基于车辆轨迹大数据的道路网更新方法研究
2016-12-22 04:19艾廷华
计算机研究与发展 2016年12期
杨 伟 艾廷华
(武汉大学资源与环境科学学院 武汉 430079)(ywgismap@whu.edu.cn)
基于车辆轨迹大数据的道路网更新方法研究
杨 伟 艾廷华
(武汉大学资源与环境科学学院 武汉 430079)(ywgismap@whu.edu.cn)
众源轨迹的泛在、实时特性,使其成为道路信息快速获取与更新的重要途径.针对矢量道路数据的变化检测与更新问题,提出了一种基于车辆轨迹大数据的道路网快速变化发现与更新方法.1)以道路弧段为基本单元构建缓冲区,根据道路变化信息类型及表现形式,运用轨迹运动几何信息(方向、转角)与交通语义信息(速度、流量),对道路变化信息进行检测、分类,确定道路变化类型;2)将道路变化类型推断与增量信息提取相结合,分别运用Delaunay三角网、交通流时间序列分析提取增量信息;3)根据变化类型进行增量信息融合.运用深圳市出租车GPS轨迹数据进行实验分析,结果表明:该方法相比常规方法能正确判断道路变化类型、区分真实变化与语义变化,增量信息精度提高约18%,且适于图层级的批处理快速更新.
轨迹大数据;变化检测;道路网更新;众源;交通语义信息
随着城乡道路建设的飞速发展,道路变化日新月异,导致道路数据更新滞后、现势性差、完整性与精确性低.传统的道路更新技术如专业测量[1]、地图综合缩编更新[2]、遥感影像解译[3]等成本高、更新周期长、工序复杂.当前泛在、海量、高时空分辨率的众源轨迹数据[4]中蕴含了丰富的道路交通信息,能实时感知道路的物理、语义变化.众源轨迹数据以其低成本、高现势性的优点,成为道路信息获取与检测更新的重要技术手段.
目前,轨迹大数据已成为数据挖掘[5]、位置服务(location based service, LBS)[6-7]、地理空间数据提取与更新[8-9]等领域研究的焦点,其中利用众源轨迹更新道路数据已取得了诸多成果.数据内容上包括道路几何数据与属性数据更新,如文献[10-12]根据轨迹数据与道路匹配的结果,提取新增道路并更新几何数据.文献[13]从车辆轨迹中提取了包括车道、车速等8类属性信息更新丰富OSM(open street map)[4]道路数据.从内容上看,当前研究集中于新增类型的几何数据更新,没有运用轨迹数据的几何、语义信息对道路变化类型进行推断识别,无法区分道路的物理、语义变化,导致更新操作错误,且数据更改频繁,降低数据质量.同时,对于道路其他变化类型(改道、方向上的变化等)及属性数据更新研究较少.技术方法上主要采用地图匹配技术,如文献[14-15]采用地图匹配技术进行道路变化检测,运用B样条拟合、图像形态学等方法提取新增道路,完成增量更新.文献[16-18]基于手机移动终端与Web网络端进行实时GPS(global positioning system)轨迹数据接收、匹配更新.文献[19-20]利用历史轨迹数据离线更新道路数据库.从技术方法上看,地图匹配技术适于高精度轨迹,对于采样稀疏、高噪音的VGI (volunteer geographic information)[4]轨迹数据具有局限性且效率较低.另外,传统方法从VGI轨迹数据中提取的道路增量信息精度不高.数据类型上包括高精度轨迹数据、OSM道路数据、测绘数据等,如文献[21-22]运用车辆轨迹对测绘数据、OSM电子地图数据进行更新与错误改正.文献[23]运用OSM道路数据采用渐进式缓冲区的方法更新专业测绘数据.文献[24-25]运用多版本数据库对道路数据库、导航电子地图进行增量更新.文献[26]利用高精度步行轨迹更新人行基础道路数据库.从数据源上看,测绘数据成本高、更新周期长,难以满足应用需求;OSM数据由于数据质量问题制约其工程应用;轨迹数据以其低廉、实时特性成为道路更新的重要途径.但当前研究主要针对高精度轨迹(采样间隔1~5 s),对于采样稀疏的VGI轨迹数据更新道路网研究较少.
综上,当前运用轨迹数据对道路网进行变化检测与更新仍存在2个问题:1)没有运用轨迹数据中的几何、语义信息对道路变化类型进行推断识别,难以区分真实物理变化与语义变化,导致更新操作错误;2)常规的变化检测与增量信息提取技术多适于高精度轨迹数据,对于稀疏采样、高噪音的VGI数据则算法复杂、精度低且效率不高.针对上述问题,本研究重点为:1)在分析道路变化类型及表现形式的基础上,运用轨迹几何信息、交通语义信息对道路变化信息进行检测、分类,确定道路变化类型;2)以道路弧段缓冲区为单元,将道路变化类型推断与增量信息提取相结合,建立适于车辆轨迹大数据的道路变化信息检测与更新技术方法.
1 道路变化信息分析
运用众源轨迹数据更新道路,需要分析轨迹数据中蕴含了哪些道路变化信息、道路变化类型、变化原因及其产生的效应,为变化检测与更新决策提供依据.
1) 轨迹数据对道路变化信息的表达.众源轨迹数据蕴含了丰富的道路交通信息[7-10]如交通流量、车道、转向、限速等,直接反映了道路网络的动态变化.其中轨迹运动几何信息(方向、转向)反映了道路网的几何变化,尤其是道路局部微观变化(不同行车方向、局部区域).时间序列的交通流语义信息(速度、流量)表征了交通运动状态与时空变化模式,并能区别道路的真实变化与交通语义变化.本文运用轨迹数据中的几何特征、交通语义信息,检测不同道路变化类型、提取道路变化实体,重点关注不同方向、道路局部变化情形.

