
具有Klobuchar模型背景场的电离层插值方法研究
2017-01-05 01:38:52权冉冉黄劲松孟凡效伍晓勐
导航定位学报 2016年4期
权冉冉,黄劲松,孟凡效,伍晓勐
(1.武汉大学 测绘学院/地球空间信息技术协同创新中心,湖北 武汉 430079;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)
具有Klobuchar模型背景场的电离层插值方法研究
权冉冉1,黄劲松1,孟凡效2,伍晓勐1
(1.武汉大学 测绘学院/地球空间信息技术协同创新中心,湖北 武汉 430079;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)
为了提高网络RTK中电离层插值的精度,提出一种具有背景场的电离层插值方法:在建立电离层模型时将Klobuchar模型作为背景场,结合基站实测的电离层数据,采用基于距离的线性内插模型最终确定流动站电离层信息。这种方法利用了背景场所提供的电离层时空变化特征,可提高电离层插值的精度。实验结果表明,在目前典型的基站间距条件下,该方法能将电离层插值精度提高10%左右,同时将网络RTK流动站定位精度也提高约10%。
网络RTK;电离层延迟;Klobuchar模型;基于距离的线性内插模型
0 引言
在网络实时动态测量(real time kinematic,RTK)中,服务中心通常利用基站数据处理所获得的各基站电离层延迟信息,采用插值或拟合的方法确定流动站的电离层延迟。文献[1]提出了线性内插模型,根据基准站的坐标和流动站的概略坐标通过线性拟合的方法求取流动站的误差改正数;文献[2]提出了基于距离的内插模型,这种方法简单有效,根据流动站与基准站之间的距离长短判定各基准站对流动站的影响,距离越近影响越大,距离越远影响越小;文献[3-4] 提出了线性组合模型,最初是针对单差观测性提出的,线性组合的方法不仅可以削弱或消除电离层误差、对流层误差、轨道误差等空间误差,该方法还能够减弱观测噪声以及多路径效应对定位精度的影响;文献[5-6]研究了低阶曲面模型,该方法利用基准站的坐标和数据,通过最小二乘的方法拟合获得模型的系数,然后利用流动站的概略坐标就可以得出流动站的改正误差;文献[7-10]论述了Kriging插值方法广泛应用于广域地基增强系统中,该方法用简单的平面函数拟合区域的电离层变化趋势,但这种方法仅能满足中纬地区的格网电离层延迟修正的需求。这些方法都未考虑电离层的时空变化特征,所以当电离层较为活跃时,上述方法的结果具有较大误差。
本文在建立电离层模型时,将Klobuchar模型作为背景场,结合基站实测的电离层数据,采用基于距离的线性内插模型最终确定流动站电离层信息。这种方法利用了背景场所提供的电离层时空变化特征,可提高电离层插值的精度。
1 电离层插值模型
1.1 基于距离的线性内插模型
在网络RTK中基于距离的线性内插模型一般以三角形作为解算单元,根据3个基站之间的距离选取2条较短基线公共点作为主站,其余2点作为从站。通过双差观测方程可以求解出主从站之间的双差电离层延迟量。流动站的双差电离层延迟量由式(1)求得:
ΔIi;
(1)

(2)
这种方法认为距离流动站越近的基站贡献越大,距离越远贡献越小。它仅考虑了距离关系,如果基站距离较小或者电离层梯度变化平缓时,这种插值方法的效果很好;但当站间距较大或电离层活跃时,这种方法则不能很好地反映实际情况。
1.2 将Klobuchar模型作为背景场的内插模型
Klobuchar模型是全球定位系统(global positioning system,GPS)导航电文中所采用的电离层模型,它可简单直观地反映电离层的周日变化特性。它将白天的电离层延迟看成余弦波中正的部分,而将晚上的电离层延迟量DC看成是一个常数,余弦波的振幅A和周期P则分别用一个三阶多项式来表示。Kobuchar模型的表达式为

(3)
式中:DC=5×10-9s;TP=50 400 s;t是计算点的地方时。

(4)

