
高层建筑开合屋顶TTC控制系统实现
2017-01-04 07:50:29郭西进王广胜孙晓燕
电气传动 2016年12期
郭西进,王广胜,孙晓燕
(中国矿业大学信息与电气工程学院,江苏 徐州 221008)
高层建筑开合屋顶TTC控制系统实现
郭西进,王广胜,孙晓燕
(中国矿业大学信息与电气工程学院,江苏 徐州 221008)
现代高层建筑开合屋顶,因其特殊的高空运行位置、高空风力影响,具有高风险性,控制系统需满足易操作、维护简单、美观性要求,但达到安全性要求将是最困难的。阐述了基于计算机监控、TTC控制器、CAN网络、伺服电机同步及变频调速技术的控制系统硬件与软件实现,该系统通过德国TUV安全性认证,且经1 a多的使用,充分证明了该系统的安全性、稳定性,达到了设计要求,实现了开合屋顶的自动控制,也为将来同类高层建筑开合屋顶提供了借鉴。
高层建筑开合屋顶,控制区域网络,伺服电机同步,变频调速
玻璃幕墙因其重量轻、强度大、美观、易生产等优点,在超高层建筑中获得了广泛使用[1]。但玻璃幕墙易受污染的缺点逐渐暴露,幕墙渐渐失去光泽,为保持建筑美观,需要定期维护清洗幕墙,这将带来新的难题。
以阿联酋中心市场为例,屋顶亦采用玻璃幕墙。常见建筑幕墙维护设备置于建筑顶部,而该建筑群均为倾斜式屋顶,维护设备若置于屋顶将暴露在外严重影响建筑美观性,且放置难度大。为解决该问题,建筑采用了2块方形开合屋顶,结构如图1所示。单个开合屋顶宽4.5 m,长8.2 m,活动部分重约7 t。
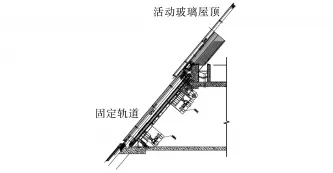
图1 开合屋顶结构示意图Fig.1 Structure schematic of retractable dome
建筑幕墙维护期间,控制系统将活动屋顶向外举出屋顶平面,接着向上平拉,屋顶将打开方形洞口,方便维护设备进出建筑,维护结束后,系统将按相反动作顺序关闭屋顶,恢复建筑外观,不影响建筑美观性。
1 开合屋顶动作安全性分析
活动屋顶为玻璃幕墙,运行过程中必须保持运行平稳,若发生形变或震动,将使玻璃破碎坠落地面,对地面行人造成重大伤亡的威胁。为此,系统举升采用4台伺服电机同步动作,拉动采用2台异步电机,PID速度控制方式。由于处于300 m以上高空,风力较大,增大了系统运行负载,容易出现过载状况,为此,系统配备风速传感器,输出模拟量至控制器,当风速小于10 m/s,系统负载处于承受范围内才可运行,当连续10 s风速大于10 m/s,系统自动停止运行并报警。
当开合屋顶处于平拉环节,由链条拉动屋顶行走机构向上运动,为防止链条断裂发生意外,需检测链条运动状况,并安装屋顶抱死装置。系统采用反射式激光传感器检测链条运行。正常运行时,单位时间内链条销轴通过传感器次数固定,控制器收到固定数量脉冲;意外发生时,脉冲数将发生变化,系统立即输出停止电机运行指令并启动抱死装置。抱死装置使用液压抱闸制动器,由三相异步电机驱动,配备压力传感器、闸口检测感应器。开闸时,启动电机,开启闸口,当液压油达到设定压力时停止电机,并通过闸口检测传感器确认闸口已完全打开,此时开合屋顶方可运行,若发生意外,则立即释放液压闸制动开合屋顶防止滑落。
2 开合屋顶TTC控制系统
将计算机和智能控制器等智能设备用于现代楼宇控制,实现楼宇的网络化智能控制,早已成为现代智能楼宇的发展方向。下面以中心市场为案例,从硬件与软件2方面,阐述开合屋顶智能控制。