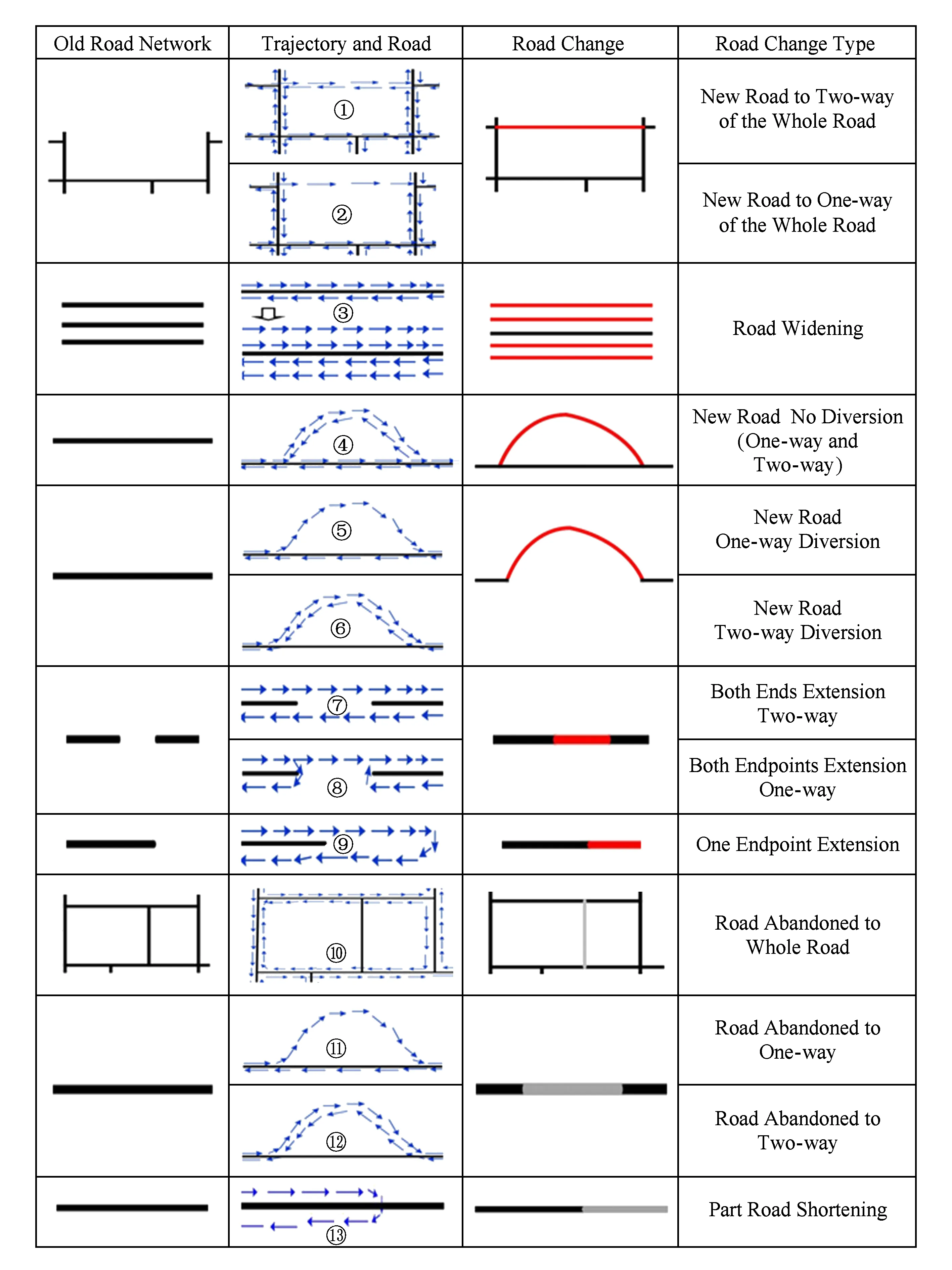
Fig. 1 The classification of the change information of road.图1 道路变化信息类型分类

4) 变化更新策略.根据道路变化类型,确定不同更新策略,主要包括增加、删除、延长、合并、属性表信息更新等操作.

Fig. 2 The method of change detection and updating of road using crowdsourcing trajectory data.图2 基于众源轨迹数据的道路变化检测与更新方法
众源轨迹数据中所蕴含的几何、语义信息是对道路变化信息的直接感知.对于道路局部微观变化、道路变化类型、真实与语义变化的判别相比传统方法更具优势.本研究以道路弧段缓冲区为基本单元,运用轨迹数据中的几何、语义信息,检测道路变化、分析变化类型、区分物理与语义变化、提取变化实体,最后进行增量信息融合.
2 道路变化检测与更新方法
道路变化检测与更新方法的基本思想:对旧道路数据按照道路交叉点分割为道路弧段,构建缓冲区.以缓冲区为基本单元,分析缓冲区内的轨迹几何特征(方向、转角)、交通语义信息(速度、流量),根据轨迹线与缓冲区的空间关系确定正向变化类型,根据交通流量的时间变化模式剔除语义变化,确定负向变化类型.根据道路变化类型,提取增量信息、更新道路数据,如图2所示.
2.1 众源轨迹数据预处理及数据组织
根据文献[28]中方法预处理原始轨迹,删除噪音数据及轨迹冗余点.对旧道路网数据按照道路交叉点分割道路,生成道路弧段.借鉴文献[2,23]中的方法,根据道路等级构建不同宽度的道路弧段缓冲区,缓冲区半径需根据实验数据而定,取值范围在11~32 m之间.顾及道路变化实体提取与数据组织,按照道路变化类型建立如图3中的数据存储结构.每一种变化类型对应记录该类变化所有变化实体的几何信息、轨迹数据和语义信息.

Fig. 3 The data structure of road change information.图3 道路变化数据组织
2.2 众源轨迹检测道路变化
2.2.1 道路正向变化检测
对于每一条道路弧段缓冲区内的轨迹数据集,按照车辆ID与时间先后顺序构建轨迹线,运用轨迹几何特征(方向、转角)、交通语义信息(速度、流量)、轨迹线与缓冲区的空间关系来确定道路变化类型,如图2中的Step2.1所示.道路变化检测与变化类型分析方法:
1) 无变化类型.轨迹车行方向与道路的行车方向一致,且轨迹数据全落入道路弧段缓冲区内(如图4(a)所示),说明该道路无变化,删除该道路缓冲区内的所有轨迹.
2) 噪音干扰无变化.由于在道路交叉口、停车场等车辆停顿区域轨迹数据密集,出现沿缓冲区边缘呈团块状分布的干扰轨迹,导致缓冲区无法准确叠置判断(如图4(b)所示).这些轨迹的行车速度为0且分布于道路缓冲区边缘,根据轨迹速度、与缓冲区的距离来识别删除.如图4(b)中缓冲区外的轨迹为干扰轨迹,尽管不在缓冲区内仍删除.
3) 局部新增不改道类型.轨迹线与缓冲区从出到进共有2次相交,2交点之间的旧道路路段交通流量大于0,且该部分轨迹速度为车辆正常速度.如图4(c)所示,新增道路与道路缓冲区有2次相交,交点分别为p1,p2且道路段|p1p2|交通流量大于0、车速正常.对于该类变化,将落入缓冲区内的轨迹删除,将缓冲区外该部分新增轨迹写入到该变化类型的数据集中(如图3中的数据组织结构),最后删除该部分新增轨迹.
4) 改道新增类型.该类型与类型3的区别在于道路上出现不同行车方向上局部废弃的情形,且新增与废弃2种类型同时存在.如图4(d),4(e)所示,同一行车方向上的新增轨迹与缓冲区有出去、进入2次相交,相交点之间的旧道路|p1p2|交通流量在不同方向上出现为0的情形.对于该类型首先按照轨迹行车方向分类,计算与缓冲区进出的2个交点p1,p2.对于废弃道路类型,提取交点之间路段(即|p1p2|)的几何数据,并将路段|p1p2|不同方向上的交通流量信息写入到负向变化数据集中(如图3数据组织结构).将新增轨迹写入道路正向变化数据集中,并删除轨迹图层中的该部分轨迹数据.
