
平衡与动作控制中的预期性姿势调节
2017-01-08 02:10:18冯祺任杰
中国运动医学杂志 2017年11期
冯祺 任杰
1上海体育学院运动科学学院(上海 200438)
2上海体育学院中国乒乓球学院
1 前言
人们在动作控制的过程中,通常会根据感觉反馈信息(sensory feedback signal)对动作是否达到目标做出判断,通过纠正误差来达到动作目的,这是一种典型的反馈控制(feedback control)。这种控制虽然可以保证动作目标的完成,但由于完成速度较慢,人们很难只依赖反馈控制来完成动作。因此,在这种方式之外,人体还存在一种开始较早的前馈调节方式(feed-forward control),这种方式可以有效弥补反馈调节速度慢的不足,帮助更好地完成动作[1]。
人类直立姿势是一种不稳定的姿势状态,较高的重心、较小的支撑面积以及多关节活动为姿势控制(postural control)带来了难度,人们需要时刻抵抗多种力量干扰对身体重心的影响,并在各种情况下将身体的重心维持在双脚支撑面以内,才能保证身体不会倾倒[2]。与很多动作类似,在人体姿势控制中也存在很多以感觉信息为基础的反馈调节,但由于直立姿势具有不稳定性,应对干扰时反馈调节速度又通常较慢,因此,单靠反馈很难有效调节姿势。很多研究发现,姿势控制中也会存在具有前馈机制的调节方式,这种调节发生在姿势干扰之前,人们会通过预先获得的前馈信息对姿势进行早期调整,更早地降低干扰对姿势的破坏。前馈调节不仅可以对正常人反馈调节速度慢的弱点做出补偿,也可以对一些特殊人群的感觉和平衡能力下降进行代偿,有效降低摔倒的几率。
姿势控制中的前馈调节通常包含两种方式,即预期性姿势调节(anticipatory posturaladjustments,APAs)和预期协同调节(anticipatory synergy adjustments,ASAs)。这两种方式均会对平衡控制起作用,但其作用的方式不同[3]。其中,ASAs是建立在人体姿势肌肉协同控制的基础上产生的一种调节方式。通常情况下,神经系统会将身体多个自由度(degree-of-freedom)涉及到的肌肉群成组控制,通过形成低维度的控制单元来简化动作。ASAs是机体在准备开始一个动作之前,对身体肌肉的协同模式提前做出调整,以保证目标动作在完成过程中不会受到先前不利于该动作的肌肉协同模式的影响,提高动作的绩效,并保证姿势的稳定性[4]。与之不同的是,APAs是在身体产生目标动作或外力干扰前,机体会根据干扰的方向预先激活相应姿势肌肉并形成关节扭矩,抵消掉即将到来的动作和外部力量对姿势的作用力,并保证干扰过程中姿势的稳定[5]。
通常情况下,姿势控制中不论是前馈调节还是反馈调节,都会根据干扰方式做出相应调整。干扰可以根据来源被分为内部干扰和外部干扰,内部干扰为人体自身动作产生的力量和加速度对平衡的影响,外部干扰则是直立姿势受到外力影响而导致身体某阶段位置的改变。前馈调节在这两种状态下都有助于维持姿势稳定,但其作用机制却不尽相同。本文将根据干扰方式的不同特点对姿势前馈控制中的APAs进行综述。
2 内部干扰中的预期性姿势调节
在日常生活中,人们经常需要在直立姿势稳定的情况下,根据目的产生很多自主性动作(voluntary movement)。自主性动作是由身体内部主动产生并带有一定目的性的动作,在动作过程中身体各部位的肌肉和关节通常会分为两种成分,即目标成分和姿势成分,其中目标成分是机体完成动作目标所涉及到的身体部位,而姿势成分则是完成该动作时起到稳定作用的身体部位[6]。研究显示,一个目标动作的产生不仅会带来一定的加速度和惯性,肢体的移动也会造成重心的偏移,因此APAs有助于抵消这种动作的加速度和由于肢体位置改变造成的身体重心的变化[7]。而这种调节之所以被称为“预期”,是因为它在动作对姿势稳定性造成干扰之前的短暂时间内对相应姿势肌肉(postural muscles)进行了调节,从而保证了姿势的稳定和目标动作的完成。
2.1 自主性举臂动作