案例建筑处于热带地区,夏季平均温度40℃,设备处于建筑顶部玻璃幕墙下,受阳光直射,控制柜表面温度超过50℃,常见控制器早已无法正常工作。因此,系统采用德国TTControl公司TTC系列200高速控制器,其最高工作温度达到85℃,自带2个CAN通讯接口,方便设备接入监控计算机,编程软件采用CoDeSys,支持IL,FBD,LD,ST,SFC,CFC 6种编程语言,编程方便。
2.1 控制系统整体硬件架构
楼宇总控室采用WinCC监控整栋楼宇,作为楼宇控制的一部分,系统接入WinCC开合屋顶界面,受总控室监控,总体架构如图2所示。

图2 系统硬件架构Fig.2 Hardware structure of the system
结合安全性与负载要求,系统以工控机作为控制顶层,同时控制2面开合屋顶,以TTC200控制器控制具体环节,举升环节采用4台5.5 kW伦茨伺服电机置于开合屋顶4个拐角,伺服电机使用伦茨8400TopLine驱动器驱动;平拉环节采用2台2.2 kW异步电机置于开合屋顶两侧,拉动链条,电机采用西门子MM440变频器驱动,额定功率3 kW。2台TTC200 CAN0口接入工控机,CAN1口通过CANopen协议控制4台伦茨8400TopLine驱动器。TTC200的RS-485接口外接RS-485转Profibus-DP模块,MM440亦选择Pofibus-DP选件板,使得控制器可使用Profibus协议控制变频器。
2.2 控制系统网络构成
2.2.1 顶层网络——CAN网络
监控室内放置1台工控机,运行WinCC程序,其部分界面与开合屋顶相关联,主要作用是操作员可直接控制2面屋顶的开关,观察屋顶运行状况、电机运行参数等。工控机PCI插槽拓展连接PCI-1680U CAN通信卡,实现与TTC200 CAN0口的CAN总线硬件连接,同时也作为TTC200的程序下载接口。因WinCC不含TTC200驱动程序,需采用OPC通讯方式,具体为ZOPC_Server服务器(基于CAN总线的OPC服务器),实现WinCC与TTC200的CAN连接。
2.2.2 异步电机控制网络——Profibus-DP网络
作为现代工业现场最具代表的通讯网络之一,PROFIBUS网络早已被广泛使用,本案中异步电机控制亦采用此方式。以TTC200做主站,2台MM440为从站,主站通过RS-485串口外接串口转Profibus-DP模块,9针连接从站Profibus-DP选件板SUB-D插座,实现主从间通讯网络建立。变频器的从站地址(参数P0918)正确配置,且2台地址必须唯一,主站采用PPO1型数据结构,只发送过程数据。
2.2.3 伺服电机网络——CAN网络
伺服驱动器采用了德国伦茨公司8400系列TopLine驱动器,其是8400系列中拥有最高级别功能和最佳驱动性能的驱动器,适合伺服电机定位控制方式,自带的CAN接口支持CANopen协议与TTC200 CAN1口连接,接收TTC200控制指令并返回运行参数。伺服通讯程序使用伦茨公司Engineer软件编写,下载到驱动器。
2.3 伺服同步控制
