
一种大角度大负载展收机构设计与优化
2016-12-24 06:53于春宇许怡贤林秋红
载人航天 2016年6期
于春宇,许怡贤,李 林,林秋红
(北京空间飞行器总体设计部,北京100094)
一种大角度大负载展收机构设计与优化
于春宇,许怡贤,李 林,林秋红
(北京空间飞行器总体设计部,北京100094)
针对为实现交会对接系统可重复使用而产生的可展收防热装置设计需求,提出了一种双四连杆串联式防热罩展收机构,建立了ADAMS仿真模型,以大传动角、避免杆间重叠干涉以及展开位置死点自锁为约束条件,对展收机构的铰点位置和连杆长度等参数进行了优化设计,实现了四杆机构在死点位置时防热罩展开180°的几何特性,具有断电保持能力。通过对大惯量负载的驱动力分析,确定了最小驱动力矩(64.6 N·m)。可实现大角度、大负载重复展收。
大角度;展开机构;优化设计;ADAMS
1 引言
随着航天技术的飞速发展,可重复使用载人航天器已成为世界航天领域的重要发展方向。公开资料显示,国外已基本掌握了整器的可回收、重复使用技术[1⁃2],但作为载人飞船关键组成部分的交会对接系统,仍未见公开报道其可实现重复使用。如果交会对接系统无防热保护,返回时交会对接系统将会烧蚀,为了实现载人飞船交会对接系统的重复使用,需要设计一种可展收的防热装置,交会对接时展开,发射和返回时收拢。1999年发射的星尘号和2001年发射的起源号返回器实现过相似任务[3⁃4],但其负载小,展收角度小,与载人飞船需求相差较大。
本文设计了一种双四连杆串联式展收机构,可实现大角度、大负载的重复展收动作,并对杆长和布局等参数进行了优化设计。
2 设计方案
2.1 方案设计
展收机构的组成如图1和图2所示,采用双四连杆串联机构,其中杆1、杆2、杆3和机架组成一套四连杆机构(称为下四连杆机构),杆3、杆4、防热罩和机架组成另一套四连杆(称为上四连杆机构),两套四连杆机构共用杆3,杆3即为下四连杆机构的摇杆又为上四连杆机构的曲柄。杆1与驱动组件相连,驱动组件转动带动连杆机构运动实现防热罩展收动作,杆3的特殊构型可避免空间干涉。
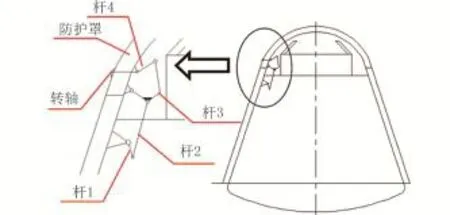
图1 展收机构示意图(收拢状态)Fig.1 Schematic diagram of the deployable mecha⁃nism(Stowed state)
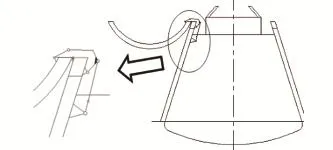
图2 展收机构示意图(展开状态)Fig.2 Schematic diagram of the deployable mecha⁃nism(deployed state)
2.2 原理说明
该双四连杆串联机构的机构原理如图3所示,其自由度为1,仅需要一套驱动组件。展收机构运动时,驱动组件通过拨叉带动杆1转动,杆1转角经过连杆机构后放大,实现大角度展收动作,当杆1与杆2成直线时,防热罩展开180°,此时“下四杆机构”处于死点位置,提供较好的支撑刚度,具有断电保持能力。杆4设计为异型杆件,其特殊构型可避免展收过程中发生碰撞干涉。
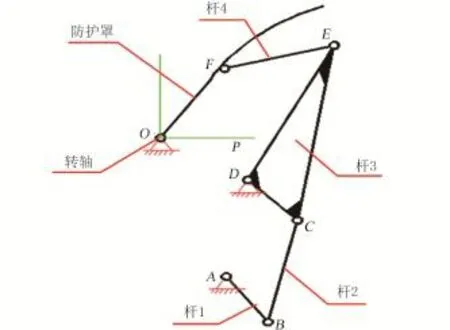
图3 机构运动简图Fig.3 Principle diagram of the deployable mechanism
3 优化设计
3.1 确定设计变量及参数化建模