5) 道路延长类型.道路延长包括一端延长(如图4(f)所示)和2端延长(如图4(g)所示).一端延长指道路缓冲区内的轨迹线从道路的1个方向流出,经过一定时间间隔后从相反方向全部流入,轨迹在非缓冲区域出现集体转弯点,轨迹转角约180°;2端延长指新增轨迹线与道路缓冲区的交点分别是2个不同缓冲区的端点,如图4(g)中的交点p1p2.对于一端延长类型根据轨迹线与道路相交关系、行车方向及转弯(转角)来探测,将缓冲区外新增轨迹写入道路变化数据集中,并删除缓冲区内所有轨迹;对于两端延长类型,删除缓冲区内的轨迹数据,新增轨迹保留在轨迹数据图层中,暂不写入数据集.
6) 整体新增类型.包括单向新增道路类型(如图4(i)所示)、双向新增道路类型(如图4(h)(j)所示).其中图4(i)和图4(j)这2种类型与道路缓冲区呈相交后平行汇合关系,与道路缓冲区有1次相交,相交后的轨迹车行方向与道路行车方向一致,根据轨迹的车行方向确定是单向还是双向新增.对于这类轨迹直接删除缓冲区内的轨迹数据,暂不写入正向变化数据集.图4(h)中的变化类型横穿道路缓冲区,表明该新增道路与旧道路有交点,这部分轨迹全部保留,不删除也不写入正向变化数据集.当所有道路缓冲区处理完毕,轨迹数据图层中保留的轨迹数据即是整体新增道路和2端延长类型.由于稀疏采样轨迹难以准确探测道路车道,对道路拓宽变化类型本文暂不讨论,本文轨迹运动特征参数计算参照文献[29]中的方法.
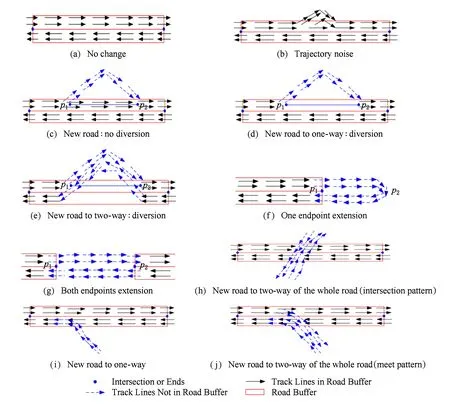
Fig. 4 Detection of the positive changes of road using trajectory geometry information and traffic flow.图4 基于轨迹运动几何特征与交通语义信息的道路正向变化检测
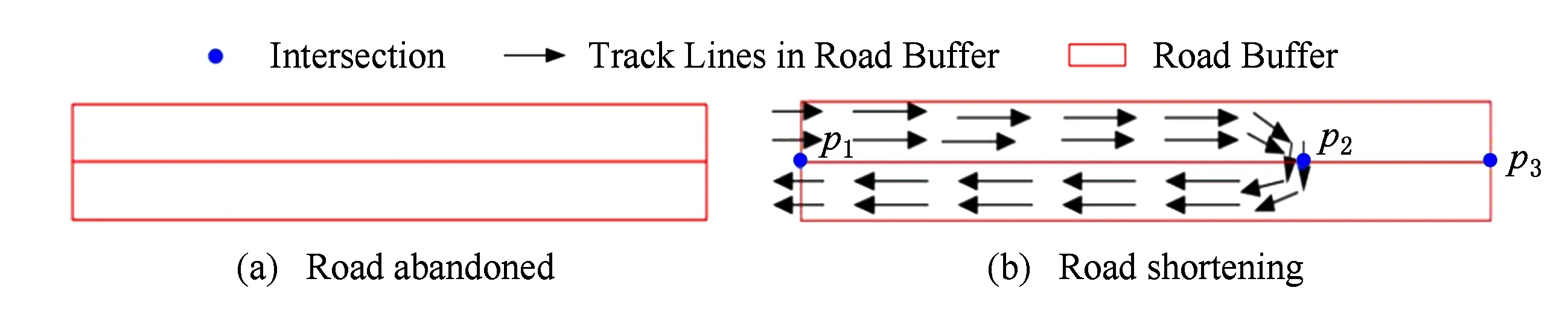
Fig. 5 Detection of the negative changes of road using traffic flow.图5 负向变化检测
2.2.2 道路负向变化检测
将道路缓冲区内轨迹线数量总和作为该道路在该时间段的交通流量.如果道路弧段缓冲区内没有轨迹(如图5(a)所示),说明该道路弧段可能消失废弃,称为疑似消失道路.每一条疑似消失道路记录几何数据、交通流时间序列信息,如图2中Step2.2所示.对于道路改道中的局部变化如单向改道(如图4(d)所示)、双向改道(如图4(e)所示),已在2.2.1节中阐述.对于道路一端废弃缩短的局部变化(如图5(b)所示),轨迹在缓冲区内某处整体转向,废弃部分道路交通流量为0.如图5(b)所示,所有轨迹在p2处出现转弯逆行,道路段|p2p3|交通流量为0.对于该类变化,根据轨迹转向,求出转弯点p2,提取道路段|p2p3|几何数据,记录交通流量时间序列信息,并删除道路缓冲区内的所有轨迹.
对提取的疑似消失道路,根据交通流量时空变化模式确定道路变化类型,区分真实变化与语义变化,剔除语义变化的道路弧段.交通流量变化模式分为4类:
1) 短时间(设置时间窗口Twindow)的临时交通管制.如图6(a)所示,由于体育赛事、交通事故等原因,使道路在短时间内禁止通行,交通流量为0.时间窗口的大小需要根据实际情况而定,不同的时间窗口蕴含不同的语义变化,如交通事故一般为几小时、道路维护为一周或更长.
2) 轨迹数据在道路上的覆盖差异,如图6(b)所示,由于车行频率不同,导致一些道路没有轨迹数据,则出现交通流量不等长时间间隔为0的变化模式.以上2种交通流量变化模式是交通语义变化,道路实体在物理世界并未发生真实变化.
3) 道路废弃消失,如图6(c)所示,道路段的交通流量连续长时间为0,该类变化表征道路实体在物理世界发生了真实变化.
4) 局部道路变化,包括同一道路上不同方向的变化(方向限行)、整条道路中的部分变化.如图6(d)所示,道路限行方向上的交通流量为0,反之交通流量增大,可推断出道路的部分通行及限行模式.