传统的伺服系统控制信号是以脉冲形式发出,通过脉冲当量的控制来实现电机的控制,此种控制方式易受干扰并发生脉冲丢失现象。随着对控制要求的提高,多轴、高精度系统所要求的控制系统与伺服驱动间的通信大大提高[2],传动的脉冲式数据传输已经很难满足要求。
本案采用新型的基于CAN总线的多轴伺服控制系统代替传统脉冲形式,如图3所示。采用主从控制方式[3],1台为主机,3台为从机,建立网络,主机接收TTC200控制信号,并负责整个网络的运行和管理。
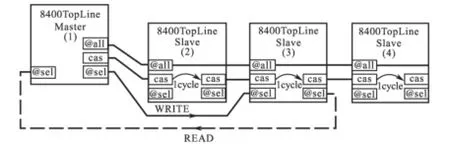
图3 伺服系统主从模式Fig.3 Servo system master-slave model
伦茨8400Topline是一款基于CANopen协议的全数字伺服驱动器,内置有CANopen通信对象字典,连接着CANopen设备的通讯接口和应用部分。
如表1和表2所示,CAN报文包括帧起始、仲裁字段、数据段、CRC校验以及帧结束几大部分。其中,数据段包含了CANopen数据服务报文(SDO)信息,SDO将8字节数据段分为请求码、对象和子对象索引以及4字节数据,从而进行对象字典数据的读写[4]。
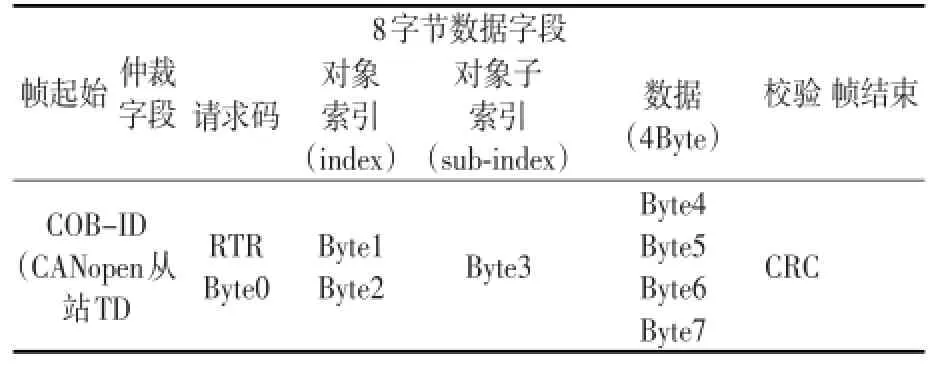
表1 请求帧(主站-数字伺服)Tab.1 Request frames(master-digital servo)

表2 响应帧(主站-数字伺服)Tab.2 Response frames(master-digital servo)
2.4 异步电机恒速控制
目前,基于异步电机动态数学模型,按转子磁链定向的矢量控制系统,可实现异步电机高动态性能调速[5]。矢量控制实现的重要方程式为
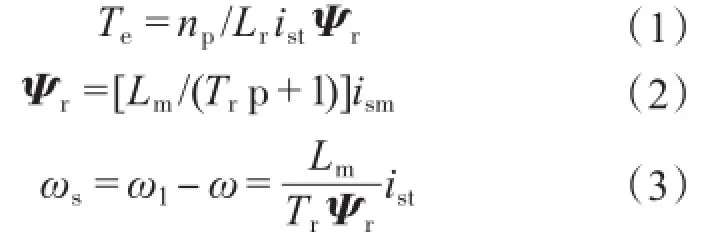
式中:Te为转子磁链定向坐标系中的电磁转矩;np为极对数;Lr为转子等效两相绕组的自感;ist为定子电流转矩分量;Ψr为转子磁链旋转矢量;Lm为定子与转子同轴等效绕组间的互感;p为微分算子;Tr为转子电磁时间常数;ism为定子电流励磁分量;ωs为转差角频率;ω1为旋转角频率;ω为输出角速度。
按照矢量控制系统基本方程,异步电机数学模型等效分解成ω和Ψr2个子系统,如图4所示,解耦成ism和ist2个分量,但是,由于Te同时受到ist和Ψr的影响,2个子系统仍旧耦合。因此,设置磁链调节器AΨR和转速调节器ASR分别控制Ψr和ω。当励磁分量ism为常值时,如果ist变化,转矩Te将立即随之成比例变化,没有任何滞后,得到满意的转矩控制特性。

图4 矢量控制系统原理结构图Fig.4 Vector control system principles structure chart
矢量变换控制的数学依据是坐标变换,坐标变换需要转子磁链方向角φ,其估算基本原理如下:

采用西门子MM440变频器,其内部集成有矢量控制方式,可以很好地满足电机控制,并且,应用其自带的PID控制功能,使电机迅速而准确地到达设定速度[6],省去了TTC200内部复杂的PID编程,只需简单设定变频器参数,经现场调试即可投入运行。实际速度检测使用安装于2条链条从动轮的宜科编码器EC58P,单圈4 000A/B差分脉冲。利用TTC200最高达10 kHz的高速计数端,将编码器脉冲输入TTC200,由TTC200计算转速后,从2路模拟量输出端输出相应的2~10 V电压信号接入MM440模拟量输入端,作为PID速度反馈,实现电机速度闭环控制。变频器MM440主要参数设定参见表3。