(5)
式中:αi和βi为Klobuchar模型参数,通过GPS导航电文获得;φm为电离层穿刺点地磁纬度。
在1个解算单元中首先通过Klobuchar模型计算观测卫星、参考星与基站、流动站的穿刺点处的电离层模型延迟的模型值;然后利用式(6)计算主从站间的模型双差电离层延迟量和流动站处的模型双差电离层延迟量的模型值
。
(6)
再计算基站的双差电离层延迟量观测值与双差电离层延迟量模型值的差异
Δ(ΔI)=ΔIo-ΔIm。
(7)
利用基站的双差电离层延迟量观测值与双差电离层延迟量模型值的差异值,采用基于距离的线性内插模型,插值出流动站处的双差电离层延迟量观测值与双差电离层延迟量模型值的差异Δ(ΔI)u;再结合流动站的双差电离层延迟量模型值ΔIm-u就可求出最终流动站处的双差电离层延迟量
ΔIo-u=ΔIm-u+Δ(ΔI)u。
(8)
将Klobuchar模型作为背景场的内插模型不仅考虑了距离的影响,还通过背景场引入了电离层时空变化特征,能更好地反应电离层的实际情况。
2 实验及结果分析
利用美国NGS CORS的实测数据,分别在平均站间距约为40 km及60 km的2个三角形基站网上进行实验分析。其中将平均站间距约为40 km的区域称为A区,将平均站间距约为60 km的区域称为B区。A区站间分布图见图1,选取mili、mipv、uofm、brig 4个NGS CORS站构网,并对2015-06-12、2015-12-31、2016-01-30 3 d的数据进行分析。B区站间分布图见图1,选取nche、ncma、ncsy、hayw 4个NGS CORS站构网,并对2015-12-31、2016-01-30 2 d的数据进行分析。

图1 基站网选取示意图
2.1 流动站电离层延迟量计算及精度分析
利用本人所在研究团队研制开发的网络RTK软件对基站网数据进行处理获得各基站电离层延迟信息。然后利用各基站电离层延迟信息,通过插值的方法获得流动站处的电离层延迟信息。其中在进行电离层插值时分别采用基于距离的线性内插模型、将Klobuchar模型作为背景场的内插模型。最后将这2个模型插值的结果与直接解算的流动站处电离层延迟量进行对比统计其均方根误差(root mean square error,RMS)。A区中选取mili、mipv、uofm作为基站,brig作为流动站;B区选取nche、ncma、ncsy作为基站,hayw作为流动站。
分析过程是将每天的电离层延迟量选取同时刻数据,归算到同参考星、同观测卫星,然后按GPS时每小时1组统计其RMS。图2~图4给出了A区不同时间双差电离层延迟量的精度对比结果,表1给出了A区双差电离层延迟量的精度分析。图5及图6给出了B区不同时间双差电离层延迟量的精度对比,表2给出了B区双差电离层延迟量的精度分析结果。

图2 2015-06-12 A区双差电离层延迟量精度对比图

图3 2015-12-31 A区双差电离层延迟量精度对比图

图4 2016-01-30 A区双差电离层延迟量精度对比图

时间基于距离的线性内插的RMS/(TECU)Klobuchar背景场内插模型的RMS/(TECU)精度改善率(%)2015⁃06⁃12的所有时段01177011303992015⁃06⁃12的15—24时010980097311382015⁃12⁃31的所有时段00756006879132015⁃12⁃31的15—24时009450080514812016⁃01⁃30的所有时段005480047912592016⁃01⁃30的15—24时00836007231352

