
基于TMS320LF240x系列DSP的末制导雷达控制系统设计
2017-01-09 10:42:38胡军辉
甘肃科技 2016年24期
胡军辉,孙 颖
(1.甘肃长风电子科技有限责任公司,甘肃兰州730070;2.中航工业兰州万里航空机电有限责任公司,甘肃兰州730070)
基于TMS320LF240x系列DSP的末制导雷达控制系统设计
胡军辉1,孙 颖2
(1.甘肃长风电子科技有限责任公司,甘肃兰州730070;2.中航工业兰州万里航空机电有限责任公司,甘肃兰州730070)
本文选用TMS320LF240x系列的TMS320LF2407A DSP芯片,采用典型数字PI调节算法,通过软件编程实现现代末制导雷达伺服控制系统位置和速度回路的闭环调节。文中详细阐述了末制导雷达数字控制系统的原理和组成,并给出了控制系统硬件接口连接图和软件结构框架图。该系统设计结构简单、功能全面,在雷达总体运行测试过程中表现出了优越的静态和动态特性。
TMS320LF2407A;DSP;末制导;伺服控制
TMS320LF2407A是美国TI公司TMS320LF240x系列下的一种定点DSP芯片,其低成本、低功耗和高性能的处理能力,使得在工程实践中大量用于电机运动的数字化控制。内部集成的先进外设让基于TMS320LF2407A的数字伺服系统在硬件连接上极大地减少控制器的外围电路,其高速的处理数据能力在满足控制系统实时性要求的同时,也使得基于现代控制理论的控制技术复杂算法得以实现。
1 硬件设计
伺服控制系统是末制导雷达的重要组成部分,伺服系统的静态精度和动态性能直接影响到雷达的测角精度和抗过载能力,它对于搜索目标、截获目标和精确测量目标位置以及其他指标起着至关重要的作用。
末制导雷达伺服控制系统的主要功能是:通过对雷达天线位置和速度信息的实时采样,同时结合接收到的雷达信号处理系统发出的控制指令、装定角度、跟踪中心角及角误差等信息共同解算完成对雷达天线位置和速度的精确控制。
雷达伺服控制系统硬件主要由伺服传动机构、伺服控制电路和伺服驱动电路组成。
伺服传动机构包括:直流力矩电机,减速器以及位置、速度传感器等。
伺服控制电路包括:天线位置信息采集模块、天线速度信息采集模块、A/D转换模块、DSP数字信号处理模块、D/A转换模块和串口通讯模块等。控制电路元件主要组成有:一片高性能DSP电路;一片CPLD时序控制电路;天线角度信息的A/D转换电路、天线速度信息A/D转换电路和SCI串口通讯电路等等。
伺服驱动电路包括:方位、俯仰模拟电流调节回路和方位、俯仰PWM功率放大电路。
系统硬件接口连接图如图1所示。

图1 系统硬件接口连接图
控制系统电路核心选用TMS320LF240x系列的TMS320LF2407A DSP芯片。DSP通过数字I/O口将A/D转换后的实时天线位置和天线速度反馈信息采集回来,经过软件内部数据处理和位置环、速度环经典数字PI调节算法解算后得出PWM数字控制量,再经由D/A转换电路输出至方位、俯仰驱动电路,最后得到方位、俯仰两支路的电机控制信号。
另外,设置SCI串行接口用于与雷达信号处理系统通讯,即DSP在进行内部实时数据运算处理的同时,时刻响应外部串口接收和发送中断。伺服控制系统接收来自雷达信号处理机的工作状态指令、装定角度、跟踪中心角及角误差信息,同时又向信号处理机上报天线当前位置、速度信息以及伺服工作状态信息等。
DSP控制芯片数据流向,如图2所示。
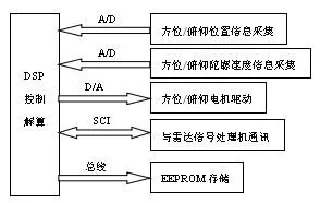
图2 控制系统数据流向图
输入:方位/俯仰位置信息、方位/俯仰陀螺速度信息;
输出:方位/俯仰电机驱动、EEPROM存储;
实时通讯:通过SCI串行通信接口与雷达信号处理机实现实时数据互通传输。
2 软件设计
2.1 软件流程
末制导雷达伺服控制系统采用数字控制伺服系统,信号采集、处理、运算通过DSP及外围器件完成,系统软件结构框架图如图3所示。