本文采用ADAMS软件对展收机构进行优化设计。为了统一设计变量,采用初始位置铰点的横、纵坐标作为设计变量。如图3所示,以O点为原点建立坐标系,给出A、B、C、D、E、F 6个点的横坐标和纵坐标,根据空间约束确定12个变量的初始值及其变化范围,如表1所示。根据防热罩展开到180°时需要具有断电保持能力的功能要求,通过设计连杆机构处于死点位置以满足要求。在防热罩展开达到180°时,杆AB与杆BC成直线。在ADAMS中所建立的参数化模型如图4所示。
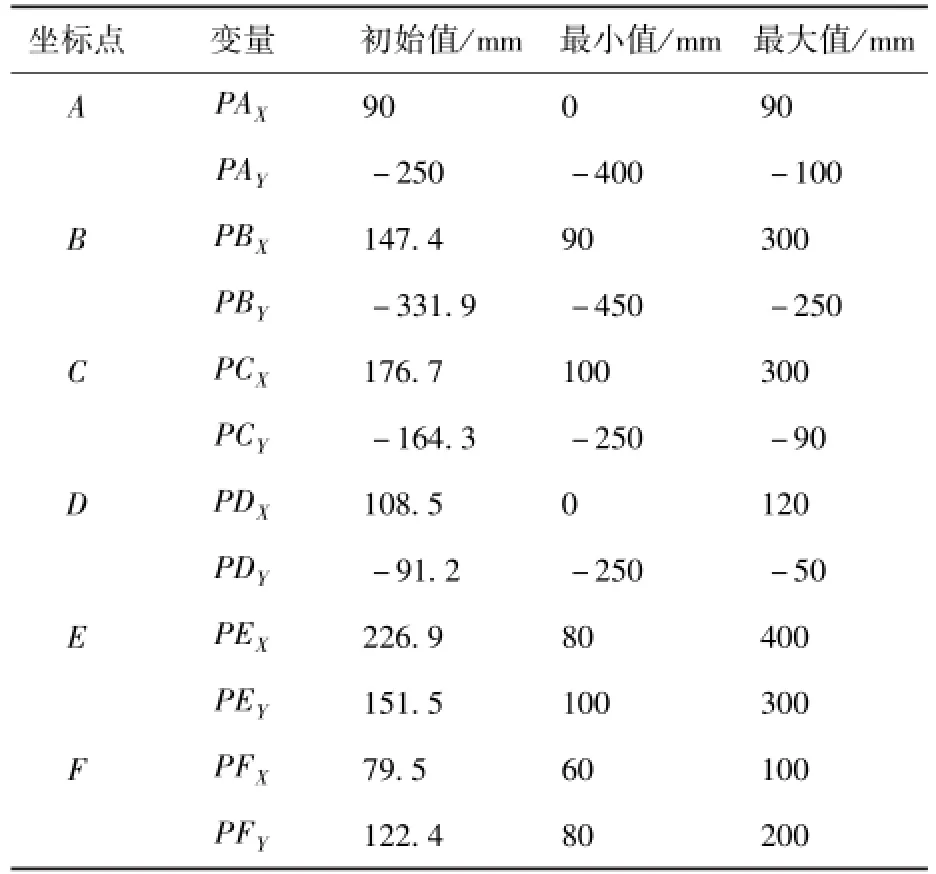
表1 设计变量及其变化范围Table 1 The range of variable parameters
3.2 确定约束条件
当机构运转时,其传动角的大小是变化的,为了保证机构传动良好,设计时通常应使传动角大于30°,由此可确定约束条件如式(1)~(2):

在平面多连杆机构传动中,应尽量避免连杆与连杆之间交叉运动,以避免连杆实体间干涉,同时还要考虑连杆与机架的干涉,根据连杆机构间的几何关系确定,确定约束条件如式(3)~(6):
下四连杆机构ABCD的约束:

上四连杆机构DEFO的约束:

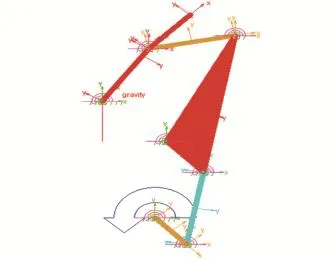
图4 ADAMS仿真模型Fig.4 Simulation model in ADAMS
3.3 拟定目标函数
根据展收机构的优化设计要求,在∠ABC等于180°,即达到死点位置时,防热罩OF展开了180°,因此,优化目标是防热罩展开角度减去180°的绝对值最小。目标函数定义如式(7):

3.4 优化与仿真
本文采用OPTDES⁃SQP算法来进行优化,在模型上添加传感器以进行限位,并建立测量函数,实时监测优化过程中主要参数变化情况[5⁃8],目标函数的优化结果如图5所示。
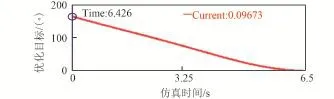
图5 目标函数优化结果Fig.5 Optimized result of the objective fuction
从图5可看出,优化后目标函数值达到0.096 73,这说明在达到死点位置时,防热罩从起始位置正好转过了180°,满足优化的目标。从图6、图7可以看出防热罩从起始位置展开到最大角度时,两套四连杆机构传动角的变化范围分别是:33°~90°、50°~90°,均满足了给定的约束条件。
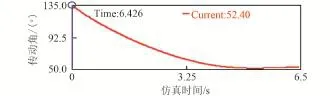
图6 上四连杆机构传动角曲线Fig.6 Transmission angle curve of the up⁃four⁃link
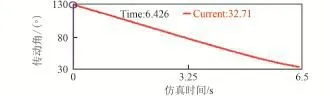
图7 下四连杆机构传动角曲线Fig.7 Transmission angle curve of the down⁃four⁃link
优化前后各杆件长度的对比如表2所示。
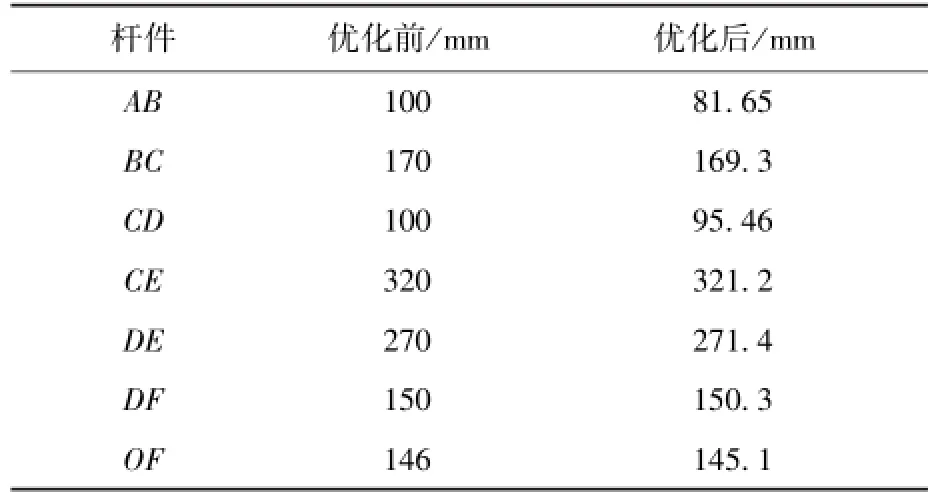
表2 优化前后各杆件的长度Table 2 The link length before and after potimization
3.5 驱动力矩计算
展收机构阻力主要包括防热罩的惯性阻力矩和轴系阻力矩。
防热罩为质量均布的球形结构,对转轴的转动惯量通过Pro/E三维建模获得,Ixx=6.3 kg·m2,Iyy=4.0 kg·m2,Izz=4.0 kg·m2。铰链处摩擦系数为:动摩擦0.1,静摩擦0.2。在ADAMS中,驱动电机以1.9°/s的角速度匀速旋转,转动60 s后防热罩刚好转动了180°,转动周期60 s内驱动力矩的仿真结果如图8所示。从曲线可以得到驱动机构扭矩(含减速器)最大值是32.3 N·m,航天器设计中一般要求驱动力矩裕度不小于1,所以电机的输出扭矩应不小于64.6 N·m。
