
基于矢量图的力状态映射法辨识参数误差分析
2017-01-06 10:27:47蒋国庆李家文唐国金
振动与冲击 2016年24期
蒋国庆, 李家文, 唐国金
(国防科学技术大学 航天科学与工程学院,长沙 410073)
基于矢量图的力状态映射法辨识参数误差分析
蒋国庆, 李家文, 唐国金
(国防科学技术大学 航天科学与工程学院,长沙 410073)
力状态映射法被常用于辨识非线性连接结构的等效动力学参数,该方法需要用到实验仪器测量得到或者经过微分或积分计算得到的激励力、速度、位移、加速度等数据。而往往这些数据的相位会出现失真,这会直接导致通过力状态映射辨识得到的系统参数出现误差。用矢量图法计算得到了单自由度系统在强迫振动和自由振动两种情况下出现测量数据或计算数据小幅度相位失真时的误差计算公式,结果表明这种小幅度相位失真对系统阻尼系数的影响明显大于对系统刚度系数的影响,且当激励力频率等于固有频率时辨识参数的误差最小。
矢量图;力状态映射法;参数辨识;误差分析
现代航天器大量使用连接结构,这些连接结构是系统非线性和无源被动阻尼的主要来源之一,连接结构线性模型常常不能反映其非线性特性,必须采用非线性模型,而非线性模型的参数辨识问题是必须解决的关键问题之一,一直以来都是学者们的研究热点[1]。
力状态映射法是一种用于辨识非线性结构的常用方法,该方法将连接结构的回复力表示为速度和位移的函数,能够直接显示系统的刚度特性和阻尼特性。该方法最初由MARSI等[2-3]提出,并经CRAWLEY等[4-5]加以发展和利用。AL-HADID等[6]选用一般多项式对多自由度集总系统进行了辨识,发现一般多项式与正交多项式相比具有物理意义明确的优点。蔡力钢等[7]采用Tikhonov正则化方法和迭代算法对非线性结合部等效力学模型参数进行了辨识,辨识精度高。吴爽等[8]采用力状态映射法对太阳翼板间铰链结构非线性动力学模型进行了参数辨识,实验测试结果和数值仿真结果取得了较好的一致性。
力状态映射法是一种时域内的方法,需要通过实验测量得到必要的数据,然而,由于实验仪器没有校准或者对实验数据进行积分或微分处理不恰当会导致各检测量的相位出现失真,从而导致通过力状态映射法辨识得到的系统参数出现误差。WRIGHT等[9]获得了用力状态映射法辨识得到的正弦激励载荷作用下线性系统参数的误差计算表达式。MESKELL等[10]采用矢量图法分别建立了单自由度系统在强迫振动和自由振动两种情况下的模型,分析了激励力、位移或者速度中某一项发生相位偏差时系统刚度参数和阻尼参数的误差。但在实际情况下,可能是某两项的相位发生偏差。本文采用矢量图法推导得到了单自由度系统在强迫振动和自由振动两种情况下某两项发生相位偏差时辨识得到的系统参数误差公式,误差公式可以退化至Meskell和Fitzpatrick得到的公式。
