基于回波特性的直升机载雷达目标探测与识别
2017-01-07 01:29赵亚先
兵器装备工程学报 2016年12期
赵亚先,唐 尧,景 雄
(北方电子研究院,西安 710010)
【装备理论与装备技术】
基于回波特性的直升机载雷达目标探测与识别
赵亚先,唐 尧,景 雄
(北方电子研究院,西安 710010)
研究雷达目标识别的基本方法,比较了传统雷达对于坦克目标的回波幅度检测和基于回波特性的机载雷达高压线探测识别方法,分析目前目标识别和分类用于雷达的难点。
目标识别;直升机载雷达;幅度检测;回波特性;高压线探测识别
随着20世纪科学技术的快速发展,许多新科技应用于国防建设之中。现代战争环境是一个复杂多变的电磁环境,对战场目标的监测和识别显得尤为重要。仅仅的目标探测与跟踪已经不满足目前的战场要求。于是人们将雷达的功能提升到辨别目标几何特征、运行速度、真伪等更详细的目标信息上来。雷达自动目标识别技术应运而生[1-2]。
首先对过去的设置门限检测回波幅度的方法进行试验分析,因为目前使用雷达对军用目标经行分析存在种种困难。而高压线又对直升机造成严重影响,所以首先将对高压线的探测进行试验分析。
1 目标识别的基本方法
目标识别需要经过两个阶段:训练阶段与测试阶段。目前关于目标识别还有在线学习这一阶段。在本研究中重点关注训练与测试阶段。
训练阶段:① 预处理;② 特征提取;③ 特征选择;④ 分类器设计[3-4]。预处理阶段:主要进行信号处理工作,对回波进行去噪滤波。
特征提取:目标回波可以看作是目标类型、距离和方位等参数的多元函数,这样回波显然无法直接用于目标分类。所以必须通过信号处理,提取目标特征信息,将信号空间转化为特征空间。
特征选择:目标有多重类型特征,在进行分类器设计之前,要根据目标本身特点对特征进行选择。常用特征有目标的RCS,熵特征,峰值个数,功率谱等。
分类器设计:目前常用的有SVM(支持向量机),PCA(降维处理),神经网络以及过去最常使用的模板匹配法。
在训练阶段,需要训练大量的试验样本建立训练样本数据库。
测试阶段:① 预处理;② 特征提取,③ 特征选择;④ 分类器判决;⑤ 输出结果[4]。
在建立了训练样本数据库后,需要对测试目标进行探测识别,并对不属于样本库的目标进行拒判,属于样本库的目标进行分类输出。
2 传统回波幅度监测进行的目标输出
该实验基于某型机载雷达,用于探测某型坦克在17.5~21 km范围内运动(由于遮挡原因,雷达发现目标距离起始为18 km左右)。通过设置门限,如果目标在MTD处理后的目标幅度超过门限,即报发现目标。
从18 km(确认目标距离)到20 km跟踪目标,连续观测不同距离、波位下的目标幅度。
图1中,不带点的曲线为回波MTD后的强度,带黑点的曲线为当前参数下恒虚警门限。由图1可见,目标幅度明显超过恒虚警门限,因此目标能够被检测到。

图1 18.01 km目标强度
由图2可见,目标仍在第41多普勒通道,距离为18.03 km。目标幅度明显超过监测门限,依然可以被探测到。
图2 18.03 km目标强度
图3中目标运动到20 km左右时,目标幅度明显减弱。目标在20.11 km时,幅度相对18 km处明显降低。虽然依然超过检测门限,但通过对比可以发现目标在18 km附近的数据,幅度在4 500左右;比对目标在20 km附近数据,幅度在2 700左右(0.6倍左右)。18 km与20 km的距离比值为0.9,因此相同截面积目标的在这两个距离段的回波强度比值为0.656 1。
图3 20.11 km目标强度
通过本次试验,可以看出,运用传统的MTD监测方法。雷达可以对目标经行识别,并在显控设备上显示。但无法对目标的类别进行判断。在大部分情况下需要先验信息进行支持。针对这种情况,提出了目标识别分类这一要求。军用目标探测识别,建立数据库极其困难,存在干扰物类极多,目标分类所需运算量极大等问题,所以在下一节中首先解决高压线探测与识别这一问题。
3 利用回波形状识别高压线
