磁电编码器的测量误差分析及倾斜消差滤波
2017-01-07 01:29张坤,周浩
兵器装备工程学报 2016年12期
张 坤,周 浩
(海军工程大学,武汉 430033)
【信息科学与控制工程】
磁电编码器的测量误差分析及倾斜消差滤波
张 坤,周 浩
(海军工程大学,武汉 430033)
在简要阐述以磁电编码器工作原理基础上,重点剖析磁阻传感器的作用机理,分析产生编码器测量误差的几种主要原因,给出误差计算式,提出消除误差方案;重点针对谐波误差提出了一种采用倾斜相角法的谐波滤波模型,以期消除三次谐波为主要杂波所造成的角度偏差,提高磁阻式编码器的抗扰性能;适用于不同尺寸的磁阻传感器。仿真试验表明:该方法的使用可提高编码器测量精度和增强抗扰能力。
磁电编码器;磁阻传感器;误差分析;谐波滤波
编码器是数字伺服系统中的一项重要组成部件,与传统的模拟测量装置相比有精度高,响应快,体积小,使用方便等特点。编码器分光电编码器和磁电编码器两类,与光电编码器相比,磁电编码器具有成本低,体积小,抗干扰能力强,抗污防尘等特点。虽然在同等尺寸下磁电编码器的精度不如光电编码器,但光电编码器对烟尘敏感,对使用环境要求较高,在很多恶劣条件下磁电编码器的适用性更强[1],因此具有非常广阔的应用前景。但由于材料和工艺等方面的原因,磁鼓的磁场分布并不均匀,尤其是高精度的编码器,磁极数越多,磁鼓的空间磁场就越复杂,使编码器的精度难以提高。在强磁场的环境中,尽管磁电编码器带有抗磁扰的外壳,但依然受到周围磁场的影响,使测量精度降低[2]。本文就磁阻式编码器的工作原理和误差进行分析,给出了相位误差、直流偏置误差和谐波误差的计算公式,并针对不同类误差提出解决办法。重点研究倾斜相角法的谐波滤波模型,旨在较好地消除以三次谐波为主要杂波所造成的角度偏差,提高磁阻式编码器的抗扰性能和测量精度。
1 磁编码器工作原理
磁性旋转编码器由磁鼓和磁阻传感器组成。磁鼓表面是一层磁性介质并被磁化成具有偶数个长度为λ的磁极。磁阻元件又称为MR元件,是在玻璃基片上镀上一层坡莫合金(Ni81Fe19)薄膜,采用半导体光刻工艺制成。当外加磁场与流过传感器的电流同向时,传感器阻值几乎不变,当外加磁场与流过传感器的电流垂直时,传感器阻值明显减小[3]。然而,在图1所示的磁鼓与磁阻传感器的位置示意图中,外加磁场始终与流过传感器的电流保持垂直。按照上述规律,MR元件的电阻将始终保持在最低值,不会随磁鼓的转动而改变,更不会输出正弦波。可实际上,MR元件的电阻会随着磁鼓的转动而发生规律性的改变。如果上述的电阻变化规律是正确的,那么这种现象又该如何解释?
其实,导致矛盾的原因和MR元件的形状和材料有关。Ni81Fe19合金薄膜材料的磁阻效应是各向异性的,MR元件呈长条形,其外部包裹着具有各向异性磁电阻效应的磁电阻薄膜,薄膜具有一个易磁化轴,在制备薄膜时外加一个均匀诱导磁场,可形成与长度方向同向的易磁化方向。由于MR元件的长度远大于宽度和厚度,从形状上迫使MR元件中的磁化矢量MS沿着元件的长度方向取向;而MR元件的宽度比厚度大,使磁化矢量MS可沿着宽度方向发生偏转,在厚度方向的偏转很小几乎可以忽略,电流则沿着MR元件的长度方向流动(图2)。图1中,磁阻元件面平行于磁鼓面,且两者之间存在微小气隙,因此从磁阻元件与磁鼓磁极的安装位置来看,只需考虑磁极产生的横向磁阻效应。随着磁鼓的转动,MR元件的电阻阻值R为