1 强迫振动系统参数误差分析
图1为单自由度系统强迫振动示意图,其中F为强迫激励,其表达式为F=fsin(ωt),m为质量块的质量,k为弹簧刚度,c为阻尼系数。系统振动微分方程为

(1)
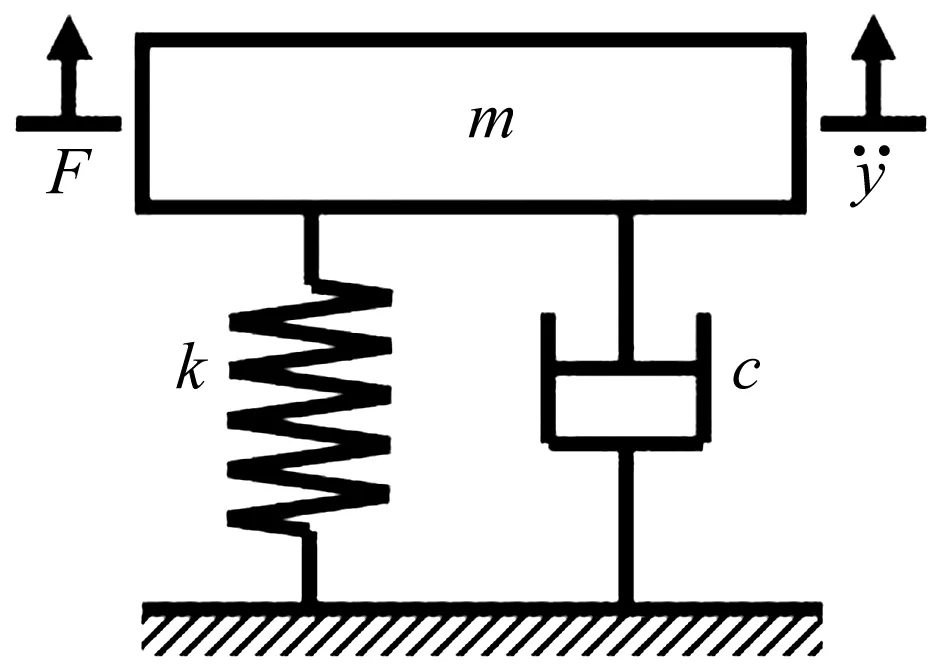
图1 单自由度系统强迫振动示意图Fig.1 Schematic of a linear single degree of freedom system
设y0=Asin(ωt-θ)为式(1)的特解,经过换算可以将式(1)变为
(-mω2+jcω+k)ejωt=fejθejωt
(2)
k=fcosθ+mω2
(3)
c=fsinθ
(4)
mω2=kr2
(5)
由式(3)和(5)可以得到
f=(1-r2)k/cosθ
(6)
如果由于试验时测量设备之间相位没有校准等原因造成测量或者计算得到的各力的相位出现一定的失真,那么通过力状态映射法辨识得到的刚度系数和阻尼系数便会出现误差。文献[10]中已经利用矢量图法计算得到了某一项的相位出现偏差时系统刚度系数和阻尼系数的误差,但实际情况下不能确定发生相位偏差的力的个数,而可能是测量得到的激励力、速度和位移两两出现相位偏差,分别如图2(b)~(d)所示。当测量得到的三个力均出现相位偏差时,可以通过数据处理(如把所有的相位偏差均减去最小的相位偏差)使得其转换为两力出现相位偏差时的情况。
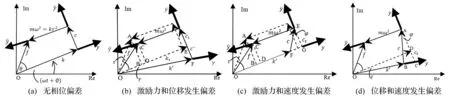
图2 单自由度强迫振动系统矢量图Fig.2 Vector diagrams of a linear signal degree of freedom system for forced response
图2(b)为振动系统测量得到的激励力和位移的相位均出现偏差时的矢量图,其中激励力相位偏差为τ,位移相位偏差为γ,kt和ct为中间刚度系数和阻尼系数,k′和c′为辨识得到的刚度系数和阻尼系数。
由ΔOAB和ΔOCD,可以得到
kt=k+fcos(θ-τ)-fcos(θ)
(7)
ct=fsin(θ-τ)
(8)
由ΔOEF,可以得到
k′=kt/cosγ
(9)
c′=ct+kttanγ
(10)
在此,定义参数误差比