图5 2015-12-31 B区双差电离层延迟量精度对比图

图6 2016-01-30 B区双差电离层延迟量精度对比图
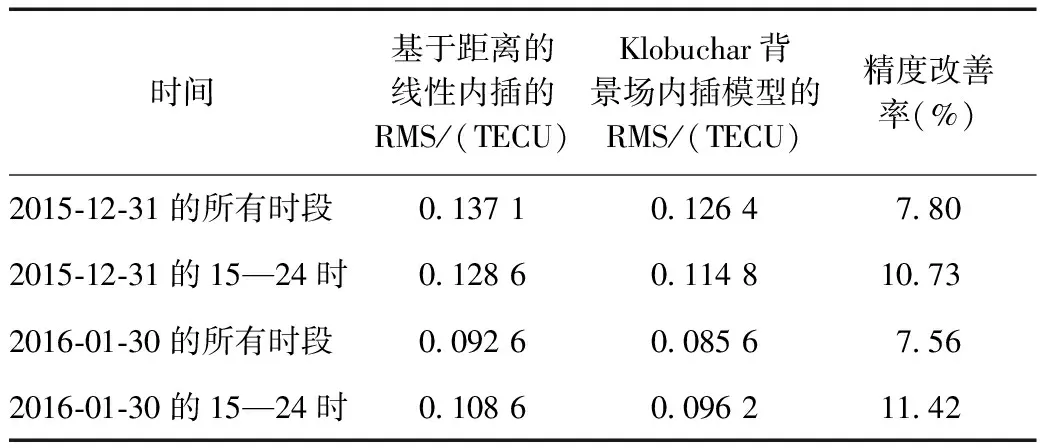
时间基于距离的线性内插的RMS/(TECU)Klobuchar背景场内插模型的RMS/(TECU)精度改善率(%)2015⁃12⁃31的所有时段01371012647802015⁃12⁃31的15—24时012860114810732016⁃01⁃30的所有时段00926008567562016⁃01⁃30的15—24时01086009621142
由图2~图6可以看出,大多数情况下将Klobuchar模型作为背景场的内插模型解算双差电离层延迟量的精度更好,特别是在电离层变化较为剧烈的正午时段(15—22时)。表1~表2也反应了这个情况。基于距离的线性内插模型认为每个历元的站间电离层误差是线性变化的,可以在一个平面上插值出流动站的电离层误差;然而真实的电离层变化却是非线性变化的。在白天将Klobuchar模型作为背景场的内插模型可以在一定程度上反映电离层延迟量的非线性关系,因其给出了具有余弦变化趋势的初始值,且只是在一个平面上插值出模型值与观测值之间的差异,所以其精度能够得到提高。
2.2 流动站RTK定位精度分析