快速举臂(rapid arm raising)是研究自主性动作中姿势控制机制的常见动作范式,该范式要求被试在直立姿势将手臂(通常为利手)快速举起达到身体前方水平位置,并在这个过程中保持身体稳定,实验者可以根据任务需要要求被试在举臂过程中提起重物,增加举臂负重。在向前举臂的过程中由于动作肌肉(以臂部三角肌为主)收缩使手臂快速移动产生向前向上的力,姿势肌肉(竖脊肌、臀大肌、股二头肌、腓肠肌、腹直肌、股四头肌、胫骨前肌等)则需要产生相反方向的作用力以抵消掉举臂动作对姿势的干扰,这种动作的生物力学特点为研究APAs提供了方法[8-10]。很多实验指出,人体用于维持姿势的肌肉最早会在举臂之前的60~100 ms产生肌电,而且举臂动作越快、力量越大,姿势肌肉的激活程度也会随之增大[8]。Belen’kii[8]认为,身体支持部位肌肉会在举臂之前被激活,并有效抵消了举臂动作带来的干扰,这就是姿势控制中一种典型的前馈调节,其作用则是使姿势在受到自主性动作的干扰前预先进行调整。
按照Belen’kii[8]的说法来看,如果APAs的目的是提前抵消举臂过程的干扰,那么当被试在双手负重情况下举臂,姿势肌肉的预激活会产生更大的代偿。Bouisset等让被试根据信号进行快速举臂运动,同时在被试手上进行不同重量的负重,结果发现,当手上重量大时,姿势肌肉的预期性肌电产生时间与信号之间的时间间隔固定,但动作肌肉肌电产生的时间会相应延迟,这就说明要抵消掉更大力量的动作干扰需要提前更长的时间来调整姿势[9]。在这个过程中,人体需要在动作产生前对物体的重量做出估计,而这种估计通常依赖于日常经验。Bleuse在实验中让被试举起三种不同规格的盒子:小盒子(1 kg)、大盒子(4 kg)、大盒子(1 kg),结果发现,当被试对盒子的重量提前进行估计时,姿势肌肉会产生与该盒子重量相匹配的预期性肌电;但如果被试高估了物体重量,过大的预期调整也会成为干扰,机体会利用本体感觉和视觉反馈信息快速地纠正动作[10]。
在以上实验的举臂动作中预期性肌电会正常产生,但是在一些特殊情况下,这种预期调节会受到影响甚至消失。比如,通常来说,姿势控制的目的是为了维持身体质心(centre of mass,COM)的稳定,但在微重力环境下,由于COM的位置会发生改变,APAs也会发生适应性调整[11,12]。也就是说,APAs在快速举臂中对身体稳定有重要作用,但前提是在重力恒定的情况下。
2.2 自主性迈步起始阶段
直立姿势是很多复杂动作的基础,在日常生活中,迈步是以直立姿势为起点的常见动作。迈步起始阶段(gait initiation)与快速举臂动作不同,快速举臂要求身体保持直立位,APAs的作用是对抗举臂产生的力量,保持身体稳定;而迈步起始阶段是一种从内部打破稳定的姿势状态的过程,APAs的作用则是使身体从内部产生向前移动的原动力[13-15]。在这个过程中,APAs利用站立平面的摩擦力将COM向侧方移动到支撑腿,并向前移动到脚掌边缘,从而迈出第一步。为保证COM的移动方向,腿部肌肉会按照一定的次序产生激活和抑制,并会使足压中心点(centre of pressure,COP)先向与COM相反的方向移动,再向相同的方向移动[16]。有学者将COP的移动轨迹分为前后(anterior-posterior,AP)和左右(medio-lateral,ML)两个方向分别来分析,结果发现,在AP方向上,COP的移动先向后再向前;在ML方向上,COP先移向摆动腿,再移向支撑腿[17,18]。根据COP移动的轨迹可以将迈步起始的过程分为五个阶段:1.反应时阶段,从信号呈现到COP开始移动;2.APAs释放阶段,从COP开始移动到摆动腿足跟的最远位置;3.摆动腿抬起,重心从摆动腿足跟移动向支撑腿足跟部;4.单脚支撑阶段,重心从支撑腿足跟部移向足中心;5.双脚支撑阶段,COP从足心移向足尖。其中,2、3阶段被定义为APAs阶段,4、5阶段被定义为迈步阶段(如图1所示)[19]。