图3 伺服控制系统软件框架图
2.1.1 上电初始化
整个程序运行的开始,包括系统设置初始化、定时器中断初始化和SCI串口中断初始化等。
2.1.2 实时数据采集
采集当前天线方位、俯仰位置信息和方位、俯仰陀螺速度信息,校天线位置零偏和速度零偏值,并对采集数据做处理。
2.1.3 接收SCI串口数据
按照协议规定,判断SCI串口数据的帧头、数据长度及校验和,接收来自雷达信号处理机的SCI串口数据信息。
2.1.4 系统自检
对伺服控制系统的主要控制元件进行自检检查。包括DSP芯片检查,方位、俯仰位置反馈元件检查及方位俯仰速度反馈元件检查。
2.1.5 控制数据解算
伺服控制系统将采集到的位置、速度反馈数据结合信号处理机的控制数据一同进行解算,将解算出的结果用于伺服系统的电机控制。
根据末制导雷达技术状态要求,控制数据解算也可分解为不同子模式下系统控制量的解算输出。例如:天线待机状态数据解算、角度装定状态数据解算、搜索状态数据解算、跟踪状态数据解算和关机状态数据解算等等。
2.1.6 上报SCI串口数据
按照协议规定的数据帧头、数据长度及数据格式,向雷达信号处理机上报当前天线位置、速度信息以及当前伺服系统工作状态信息。
2.1.7 指向/搜索/跟踪模块
根据雷达信号处理机工作状态指令的不同,切换伺服系统运动形式。
指向状态——控制雷达天线指向并保持预定位置。
搜索状态——控制雷达天线在某个范围内往返运动以搜索目标。
跟踪状态——控制雷达天线指向信号处理机给定的跟踪中心角并根据实时角误差信息调整和修正天线位置。
2.1.8 输出电压解算模块
结合系统硬件特性,将控制解算后的方位、俯仰给定值进行数据处理得出不同符号的写电压信息,控制雷达天线方位、俯仰电机正/反转动。
2.2 数字算法
数字PI调节器是一种线性控制器,也是自动控制系统中最常用的一种数字控制器。将偏差的比例(P)、积分(I)通过线性组合构成控制量,对被控制对象进行控制,故称PI控制器。
伺服控制系统软件算法通过典型数字PI控制实现。系统采用位置、速度和电流三闭环回路共同完成对雷达天线位置、速度的精确控制。位置环和速度环路采用数字方法实现,电流环采用模拟方法实现。
数字PI调节器输出:

u(k)——输出函数;
uI(k-1)——上周期输出;
KP——PI调节器比例放大系数;
KI——PI调节器积分时常数;
Tsam——采样周期。
3 结论
本研究充分利用了TMS320LF2407A DSP芯片的高速运算能力和其在自动化数字控制方面的优越性以及低成本、低功耗的优点,在保证雷达伺服控制系统实时性的同时,有效的简化了系统硬件电路设计,使系统结构更加简洁、紧凑,软件流程更加清晰、明了。
[1] 胡寿松.自动控制原理(第四版)[M].北京:科学出版社,1979.
[2] 陈隆昌,陈筱艳.控制电机[M].西安:西安电子科技大学出版社,1994.
[3] 马连升.雷达伺服系统[M].北京:国防工业出版社,1983.
[4] 赵世廉.TMS320X240xDSP原理及应用开发指南[M].北京:北京航空航天大学出版社,2007.
[5] 刘和平.TMS320LF240xDSPC语言开发应用[M].北京:北京航空航天大学出版社,2003.
[6] 肖英奎,尚涛,陈殿生.伺服系统实用技术[M].北京:化学工业出版社,2004.
[7] 卢志刚,吴杰,吴潮.数字伺服控制系统与设计[M].北京:机械工业出版社,2007.
[8] 陈伯时.电力拖动自动控制系统(运动控制系统)[M].北京:机械工业出版社,2003.
TB3
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
幼儿园(2021年12期)2021-11-06 05:10:20
测控技术(2018年12期)2018-11-25 09:37:44
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