利用所在研究团队研制开发的网络RTK软件对基站网数据进行处理获得各基站对流层延迟和电离层延迟等信息,然后通过插值的方法获得流动站处的对流层延迟和电离层延迟等信息并得到该处的虚拟参考站观测数据。其中在进行电离层插值时分别采用与距离相关的内插模型和将Klobuchar模型作为背景场的内插模型。最后利用实时动态定位函数库(real time kinematic library,RTKLIB)软件对虚拟参考站和流动站观测数据进行RTK解算并分析其精度。A区中选取mili、mipv、uofm作为基站,brig作为流动站;B区选取nche、ncma、ncsy作为基站,hayw作为流动站。
数据分析过程将每天的数据按GPS时每小时分成1份,选取2种模型计算结果都是固定解的时刻的数据进行处理,将结果分别与2流动站的已知坐标进行对比,计算其三维和平面的精度。实验时所有的配置项都不更改,只更改计算流动站处电离层延迟量的模型,那么定位结果的差异仅由不同插值方法所得流动站处电离层延迟量引起;因而根据定位精度的高低就可以间接反映电离层模型精度的高低。
图7~图9给出了A区不同时间流动站RTK的定位精度对比结果,表3给出了A区三维定位精度分析,表4给出了A区平面定位的精度分析;图10~图11给出了B区不同时间流动站RTK的定位精度对比结果,表5给出了B区三维定位的精度分析表,表6给出了B区平面定位的精度分析。
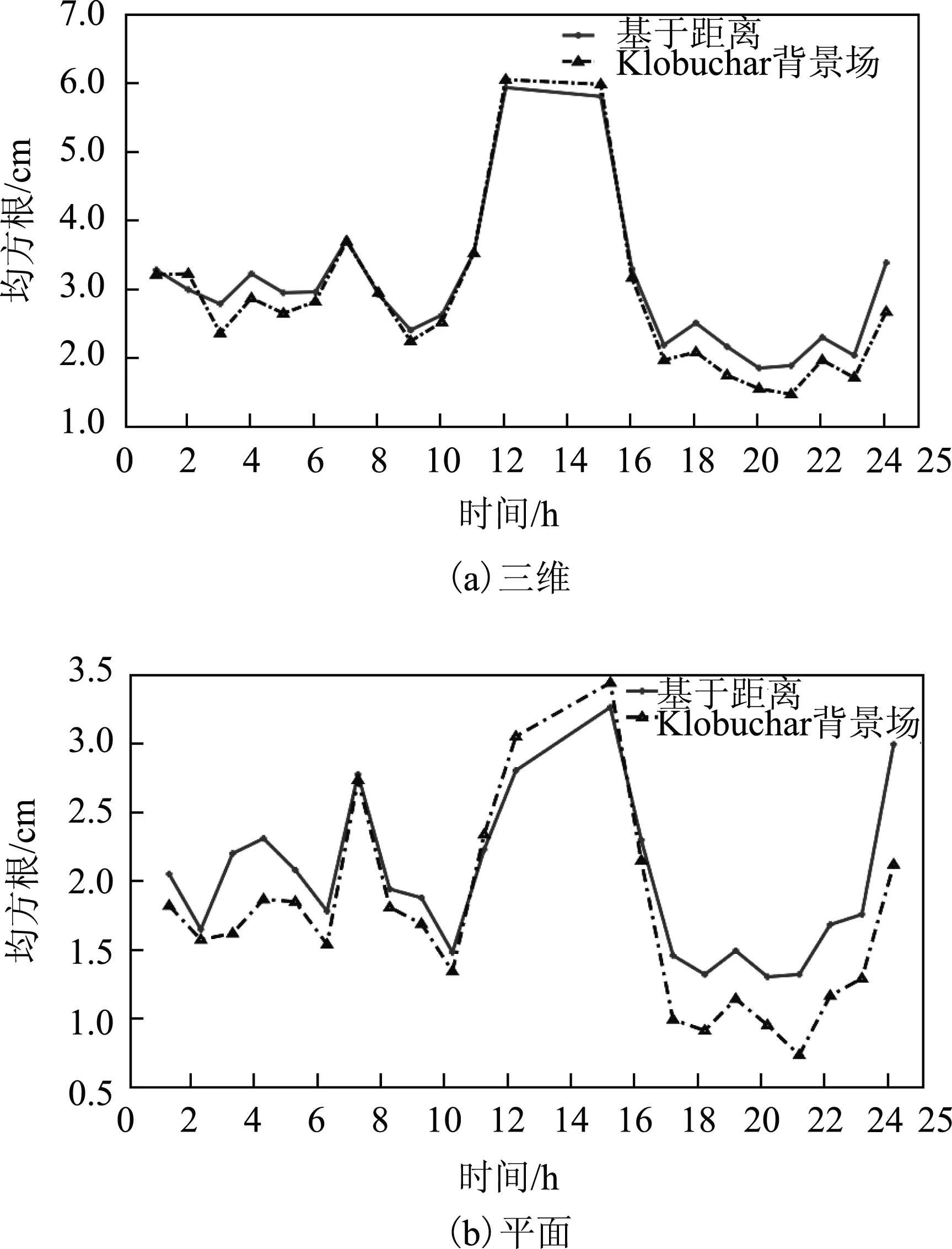
图7 2015-06-12 A区定位精度对比图

