecting Machine[D]. Urumqi: Xinjiang Agricultural University, 2007. (in Chinese with English abstract)
Development and experiment of straw chopping and plastic film strip-collection combined machine
Yu Yunhai1, Chen Xuegeng1,2※, Wen Haojun2
(1.,832003,; 2.832000,)
The plastic film mulch has the function of increasing soil temperature and preserving moisture, and it also can suppress weeds and maintain soil structure. Because of these special physical and chemical properties, agricultural mulching is extensively applied to cotton and other crops. Xinjiang is currently the largest cotton planting region in China, and all cotton cultivation involves film mulching. However, because plastic film itself is difficult to degrade and without scientific management and recovery in long-term use, a large amount of residual plastic film is left in the fields after harvesting, which has caused serious pollution problem to both the soil and the ecological environment. The mechanical collection of the plastic mulch is one of the effective ways to resolve plastic mulch pollution at present. Therefore, it is significant and urgent to study the residual film recovery methods and operation machines. Many kinds of mulching residues recovery machines have been developed and used, but there are some problems with the machines such as bad adaptability, low recovery rate, poor work efficiency in removing the collected film, and plastic films being easy to wind in cotton straw chopping, which needs further improvement for the machines. With a view to solving the above problems, a new method of operation step by step was proposed, which could collect plastic film in strip at first and then recover it, and a cotton straw chopping and plastic film strip-collection combined machine was designed. The machine mainly consisted of suspension device, power transmission system, straw chopping device, straw conveying device, strip-collection device, stripping device, and so on. Compared with the existing cotton straw chopping and plastic film collection combined machines, the machine proposed in this paper was simplified and efficient. The machine adopted the way of throwing cotton stalk into a certain height and distance to create a condition to separate cotton stalk from the residual film. Moreover, because of the ground profile modeling, this machine could be adapted to complex operating environments and operating requirements, and had a good performance on the strip-collection ratio. It could not only realize the straw chopper returning and the straw separation with plastic film, but also collect plastic film in strip with one operation, which ensured that it was easy to recover plastic film and recycle it. Based on the underlying theory analysis and experimental study, its basic structure and main parameters were determined, and the rational kinematic relationship among the knife-roller speed, the forward speed of unit, and the speed of strip-collection device was obtained by experiments. Field trials were conducted in Manas County of Xinjiang. The experiment results showed that the working efficiency could reach 1.15 hm2/h, plastic film collection stripe ratio was 92.6%, the straw chopping qualification rate was 97.5%, and the film-straw separation ratio was 90.5%, when the machine operating speed was 5-7 km/h, the cutter shaft speed was 1 880 r/min, and the speed of strip-collection device was 150-160 r/min, which could satisfy not only the agricultural requirements but also national standards. The research results can provide a reference to solve the problem of plastic film pollution in cotton-growing areas of China.
agricultural machinery; design; experiments; straw chopping; plastic films; collection strip
10.11975/j.issn.1002-6819.2016.24.001
S223.5
A
1002-6819(2016)-24-0001-08
2016-08-30
2016-11-21
公益性行业(农业)科研专项(201503105)
于云海,男,安徽阜阳人,研究方向为机械CAD/CAE/CAM一体化技术。石河子 石河子大学机械电气工程学院,832003。Email:995280385@qq.com
陈学庚,男,江苏泰兴人,中国工程院院士,研究员,博士生导师,主要从事农机研究和推广工作。石河子 石河子大学机械电气工程学院,832003。Email:chenxg130@sina.com
猜你喜欢
环球时报(2022-08-16)2022-08-16
林业机械与木工设备(2022年2期)2022-03-08
科教新报(2020年42期)2020-12-03
农业机械学报(2020年10期)2020-10-29
机械工程师(2020年3期)2020-03-27
学生天地·小学低年级版(2019年10期)2019-12-30
家教世界·创新阅读(2019年11期)2019-12-10
学生天地(2019年28期)2019-08-25
作文与考试·小学低年级版(2019年7期)2019-04-17
北京青年周刊(2019年37期)2019-01-19