R=R⊥cos2θ+R∥sin2θ
其中,R∥为磁化矢量MS的方向与电流方向平行时的电阻值,是MR元件的最大电阻值;R⊥为磁化矢量MS的方向与电流方向垂直时的电阻值,是MR元件的最小阻值;θ为磁化矢量MS与电流的夹角。图1所示的MR元件R1、R5处于磁极处,作用于R1、R5上的磁场切向分量为零,且磁化矢量MS无法沿着厚度方向偏转,此时R1、R5阻值最大。R3、R7位于两极中间,作用于R3、R7上的磁场切向分量最大,此时R3、R7阻值最小。
图1 磁阻传感器与磁鼓位置示意图
图2 磁阻元件工作原理
在实际应用中,磁阻元件都采用图3所示的桥式电路,这样不仅能提高磁阻元件的温度稳定性,而且能够放大输出信号,提高信噪比,同时还可以消除磁场的偶次谐波,提高输出波形品质。当磁鼓旋转时,磁场周期性地变化,磁阻也周期性地变化,且一个磁极对应一个电信号周期。输出波形按照余弦规律变化,A相与B相输出信号相位相差90°。

图3 磁阻元件电路
2 磁编码器误差分析
通常,每对正交信号都包含相位、直流偏置和谐波等造成的误差[4],这些误差很可能会对后级信号处理电路造成影响从而降低系统精度,因此需要对它们进行分析,提出解决办法。
输出电压在理想情况下为正、负幅值相等的两路波形,分别为UA=UO+Ucisinθ和UB=UO+Ucicosθ,其中UO是直流偏置电压,Uci是第i个磁极磁场对应的放大信号幅值,θ是电周期信号中的角度,代表磁极的位置角。信号产生误差的原因有相位不正交和直流偏置不相等。该两相信号的误差表达式为
UA=(1+ζ)UO+(1+α)Ucisin(φ+δ)
UB=UO+Ucicosφ
其中,ζ为直流偏置误差系数,α为幅值误差系数,δ为相位误差系数,UO为直流偏置,Uci为放大信号幅值,φ为信号的电相位。此外,还有磁场谐波等其他原因造成的误差,以下对几种误差进行讨论。
2.1 相位不正交产生的误差
tanε=tan[φ-tan-1(tanφcosδ+sinδ)]=
通常,δ和ε的值很小,因此sinδ≈δ、cosδ≈δ、tanε≈ε,所以电相位误差为
当相位正交度相差6°时,产生的电相位误差如图4(a)所示。最大偏差为0.104 7°。传统的调节相位的方法是在后级电路中添加移相器对输出信号的相位进行手动调节。在文献[5]中,提出了一种基于移相器的相位自动补偿方法。此方法利用数字电位器来代替移相器中的调节电阻器,并通过FPGA控制数字电位器改变阻值,实现相位自动补偿。虽然在该文献中此方法是用于补偿光电编码器的误差,但同样适用于以磁电编码器为反馈器件的数字伺服系统。
2.2 直流偏置不相等产生的误差
假设只有直流偏置误差存在时,B相的偏置比A相大ζ倍,则A相输出信号表达式为
UO+βUci+Ucisinφ
ε=tanε=-βcosφ