有研究者发现,COP的反向移动是为了使COM的移动获得力量和加速度,如果要求被试以更快的速度迈步,则COP在AP方向和ML方向上的移动幅度会更大,持续时间也会缩短[20]。但也有学者认为,出现这种现象是因为CNS在动作速度和身体稳定性之间进行权衡,APAs可以加快动作速度,但身体在ML方向上晃动增大说明身体稳定性在下降[21]。Yiou的研究也发现,在有姿势威胁(threat to posture)的条件下,COP在ML方向移动幅度会减小、时间延长,这是因为CNS以移动时间的延长来代偿身体在ML方向上的晃动幅度,减小跌倒的风险[22]。由此可见,中枢神经系统(central nervous system,CNS)在自主性迈步中具有重要作用,而CNS既包括意识成分又包括无意识成分,究竟是哪种成分在迈步起始阶段更为重要,有学者通过双重任务范式(dual-task paradigm)进行了研究。双重任务范式为心理学中研究注意的范式,该范式通常要求被试同时完成主、次两个任务,通过观察次任务对主任务绩效影响的情况来判断主任务是否需要注意资源(attentional resources),并进而判断该任务是否为自动化[23]。Uemura等的双重任务研究发现,当老年人完成迈步和心算报数双重任务时,他们在ML方向上APAs的持续时间会延长,作者认为,由于迈步起始阶段是两种稳定状态中间的过渡过程,因此这个阶段是需要注意资源的[24]。此外,Tard等的研究发现,如果在迈步起始阶段通过听觉和视觉给被试呈现两个信号,信号1(听觉)的作用是提高被试的注意,信号2(视觉)为迈步信号,发现信号1之后会产生preAPA,这就说明了在正式迈步之前提高注意会调节迈步起始阶段APAs的释放[25]。
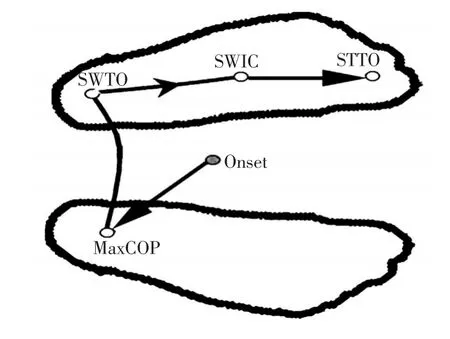
图1 自主性迈步起始阶段COP移动轨迹[19]
可以看出,迈步起始阶段的APAs具有复杂的作用和机制,由于这个阶段存在单脚站立过渡期,因而也具有较高的跌倒风险,尤其对于平衡能力相对较差的群体[26]。很多研究发现老年人在这个阶段的APAs控制能力在下降,因此侧向摔倒率增加。王芸等的研究从肌肉协同控制的角度来解释老年人在此阶段容易摔倒的原因,认为在迈步起始阶段人体的躯干和腿部肌肉会协同收缩,这种肌肉协同促使迈步前COP在AP方向和ML方向上的移动,由于老年人在此阶段对肌肉协同模式的调节能力有所下降,甚至出现肌肉僵化的现象,因此其身体稳定性会下降[27-29]。由于此阶段在姿势控制中具有特殊性和复杂性,针对于这个阶段身体前馈控制的产生作用和机制,以及如何对老年人等特殊群体在此阶段跌倒进行预防,还需要进一步的研究。
2.3 平衡点理论与基于姿势的任务
如上文所说,APAs对于姿势的维持和自主性动作的产生具有重要的作用,姿势肌肉与动作肌肉的激活存在时间差,这是一种依赖于CNS的开放环路控制,其控制的特点为CNS在没有反馈信息的情况下通过预先设定动作命令来完成动作,其生理学本质为前馈调节。平衡点理论(equilibrium point hypothesis)是解释姿势控制中枢机制的一种理论模型,该理论认为,CNS给人体建立了一个参数框架(referent configuration,RC),这种预设的RC会给人体提供一个姿势的平衡位置参数,如果身体的实际姿势与CNS设定的参数值一致,则不会观察到肌肉的激活;如果身体发生偏移,则姿势肌肉会根据预设的参数值进行调整,回到平衡点[30]。很多研究从生理学角度解释平衡点理论,认为骨骼肌具有一定的弹簧机制,长度越长张力越大,肌组织也会根据CNS下达的神经脉冲强度和自身的长度决定其收缩力量的大小。因此,如果CNS给予一个固定的神经脉冲强度,当骨骼肌受到外力牵拉使其伸长时,其收缩力量会随之增大并使其恢复到CNS预定的长度张力平衡点[31]。也就是说,在姿势控制过程中CNS会预先设定参数值,而这个参数值与预期的动作目的有关,如果预期的动作目的是保持直立姿势稳定,或维持身体某部分位置恒定,骨骼肌系统会根据CNS预先设定的参数值对姿势进行调节[7]。