Design and Optimization of a Big Angle and High Load Deployable Mechanism
YU Chunyu,XU Yixian,LI Lin,LIN Qiuhong
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Rendezvous and Docking(RVD)is one of the most important functions of the new-genera⁃tion manned spacecraft.In order to realize repeated use of the RVD equipment,a deployable thermal protection mechanism is needed.A new type of deployable thermal protection mechanism with tandem double⁃four⁃links was presented in this paper.The simulation model based on ADAMS software was es⁃tablished.Big transmission angle,no overlapping interference between the rods and self⁃locking at the dead point position were set as the constraint conditions to optimize the geometric parameters of the link bars.The thermal protection hatch could deploy to 180°at the“dead point”position of the links and with the torque keeping function.The minimum drive torque(64.6 N·m)was determined by large iner⁃tia load analysis.The large angle and large load deployment and stowage was realized
big angle;deployable mechanism;optimization;ADAMS
V19
A
1674⁃5825(2016)06⁃0755⁃03
2016⁃10⁃20;
2016⁃11⁃16
国家重大科技专项工程(2012AA7060802)
于春宇(1983-),男,硕士,高工,研究方向为航天器机构设计。E⁃mail:ycy5158@163.com
猜你喜欢
汽车实用技术(2017年16期)2017-09-21
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年9期)2016-07-12
中国市场(2016年12期)2016-05-17
创业家(2015年1期)2015-02-27
汽车实用技术(2014年9期)2014-02-20
汽车与新动力(2012年5期)2012-03-25