1) 信处端处理任务:对恒虚警过门限的点,进行粗距离单元的距离凝聚,即对于连续的过门限点,仅保留幅值最大的点作为过门线点。保留前一距离单元、本距离单元、后一距离单元的64点细分辨IFFT结果(共192个点),进行后续的拼像和识别。对于过门限的粗距离单元,找出该粗距离单元IFFT后最大幅度点的序号(1~64)。拼接像以该点为中心拼接前后各一副距离像的细分辨点,合成拼接后的距离像并作归一化处理[5]。
2) 数处端处理任务
a) 方位纬凝聚
对方位连续,距离间隔在20m(3个粗距离分辨单元)内的点进行方位凝聚。即对于方位上连续出现的点只对幅度最大点的合成距离像保留并进行识别[5-7]。
b) 特征提取
记录图像特征,即目标像的(主峰宽、次峰高、主次间隔、再次峰高、主再次间隔、峰数)等特征信息[5]。
c) 识别分类
根据特征信息进行目标分类,将目标分为塔(类型1)、疑似塔(类型2)、非塔(类型3)、其他(类型4)4类目标。
d) 帧间关联稳定
历史点迹仅保留类型1的目标,根据惯导信息将这些点补偿到当前帧下并进行关联。只要能关联上则该目标类型仍为1(例如,关联到的点位为类型3,但记录该点的类型仍为1)。关联后,累计其被识别成塔的次数(最多5次),以及连续未被识别成塔或疑似塔的次数(若连续6次未被识别成塔,则该点被判决为非塔,不参与下次关联)。对于连续4次没有关联上任何目标的塔点也从历史点中删除,不参与下次关联。
e) 高压线连接
对于类型1目标比较它们被识别成塔的次数n,以n值最大者作为高压线连线的起始点。连线的对象为塔点/疑似塔点和其他点。以起点为中心在200~800 m范围内搜索可供连接的点,搜索顺序分别为塔点→疑似塔点→其他点,即如果某个塔点在200~800 m范围内找到其他塔点可供连线则不再在疑似塔点和其他点的集合中继续搜索。
若某个塔点在200~800 m搜索到多个可连接点,则按连线的矢量角进行高压线走向连接。
3) 高压线探测结果输出
完成信处端与输出端的工作之后,高压线走向的链接工作完成。随后可在显控端进行结果输出,并对飞行员进行高压线告警。
4 利用回波形状判别高压线的实验数据
选择雁引路作为实验地点,根据肉眼估计距雷达1.5 km到2 km的左方和右方各有两个高压塔,但受地理条件限制无法进行定标,场景周边房屋道路多,地形复杂。
在识别结果图4中:① 五角星代表识别高压塔点(高可能性);② 六角星代表识别疑似高压塔点;③ 叉代表识别非塔点;④ 圆圈代表其他点(既不符合塔点的判决条件也不符合非塔点的判决条件)。
图4 雁引路识别结果
图4为雁引路0到10 km雷达观测点的识别结果。根据当时的场景,肉眼判断高压塔距雷达1.5 km到2 km左方和右方各有两个高压塔。在图4的基础上,进行目标的判定与分类,在显控上即可显示出图5的结果。
由图5可见,在2 km左右被识别出5个高压塔(其中有一个高压塔在两个波位上被识别了2次,由于这两个波位不连续所以没有被凝聚)。
这4个塔的距离和方位依次为:
R= 1.531 2, 1.962 9, 2.025 3, 1.937 5 km
Az= -28°, -12°, 1°, 14°
基本符合当时肉眼观测到的塔位置,另外该距离段内除了这4个塔外没有再判决出其他的塔。
在这次实验中可以看到,首先有高压塔被识别两次,但不影响对飞行员告警。其次雷达回波不稳定。同一个场景,上一大帧和下一大帧(全波位扫描一次称为一个大帧),获取的目标点迹及点迹识别结果存在差异。这一方面需要在日后的工作中努力改进。
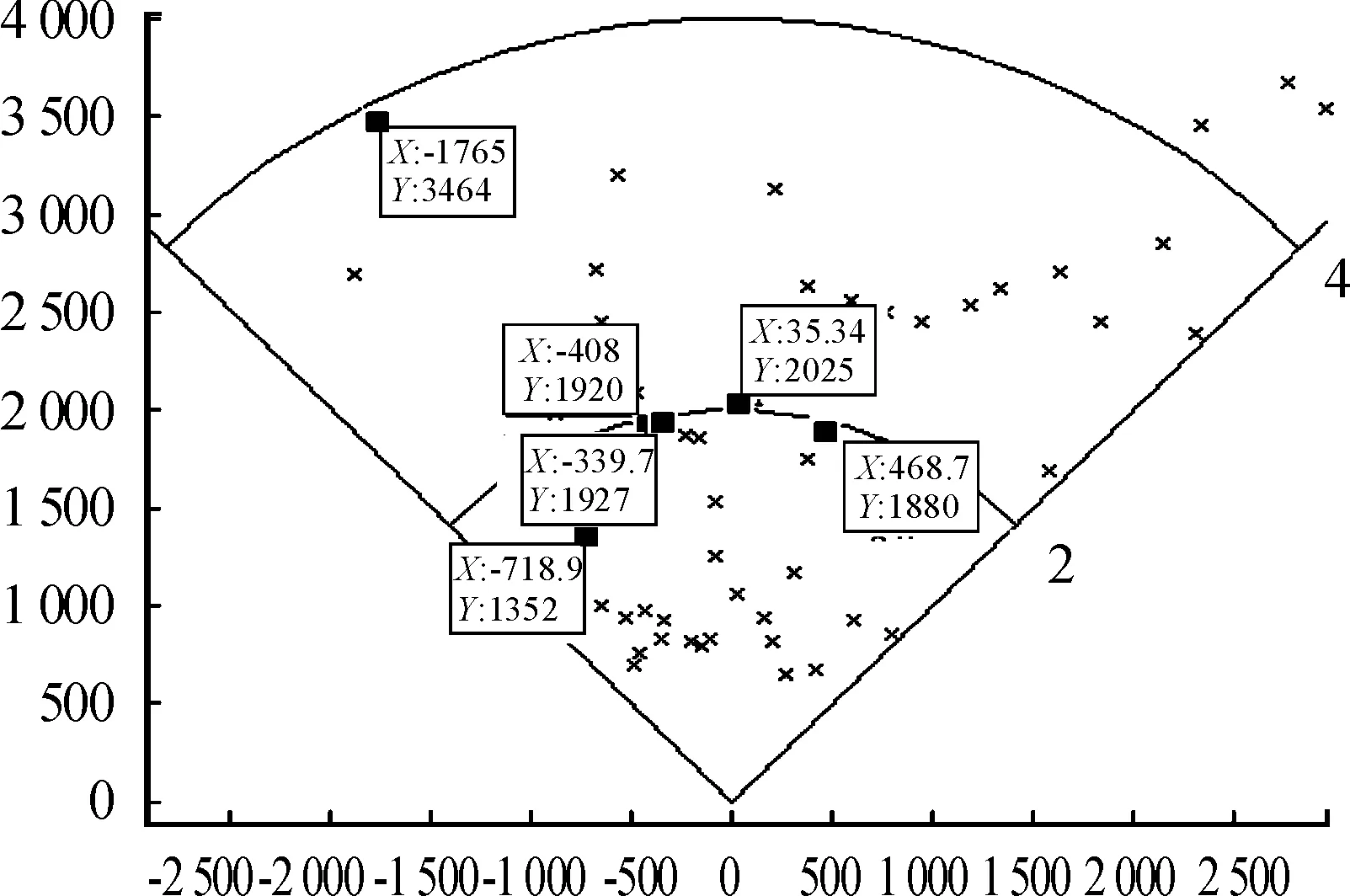
图5 雁引路4 km内识别塔点标定
5 结束语
传统的雷达技术只能实现对目标的探测与显示。为了适应现在战场复杂多变的环境,对雷达提出了对目标分类识别的要求。本文首先对传统雷达探测方式进行了试验。目前对战场目标分类识别存在很多困难,所以对高压线的分类识别进行试验。
