
直驱风力发电机通用模型仿真研究
2016-12-29 08:38毕红续李文迪方雯
电气开关 2016年3期
毕红续,李文迪,方雯
(三峡大学 电气与新能源学院,湖北 宜昌 443002)
直驱风力发电机通用模型仿真研究
毕红续,李文迪,方雯
(三峡大学 电气与新能源学院,湖北 宜昌 443002)
本文研究对象为永磁直驱风力发电机,提出直驱风力发电机通用模型。该通用模型包含通用风力机模型、同步发电机模型和直驱风力机传动模型。模型中风力发电机采用变桨距技术,通过改变叶尖速比实现在不同的风速下实现最大风速追踪,实现风能利用最大化。基于Matlab/Simulink平台建立模型,当输入为变化风速信号时,分析模型输出结果,发现结果符合风力发电机特性。由于在研究风力发电中,风力发电机模型必不可少,文中所建立的风力发电机模型简单可靠具有较强的通用性,具有较强实用性。
风力发电机;模型;最大风速追踪;通用模型
1 引言
随着电力需求的不断增长与环境压力的双重要求,可再生清洁能源的研究愈来愈热,由于风力发电具有良好的发展前景,开发利用风力资源对于缓解能源短缺、保护生态环境具有重要意义,因此受到世界各国的广泛关注,使得风电在全球范围内迅猛发展[1]。近10年来,全球风力发电累计装机容量稳步增长[2]。截至2013年,全球风力发电的累计装机总容量已达到3.18亿千瓦,排名前五位的国家依次为中国、美国、德国、西班牙、印度。
2012年我国风力发电的并网总电量达到了77000kW,连续两年位居全球第一,且年发电量总量超过1000亿千瓦时,占当年全国总发电量的2%,已经成为我国第三大主力电源,对于优化能源结构、促进节能减排有明显作用。目前我国风电发展面临前所未有的发展机遇与挑战。因此积极研究风力发电机仿真技术将,有助于加快我国风力发电的发展步伐,从而缩小与发达国家的技术差距[3]。通过仿真技术来研究风能发电机,已经成为满足电力需求和协调社会发展的重要措施。
本文从风力发电机组的运行机理入手,建立永磁直驱风力发电机模型及提出其控制策略。其中包括发电机,风力机以及传动部分。在MATLAB/Simulink中建模仿真运行,分析结果。验证了该模型及其控制策略的正确性和有效性。
2 风能及风力机特性
2.1 永磁直驱风力发电系统
风力机是低速旋转机械,一般旋转速度为每分钟几十转,而风力发电机要保证发出50Hz的交流电,如采用4级对数发电机,其同步转速为1500r/min,所以大型的风力发电机组要使的产生50Hz的交流电,要使风力机与交流发电机之间装有增速齿轮箱,提高发电机转速。
直驱式风力发电机是指不含有齿轮箱直接由风力驱动的发电机。直驱式发电机无齿轮箱虽然提高了发电机的设计成本,但能有效地提高系统的效率以及运行可靠性,能够降低噪声和机械损失,避免增速箱带来的诸多不便,从而使得风力发电机的运行维护成本降低,这种发电机在大型风电机组中占有一定比例。由于直驱式风力发电机在较低转速恒频运行,则发电机定子需通过变流器与电网连接。
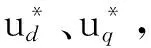
直驱式风力发电机组主要由风轮机、发电机、传动机构、机侧变流器和网侧变流器组成。永磁直驱风力发电机的结构示意图如图1所示。