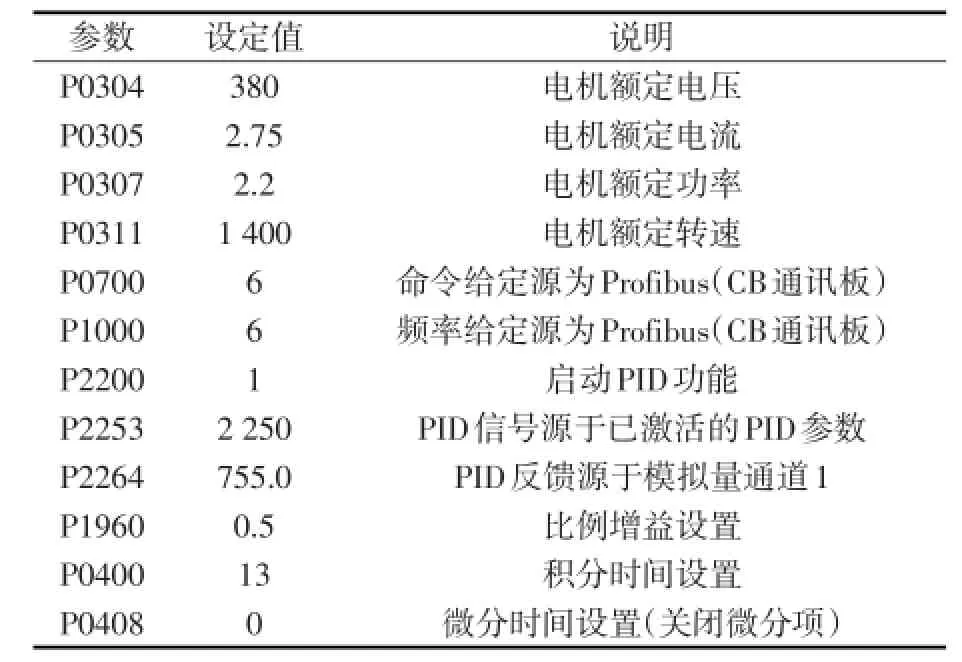
表3 变频器主要参数设定Tab.3 The main parameters settings for converter
2.5 控制系统软件
2.5.1 程序模块
系统分2种运行状态:开启屋顶、关闭屋顶,还包括有报警异常处理等。
1)初始化子程序:检测主电源,检测风速传感器模拟量信号,Profibus-DP通信初始化,CAN通信初始化,检测开合屋顶当前位置,输出准备就绪信号。
2)伺服控制子程序:判断伺服电机原点是否就绪,若未就绪,先驱动电机搜索原点,原点搜索完成后,启动定位模式,带动开合屋顶垂直运动。
3)液压抱闸制动器驱动子程序:进入开合屋顶拉动环节前,启动制动器电机,待液压油达到设定压力,停止电机并保持打开状态,闸口金属传感器反馈真实闸口状态。报警状况下,立即实施制动。
4)异步电机控制子程序:控制2台异步电机启动、停止,读取电机电流、电压和故障信息,读取编码器速度信息。
5)故障处理子程序:故障发生时,锁死启动程序,停止所有电机,启动液压制动器,启动报警指示灯与报警蜂鸣器。故障解除后,解锁启动程序,消除报警指示。
2.5.2 计算机监控界面
利用WinCC编写的监控界面如图5所示,实现开合屋顶实时监控。
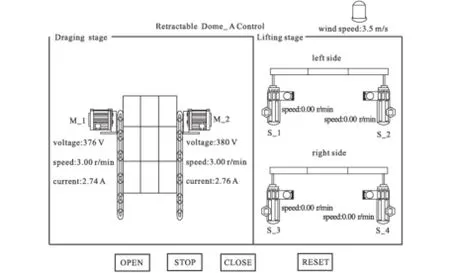
图5 计算机控制界面Fig.5 Computer control interface
3 结论
本文阐述了由WinCC为人机界面,TTC控制为核心,配合伺服同步控制、变频同步拖动的高层建筑开合屋顶自动控制系统,整个系统自动化程度较高,完全满足安全性要求。系统在阿联酋中心市场超高层建筑得以成功应用,通过了德国TUV安全性认证,单次运行时间约30 min,状况良好。在满足使用功能与易操作的同时,保证了建筑整体美观性,对于同类高层建筑设计具有极大借鉴意义。
[1]胡琳琳.幕墙与采光工程施工问答实例[M].北京:化学工业出版社,2012.
[2]Liu Huashan,Shi Jijun,Sun Peide.Developments and Recent Patents on Motion Control System[J].Recent Patents on Mechanical Engineering,2015,8(2):140-147.
[3]江小玲,舒志兵.基于CAN总线多轴伺服电机的同步控制[J].机床与液压,2012,40(8):140-142.
[4]韩江,黄涛,董伯麟,等.基于CANopen协议的数字伺服电机通信主站研究[J].轻工机械,2010,30(1):67-71.
[5]雷丹.运动控制系统[M].北京:人民邮电出版社,2013.
[6]李伟,王友权,董继先,等.自整定PID控制在卷取张力中的设计与仿真[J].包装工程,2014,35(11):67-70.
Control System Based on TTC of Retractable Dome in High-rise Buildings
GUO Xijing,WANG Guangsheng,SUN Xiaoyan