直流偏置误差主要由于电桥的四臂电阻不对称所致,如此,在无磁场时两臂输出的电压存在微小压差并在后级放大电路中被放大且在磁场发生变化时继续影响输出电压。当直流偏置的波动达到3%时,产生的电相位误差如图4(b)所示。最大偏差为0.03°。为消除偏置误差,可以在后级电路中增加偏置补偿电路,通过增加一个可变电阻手动调节偏置补偿电压,消除偏置。受文献[5]的启发,也可将可变电阻用数字电位器代替,通过FPGA控制数字电位器改变阻值,还能避免因振动摇摆等导致阻值改变。
2.3 磁场谐波产生的误差
另外一种常见的误差是由于磁场的谐波造成的,这与磁极产生的磁场品质有很大关系。由于采用多极式磁鼓,磁鼓充磁难度大,磁场品质下降,所含的谐波量就比较大,其中含量最大的是3次谐波和2次谐波。由于磁性传感器采用了桥式电路,所以消除了偶次谐波的干扰,只剩下3次谐波为主要干扰源,则包含谐波干扰的信号表达式为
UA=Ui1sinφ+K3Ui1sin3φ
其中,K3为3次谐波相对于基波的比例系数;Ui1为基波分量的幅值。由于K3、ε的值都很小,经计算,电相位误差为:
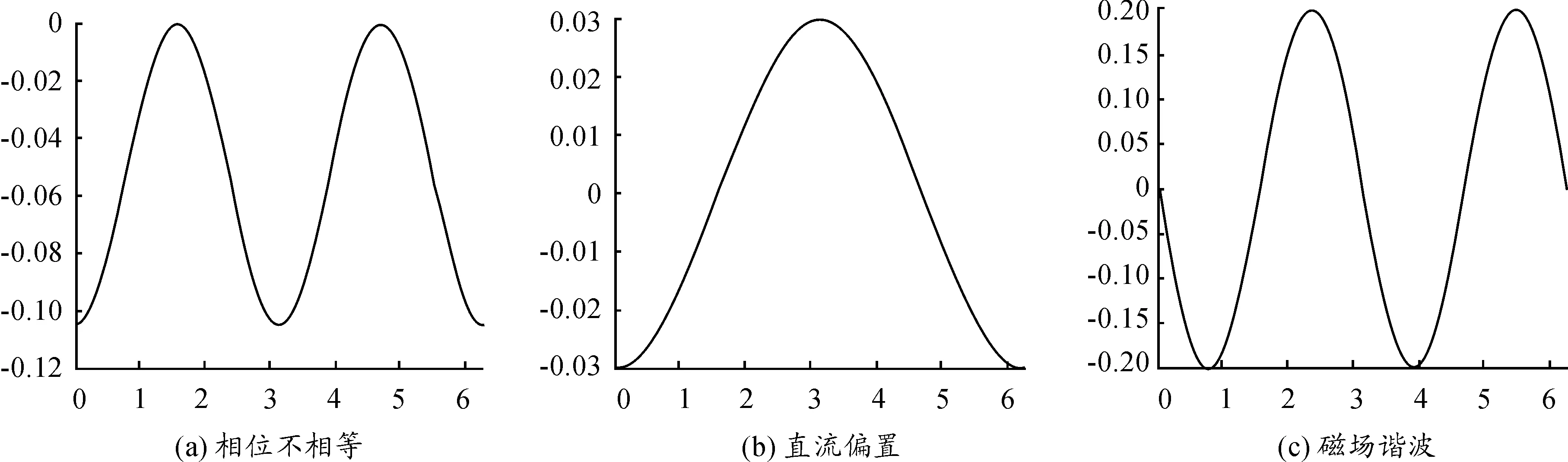
图4 误差模拟图
3 倾斜相角法谐波滤波模型

A相输出电压:
[cos(2k-1)(θ+Δθ)-cos(2k-1)θ]cosθh

图5 倾斜多相滤波模型

图6 l=3 mm,λ=0.8 mm的输出波形
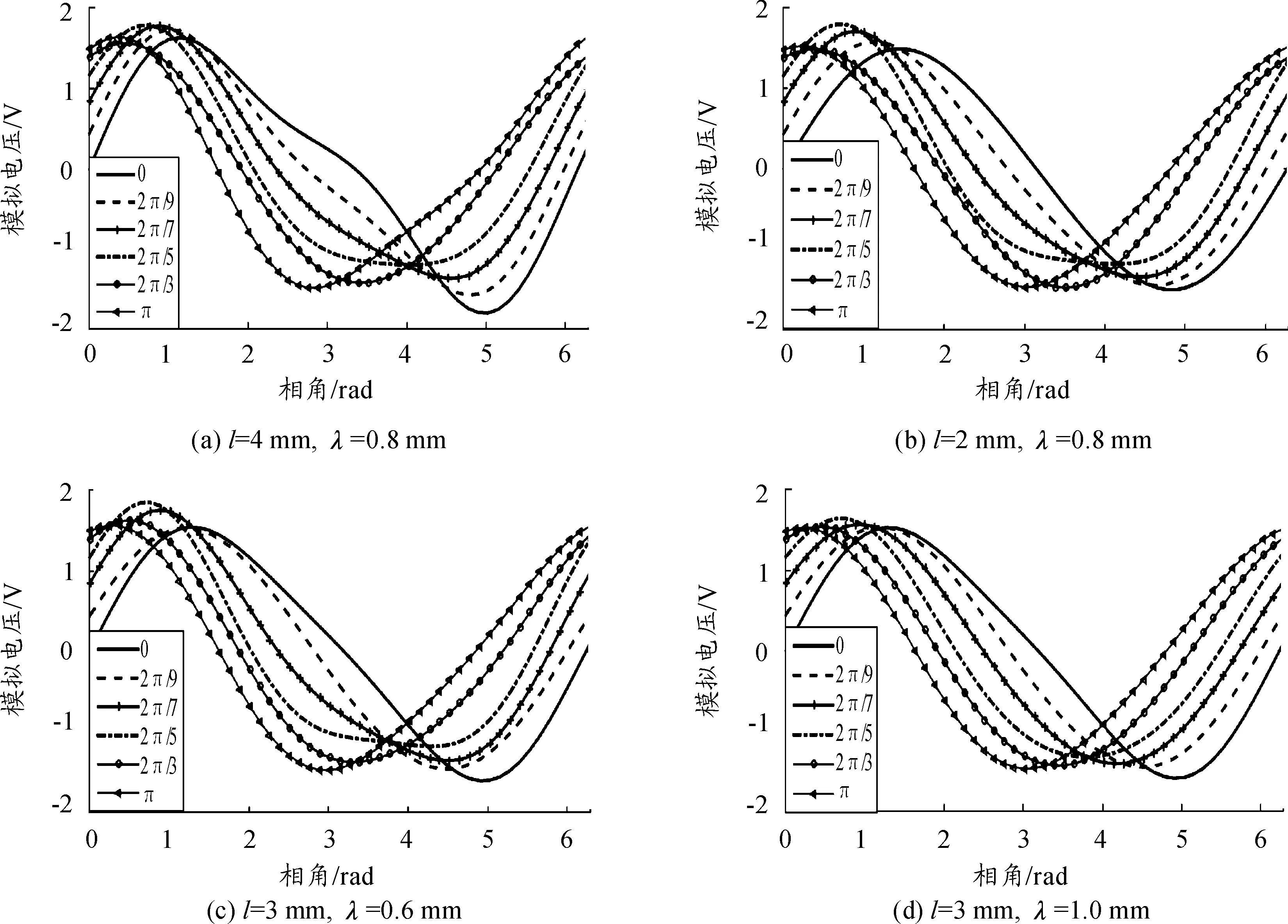
图7 模拟输出电压随相角变化关系
4 结语
[1] 钱正洪,杨昌茂.集成磁电子器件研究[J].计算机与数字工程,2010,38(9):59.
[2] 冯立锋.面向高精度伺服系统的磁电式编码器研究[D].哈尔滨:哈尔滨工业大学,2014.
[3] MIN Zijian,CHEN Qingyong,and ZHENG Wu.The Development of Magnetic Rotary Encoder System Based on High Resistivity MR Film Sensor for Automobile Speed-Measuring[C]//IEEE 2011 Third International Conference on Measuring Technology and Mechatronics Automation,2007:778-779.
[4] 吴浩.基于巨磁阻效应的磁编码器研究[D].哈尔滨:哈尔滨工业大学,2010:28-39.
[5] 张志杰,曹国华,杨艳,等.光电编码器信号相位自动补偿方法研究[J].工具技术,2012(4):76-78.
(责任编辑杨继森)
Errors Analysis and Error-Remove Sloping Filter for Magnetism Encoder
ZHANG Kun, ZHOU Hao
(Naval University of Engineering, Wuhan 430033, China)