图1 永磁直驱风力发电机的结构图
2.2 风力机模型
风力发电机是通过风轮将风轮转换为机械能,从而带动发电机发电。通过对风轮叶片的受力分析,可以了解风力机风力机如何吸收风能。基于风能动量理论,我们可以描述风轮所受的力与风流速之间的关系。通过Betz极限理论可知,风力发电机从自然界中索取的能量是有限的,但在理想情况下,风力机最多能吸收59.3%的风的动能。
一般通过风能利用系数Cp与叶减速比λ的非线性曲线来表示风力机的基本特性,其中叶尖速比可表示为:
(1)
将其简化为:
变桨距PMSG控制分为桨距角控制和网侧变流器控制。分别实现较大的风功率追踪与稳定并网的功能。
(2)
根据式(2),可画风轮利用系数随叶尖速比变化曲线如图2所示。
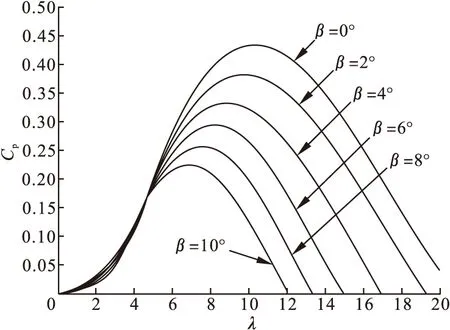
图2 风力机的性能曲线
3.2.3 网侧变流器控制策略
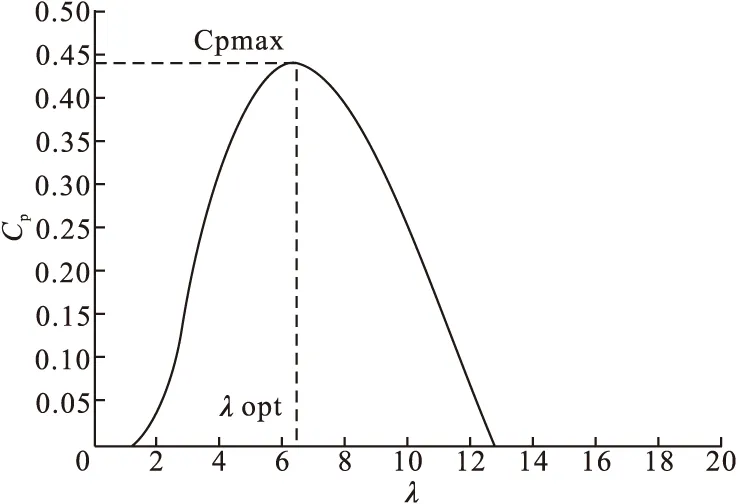
图3 风能利用功率最大功率点图
在风速给定的情况下,风能利用率决定了叶轮所获得的功率。风力机所获得的功率可表示为。
(3)
式中:Pm是风轮输出机械功率,单位kW;Tm是风轮输出机械转矩,单位为Nm;Cp是风能利用系数;CT为风轮的转矩系数;β是叶片桨距角,单位为°;λ为叶尖速比;A是风轮扫掠的截面积,单位m2;ρ表示空气密度,单位为kg/m3。
3 永磁直驱风力机模型与控制策略
3.1 永磁同步电机模型
永磁直驱风力机发电机部分在dq旋转坐标系下的数学模型为:
(4)
式中:id和iq分别为发电机的d轴和q轴电流;Ld和Lq分别为发电机的d轴和q轴电感;Ra为定子电阻;ωe为电角频率,ωe=npωg;np为发电机转子的极对数;λ0为永磁体的磁链;ud和uq分别为ug的d轴和q轴分量。
定义d轴的反电势ed=0,q轴的反电势eq=ωeλ0,假设发电机d轴和q轴电感Ld=Lq=L,则式(4)可写为:
(5)
电磁转矩表达式为:
Te=1.5np[(Ld-Lq)idiq+iqλ0]
(6)
式中,R为风轮半径,单位为m;v为主导风速,单位为m/s;ωr为风轮角速度,单位为rad/s。
Te=1.5npiqλ0
传统理论认为法律趋同有两种方式:一种是被动地接受其他国家的法律,又称移植,对应上文法律的强行趋同;另一种是主动地接受其他国家的法律,又称继受,对应上文法律的自发趋同。该理论同时主张,不论是移植还是继受,都是经济落后国家对经济发达国家法律制度的趋同。并且,不同法律体系的移植和继受都从法律制度的改变开始,该制度可以脱离一国的法律文化而产生,但要使制度有稳定性和适应性则需要由该法律制度所表征的法律文化与本土原先的法律文化消解冲突并相互融合,最终才能在新产生的法律文化上彰显制度的生命力。[注]参见米健:《当今与未来世界法律体系》,第14-19页。
(7)
由上公式得到传动系统模型与发电机模型,分别如图4、5所示。

图4 传动系统模型
3.2 PMSG的控制策略
3.2.1 控制目标
假设在不计功率损耗的情况下,风力机的风轮捕获的总的能量为Em可分为发电机输出的电能EM、和调节桨距所用的能量EP、发电机转子获得的能量EE之和如下式所示:
Cp为风轮从风能中吸收功率的能力,它是桨距角β及叶尖速比λ的高阶非线性函数,理论计算函数如下:
3.2.2 桨距角控制
传统工程测绘极易受到地形条件及障碍物的影响,造成测绘数据出现误差,无法满足后期施工要求。但GPS测绘技术主要采用接受及分析卫星信号的方式实现测量,不必受到天气、温度等影响,只要满足观测条件,就可实现全天候的连续观测,大大提升了工程测量工作效率。
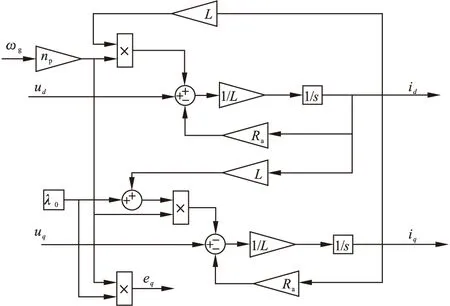
图5 同步发电机模型
ΔEm=ΔEE+ΔEP+ΔEM
(8)
当风速超过额定风速时,风速增加,风力机Em增加,若风力机组不采用变桨距控制,要使得等式成立,且发电机输出的功率仍然维持不变,那么只能使EE增加,由于发电机的转速变大,它的输出有功也必然会增大,相互矛盾,使得风速增大的时候能量无法守恒,若此时增加桨距角控制系统,当风速超过额定值时,调节桨距角,如果调节桨距角的能量EP等于转子增加的动能,就可使得能量守恒。相反,风速低于额定风速时,风速减小,风力机Em减少,若反向调节叶片的桨距角,仍可使能量保持守恒。
则β0为初始桨距角,Δβ为桨距角实际调节变化量,Δβ*为桨距角变化参考值,τ为惯性时间常数,他们的关系式为:
辣椒为了后代种子能够继续繁衍,身体里多余的水分优先供给果实的生长,在极度干旱的情况下,宁愿牺牲自己(叶与茎)也要保全果实。多么神奇的生命之力。
(8)
拉普拉斯变换后可变为:
合川是畜牧业生产大区(县),生猪养殖是合川农业经济支柱产业之一,是农民增收的重要来源,是合川区畜牧业的骨干产业,同时是重庆市最大的生猪主产区,是重庆市百万头优质瘦肉猪产业化工程项目基地重点区(县)、无公害生猪生产基地区(县)和国家级PIC猪农业标准化示范区(县),生猪规模养殖场、生猪出栏量、生猪外调量等均居重庆各区县第一位。
(9)
因此输出的桨距角角度为:
β=β0+Δβ
(10)
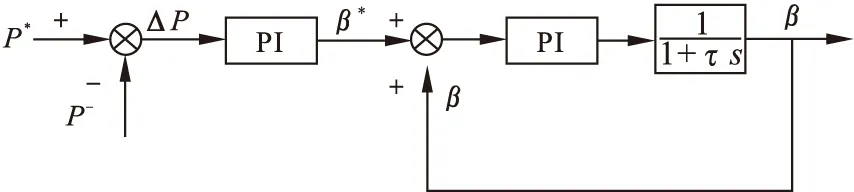
图6 桨距角控制器
由图可知,当叶片桨距角β一定时,风力机的输出功率有且仅有一个特定叶尖速比λ对应于最大风能利用效率,此时的λ值即为最优叶尖速比λopt,如图3所示。
结果表明,这种先经过蒸汽低温烹饪,再高温烧烤的方法,是将蒸汽低温和烧烤完美结合,利用低温烹饪可以减少蒸煮损失,保留食物的原味和色泽,食物口感嫩滑,但还没有烧烤的效果;此时,再经过高温烧烤,瞬间锁住水分,表面快速上色,就可以达到外焦里嫩的烧烤效果。
直驱风力发电机常用的变流器由两部分组成,一部分为转子侧整流器,另一部分为网侧变流器。由于自然风的风速不断变化,使得直驱式风力发电机发出交流电的频率是不断变化的,因此应首先将频率变化的交流电通过三相桥式整流变换成直流电,然后再将该直流电通过三相逆变器转换为50Hz的交流电才能并入电网。
直流电机由于结构简单、调速性能好,在工业、航空航天等领域得到了日益广泛的应用。[1]模糊PID控制技术结合了PID控制技术和模糊控制技术两者的优点,可以实时调整PID的控制参数,具有很好的鲁棒性,应用于直流电机调速系统可以得到满意的控制效果。[2]