(School of Information and Electrical Engineering,China University of Mine&Technology,Xuzhou221008,Jiangsu,China)
As the influence of special high-altitude running position and the wind,the control system of retractable dome in modern high-rise buildings should meet the requirement of user-friendly,easy maintenance and aesthetic,and to meet the requirement of safety will be the most difficult problem.Elaborated the hardware and software of the control system,which was based on visible monitoring,TTC,CAN network,synchronous servo motors and frequency control technology.The system,with the safety certificate of TUV,had been used for more than 1 year,certainly demonstrated its safety and stability.And it has achieved the design requirement,realizing the automatic control of retractable dome,which can be referred to resemble design in the further.
retractable dome of high-rise buildings;control area network;synchronous servo motors;frequency control
TP273
A
10.19457/j.1001-2095.20161214
2015-11-14
修改稿日期:2016-06-10
国家自然科学基金项目(61473298)
郭西进(1962—),男,博士,教授,Email:xjguo@cumt.edu.cn
猜你喜欢
今日农业(2022年1期)2022-11-16 21:20:05
微特电机(2020年11期)2020-12-30 19:42:32
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
现代装饰(2020年6期)2020-06-22 08:44:12
儿童时代·幸福宝宝(2019年1期)2019-03-31 15:00:22
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
天津诗人(2017年2期)2017-11-29 01:24:14
工业设计(2016年6期)2016-04-17 06:42:53