图8 2015-12-31 A区定位精度对比图

图9 2016-01-30 A区定位精度对比图
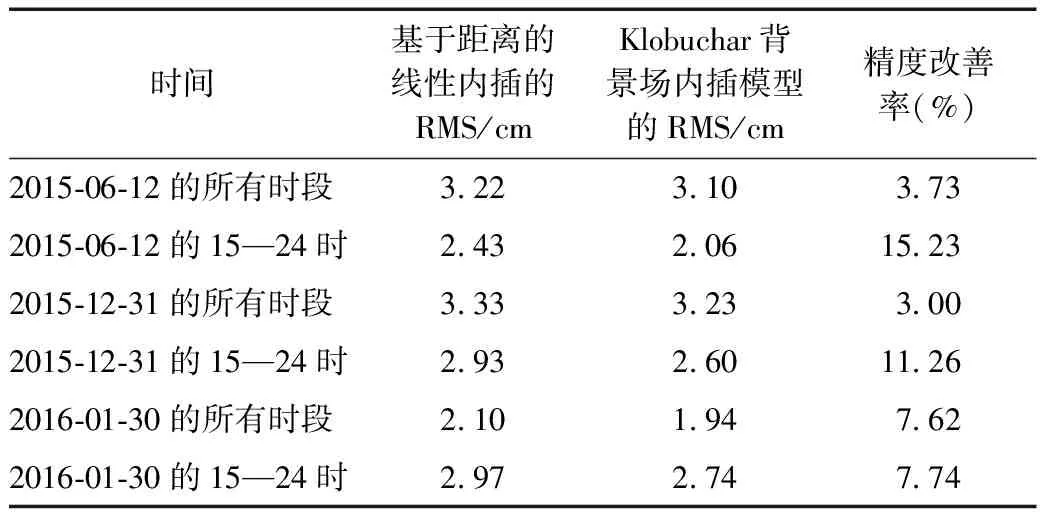
时间基于距离的线性内插的RMS/cmKlobuchar背景场内插模型的RMS/cm精度改善率(%)2015⁃06⁃12的所有时段3223103732015⁃06⁃12的15—24时24320615232015⁃12⁃31的所有时段3333233002015⁃12⁃31的15—24时29326011262016⁃01⁃30的所有时段2101947622016⁃01⁃30的15—24时297274774
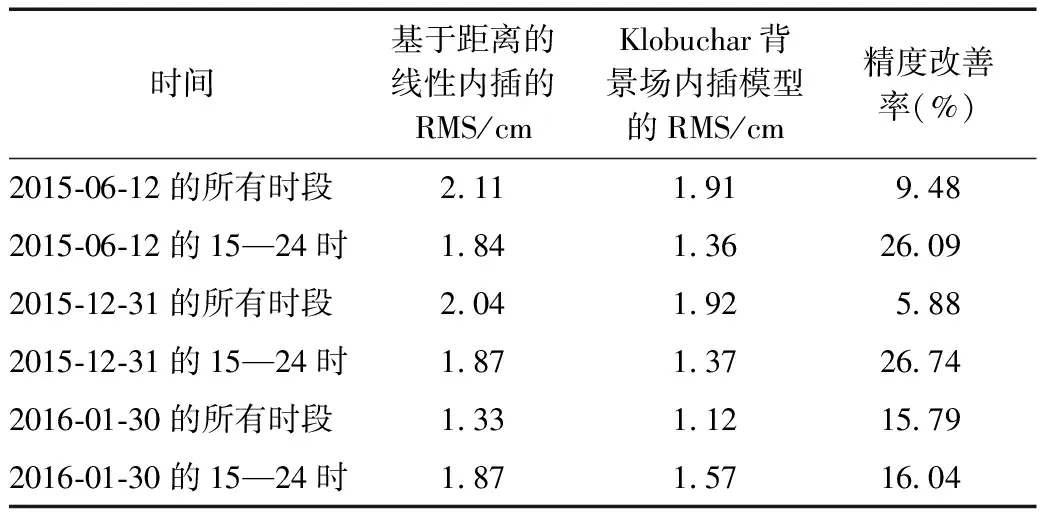
表4 A区平面定位精度分析表
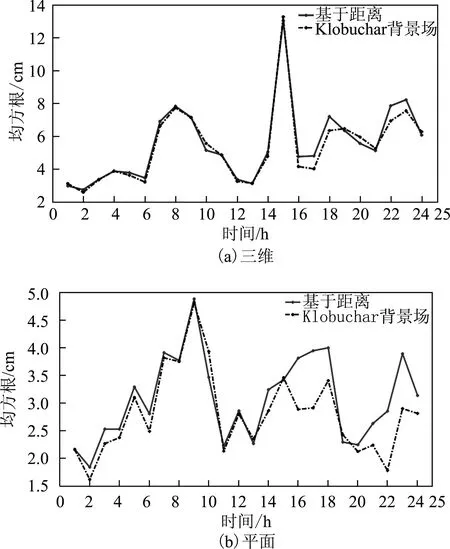
图10 2015-12-31 B区定位精度对比图