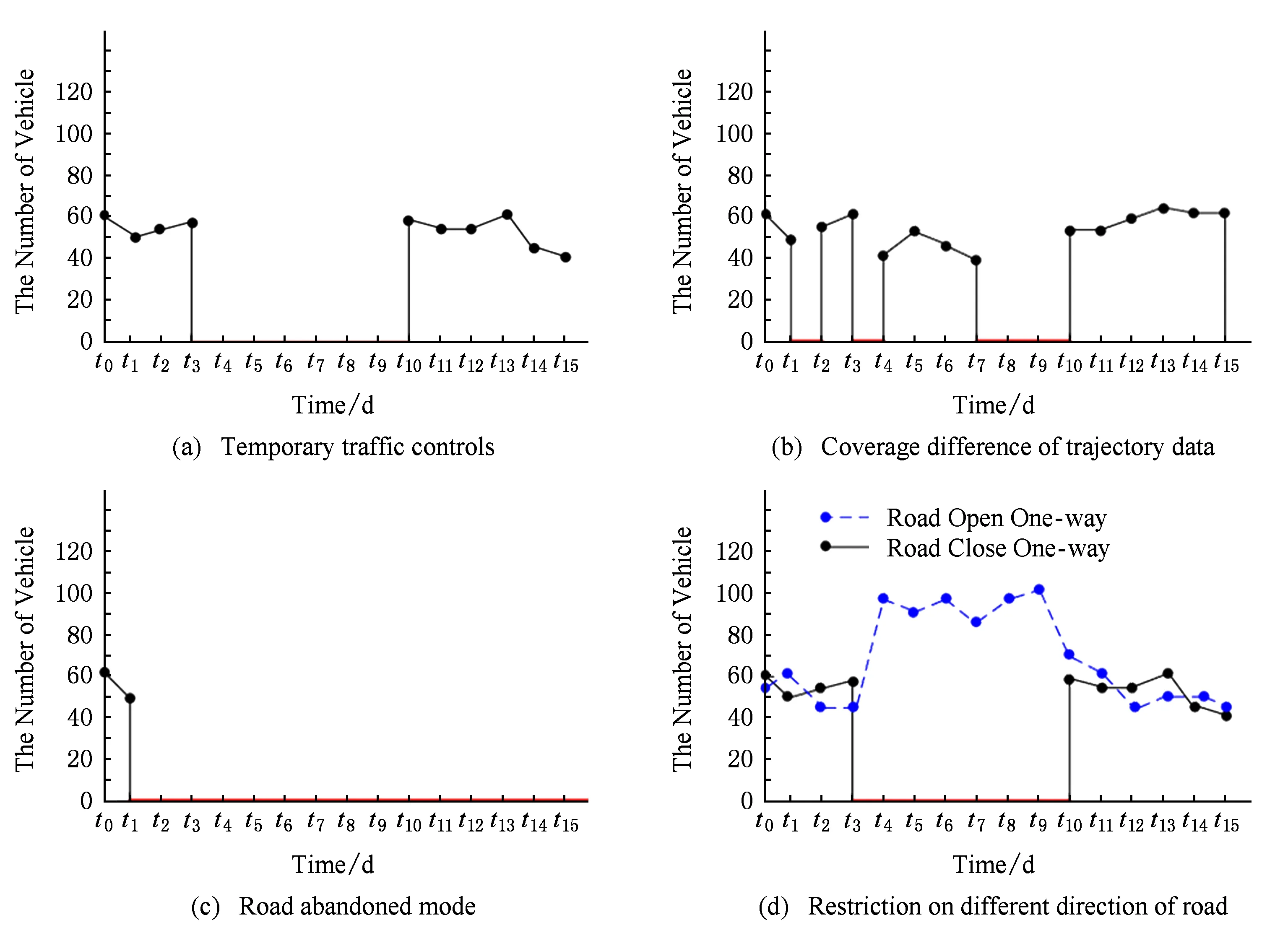
Fig. 6 Distinguish the negative change of road using spatio-temporal pattern of traffic flow.图6 交通流量时空模式识别道路负向变化
2.3 道路增量信息提取
2.3.1 正向增量信息提取
在图2中Step2.1过程中已将局部道路变化类型中的新增轨迹写入到相应的数据集中,还需对整体新增与2端延长类型分类.首先将这些轨迹数据按时间信息延长一定距离(由于道路缓冲区的原因,轨迹线需延长1~5个轨迹点),求出2端与之相交的道路弧段,并记录弧段ID.计算轨迹线与道路缓冲区的交点是否为道路弧段端点,如果轨迹线2交点是2条不同道路的端点,则是2端延长类型,如图4(g)所示.根据每条轨迹相交的弧段ID和相交点对轨迹进行分组,相交弧段完全相同的分为一组,根据相交点与轨迹车行方向确定道路变化类型.将分好组的轨迹数据集按照道路变化类型写入变化数据集中,如图2中的Step3.1所示.
从分好组的轨迹数据集中,依次取出每条道路所对应的轨迹集合,按照文献[30]中的方法构建约束Delaunay三角网,提取道路中心线,如图2中的Step3.2所示.如果所对应的轨迹点数据较少,则需将轨迹点按照车辆ID与时间顺序连接成轨迹线,对轨迹线插值加密后建约束Delaunay三角网提取道路中心线,并对道路中心线平滑处理,如图7(b)所示.当道路变化集合中的所有轨迹数据提取完毕,即完成了正向增量信息的提取.

Fig. 7 Extraction of incremental information.图7 增量信息提取方法
2.3.2 负向增量信息提取
首先设置时间窗口Twindow,读取负向变化数据集中每条道路弧段的交通流量信息并进行时间序列分析,如果连续为0的时间长度大于等于Twindow,说明该道路废弃消失,反之该道路弧段为其他类型的语义变化,如图7(c)所示.对于真实负向变化,根据记录信息提取道路变化几何数据,如图2中Step3.3~3.5所示.
2.4 道路增量信息融合
根据道路变化信息类型,采取相应的更新操作进行增量信息融合,如图2中Step4.1~4.3.由于轨迹数据是一种无尺度、高噪音的VGI数据,在数据融合过程中必然存在几何拓扑错误,包括相交节点断开、节点出头、拓扑连通错误等.本实验利用ArcGIS软件对更新后的道路数据进行拓扑错误检查与拓扑一致性维护,以保证道路数据的质量.
3 实验与结果分析
3.1 数 据
轨迹数据为深圳市2011年4月共7天的出租车GPS轨迹,轨迹数据包括车辆ID、GPS时间、GPS经纬度等信息.轨迹点采样间隔为10~120 s不等,每天共有轨迹点约11 435 573个,生成轨迹线为416 505条(如图8(a)所示).待更新道路数据为2010年比例尺为1∶10 000万深圳市标准道路矢量数据(如图8(b)所示).本研究以深圳市为实验区域,采用PostGIS数据库存储轨迹数据与道路数据,运用Python语言、ArcPy提供的数据接口进行算法实验.