一是防汛能力有新提升。加强防汛基础设施建设,大定海、龙华机场、新宛平等排水系统以及中心城区积水改善工程、区域排涝泵闸、“一江一河”防汛墙薄弱段整治、海塘岁修和保滩等工程建设进展顺利,成功抵御了多次暴雨袭击。特别是在10月7—8日受台风“菲特”影响,出现上海防汛史上首次“四碰头”的严峻局面后,全市上下共同努力,成功抵御了台风、暴雨、天文大潮、上游洪水的侵袭,把灾害损失降到了最低,确保了城市正常运行和人民群众生命财产安全。
网侧变流器的控制目标是保持风力发电机发出稳定并能并入大电网的电能。目前,网侧变流器的控制策略多为在dq旋转坐标系下的直接电流矢量控制,经过电网电压矢量定向后,利用d轴有功电流id调节母线电压idc,利用q轴无功电流iq调节输出无功功率,通过增加负载电流前馈控制环节加快指令调节速率。具体如下:
可以适当增加猪只的饲养密度,利用猪体自身的散热来取暖,例如可放15头猪的圈舍,可增加到20头,等饲养4周后,再把生长缓慢的5头仔猪调出重新组圈。
网侧PWM变流器dq坐标系中的模型:
(11)
(12)
则式(11)为:
当前高中学校教学资源较为丰富,因此,为提高高中物理演示实验教学的有效性,教师应充分利用现有资源,做好实验教学方法的创新,不断丰富实验教学形式,给学生新鲜感,更好的吸引学生注意力,激发其积极思考的热情.一方面,为使学生更加直观的观察、理解实验现象,教师可采用多媒体制作相关的课件,对演示实验相关环节的补充.同时,实验过程中,应多与学生进行互动,帮助学生理解实验重点知识.另一方面,教师可引导学生做好演示实验内容的预习,鼓励学生参与到演示实验中.在课堂上,教师可要求学生充当“教师”角色进行演示,教师则做好指导.
(13)
大黑猫最近也总爱把眼睛眯成一条缝,它不再怔怔地望着对面的寓所发呆,我看到它常痴迷陶醉地盯着李小树旁边的那处小洋楼。我猜想可能是那只通体雪白的波斯猫在紫藤架上上蹿下跳的原因,又或者是新搬进小洋楼里的那个女人引起了它的注意。

(14)
(15)
则式(12)可写成
(16)
为了简化使控制算法,通常使用基于电网电压定向的方法,取d轴的方向为电网电压方向,则有下式成立:
(17)
将上式代入式(15)则有:
(18)

图7 网侧变流器控制结构图
3.2.4 PMSG控制系统总框图
在风力发电系统运行过程中,风轮处的风速大小决定了PMSG的输出功率,通过改变桨距角可以使得风力机运行在风速功率风力机功率曲线的最高点。
当定桨距角时,发电机的转速值在确定的风力机功率曲线中都有对应的功率匹配点。此时,控制转速意味着控制风力发电机的有功输出,可见转速的控制性能对于风力发电系统来说有着关键性的作用。其控制系统框图如下:

图8 PMSG控制系统框图
4 仿真系统结果分析
根据上述模型得PMSG风力发电机仿真模型如图9所示。
1.2.2.1 成立专门病房环境管理小组,护理管理者定期对小组成员进行培训,宣贯“整理、整顿、清扫、清洁、素养、安全”的6s管理理念。6S管理的理念是提高效率,保证质量,使工作环境整洁有序,预防为主,保证安全。每位护士都是成员,明确自身职责,落实6s管理。执行6S的好处 :学习6S精益管理中在于学神,不在于形 。6s精益管理的精髓是:人的规范化及地、物的明朗化。通过改变人的思考方式和行动品质,强化规范和流程运作,进而提高科室的管理水准,从而达到 人--规范化 ,事--流程化,物--规格化。