这与其他很多学者解释直立姿势双重任务控制机制的实验结果一致,这些实验中通常使用一种特殊的次任务——“基于姿势的任务”(supra-postural task),这种任务的特点为要求被试控制某个身体结构的稳定性来完成次任务,而控制的结果与任务绩效有关。他们认为,人们控制姿势的目的,就是提高这种基于姿势的任务的绩效。 比如,当要求被试前臂屈曲平端水杯或水平放置的圆柱体时,可以观察到被试为了控制住手中的水杯,会保持前臂位置稳定,同时身体晃动减小,姿势稳定性提高[32-34]。也有研究发现,头部的移动会导致视觉和前庭信息改变,而视觉和前庭觉对于姿势控制具有重要作用,因此,不论躯干和四肢在完成哪些动作,都会先保证头部的稳定,所以作者认为,姿势稳定是需要预先控制头部的稳定[35]。除此之外,Stoffregen等针对姿势-视觉双重任务做了大量研究,他们认为姿势控制的目的是为了保证视线的稳定,从而更准确地获得视觉信息。实验中也的确发现,当被试在完成视觉搜索任务时,姿势动摇水平减小,稳定性提高,并且,当改变视觉目标与人眼的距离时,姿势动摇水平也会有所改变[36-39]。可以看出,当人们为了保持身体某部位稳定时,姿势稳定模式会根据任务的不同而改变,而这种模式则受CNS控制,如果用平衡点理论来解释的话,这就很可能与CNS给姿势预设的参数值有关。
传统的认知心理学认为直立姿势控制是需要注意资源的,因此在姿势控制的同时完成认知任务,会导致姿势稳定性的下降[40,41]。但是近些年很多双重任务研究中发现,在姿势控制的同时完成某些认知任务,姿势稳定性会增加[42],这其中也包括上文提到的基于姿势的任务,因此这些实验结果一直是近些年该领域中来各学派争论的一个焦点。平衡点理论与RC模型为这种实验现象提供了一种有效的解释,并通过很多实验验证了其在生理学中的合理性,为后续研究提供了非常具有参考价值的理论基础。
3 外部干扰中的预期性姿势调节
先前对APAs的研究主要集中在自主性动作中,探讨人们在完成自主性动作时APA对姿势稳定性调节的作用。但是在日常生活中,人们不仅会对自主性动作做出调节,也会面对很多来自外界环境的干扰,比如,站立平面的突然移动、外力的突然撞击等。很多研究发现,APAs不仅可以降低外力对身体平衡的破坏,也可以有效减弱干扰后姿势反馈调节的作用。应对外来干扰时,人体通常会采取两类调节策略,即Feet-inplace调节策略和迈步调节策略,APAs在这两种调节方式中会起到不同的作用。
3.1 Feet-in-placeplace策略
当直立姿势受到外来干扰时,如果干扰强度在一定范围之内,人们会采取Feet-in-place策略来维持平衡,这种策略要求双脚位置保持不动,通过对腹背肌肉和身体两侧肌肉的激活和抑制来调整踝关节、膝关节和髋关节的活动,进而保证直立姿势的稳定[43]。在外部干扰发生后,人体通常会对姿势的动摇情况做出判断,并对姿势进行相应调整,这种调节机制被称为补偿性姿势调节(compensatory posturaladjustments,CPAs)。CPAs是CNS依据外周感觉传入信息产生的一种典型的“自下而上”的闭环控制(close chain control),视觉、前庭觉和本体感觉为CNS提供了身体晃动的信息,CNS再根据姿势改变程度调节相应肌肉和关节扭矩,使身体恢复到平衡位置[44]。从生理学角度来说,CPAs属于反馈调节,人体需要一段时间来对感觉信息进行判断,因此其速度通常较慢。另外,由于CPAs开始时间晚,姿势受干扰程度大,要在这种情况下纠正平衡,CPAs的强度通常比较大[45]。除此之外,有学者对CPAs是否受意识控制进行研究,发现CPAs既包含无意识成分,也包含有意识成分,CPAs肌电最早出现在干扰后30~50 ms,以骨骼肌牵张反射为主,属于无意识控制;从120~180 ms以后,CNS开始根据身体晃动大小对姿势进行有意识的调节,使身体恢复平衡[31]。