Fig. 8 The experimental area and experimental data.图8 实验区及实验数据
3.2 结果与分析
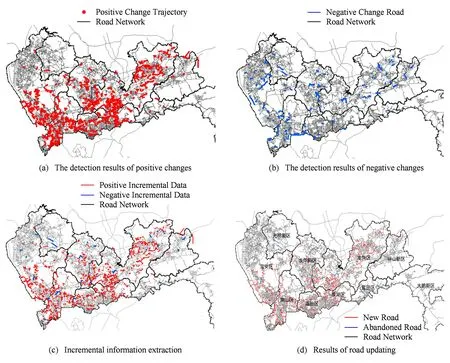
Fig. 9 The main steps and the results of the experiment.图9 实验主要步骤及结果展示
按照文献[28]中的方法对轨迹数据进行清洗,对被更新道路按照道路交叉点打断生成道路弧段基本单元.按照文献[2,23]中方法根据道路等级构建不同宽度的道路缓冲区,缓冲区半径取值范围在11~32 m之间.运用道路缓冲区内轨迹数据的运动几何信息(方向、转角)、交通语义信息(速度、流量)进行道路变化检测(如图9(a)(b)所示)、确定道路变化类型,其中交通流量分析时间窗口Twindow为7 d.根据道路变化信息类型,运用Delaunay三角网模型提取866条新增道路弧段(如图9(c)所示),多分布在南山区、龙华区、龙岗区等处,主要包括开发新区、住宅新区建设中的新建道路、环城路、商业步行街等,且以街道、居民区巷道等低等级道路为主.通过交通流量时间序列分析剔除145条语义变化道路弧段,提取26条消失道路弧度,如图9(c)所示.道路消失多发生在老城区、城郊结合部的一些次要街道、小巷等低等级道路目标中.主城区如罗湖区、福田区等城市CBD中心道路消失废弃较少,而这些区域的道路语义变化相对较多,主要是由于缓解交通拥堵压力、临时交通管制等造成.最后将增量信息与旧道路网数据集成融合,如图9(d)所示.
3.2.1 道路变化检测结果分析
以被更新标准道路矢量数据为参考,将实验结果与文献[12]中地图匹配技术更新实验结果对比分析.在道路变化检测发现方面,文献[12]运用地图匹配技术进行变化检测无法判断道路变化类型,如图10(a)(b)所示,尤其对于不同方向上的真实变化与交通语义变化,而将语义变化作为废弃消失道路处理.本方法根据给定时间窗口Twindow,通过对交通语义信息的时间序列分析区分道路的真实变化与语义变化,剔除了语义变化的道路,相比文献[12]方法更显优势.如图10(b)(c)所示,本文方法根据交通流量变化模式识别道路真实变化(废弃、缩短、改道废弃等)与语义变化(临时交通管制等),利用7 d的轨迹数据提取了26条废弃消失道路,剔除了145条语义变化道路.而文献[12]的方法无法识别语义变化,共提取171条废弃消失道路,致使更新结果错误不断累积增大.
3.2.2 道路更新结果分析
将更新后道路数据与遥感影像叠加进行定性评价,如图11(a)(b)为宝安区桃源盛景园附近范围的实验结果.从图11中可知本文方法更新后的道路几何数据精度高,且保持正确拓扑关系.对新增线数据采用缓冲区检测方法来评价精度,以2011年OSM数据为参考,分别建立2 m,5 m,7 m为半径的缓冲区进行道路长度统计分析,对比结果如图11(c)所示.实验表明本方法更新后的道路几何数据精度在2 m缓冲区的高精度结果有约18%的提高.本研究以道路弧段缓冲区为基本单元分析轨迹几何、语义信息进行道路变化检测,在保持道路数据拓扑正确性方面,具有明显优势(如图11(d)所示),相比常规的地图匹配技术简单、高效.