This paper analyzed the operating principle of the magnetism encoder and put emphasis on the analysis of the action mechanism of magneto-resistive sensor. On this basis, it analyzed the causes of several main errors of the encoder, and provided the expression error calculation and put forward the solution. Focusing on harmonic wave error, it proposed a harmonic wave filtering model using tilted phase angle method, which could effectively eliminate angle errors caused by clutter mainly including triple harmonic wave as well as improve the anti-disturbance capacity of this encoder. The model was suitable for magnetoresistive sensors of various sizes. The simulation experiment showed that the model could greatly improve the measurement accuracy and the anti-disturbance capacity of the encoder.
magnetism encoder; magnetoresistive sensor; error analysis; harmonic filter
2016-07-25;
张坤(1993—),男,硕士,主要从事装备理论、装备技术以及自动控制研究。
10.11809/scbgxb2016.12.026
张坤,周浩.磁电编码器的测量误差分析及倾斜消差滤波[J].兵器装备工程学报,2016(12):113-117.
format:ZHANG Kun, ZHOU Hao.Errors Analysis and Error-Remove Sloping Filter for Magnetism Encoder[J].Journal of Ordnance Equipment Engineering,2016(12):113-117.
TG806;TP212.1
A
修回日期:2016-09-20
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
中学生数理化·教与学(2018年10期)2018-12-06
电子制作(2018年19期)2018-11-14
电子制作(2017年13期)2017-12-15
北京航空航天大学学报(2016年6期)2016-11-16
理科考试研究·高中(2014年8期)2014-10-17