在外部干扰过程中,APAs发生在干扰之前,通过对姿势肌肉的预激活来调节干扰后CPAs的反应时间和反应强度,与CPAs共同构成了CNS应对突发姿势干扰的神经控制机制。近些年很多学者对APAs和CPAs如何协同控制姿势稳定,以及APAs如何对CPAs产生影响进行了大量研究。Santos等使用重物摆范式对APAs的作用进行研究,实验将重物以长绳悬挂在天花板下面,在其摆动到最低点时撞击被试的肩部,对姿势进行干扰。根据是否让被试看到重物下摆的过程,将实验分为有预期和无预期两种条件,并记录这两种条件下腿部和躯干的姿势肌肉激活情况。结果发现,在有预期信息的条件下,被试姿势肌肉会在干扰(0 ms)到来之前150~200 ms产生APAs肌电,并且会使干扰之后的CPAs肌电积分值显著减小[46]。不仅如此,在预期条件下,干扰后COP位移也会显著减小[47]。这说明在外部干扰条件下,APAs可以有效调节姿势稳定,并减弱CPAs的调节作用。另外,APAs可以同时使无意识阶段(CPAs1)和意识阶段(CPAs2)的CPAs肌电积分值显著减小,说明APAs不仅会影响到CPAs的意识性调节,也会影响CPAs的无意识调节。
一般情况下,无意识的反射性调节是自发进行的,很难被意识控制。但是不仅上述研究中出现这种现象,其他研究中也发现,如果让被试在干扰前就有意识地选择并控制应对干扰的策略,则干扰后无意识阶段的CPAs肌电波幅和激活时间会有明显的变化。比如,在落球实验中被试肱二头肌的无意识调节可以分为三个阶段:M1(单突触反射,干扰后30 ms产生)、M2、M3(Pre-programmed reactions,干扰后70 ms~150 ms),在关节负荷突然增加时,如果将干扰后控制策略从“保持手臂位置恒定”改为“不必控制手臂位置”,则肱二头肌的M2、M3阶段的肌电波幅会显著减小[30]。Weerdesteyn等的研究也发现,在姿势受到突发性干扰时,如果要求被试从“保持平衡”改为“随意摔倒”,干扰之后自动化反射阶段的肌电波幅也会显著减小。可以看出,对动作策略的意识性控制可以影响到干扰后肌肉调节中的无意识成分[48]。另外,王健等对躯干突发减载性失衡条件下腰椎稳定肌的调节进行研究,结果发现,在被试对干扰有心理预期的条件下,可以加快腰部稳定肌的快速反应延时,减小反应强度。这也说明,APAs可以在一定程度上改变干扰后CPAs中的反射性控制过程[49]。
很多研究发现,重力、身体重心位置、干扰方向以及姿势原本的稳定性会影响APAs的产生及大小。比如,飞行员在失重条件下,调节身体姿势的多种感觉信息都在改变,尽管如此,飞行员依然可以在重力改变的情况下维持姿势稳定。因此有人认为,CNS会根据身体重心的改变重新识别身体位置和肌肉活动信息,并使APAs根据这些信息的改变有所调整[50]。Li等在实验中对身体重量做出改变,结果发现,在重力减少时,被试在完成快速举臂实验和落球实验过程中,在垂直方向上身体重心的改变会引起APA肌电波幅的减小,在水平方向上(anterior-posterior,AP)身体重心位置的改变会引起姿势肌肉激活程度增加。作者认为,当重心位置改变时,CNS会采用不同的策略去产生APAs[11,12]。另外,干扰前姿势的稳定程度也会影响APAs的产生[51],在姿势非常稳定或非常不稳定的情况下都会产生很小的APAs。作者认为,在非常稳定的情况下,APAs不必要产生;在非常不稳定的情况下,APAs本身可能就会对姿势造成干扰,它本身可以改变COP及足底剪切力,这时如果站姿本身不稳定,则非常容易失去平衡[52,53]。
可以看出,CNS会根据重心改变而对姿势调整策略做出判断和决策,对于APAs的产生具有重要的作用。而CNS对感觉信息有较强的依赖,因此感觉信息也会影响到APAs的产生。例如,Sambit等的研究发现,视觉有助于外部干扰条件下的姿势稳定,视觉会影响APAs的产生,进而影响CPAs的作用[54]。另外,当被试足底的本体感觉受到破坏时,APAs与CPAs也会有所改变[55,56]。这就说明,CNS对APAs的产生有重要作用,但这种作用的机制是复杂的。对APAs产生机制的探讨是很多学者近些年非常看重的内容,目前尚无确切的说法。
3.2 迈步调整策略