暑尽七夕夜渐凉,金风玉露好时光。8月18日,由山东金沂蒙生态肥业有限公司(以下简称“金沂蒙”)主办的金沂蒙土壤改良接地工程研讨会在徐州沛县顺利召开。来自沛县人民政府、中国农科院、中国农业大学的领导、专家及经销商代表,共100余人与会。
仿真使用的PMSG系统参数如下:额定功率为3.3kW,定子相电压幅值为220V,额定转速为6.4rad/s,定子电阻Rs=0.35Ω,转子磁链为0.5Wb,定子漏感为6mH,转动惯量为0.06kg·m2,电机极对数为8。风力机的参数为:风轮半径为1.5m,空气密度1.225kg/m3。
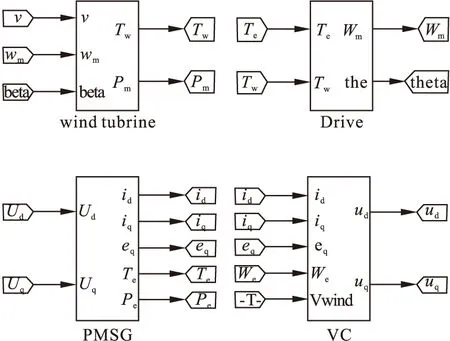
图9 PMSG风力发电系统整体仿真结构图
仿真在风速发生突变时,即当风速为10m/s突然上升到13m/s时,该模型运行仿真结果如下所示。
单胺类氧化酶可催化单胺类神经递质的氧化,从而使它们失活,以及最后被降解。因此单胺类氧化酶抑制剂可以提高大脑中单胺类神经递质的水平,该生理效果被认为是该类药物抗抑郁效果的疗效基础,三环类药物的神经系统活性较为广泛,包括但不限于提高突触间单胺类神经递质的水平。结合后续的一些神经科学研究,科学家们提出了单胺类假说:神经突触间单胺类神经递质—5-羟色胺或去甲肾上腺素的缺乏降导致了抑郁症的发生。

图10 电机输出功率

图11 叶尖速比与Cp

图12 桨距角变化

图13 定子d轴电流

图14 定子q轴电流
图15 定子三相电流波形
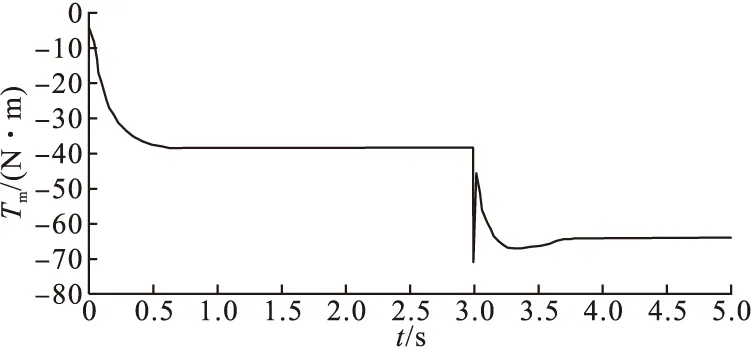
图16 风力机输出转矩
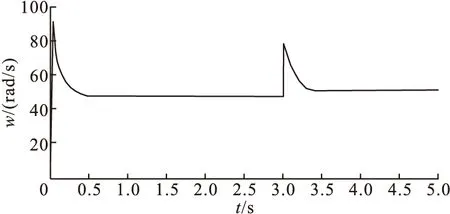
图17 机械转速变化
根据仿真结果,在风速10m/s突变为13m/s时,PMSG发电系统的桨距角增大,风力机输出转矩增大,风力发电机发出并入电网的电流增大,并且频率与电网一致。在调节过程中,变桨距控制系统顺利动作,以保证风能最大吸收,当风速变化之后稳定,系统各项运行参数又重新保持稳态运行。由风速突变时的仿真结果正确可以推断,若是风速一直在不断变化,该模型的结果同样真确合理。
5 结论
本文研究了直驱式风力发电系统,从风力发电理论一步步研究,建立了永磁直驱风力发电机的通用模型。将所建立的模型通过仿真,结果验证了本文所提出的模型及其控制策略的正确性及系统的可靠性。
本文通过建立模型,结合仿真结果得到的一些正确结论,为研究风力发电系统仿真模型提供好的方向。但是由于风电系统本身的结构非常复杂,其中涉及到的参数很多,因此技术要求很高,还存在一些不足之处需要进一步来完善。本文中所建立的永磁直驱风力发电机的模型简单,控制策略容易实现,可作为风力发电机模型参考,为风力发电后续研究奠定基础。
[1] 郑芙华,黄邦根.全球能源危机条件下的中国经济可持续发展研究[J].北方经济,2008(19):38-39.