[1] 马林.雷达目标识别技术综述[J].现代雷达,2011,33(6):1-7.
[2] ZHU M,MARTINEZ A M.Subclass Discriminates Analysis[J].IEEE Trans Pattern Analysis and Machine Intelligence,2006,28(8):1274-1284.
[3] 王晓丹.雷达目标识别技术综述[J].现代雷达,2003,25(5):22-26.
[4] 董鸿鹏.面向雷达图像仿真的三维实体模型表示方法[J].兵器装备工程学报,2016,37(2):155-158.
[5] 张明.直升机载毫米波雷达高压线防撞处理研究[J].火控雷达技术,2016,45(2):7-12.
[6] 保铮.王彤著.雷达成像技术[M].北京:电子工业出版社,2005.
[7] 刘晨.基于两坐标雷达和红外传感器的融合目标跟踪算法[J].探测与控制学报,2005,27(5):45-50.
(责任编辑周江川)
Helicopter Radar Detected and Recognized Based on Echo Characteristic
ZHAO Ya-xian, TANG Yao, JING Xiong
(Northern Electronic Engineering Research Institute, Xi’an 710010, China)
Though discussing the basic theories of target recognition, being compared the traditional radar target detected that setting the threshold to detected the target and the new method that using the echo characteristic to recognize the target, we analyzed the difficulty of target detected and recognized using to helicopter radar.
target recognition; helicopter radar; setting threshold of amplitude; echo characteristic; power line detection
2016-09-20;
赵亚先(1991—),男(满族),硕士研究生,助理工程师,主要从事火控雷达研究。
10.11809/scbgxb2016.12.012
赵亚先,唐尧,景雄.基于回波特性的直升机载雷达目标探测与识别[J].兵器装备工程学报,2016(12):48-50.
format:ZHAO Ya-xian, TANG Yao, JING Xiong.Helicopter Radar Detected and Recognized Based on Echo Characteristic[J].Journal of Ordnance Equipment Engineering,2016(12):48-50.
V275.1
A
2096-2304(2016)12-0048-03
修回日期:2016-10-11
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
股市动态分析(2021年25期)2021-12-30
躬耕(2020年2期)2020-03-16
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
火力与指挥控制(2019年4期)2019-06-14
宇航计测技术(2018年3期)2018-09-08
火控雷达技术(2016年2期)2016-02-06
股市动态分析(2014年27期)2014-07-29