补偿性迈步(compensatory stepping)是身体受到外来干扰时的另外一种调节方式。与Feet-in-place策略不同,迈步策略并不是通过对肌肉和关节的调节将COM维持在固定的双脚支撑面以内,而是通过向外跨步来增大双脚支撑面积,从而使受外力干扰而偏移过大的COM有所支撑,以保证姿势稳定[57]。补偿性迈步与上文所述的自主性迈步存在很大不同,首先,所需时间比自主性迈步更短,被试躯干、腿部肌肉最早会在干扰后的60 ms被激活,而人们意识性动作的产生时间一般要在150~180 ms以上,因此补偿性迈步更像是反射性的、自动化的动作[73];另外,自主性迈步中会存在APAs,帮助产生COM移动的加速度,但在补偿性迈步中APAs是否会产生,尚存在争议。
很多研究认为,补偿性迈步过程中没有APAs,尤其是在干扰突发、干扰方式新颖的情况下[58]。即使APAs会在一些特殊情况下产生,其幅度也会缩小,时间也会缩短,APAs并不是CNS控制下的快速补偿性迈步中的必要机制[59]。有研究甚至发现,APAs对补偿性迈步会起到不利的作用,比如,在帕金森病人中,强行诱发出APAs会导致被试在平衡恢复过程中效率降低,不利于平衡姿势的恢复[60]。也有研究发现,在补偿性迈步之前如果进行预期性准备,当出现干扰之后会发现迈步的潜伏期会延长,而且会经常迈出不恰当的腿调整姿势,这样并不利于姿势的稳定[61]。这些研究都表明,在补偿性迈步反应中,由于迈步调整速度快,APAs会因此而减小或消失。但是Liu等认为,早期的研究中APAs消失可能是干扰方式的特点原因(脚底传送带移动),如果改变一种方式,APAs也有可能会产生。研究选用腰部推力给被试直立姿势进行干扰,结果发现在一些实验试次中会产生APAs,而且APAs的幅度越强,迈步的时间越短[62]。Hyodo等的研究发现,即使使用移动平面进行姿势干扰,APAs也会产生,而且老年人在补偿性迈步过程中的APAs会使其迈步调整有效性提高,这可能由于老年人多种感觉能力和控制能力的老化,APAs可以对这些功能的下降做出代偿[63]。因此,在正常情况下补偿性迈步过程中APAs是否会产生,以及诱发出的APAs对平衡恢复的作用如何,还需要进一步的研究。
Feet-in-place策略与补偿性迈步策略均为人体应对外来干扰时的常见调节策略,CNS是否会依据一定的标准对这两种策略进行选择,目前并无统一说法。有研究者认为,这两种策略的选择与干扰强度有关,干扰强度小时,CNS会选择Feet-in-place策略;当干扰增大而使这种策略失去作用时,机体则通过迈步策略来调节姿势[64]。也有研究发现,补偿性迈步开始的时间非常早,用于迈步的肌肉会在Feet-in-place策略完成之前就被激活,而且这两种调节策略的肌肉也会存在拮抗关系,这就说明这两种策略的选择并不完全因为干扰强度[65]。有研究发现,干扰方式、干扰的新颖性、干扰的速度,这些都会影响策略的选择。因此,CNS使用Feet-in-place策略与迈步调节策略进行姿势调节的机制可能不同,APAs的产生及其作用可能会受到影响。
4 神经、心理机制
针对干扰状态下姿势控制的心理机制,很多学者使用双重任务进行研究。实验在姿势干扰的整个过程中让被试完成某种认知任务,通过两个任务的绩效来反映干扰状态下调整姿势是否需要认知资源。很多结果显示,人体针对姿势干扰进行调节的过程需要注意资源,需要意识性高级脑区的参与,尤其是平衡能力减退的老年人[66]。但是,如果要揭示干扰状态下姿势调整的脑机制,并对姿势调整过程进行干扰前和干扰后的时间划分,进而找出APAs的脑区及成分,双重任务的研究就很难说明问题了。因此,近些年一些学者通过事件相关电位(event-related potential,ERP)技术来研究干扰过程中姿势调整的时间问题[67]。