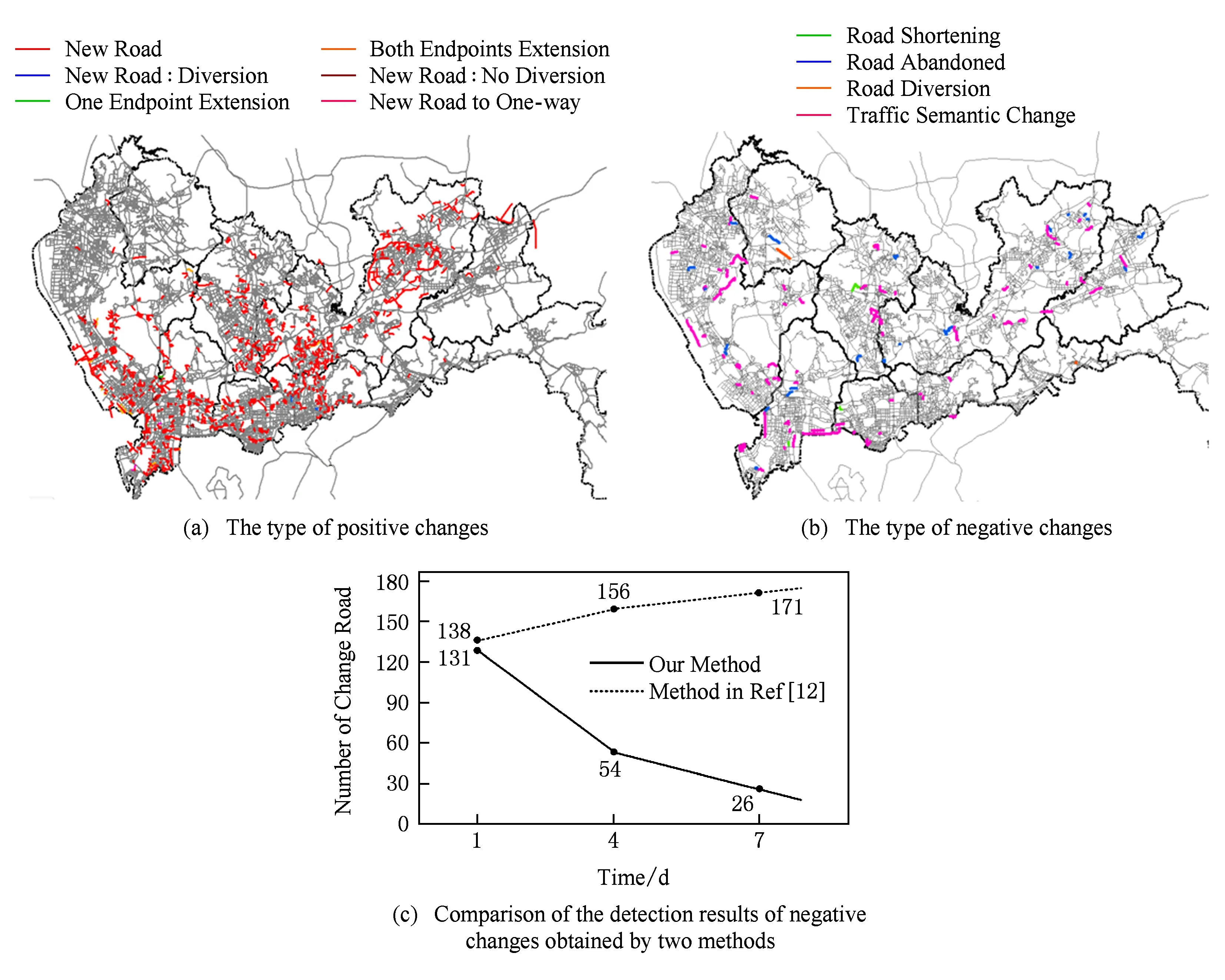
Fig. 10 Comparative analysis of the result of road change detection.图10 道路变化检测结果比较分析
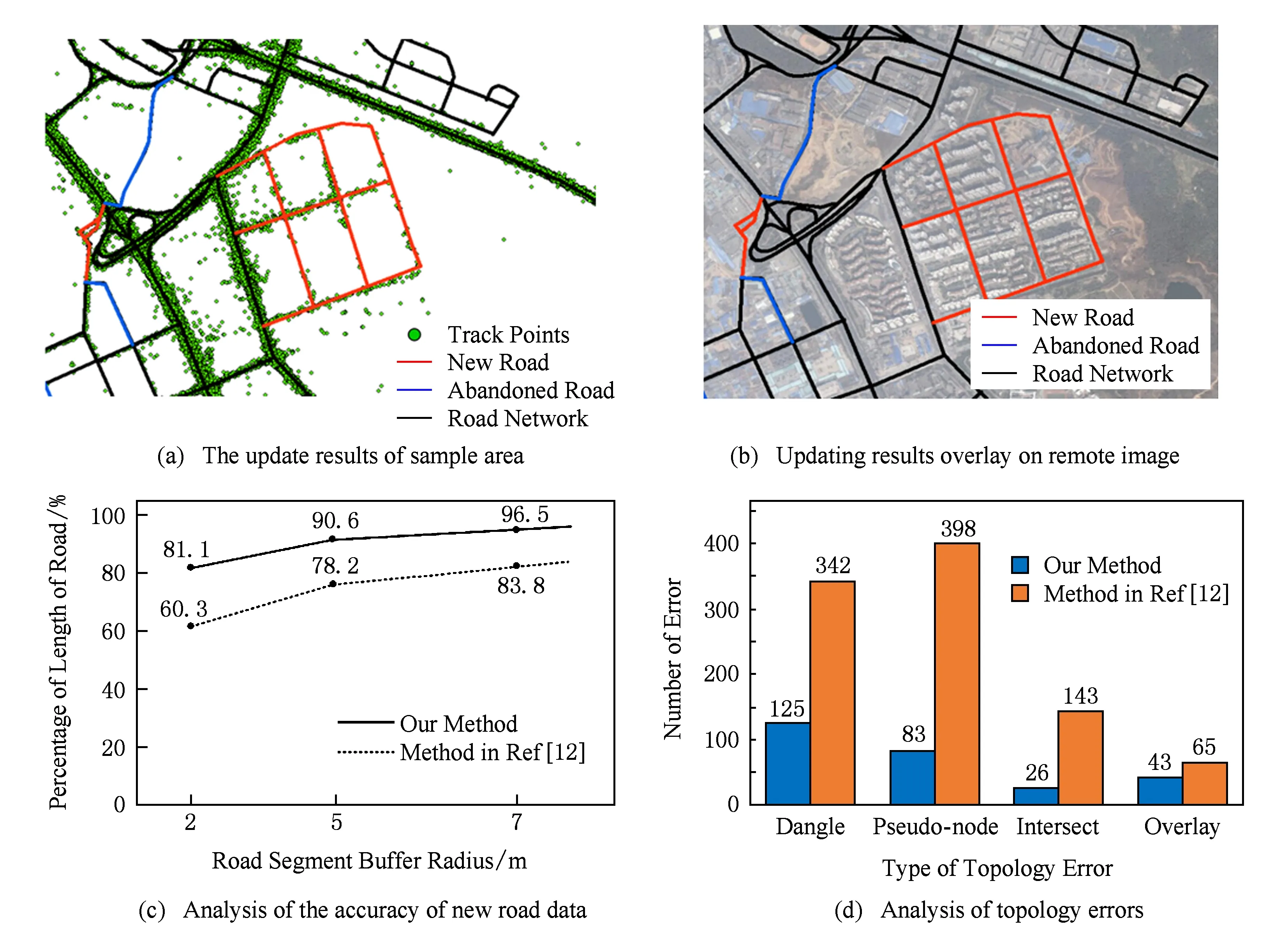
Fig. 11 Evaluation of the result of road updating.图11 道路更新结果分析
3.2.3 道路更新结果验证
本文运用深圳市天地图影像*http://map.tianditu.com、OSM道路网矢量数据*http://planet.openstreetmap.org/planet/对更新结果进行验证分析,部分区域道路更新结果验证如图12所示.提取的866条新增道路弧段中有749条道路弧段并未发生变化(如图12(c)中B,C处),其原因在于被更新数据(比例尺为1∶10 000)的不完整性,但这证明了本文方法的有效性.剩余的117道路弧段中新增道路弧段94条(如图12(c)中A处),错误提取的有23条.错误识别的新增道路弧段,多在复杂道路交叉口处由于轨迹采样稀疏导致的错误识别.消失的道路中,真实消失道路有7条,剩余19条道路弧段(如图12(c)中D处)是由于道路建设(如修建地铁等)导致的长时间交通通行管制.本方法在复杂道路交口处的增量信息提取精度不够,如图12(c)中C处对于转盘、立交桥等处的增量数据有待提高.
另外,由于车辆轨迹的局限性,对于城市低等级道路提取还不全.本方法以GPS轨迹点图层为更新源,道路网作为被更新图层,适用于图层级别的批处理更新.
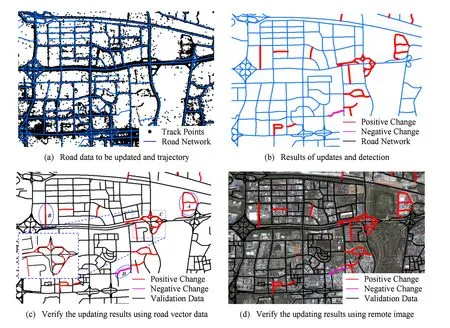
Fig. 12 The validity of the update result of Nanshan District in Shenzhen.图12 深圳市南山区部分区域更新结果验证分析
3.3 数据与参数讨论
本方法的更新结果也受到道路数据、轨迹数据、缓冲区宽度的影响,体现在:
1) 不同比例尺.比例尺越大道路数据内容越详细完整,反之越简单.本文检测出来的正向增量数据较多(图9(a)),其原因是被更新数据在城市低等级支路处覆盖度低(比例尺1∶10 000),而车辆轨迹能识别这些道路并作为新增道路;反之,如果更新大比例尺数据(1∶1 000),由于车辆数据的局限性,一些道路也会错误识别为废弃道路.故道路数据尺度的选择仍是一个不确定性问题.