εk=(k′-k)/k
(11)
εc=(c′-c)/c
(12)
由式(6)、(7)、(9)和(11)可得
(13)
若γ=0,则
εk=(1-r2)(cosτ-1)+2ζrsinτ
(14)
若τ=0,则
(15)
将式(4)、(6)、(8)、(10)和(12)可以得到
εc=(cosτ-1)-((1-r2)/2ζr)sinτ+
(r/2ζ+sinτ+((1-r2)/2ζr)cosτ)tanγ
(16)
若γ=0,则
εc=(cosτ-1)-sinτ(1-r2)/2ζr
(17)
若τ=0,则
εc=tanγ/2ζr
(18)
式(14)、(15)、(17)(18)与文献[10]中的结果一致。
同理可以得到其余两种情况下系统刚度系数和阻尼系数的误差公式,如表1所示。
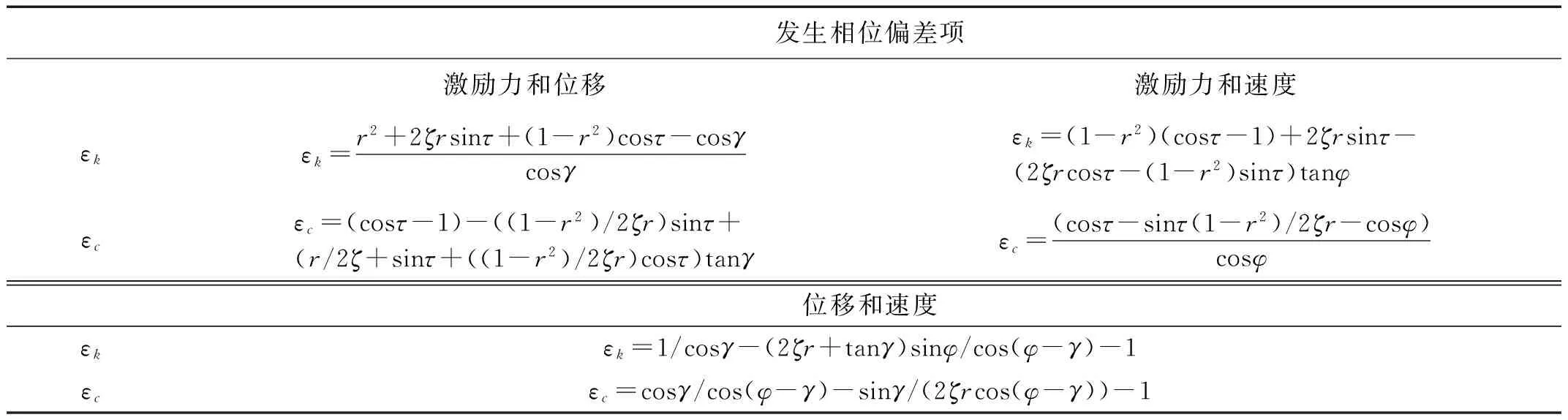
表1 强迫振动系统刚度系数和阻尼系数误差Tab.1 Stiffness errors and damper errors of signal degree of freedom for forced response
2 自由振动系统参数误差分析
图1中激励力F=0时该系统即为自由振动系统,其振动微分方程为

(19)
经过推导可以得到如下式子
(20)
从而有
(21)
根据式(21)可以得到图3(a)所示矢量图。
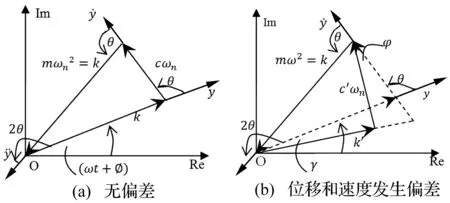
图3 单自由度自由振动系统矢量图Fig.3 Vector diagrams of a linear signal degree of freedom system for free response
3 算例分析
对于图1中的强迫振动系统,取ζ=0.2,τ,γ的变化范围均为[-4°,4°],r分别取0.5、1、2,调用MATLAB对式(13)和(16)分别进行计算,计算结果如图4~图6所示。
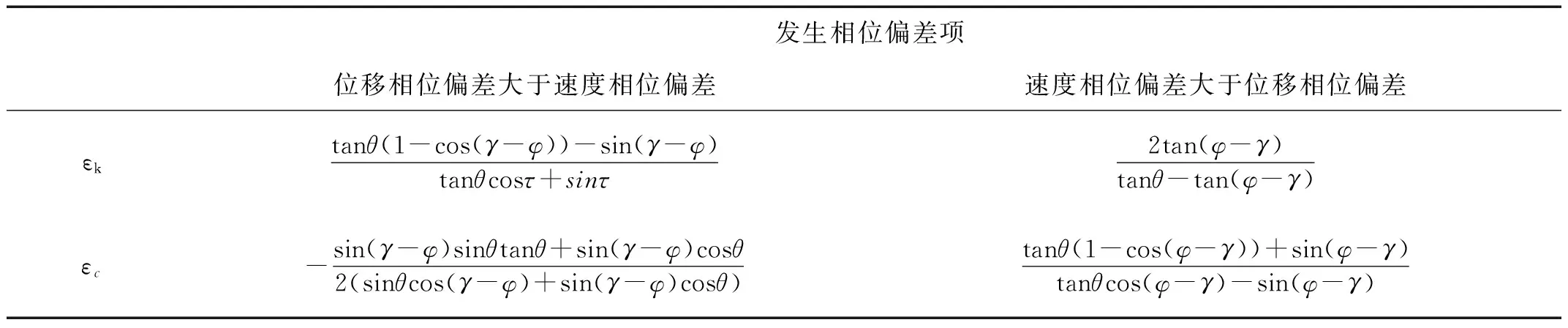
表2 自由振动系统刚度系数和阻尼系数误差Tab.2 Stiffness errors and damper errors of signal degree of freedom for free response
对图4~图6中的计算结果(r=2)统计见表3。
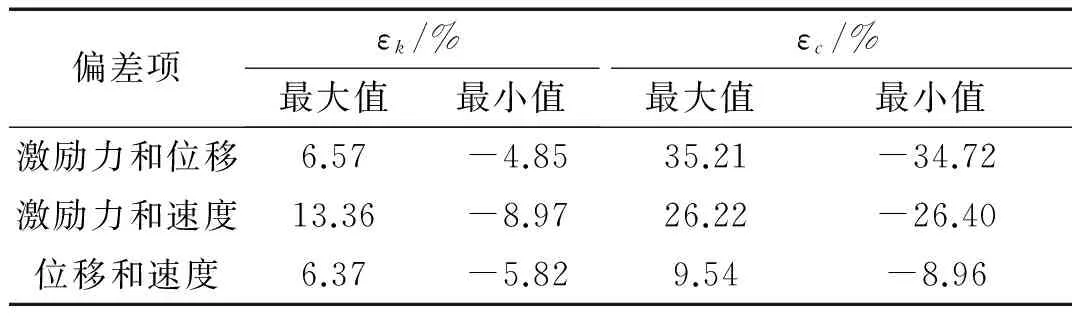
表3 图4~图6计算结果统计表Tab.3 Data from Fig.4 to Fig.6(r=2)