很多研究发现,大脑皮层对于APAs具有重要作用。Jacobs等的研究发现干扰前大脑皮层产生的意识性脑电成分,实验在干扰前2 s提供一个视觉信号作为干扰的预期信息,然后对被试的姿势进行干扰,结果发现,在视觉信号呈现之后会产生一个伴随性负波(contingent negative variation,CNV),同时COP也会有微小的移动[68,69]。在心理学中,CNV被认为是与期待、注意、动机等心理因素有关的成分,是心理准备状态的反映,提示处于紧张或应激状态。可以看出,在干扰前如果有预期信息的话,大脑皮层会使人提前进入准备状态。不仅如此,干扰后大脑皮层也具有相应的脑电成分。有研究发现干扰后大脑皮层会产生外源性脑电波N1,而且N1的波幅受干扰强度和预期信息的影响。当人处于有姿势威胁的警觉状态下,给予被试没有预期信息的干扰会使其产生波幅更大的N1成分[70-72]。另外,有研究对干扰前和干扰后的脑电波进行分离研究,发现干扰前脑电波(CNV)通常与所预知的干扰强度有关,干扰后脑电波(N1)则与干扰的实际强度有关;如果不能预知干扰的强度,则大脑皮层CNV成分会产生默认的较高水平的预激活[73]。也有研究发现,在一些疾病状态下即使干扰后N1会减弱,其CNV依然会出现[74]。这些研究表明,大脑皮层对APAs和CPAs均有作用,而且干扰前和干扰后具有不同的意识成分。
研究显示,注意、恐高等一些心理因素可以影响到APAs。当站立高度增加时,人体会重新分配注意资源,并会对APAs做出调整[75]。另外,很多神经系统的病变也会影响APAs。帕金森患者迈步起始阶段的姿势稳定性会下降,APAs会减小,并影响到静态和动态平衡的转换,患者更易摔倒[76]。Latash等发现老年帕金森病患者很难与正常人表现出同样的APAs效应,并且认为帕金森病患者的这种改变与其中枢神经通路受损有关[77]。也有研究发现,多发性硬化症患者的APAs反应强度更小、预激活开始时间会延迟,并会使干扰后姿势动摇更大[78]。除此之外,对脑卒中、小脑损伤等疾病病人的研究也发现其APAs会相对正常人有所改变[79]。对神经系统疾病和APAs的研究一方面可以帮助揭示APAs的神经控制机制,另一方面也会为这些疾病患者的平衡改善提供理论帮助。
5 总结与展望
关于预期性姿势调节(APAs)的研究是近些年姿势控制领域的一个热点。研究中发现,APAs既可以在自主性动作中充当重要角色,抵消掉动作的加速度和惯性对姿势稳定性的影响,也可以在姿势受到外来干扰时提早起到稳定平衡的作用,并有效减弱干扰后的补偿性调节。因此,APAs在姿势控制中具有重要的作用。由于对APAs的研究还没有进入成熟的阶段,所以大部分研究都围绕在APAs在姿势和动作中存在的现象和作用上,尚未对其神经心理机制和应用方法进行深入的探讨,因此很难对APAs做出更为准确和全面的解释。近些年的一些研究发现,APAs可以通过训练获得,并对人体姿势调节发挥作用,这就有可能为很多平衡能力下降的特殊群体提供帮助[80]。而人们平衡能力下降的原因常常是神经心理机能的老化和病变,因此,揭示干扰状态下APAs的神经心理机制可以对老年人和神经类疾病病人的摔倒预防和平衡改善提供理论基础。但由于受研究方法的限制,前期的很多探索只能在动物实验中进行,对人类的研究则刚刚兴起。随着神经科学的进步,该部分研究想必会在不久的将来走向前沿。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
小学阅读指南·低年级版(2021年4期)2021-04-20 03:56:27
汽车维修与保养(2021年8期)2021-02-16 00:28:20
文苑(2020年5期)2020-06-16 03:18:10
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:38
中国生殖健康(2019年10期)2019-01-07 01:20:58
小天使·一年级语数英综合(2017年6期)2017-06-07 23:38:11
大灰狼(2016年9期)2016-10-13 11:15:26
工业设计(2016年4期)2016-05-04 04:00:15
健康女性(2016年2期)2016-03-11 09:39:54