2) 轨迹数据的时间跨度.对于负向变化检测需根据设置的时间窗口Twindow分析交通流量变化模式,区分真实变化与语义变化.而时间窗口Twindow的设定不仅需要交通领域知识,也要考虑轨迹数据的时间跨度.长时间跨度的轨迹数据序列对道路变化类型的判别准确性更高.由于本文轨迹数据有限(时间跨度为7 d,Twindow为7 d),如图11(b)中的废弃道路可能是道路维护改造(遥感影像可看出),并非废弃,故难以精确判断,这就是轨迹时间跨度不够导致的.
3) 道路缓冲区的宽度设置.本文以道路弧段缓冲区为基本单元分析提取轨迹信息,缓冲区的设置借鉴文献[2,23]中的方法,该方法相比地图匹配方法速度快,但缓冲区宽度的优化设定对结果有一定影响.本文根据道路等级对应的道路宽度标准和GPS轨迹定位误差来综合设定缓冲区半径.
4 结论与展望
本文针对运用车辆轨迹数据进行矢量道路数据的变化检测与更新问题,提出了以道路弧段缓冲区为基本单元,通过分析轨迹运动几何信息与交通语义信息检测道路变化、确定变化类型、区分真实变化与语义变化,运用Delaunay三角网几何模型提取新增道路,运用交通流时间序列分析提取消失道路,最后进行增量信息融合.运用深圳市出租车GPS轨迹进行实验分析,证明了本文方法的可行性与创新性.
本文的创新点为:
1) 运用轨迹几何信息和交通语义信息对道路变化类型进行推断识别;
2) 将道路变化类型推断与增量信息提取相结合,综合运用Delaunay三角网、时间序列分析方法快速实现路网图层级别的批处理更新.
本研究仅利用7 d的出租车GPS轨迹数据进行实验,由于出租车轨迹数据并未完全覆盖城市道路网络,使得轨迹数据在时间跨度及种类上具有局限性.后续工作包括:1)本文方法的进一步优化,包括道路缓冲区的优化设置、道路拓宽类型的判别、道路属性数据更新等.同时,如何确定众源轨迹数据的尺度信息,并进行多尺度的道路数据更新将是未来的研究方向.2)本文仅对车辆轨迹更新道路网的技术方法进行实验分析,后续需运用大数据平台如Hadoop,Spark等针对轨迹大数据挖掘处理方法进行探索研究.
[1]Chen Jun, Wang Donghua, Shang Yaoling, et al. Master design and technical development for national 1:50000 topographic database updating engineering in China[J]. Acta Geodaetica et Cartographica Sinica, 2010, 39(1): 7-10 (in Chinese)(陈军, 王东华, 商瑶玲, 等. 国家1:50 000 数据库更新工程总体设计研究与技术创新[J]. 测绘学报, 2010, 39(1): 7-10)
[2]Hu Yungang, Chen Jun, Zhao Renliang, et al. Macthing of roads under different scales for updating map[J]. Geomatics and Information Science of Wuhan University, 2010, 35(4): 451-456 (in Chinese)(胡云岗, 陈军, 赵仁亮, 等. 地图数据缩编更新中道路数据匹配方法[J]. 武汉大学学报: 信息科学版, 2010, 35(4): 451-456)
[3]Lee S G, Lee D H, Lee S W. Network-oriented road map generation for unknown roads using visual images and GPS-based location information[J]. IEEE Trans on Consumer Electronics, 2009, 55(3): 1233-1240
[4]Goodchild M F. Citizens as sensors: The world of volunteered geography[J]. GeoJournal, 2007, 69(4): 211-221
[5]Liu Dayou, Chen Huiling, Qi Hong, et al. Advances in spatiotemporal data mining[J]. Journal of Computer Research and Development, 2013, 50(2): 225-239 (in Chinese)(刘大有, 陈慧灵, 齐红, 等. 时空数据挖掘研究进展[J]. 计算机研究与发展, 2013, 50(2): 225-239)
[6]Meng Xiaofeng, Zhang Xiaojian. Big data privacy management[J]. Journal of Computer Research and Development, 2015, 52(2): 265-281 (in Chinese)(孟小峰, 张啸剑. 大数据隐私管理[J]. 计算机研究与发展, 2015, 52(2): 265-281)
[7]Guo Chi, Fang Yuan, Liu Jingnan, et al. Social awareness computation methods for location based services[J]. Journal of Computer Research and Development, 2013, 50(12): 2531-2542 (in Chinese)(郭迟, 方媛, 刘经南, 等. 位置服务中的社会感知计算方法研究[J]. 计算机研究与发展, 2013, 50(12): 2531-2542)
[8]Anmed M, Karagiorgou S, Pfoser D, et al. A comparison and evaluation of map construction algorithms using vehicle tracking data[J]. GeoInformatica, 2015, 19(3): 601-632
[9]Jang Xinhua, Liao Lüchao, Zou Fumin. Automatic detection algorithm for new roads based on trajectory of float cars[J]. Journal of Computer Applications, 2013, 33(2): 579-582 (in Chinese)(蒋新华, 廖律超, 邹复民. 基于浮动车移动轨迹的新增道路自动发现算法[J]. 计算机应用, 2013, 33(2): 579-582)
[10]Wu Hao, Tu Chuanchuan, Sun Weiwei, et al. GLUE: A parameter-tuning-free map updating system[C] //Proc of the 24th ACM Int Conf on Information and Knowledge Management. New York: ACM, 2015: 683-692
[11]Boucher C, Noyer J C. Automatic detection of topological changes for digital road map updating[J]. IEEE Trans on Instrumentation and Measurement, 2012, 61(11): 3094-3102
[12]Zhao Yue, Liu Jian, Chen Runqiang, et al. A new method of road network updating based on floating car data[C] //Proc of the IEEE Int Conf on Geoscience and Remote Sensing Symp (IGARSS). Piscataway, NJ: IEEE, 2011: 1878-1881
[13]van Winden K, Biljecki F, van der Spek S. Automatic update of road attributes by mining GPS tracks[J]. Transactions in GIS, 2016, 20(5): 664-683
[14]Costa G H R, Baldo F. Generation of road maps from trajectories collected with smartphone —A method based on genetic glgorithm[J]. Applied Soft Computing, 2015, 37(12): 799-808
[15]Tian Wenwen, Zhu Xinyan, Guo Wei. A VGI vector road data increment distinguishing research based on multilevel spreading algorithm[J]. Geomatics and Information Science of Wuhan University, 2014, 39(8): 963-967 (in Chinese)(田文文, 朱欣焰, 呙维. 一种 VGI矢量数据增量变化发现的多层次蔓延匹配算法[J]. 武汉大学学报: 信息科学版, 2014, 39(8): 963-967)
[16]Shan Zhangqing, Wu Hao, Sun Weiwei, et al. COBWEB: A robust map update system using GPS trajectories[C] //Proc of the 2015 ACM Int Joint Conf on Pervasive and Ubiquitous Computing. New York: ACM, 2015: 927-937
[17]Wang Yin, Liu Xuemei, Wei Hong, et al. CrowdAtlas: Self-updating maps for cloud and personal use[C] //Proc of the 11th Annual Int Conf on Mobile Systems, Applications, and Services. New York: ACM, 2013: 27-40
[18]Wang Yin, Wei Hong, Forman G. Mining large-scale GPS streams for connectivity refinement of road maps[C] //Proc of the 21st ACM SIGSPATIAL Int Conf on Advances in Geographic Information Systems. New York: ACM, 2013: 448-451
[19]Tang Luliang, Huang Fangzhen, Zhang Xueyan, et al. Road network change detection based on floating car data[J]. Journal of Networks, 2012, 7(7): 1063-1070