[2] 中国可再生能源发展战略研究丛书风能卷[M].北京:中国电力出版社,2008:9-12
[3] 尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略[J].电网技术,2007,15:61-65.
[4] 钟沁宏,阮毅,赵梅花,等.变步长爬山法在双馈风力发电系统最大风能跟踪控制中的应用[J].电力系统保护与控制,2013,41(9):67-72.
[5] 陈端航,李少纲,金昌锦.直驱风电系统及电机控制的研究[J].电气开关,2015(3):81-83.
[6] 张明锐,陈洁,王之馨,等.一种新型的永磁同步风力发电机并网系统[J].电力系统保护与控制,2013,41(14):141-148.
[7] 叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002:130-142.
[8] 蒋家强,曹建福.永磁同步电机矢量控制及其仿真研究[J].电气开关,2011(4):51-53.
[9] 郭鹏.模糊前馈与模糊PID结合的风力发电机组变桨距控制[J].中国电机工程学报,2010,30(8):123-128.
[10] 陈益广,王志强,沈勇环.直驱式方波永磁同步风力发电机控制系统仿真[J].系统仿真学报,2009,21(18):5849-5853.
[11] 高剑.直驱永磁风力发电机设计关键技术及应用研究[D].湖南大学,2013
[12] Conroy J F,Watson R.Low-voltage ride-through of a full converterwind turbine with permanent magnet generator[J].IET RenewablePower Generation,2007,1(3):182-189.
[13] Monica C,Santiago A,Juan C B.Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid,IEEE Transactions on Energy Conversion,2006.
[14] 李荣华,王桂华.基于dq坐标的三相VSR建模与解耦分析[J].电气开关,2009(3):23-25.
[15] Ying-Yi Hong,Shiue-Der Lu,Ching-Sheng Chiou,MPPT for PM wind generate or using gradient approximation.Energy Conversion and Management.2009
[16] 周天佑,郭育华.双馈风力发电系统网侧变流器的控制及仿真[J].电气开关,2010(2):31-34.
Modeling and Simulation of Directly Driven Wind Turbine
BIHong-xu,LIWen-di,FANGWen
(College of Electrical Engineering & Renewable Energy,Three Gorges University,Yichang 443002,China)
Choosing permanent magnet directly driven wind turbines for the studying.Acomplete model ofPMSG has been built,which includes windturbine model,drive train model and generator model as well.Inaccordance with the variation of wind speed,strategies for pitchangle control and rotational speed control are developed.By pitch angle control and the grid-side converter control to achieve maximum wind speed at different Winds to maximize wind energy utilization.Simulation for the case of wind speed steppingchange by Matlab / Simulink verifies the validity of the model and the feasibility of thecontrol strategies.Due to research of wind power,wind generator model is essential.Wind turbine model which is established in this paper is simple and reliable.
wind-driven generator;model;max.wind speed trailing;general model
1004-289X(2016)03-0088-06
TM61
B
2015-09-14作者简介:毕红续(1992-),男,硕士研究生,新能源发电、微电网技术等方面的研究。
猜你喜欢
动力工程学报(2022年10期)2022-10-19
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
东方汽轮机(2020年3期)2020-11-04
太阳能(2019年10期)2019-10-29
中医眼耳鼻喉杂志(2019年2期)2019-04-13
太阳能(2019年1期)2019-02-14
风能(2016年9期)2016-12-21
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