由图4~图6及表3可知:
(1)激励力、位移和速度中任意两项同时发生相位偏差会导致通过力状态映射法辨识得到的系统刚度系数和阻尼系数出现一定误差,误差与激励力、位移或者速度均为近似线性关系,且这种偏差对系统刚度系数的影响明显小于对系统阻尼系数的影响;
(2)激励力和速度相位偏差对刚度系数误差的影响相近,均大于位移相位偏差对刚度系数误差的影响;激励力相位偏差对阻尼系数误差的影响明显大于其余两者的影响;


图4 激励力和位移相位出现偏差时估计参数误差Fig.4Parametererrorwhenphasedistortionhappenedonexcitationforceanddisplacement图5 激励力和速度相位出现偏差时估计参数误差Fig.5Parametererrorwhenphasedistortionhappenedonexcitationforceandvelocity图6 位移和速度相位出现偏差时估计参数误差Fig.6Parametererrorwhenphasedistortionhappenedondisplacementandvelocity
(3)当激励力频率大于固有频率时,刚度系数和阻尼系数误差均随激励力频率与固有频率的比值的增加而增大;当激励力频率小于固有频率时,刚度系数和阻尼系数误差均随激励力频率与固有频率比值的较小而增大;当激励力频率等于固有频率时,刚度系数和阻尼系数误差最小。
4 结 论
本文构造了单自由度系统在强迫振动和自由振动两种情况下的矢量图模型,并推导得到了这两种情况下系统某两个检测量出现相位偏差时系统辨识参数的误差,当退化至某一检测量发生相位偏差时误差公式与文献中对应结果一致。
研究结果表明:
(1)若干检测量的相位偏差会导致系统辨识参数出现误差,其中系统刚度系数受到的影响要明显小于系统阻尼系数受到的影响;
(2)当激励力频率等于固有频率时,辨识参数的误差最小。
目前矢量图法只适用于单自由度系统,对于多自由度系统,需要开展进一步研究。
[1] 吴志刚,王本利,马兴瑞.在轨航天器连接结构动力学及其参数辨识[J].宇航学报,1998,19(3):103-109. WU Zhigang, WANG Benli, MA Xingrui. Dynamic and parameters identification of joints in spacecraft [J]. Journal of Astronautics,1998,19(3):103-109.