[20]Wu Tao, Xiang Longgang, Gong Jianya. Updating road networks by local renewal from GPS trajectories[J]. ISPRS International Journal of Geo-Information, 2016, 5(9): 163-180
[21]Boucher C, Noyer J C. Updating road network databases using GNSS[C] //Proc of the IEEE Int Conf on Systems Conf (SysCon). Piscataway, NJ: IEEE, 2011: 288-291
[22]Zhu Yanmin, Wang Yin, Forman G, et al. Mining large-scale GPS streams for connectivity refinement of road maps[J]. The Computer Journal, 2015, 58(9): 2109-2119
[23]Liu Changyong, Xiong Lian, Hu Xiangyun, et al. A progressive buffering method for road map update using OpenStreetMap data[J]. ISPRS International Journal of Geo-Information, 2015, 4(3): 1246-1264
[24]Ying Shen, Li Lin, Liu Wanzeng, et al. Change-only updating based on object matching in version databases[J]. Geomatics and Information Science of Wuhan University, 2014, 39(8): 963-967 (in Chinese)
(应申, 李霖, 刘万增, 等. 版本数据库中基于目标匹配的变化信息提取与数据更新[J]. 武汉大学学报: 信息科学版, 2009, 34(6): 752-755)
[25]Xu Jinghai, Li Qingquan. Navigable digital map data increment update based on temporal GIS[J]. Geomatics and Information Science of Wuhan University, 2008 ,33(11): 1182-1185 (in Chinese)(徐敬海, 李清泉. 基于时态GIS的导航电子地图增量更新研究[J]. 武汉大学学报: 信息科学版, 2008, 33(11): 1182-1185)
[26]Park S, Bang Y, Yu K. Techniques for updating pedestrian network data including facilities and obstructions information for transportation of vulnerable people[J]. Sensors, 2015, 15(9): 24466-24486
[27]Yang Min, Ai Tinghua, Yan Xiongfeng, et al,Change detection and updating by using map overlay for buildings on multi-scale maps [J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(4): 466-474 (in Chinese)(杨敏, 艾廷华, 晏雄锋, 等. 叠置运算支持下的跨比例尺城区居民地数据变化发现与更新[J]. 测绘学报, 2016, 45(4): 466-474)
[28]Liu Xuemei, Zhu Yanmin, Wang Yin, et al. Road recognition using coarse-grained vehicular traces, HPL-2012-26[R]. Beijing: HP Labs, 2012
[29]Dodge S, Weibel R, Forootan E. Revealing the physics of movement: Comparing the similarity of movement characteristics of different types of moving objects[J]. Computers, Environment and Urban Systems, 2009, 33(6): 419-434
[30]Yang Wei, Ai Tinghua. Road centerline extraction from crowdsoucing trajectory data[J]. Geography and Geo-Information Science, 2016, 32(3): 1-7 (in Chinese)(杨伟, 艾廷华. 基于众源轨迹数据的道路中心线提取[J]. 地理与地理信息科学, 2016, 32(3): 1-7)

Yang Wei, born in 1987. PhD candidate and student member of China Computer Federation. His main research interests include spatiotemporal trajectory data mining and visualization.

Ai Tinghua, born in 1969. Professor and PhD supervisor. His main research interests include map generalization and spatial data mining.
A Method for Road Network Updating Based on Vehicle Trajectory Big Data
Yang Wei and Ai Tinghua
(School of Resource and Environmental Sciences, Wuhan University, Wuhan 430079)
Vehicle trajectory data becomes an important approach to access and update of road information. However, conventional methods cannot identify road change type and extract change entities quickly using crowdsourcing trajectory data. To solve the problem, this paper propose a new method to use vehicle trajectory big data to detect and update changes rapidly in the road network. Firstly, road change type is identified by detecting and classifying the road change information using trajectory movement geometry information (direction, turn angle) and traffic semantic information(traffic volume, speed). Through analysis of trajectory data, the real physical change and traffic semantic change of road can be distinguished from each other. And then incremental information is extracted by Delaunay triangulation and traffic flow time series analysis. This method combines the road change type identifying and incremental data extraction through taking road segment buffer as basic unit. Finally, incremental information fusion is conducted according to road change type. An experiment using taxi GPS traces data in Shenzhen is verified the validity of the novel method. The experimental results prove that the method can identity road change type, and the accuracy of incremental data is improved about 18% compared with map matching method. Furthermore, the comparison analysis of the road network update results is also carried out to confirm that the method is suitable for layer-level updates.
trajectory big data; change detection; road network update; crowdsourcing; traffic semantic information
2016-08-16;
2016-10-20
国家自然科学基金项目(41531180);国家“八六三”高技术研究发展计划基金项目(2015AA1239012) This work was supported by the National Natural Science Foundation of China (41531180) and the National High Technology Research and Development Program of China (863 Program) (2015AA1239012).
艾廷华(tinghua_ai@163.net)
TP391
猜你喜欢
电子设计工程(2022年24期)2022-12-23
现代工业经济和信息化(2022年9期)2022-11-03
应用科学学报(2020年6期)2021-01-04
电加工与模具(2020年2期)2020-04-29
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2018年7期)2018-09-14
沈阳工业大学学报(2018年1期)2018-01-08
中国工程机械学报(2016年5期)2016-03-07
项目管理技术(2015年3期)2015-04-23
时代人物(2014年10期)2015-01-28