图11 2016-01-30 B区定位精度对比图
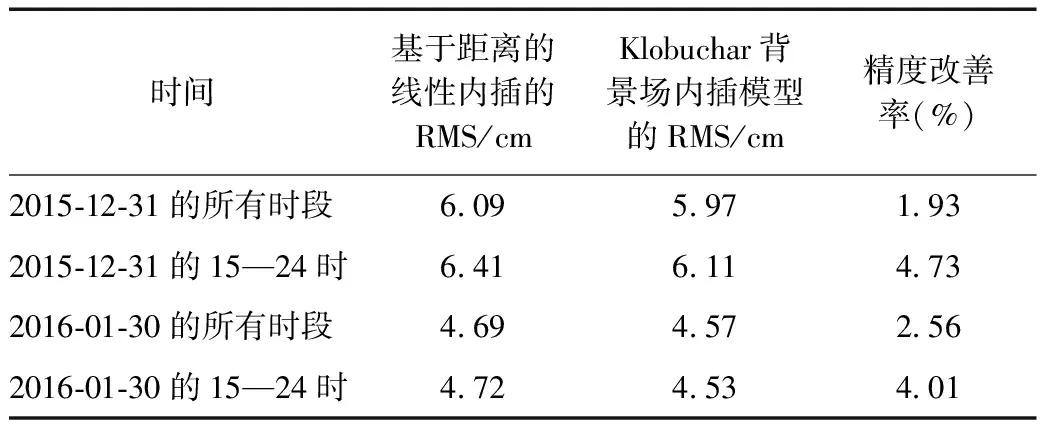
时间基于距离的线性内插的RMS/cmKlobuchar背景场内插模型的RMS/cm精度改善率(%)2015⁃12⁃31的所有时段6095971932015⁃12⁃31的15—24时6416114732016⁃01⁃30的所有时段4694572562016⁃01⁃30的15—24时472453401