[2] MARSI S F, CAUGHEY T K. Anon-parametric identification technique for nonlinear dynamic problems [J]. Journal of Applied Mechanics, 1979, 46: 433-447.
[3] MARSI S F, SASSI H, CAUGHEY T K. Nonparametric identification of nearly arbitrary nonlinear systems[J]. Journal of AppliedMechanics, 1982, 49:619-627.
[4] CRAWLEY E F, O’DONNELL K J. Force-state mapping identification of nonlinear joint[J]. AIAA Journal, 1987,25:1003-1010.
[5] CRAWLEY E F, AUBERT A C. Identification of nonlinear structural elements by force-statemapping [J]. AIAA Journal, 1986, 24:155-162.
[6] Al-HADID M A, WRIGHT J R. Developments in the force-state mapping technique for nonlinear systems and the extension to the location of nonlinear elements in a lumpe-parameter system [J]. Mechanical Systems and Signal Processing, 1989 ,3(3):269-290.
[7] 蔡力钢,李玲,郭铁能,等.基于力状态映射法辨识非线性结合部动态参数[J].机械工程学报,2011,47(7):65-72. CAI Ligang, LI Ling, GUO Tieneng, et al. Identification of nonlinear joint parameters with force-state mapping method [J]. Journal of Mechanical Engineering, 2011, 47(7):65-72.
[8] 吴爽,赵寿根,吴大方,等.太阳翼铰链结构的动力学试验与非线性动力学建模[J].宇航学报,2013,34(12):1550-1556. WU Shuang, ZHAO Shougen, WU Dafang, et al. Dynamic experiments and nonlinear dynamics modeling of joints in solar array [J]. Journal of Astronautics, 2013,34(12):1550-1556.
[9] WRIGHT J R, Al-HADID M A. Sensitivity of the force-state mapping approach to measurement errors [J]. International Journal of Analytical and Experimental Modal Analysis, 1991, 6: 89-103.
[10] MESKELL C, FITZPATRICK J A. Errors in parameter estimates from the force-state mapping technique for free response due to phase distortion [J]. Journal of Sound and Vibration, 2002,252(5):967-974.
Error analysis in parameters from the force-state mapping method based on the vector diagram
JIANG Guoqing,LI Jiawen, TANG Guojin
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
The force-state mapping is usually used to identify the equivalent dynamic parameters of a nonlinear joint, which needs lots of data from instruments or from differential or integral, such as excitation force, velocity, displacement, and acceleration. If those signals happen to suffer phase distortion, parameters identified from the force-state mapping will carry errors. Error formulations of identified parameters were derived by the vector diagram when the single degree of freedom system suffered a narrow range of phase distortion. The results indicate that the system stiffness is influenced heavily by the narrow range of phase distortion compared with the system damping.
vector diagram; force-state mapping; parameter identification; error analysis
国家自然科学基金(11502290);工业装备结构分析国家重点实验室项目(GZ15104)
2015-06-29 修改稿收到日期:2015-11-20
蒋国庆 男,博士生,1987年8月生
李家文 男,博士,讲师,1982年8月生
O327
A
10.13465/j.cnki.jvs.2016.24.021
猜你喜欢
长江大学学报(自科版)(2022年1期)2022-02-25 03:24:24
大电机技术(2021年2期)2021-07-21 07:28:38
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
教育教学论坛(2017年34期)2017-08-30 10:32:04
数学物理学报(2016年6期)2016-04-16 04:41:06
现代机械(2015年1期)2015-01-15 03:07:54
中国神经再生研究(英文版)(2014年23期)2014-06-01 09:08:50
客车技术与研究(2014年3期)2014-03-20 14:34:54