表6 B区平面定位精度分析表
由图7到图11可以看出大多数情况下将Klobuchar模型作为背景场的内插模型可以有效提高电离层模型精度,特别是在电离层变化较为剧烈的正午时段(15—22时);表3到表6也反映了这个情况,特别是平面精度效果更明显。基于距离的线性内插模型只考虑了电离层延迟量与站间距离的线性关系,没有考虑纬度、地方时等对电离层延迟量的非线性关系。将Klobuchar模型作为背景场的内插模型可以在一定程度上反映电离层延迟量随纬度和地方时的非线性关系。
3 结束语
本文提出了一种以Kloubuchar模型作为背景场的电离层插值方法,这种方法为插值引入了反映电离层时空变化的信息,提高了电离层插值的精度。利用美国NGS CORS数据,采用不同电离层插值模型,对生成的流动站数据进行定位分析。分析结果表明,将Klobuchar模型作为背景场的内插模型能更好地反映出流动站的电离层特性,不仅能够提高流动站的电离层延迟量的外符合精度,还能够提高网络RTK定位的外符合精度。
影响电离层延迟量的因素很多,机制又较复杂,且Klobuchar模型采用全球统一的系数,因而Klobuchar模型只能大体上反映电离层的全球平均状况,与各地的实际情况必然会有一定的差异。这反映在极个别时段将Klobuchar模型作为背景场的内插模型比基于距离的线性内插模型的结果略差。在后续的研究中,可以用其他更精细的模型代替Klobuchar模型作为背景场并进行数据分析。精确的背景场模型能够更好地反映电离层的变化,更精确地插值出流动站的电离层延迟量。
[1] WANNINGER L.Improved ambiguity resolution by regional differential modelling of the ionosphere[C]//The Institute of Navigation.Proceedings of the 8th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 1995).Palm Springs,California:The Institute of Navigation,Inc.,1995:55-62.
[2] GAO Y,LI Z,MCLELLAN J F.Carrier phase based regional area differential GPS for decimeter-level positioning and navigation[C]//The Institute of Navigation.Proceedings of the 10th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 1997).Kansas City,Missouri:The Institute of Navigation,Inc.,1997:1305-1313.
[3] HAN S,RIZOS C.GPS network design and error mitigation for real-time continuous array monitoring systems[C]∥The Institute of Navigation.Proceedings of the 9th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 1996).Kansas City,Missouri:The Institute of Navigation,Inc.,1996:1827-1836.
[4] HAN S,RIZOS C.Instantaneous ambiguity resolution for medium-range GPS kinematic positioning using multiple reference stations[C]∥International Association of Geodesy Symposia.Proceedings of the Advances in Positioning and Reference Frames.Rio de Janeiro,Brazil:International Association of Geodesy Symposia,1997:283-288.
[5] FOTOPOULOS G.Parameterization of carrier phase corrections based on a regional network of referencestations[C]∥The Institute of Navigation.Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 2000).Salt Lake City,Utah:The Institute of Navigation,Inc.,2000:1091-1102.
[6] WUBBENA G,BAGGE A,SEEBER G,et al.Reducing distance dependent errors for real-time precise DGPS applicationsby establishing reference station networks[C]∥The Institute of Navigation.Proceedings of the 9th International Technical Meeting of the Satellite Division of the Institute of Navigation(ION GPS 1996).Kansas City,Missouri:The Institute of Navigation,Inc.,1996:1845-1852.
[7] BLANCH J,WALTER T,ENGE P.Ionospheric estimation using extended Kriging for a low latitude SBAS[C]//The Institute of Navigation.Proceedings of the 17th International Technical Meeting of the Satellite Division 2004.San Diego,CA:The Institute of Navigation,2004:21-24.
[8] SPARKS L,BLANCH J,PANDYA N.Estimating ionosphere delay using Kriging:2.impact on satellite-based augmentation system availability[J].Radio Science,2011,46(RS0D22):1-10.
[9] SPARKS L,BLANCH J,PANDYA N.Estimating ionosphere delay using Kriging:1.methodology[J].Radio Science,2011,46(RS0D21):1-13.
[10]袁运斌,李子申,王宁波,等.基于拟合推估的中国区域电离层延迟精度建模方法[J].导航定位学报,2015,3(3):49-55.
Study of ionosphere interpolation method by using Klobuchar model as background field
QUAN Ranran1,HUANG Jingsong1,MENG Fanxiao2, WU Xiaomeng1
(1.School of Geodesy and Geomatics,Wuhan University/Collaborative Innovation Center for Geospatial Technology,Wuhan,Hubei 430079,China;2.State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan,Hubei 430079,China)
In order to improve the accuracy of ionospheric interpolation in the network RTK,the paper proposed a method of ionospheric interpolation by using background filed:Klobuchar model was used as background field when building the ionospheric model,combined with ionospheric data measured by the base station,and the linear interpolation model based on distance was utilized to determine the ionospheric information of the rover station finally.The method could improve the accuracy of ionosphere interpolation by using the spatio-temporal change information of ionosphere obtained from the background field.Experimental result showed that with the current typical base station distance,this method could improve the ionosphere interpolation precision by about 10%,at the meantime the network RTK rove location accuracy could be also increased about 10%.
network RTK;ionosphere delay;Klobuchar model;linear interpolation model based on distance
2016-05-03
权冉冉(1990—),女,山东滨州人,硕士研究生,研究方向为卫星导航与定位。
权冉冉,黄劲松,孟凡效,等.具有Klobuchar模型背景场的电离层插值方法研究[J].导航定位学报,2016,4(4):36-41,103 .(QUAN Ranran,HUANG Jingsong,MENG Fanxiao,et al.Study of ionosphere interpolation method by using Klobuchar model as background field[J].Journal of Navigation and Positioning,2016,4(4):36-41,103 .)
10.16547/j.cnki.10-1096.20160407.
P228
A
2095-4999(2016)04 -0036-07
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
雷达学报(2017年6期)2017-03-26 07:53:02
导航定位学报(2015年2期)2015-06-05 09:27:34
